
Performance Analysis of Empennage Configurations on a Surveillance and Monitoring Mission of a VTOL-Plane UAV Using a Computational Fluid Dynamics Simulation


Abstract
:1. Introduction
2. Research Methods
2.1. Design Requirements and Objective
2.2. Conceptual Design
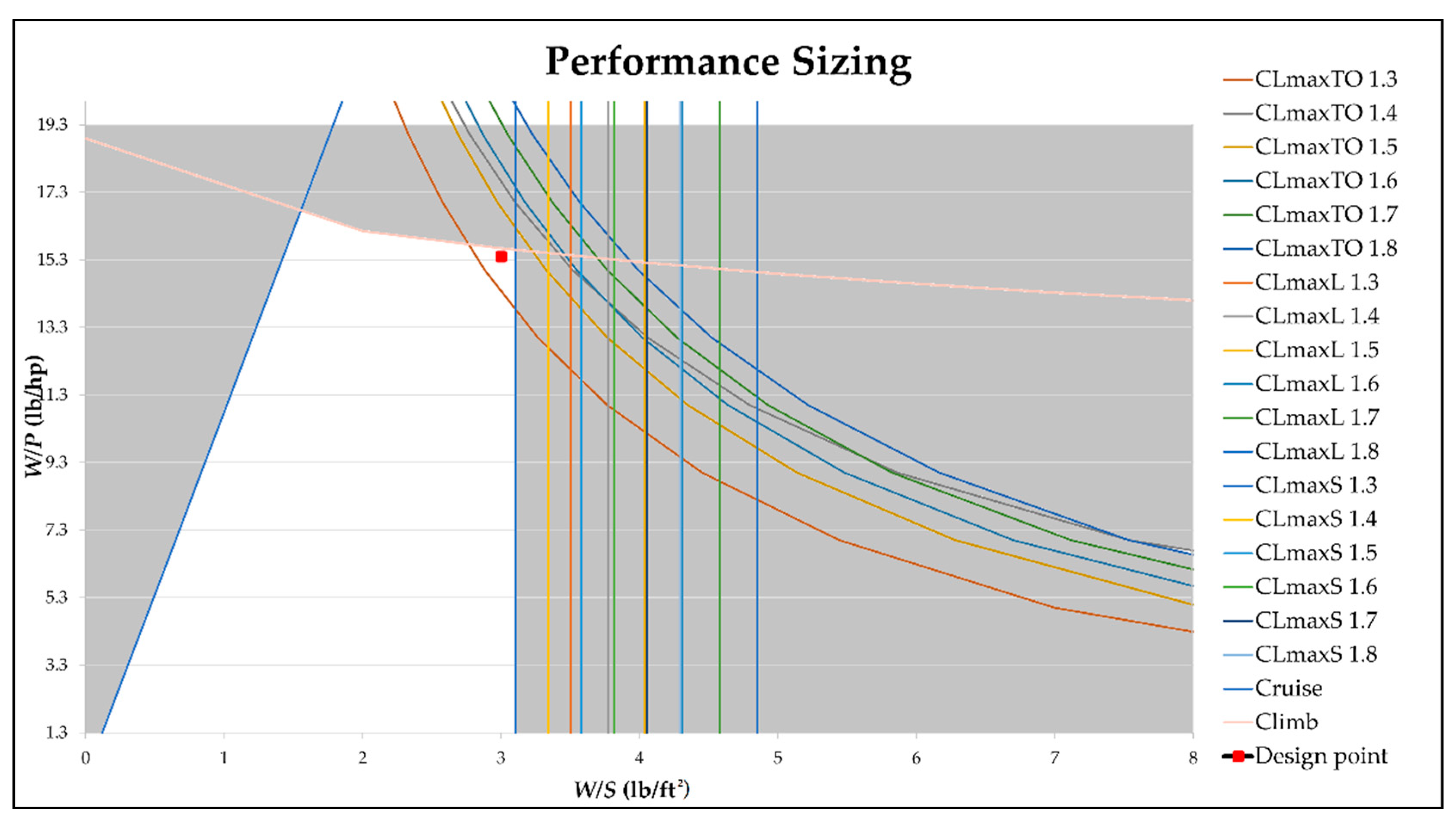
2.3. Preliminary Design
- Fuel fraction, these equations are shown in Table 2:
- = Fuel fraction
- = Cruising range (miles)
- = Loiter time (hours)
- = Propeller efficiency
- = Specific fuel consumption (lbs/hp/hr)
- = Lift to drag ratio
- = Loiter velocity (miles per hour)
- 2.
- Mission fuel fraction (Mff):
- Mff = Mission fuel fraction
- 3.
- Total fuel (WF):
- WF = Total fuel weight (kg)
- WTO = Take-off weight (kg)
- Mfres = The ratio of reserve fuel weight to total fuel weight
- 4.
- Empty weight (WE) and take-off weight (WTO):
- WE = Empty weight (kg)
- 5.
- Regression constant a and b:
- Y = Predicted value
- X = Independent variable
- = Residual value
- a = Regression constant a
- b = Regression constant b
- n = Number of comparison planes
- 6.
- Stall speed performance:
- = Stall speed wing loading (lb/ft2)
- = Air density (slug/ ft2)
- = Stall speed (ft/s)
- = Stall speed lift coefficient
- 7.
- Take-off performance (VTOL to fixed-wing transition):
- = Take-off power loading (lb/hp)
- = Take-off wing loading (lb/ft2)
- = Take-off parameter
- = the ratio of the density of air at the take-off altitude to the density of air at sea level
- = Take-off lift coefficient
- STO = Take-off distance (ft)
- 8.
- Climb performance:
- = Climb power loading (lb/hp)
- = Climb wing loading (lb/ft2)
- Fclimb = Thrust used for climb (%)
- RC = rate of climb (ft/min)
- CD0TOup = zero lift drag coefficient of the airplane drag polar at take-off with fixed gear
- AR = wing aspect ratio
- = Take-off Oswald’s efficiency factor
- 9.
- Cruise performance:
- = Cruise power loading (lb/hp)
- = Cruise wing loading (lb/ft2)
- Fcr = Thrust used for cruise (%)
- Ipower3 = index power, power coefficient needed according to landing gear configurations
- 10.
- Landing performance (fixed-wing to VTOL transition)
- = Landing wing loading (lb/ft2)
- = Landing weight (lb)
- = Landing lift coefficient
- = Landing velocity (ft/s)
2.4. Detailed Design
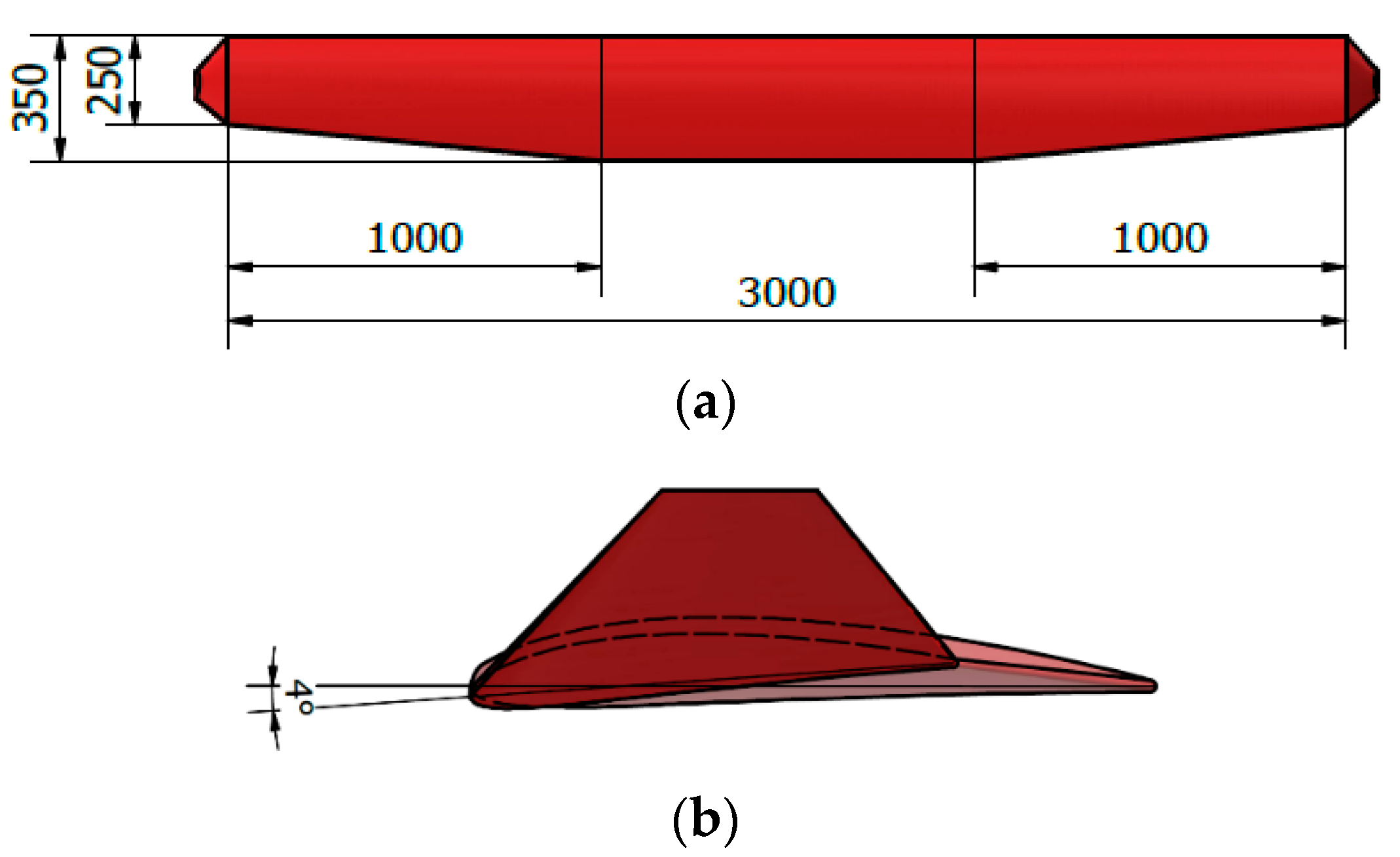
2.4.1. Wing Detailed Design
- s = Wing area (m2)
- b = Wing span (m)
- Ct = Tip chord (m)
- Cr = Root chord (m)
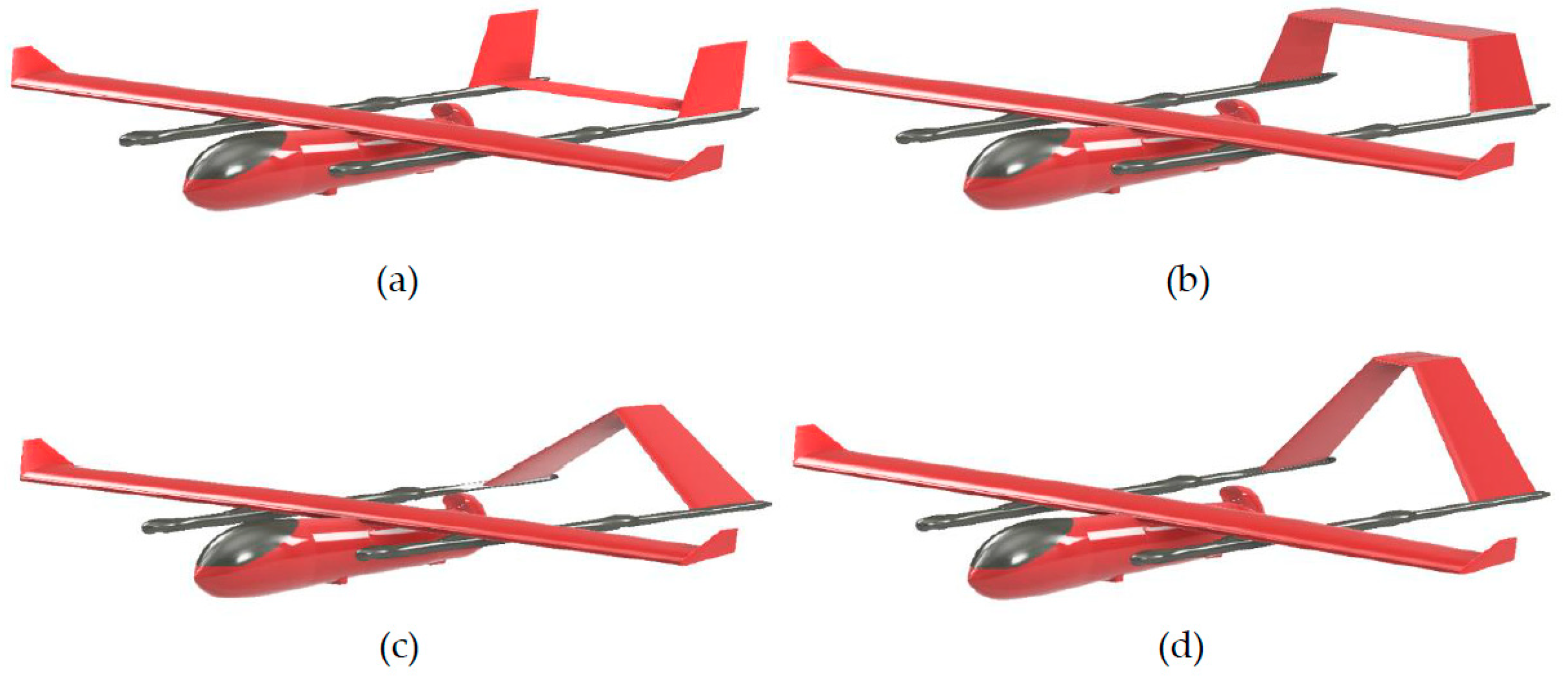
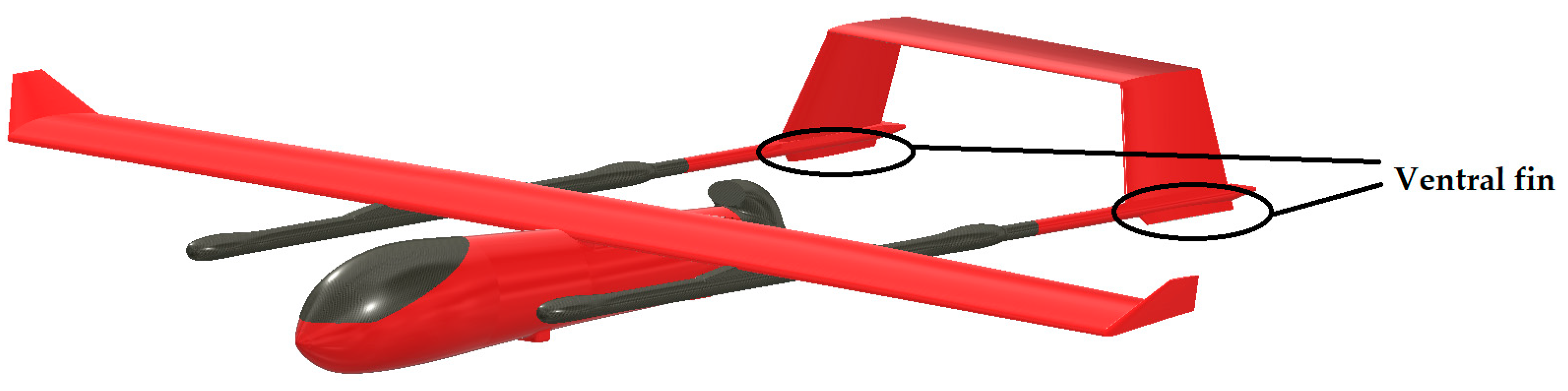
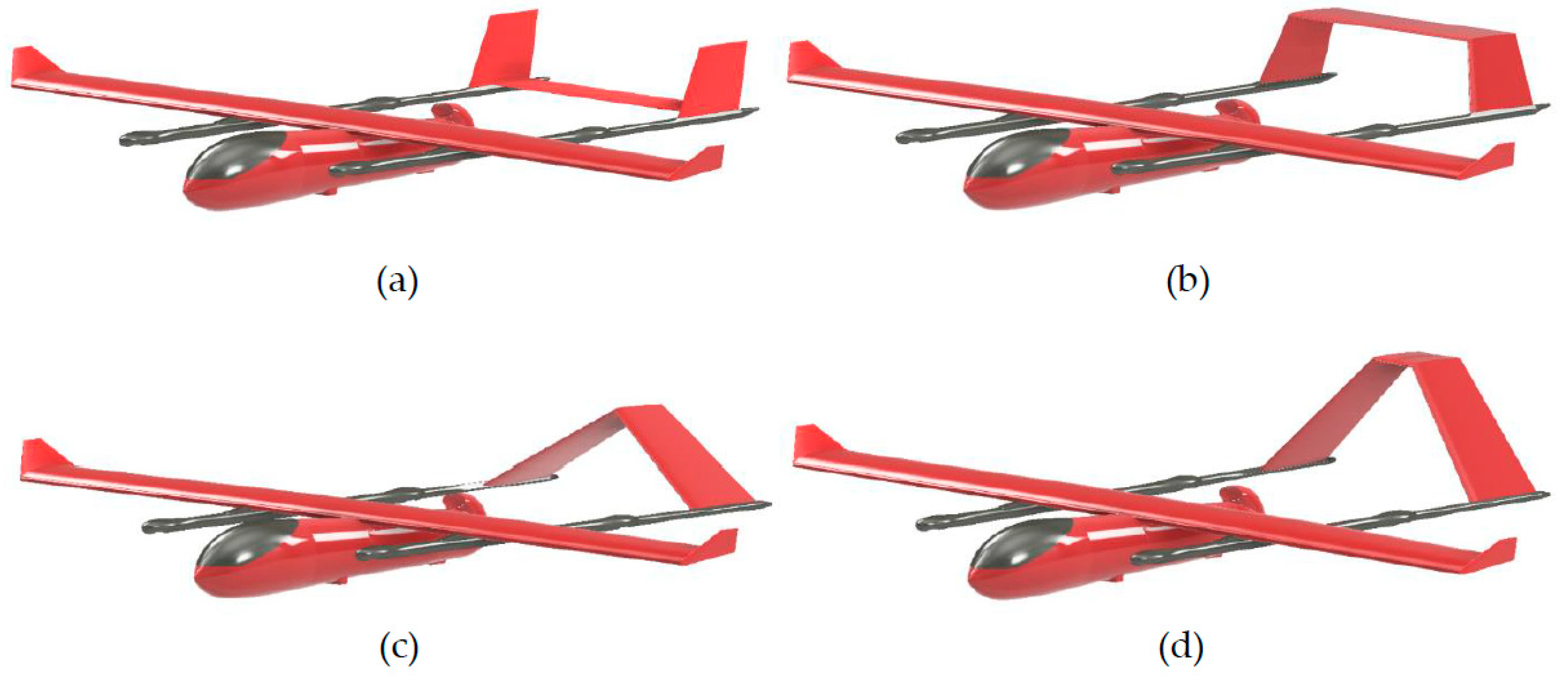
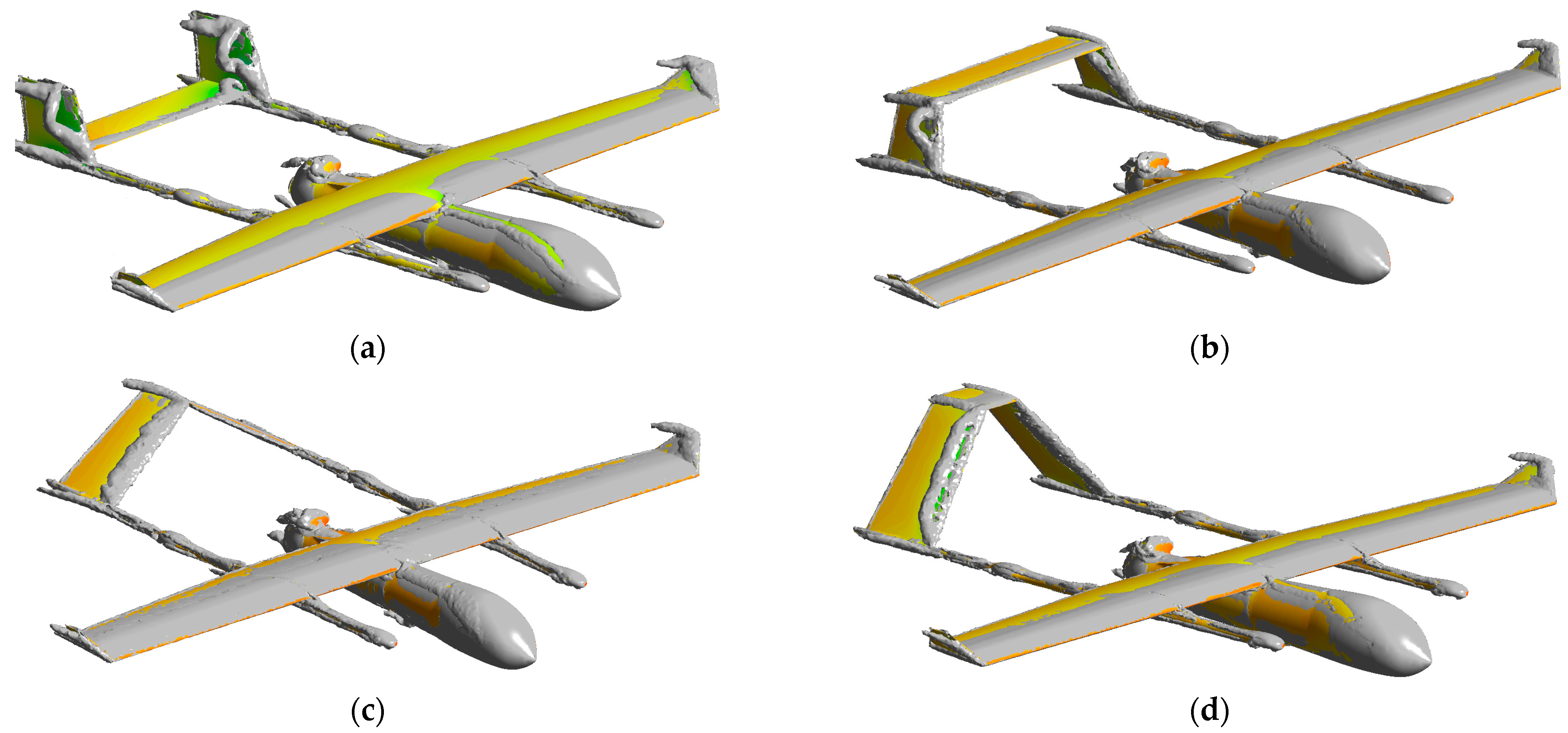
2.4.2. Detailed Design of the Empennage
- Vv = Vertical tail volume coefficient
- Vh = Horizontal tail volume coefficient
- Lv = Distance of 25% wing MAC to 25% vertical empennage MAC (m)
- Lh = Distance of 25% wing MAC to 25% horizontal empennage MAC (m)
- Sv = Vertical tail area (m2)
- Sh = Horizontal tail area (m2)
- SV-tail = V-tail area (m2)
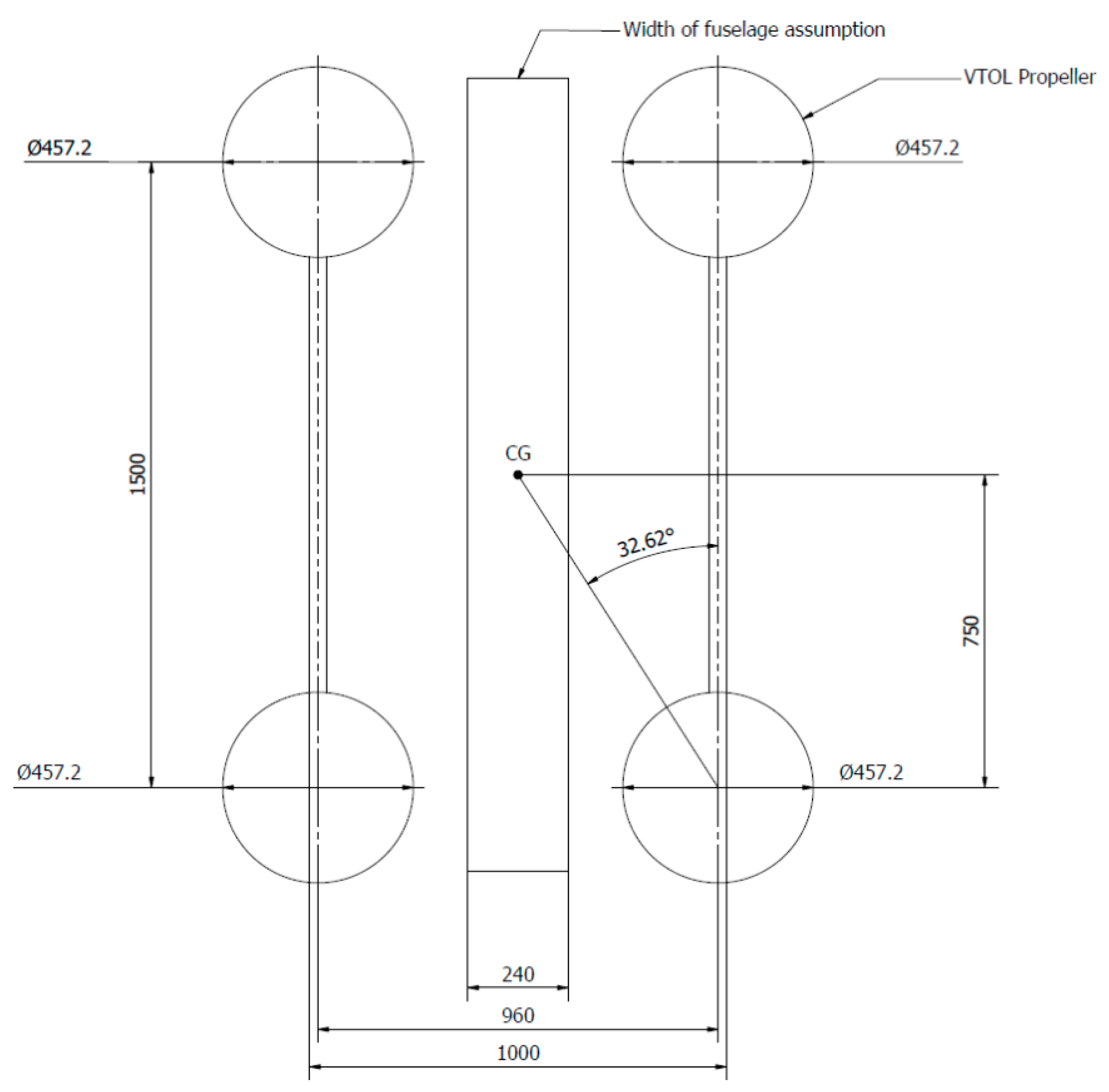
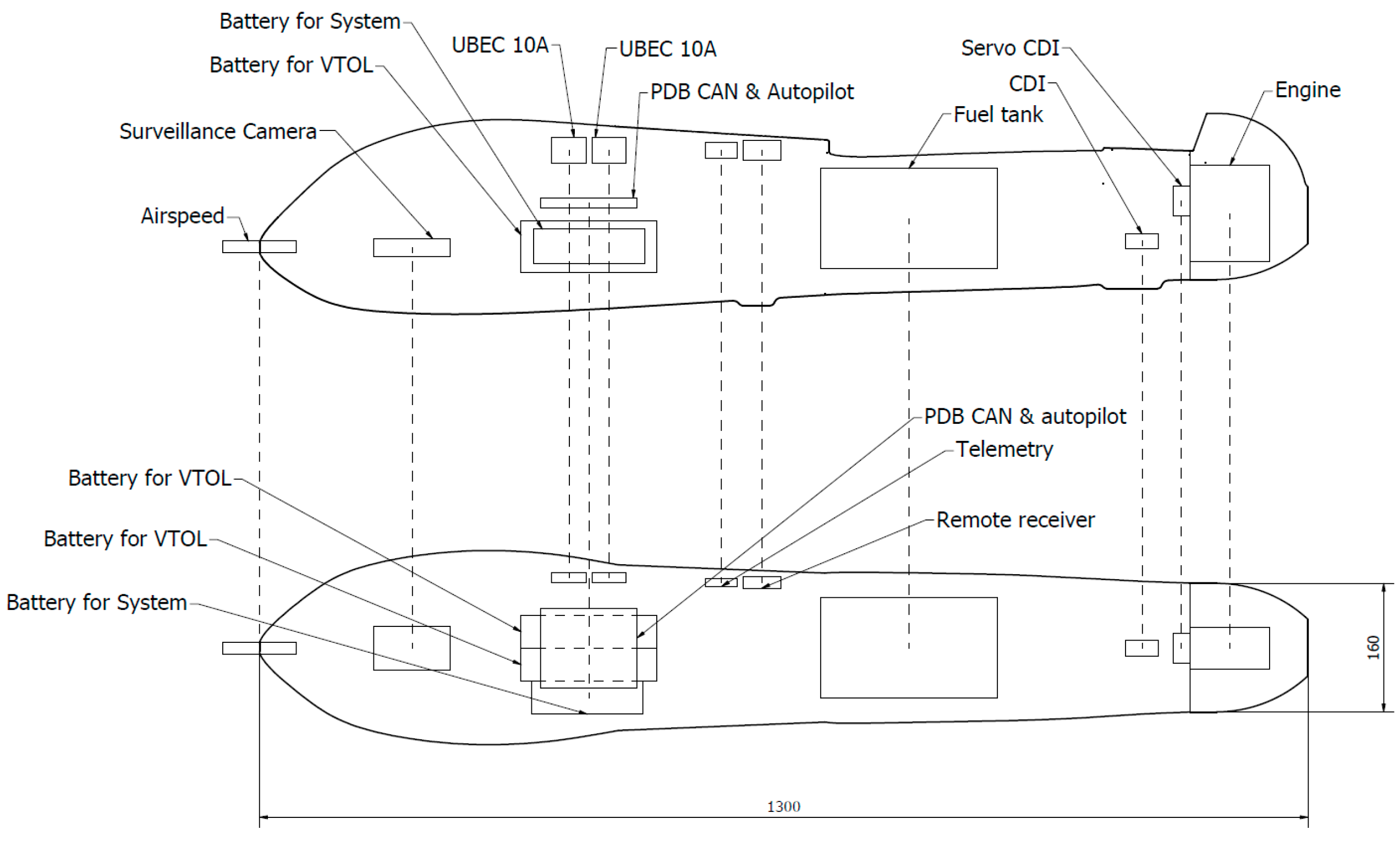
2.4.3. Fuselage Detailed Design
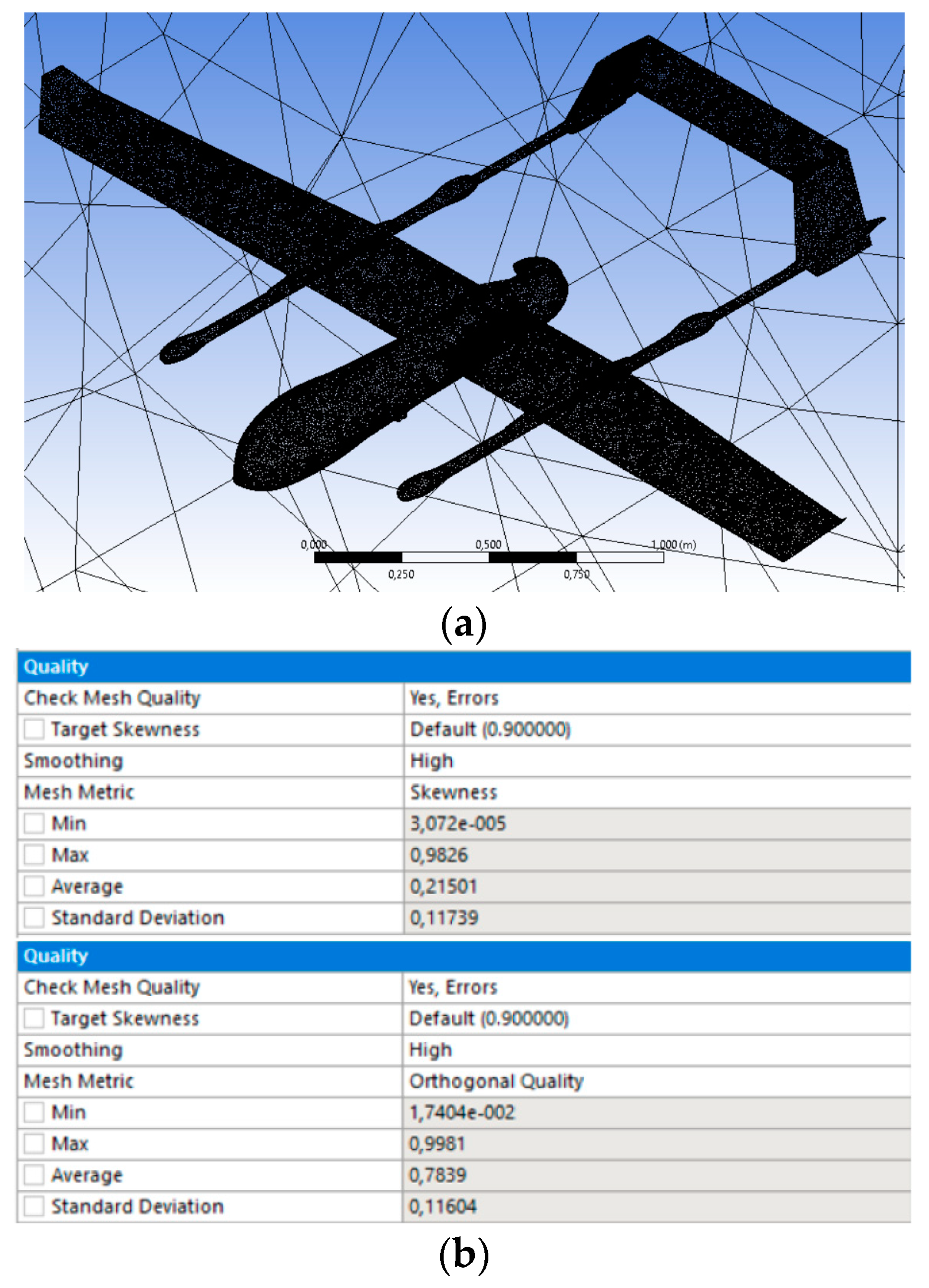
2.5. CFD Simulation
2.5.1. Simulation Parameters
2.5.2. Simulation Setup
3. Results
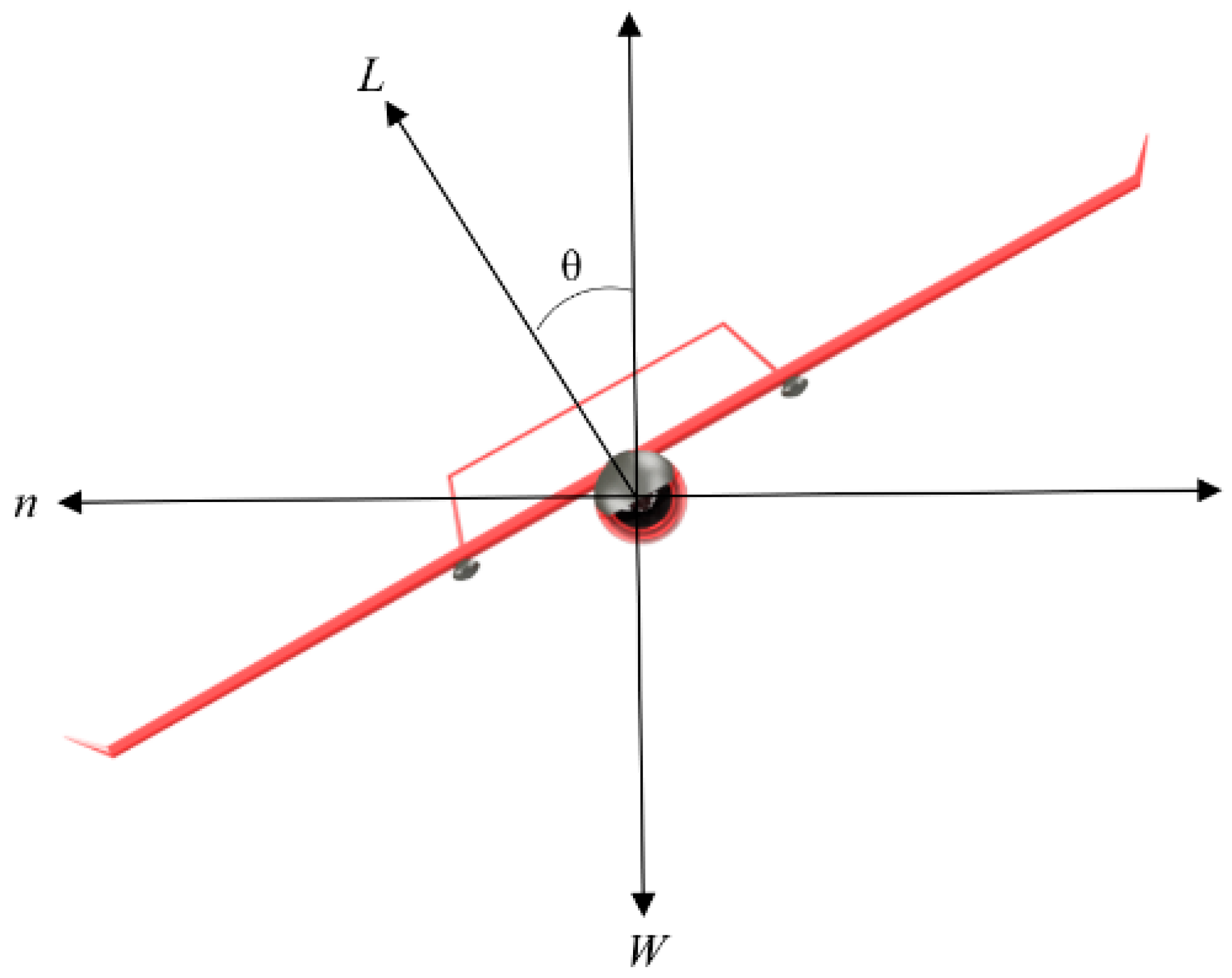
3.1. Aerodynamic Parameters
- CL = Coefficient of lift
- CD = Coefficient of drag
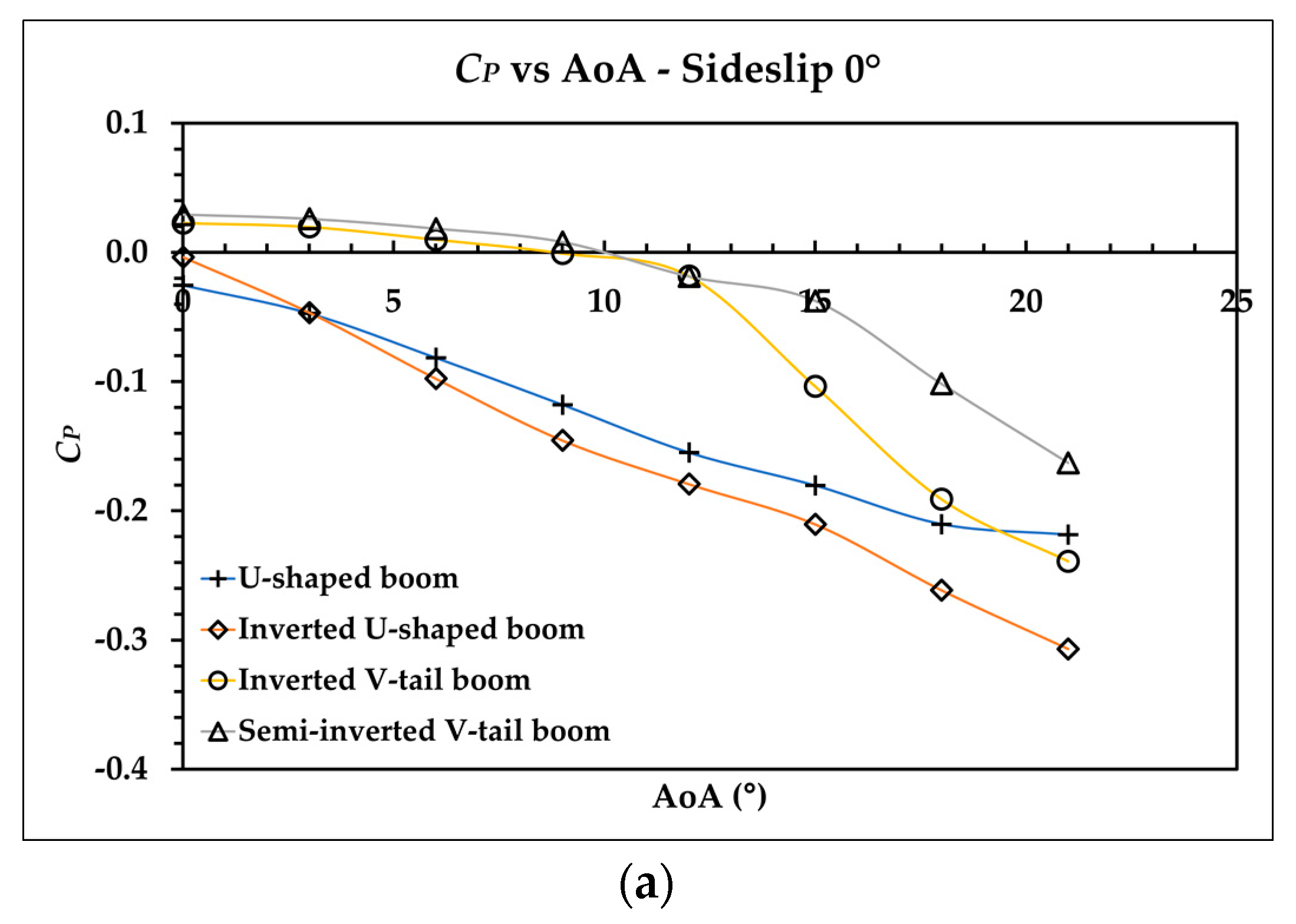
- CP = Coefficient of pitch
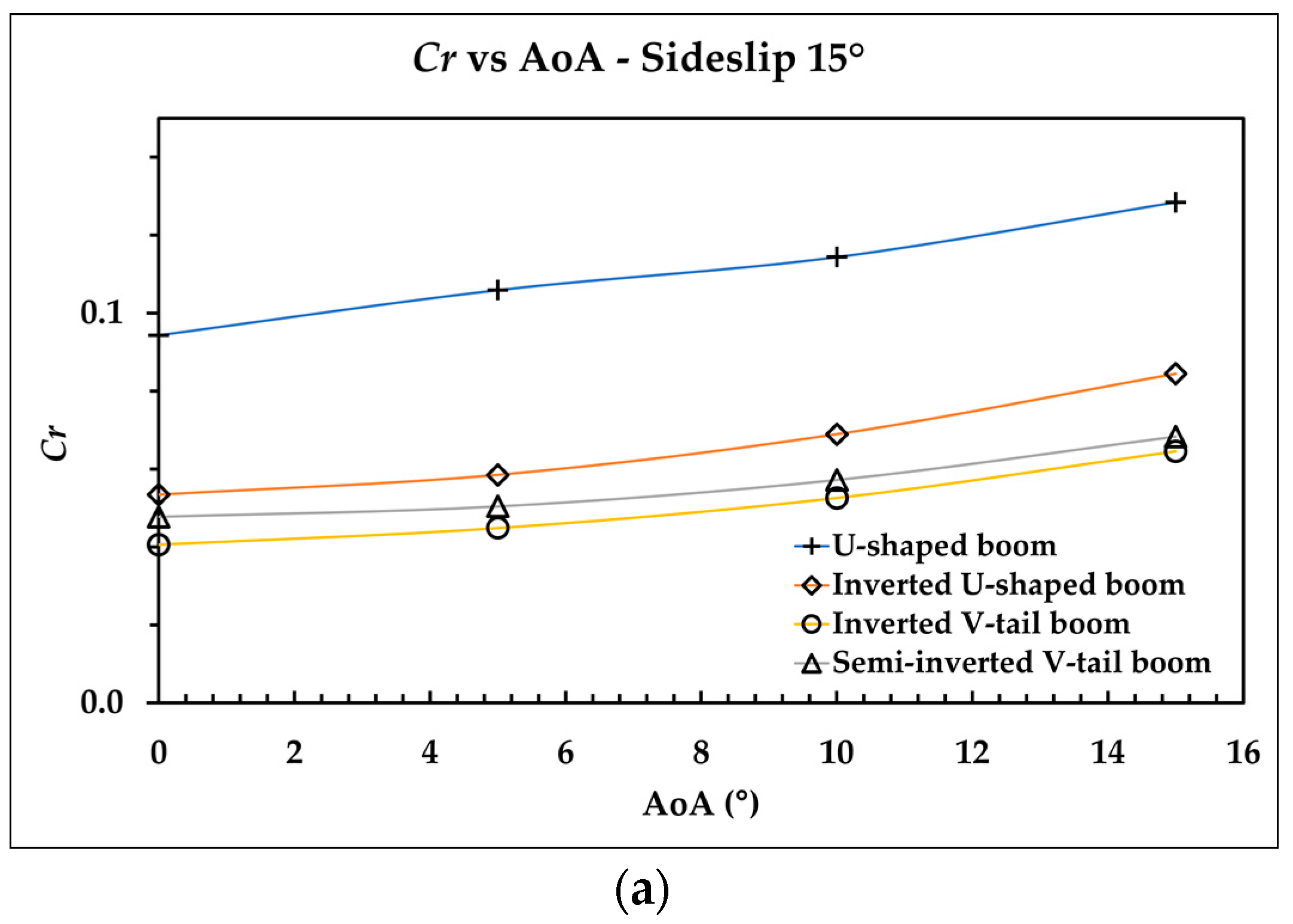
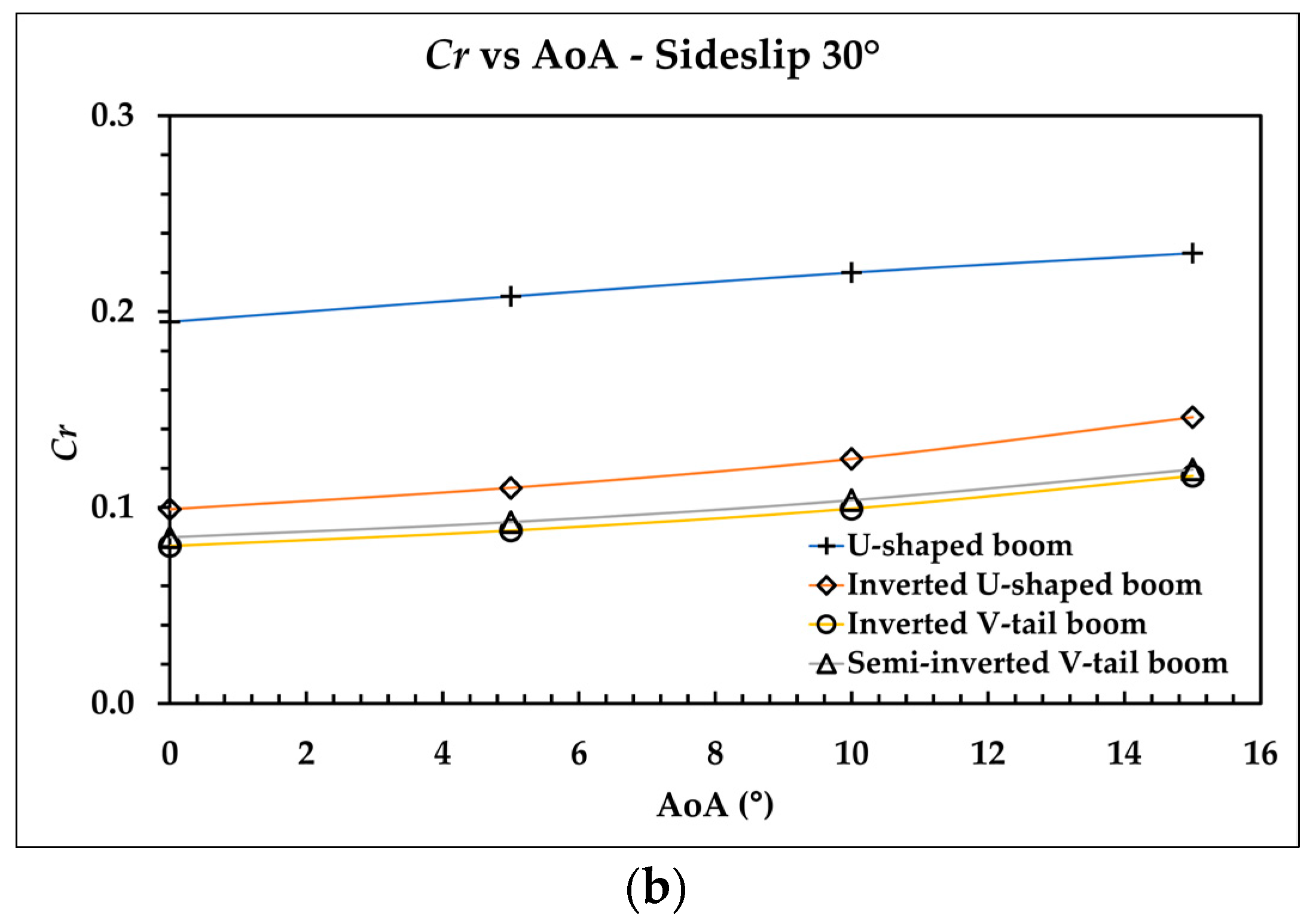
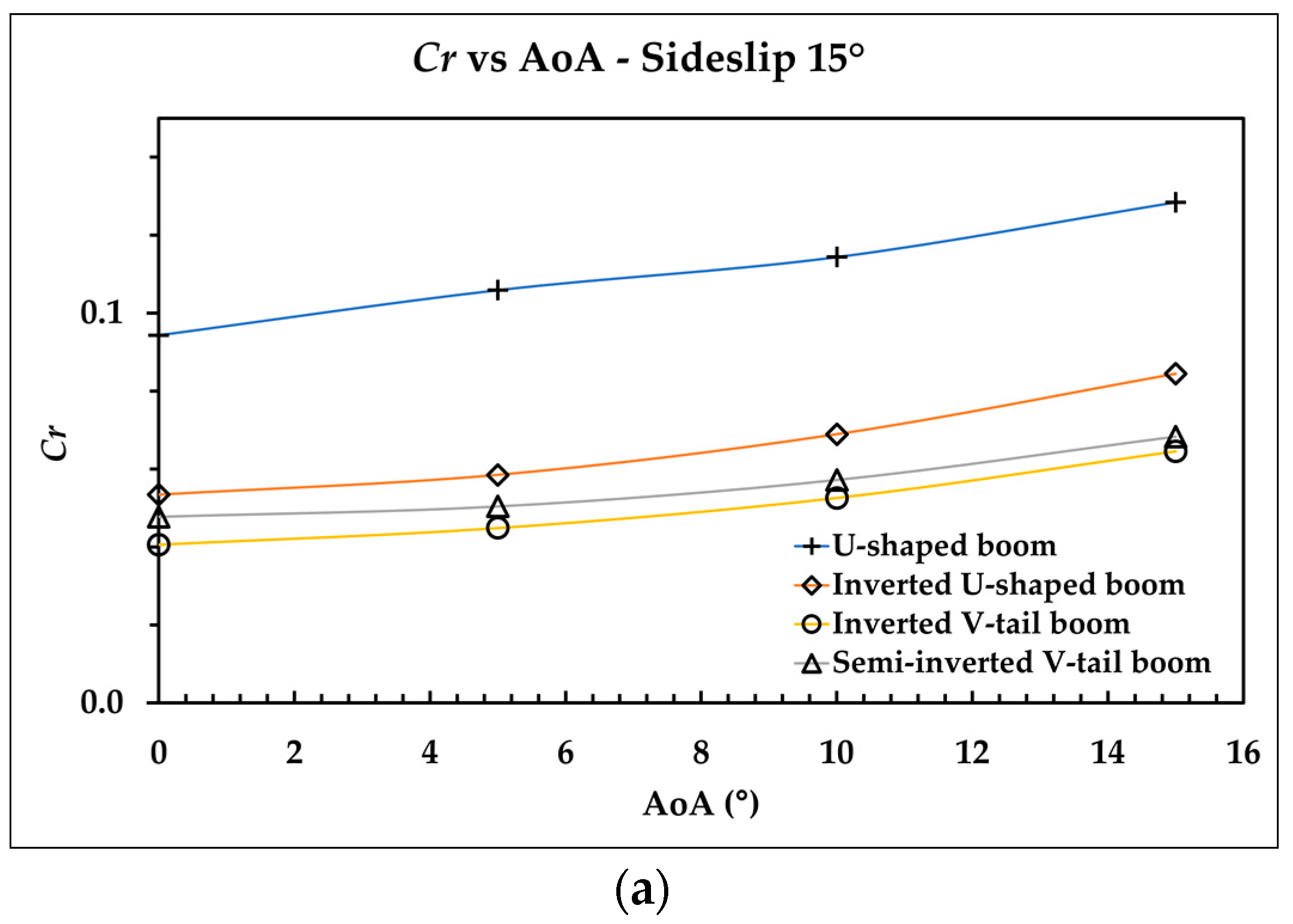
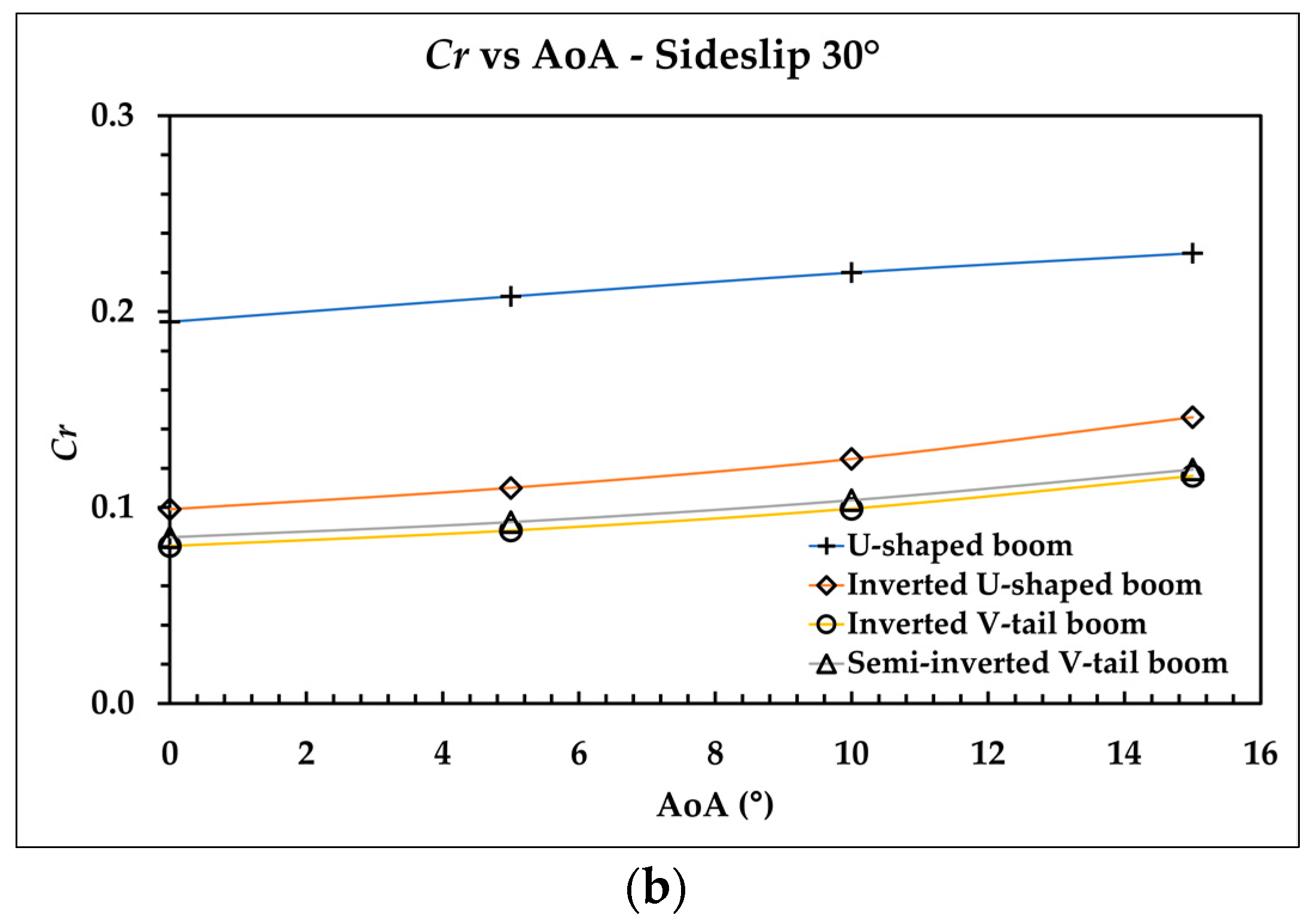
- Cr = Coefficient of roll
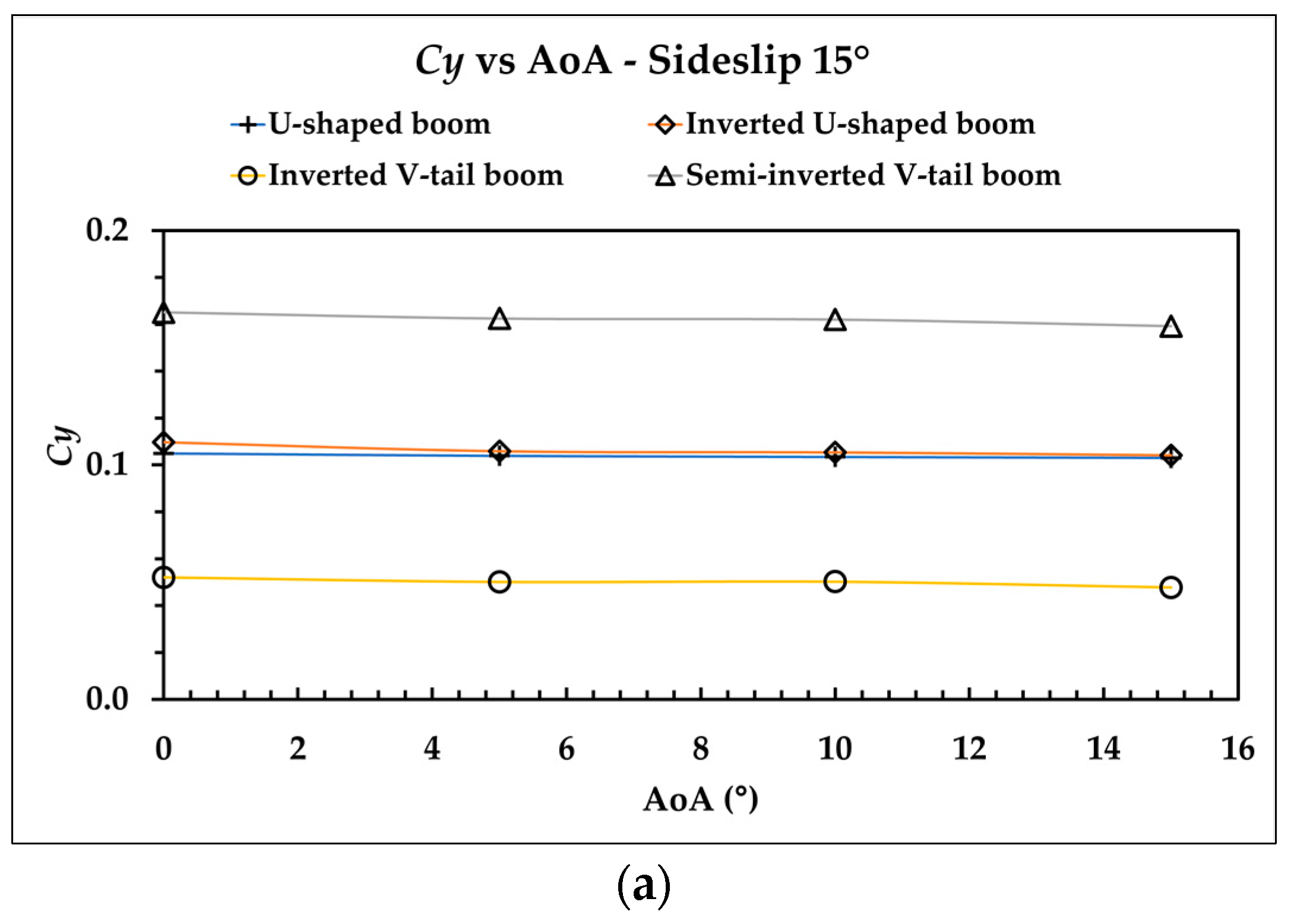
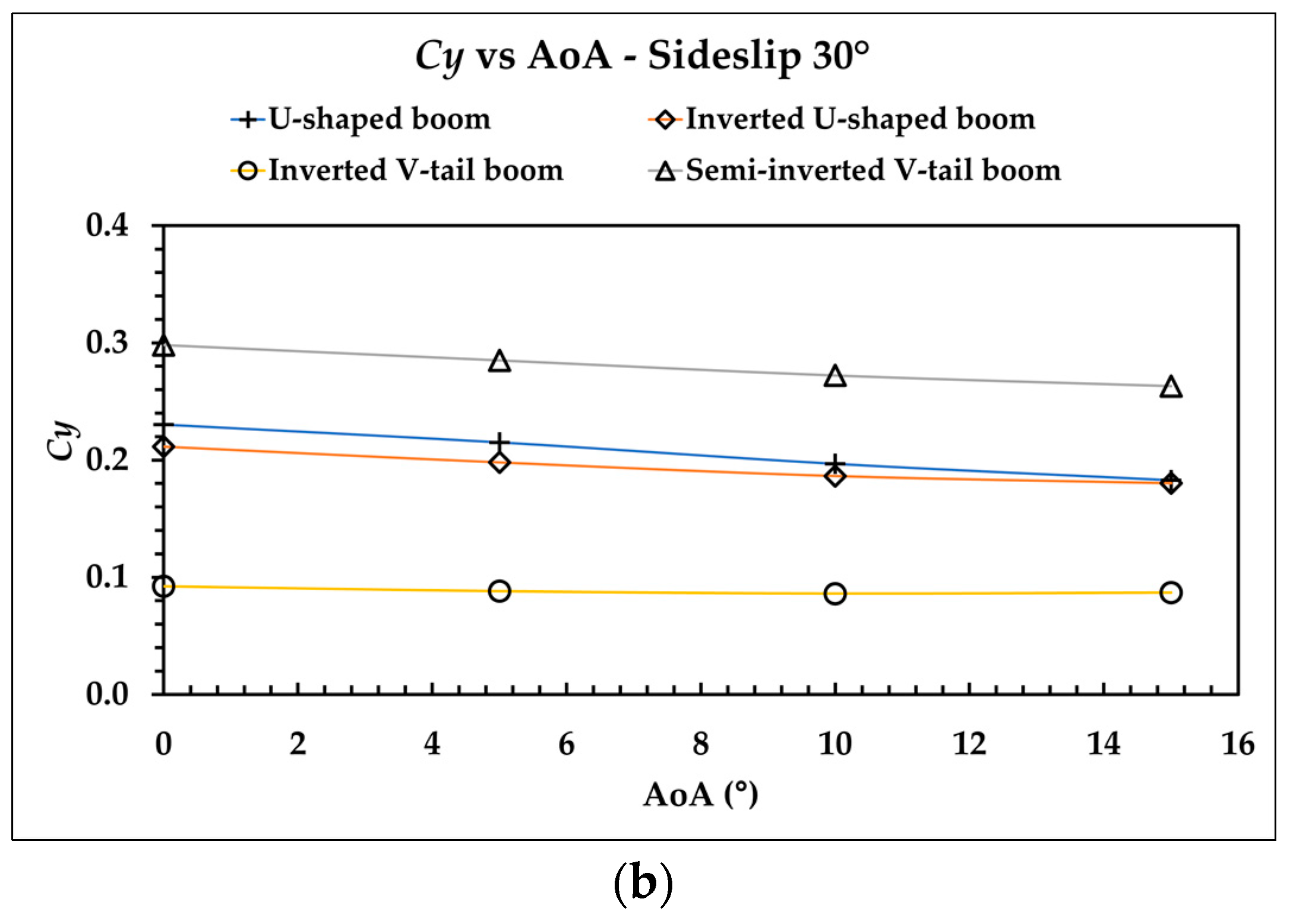
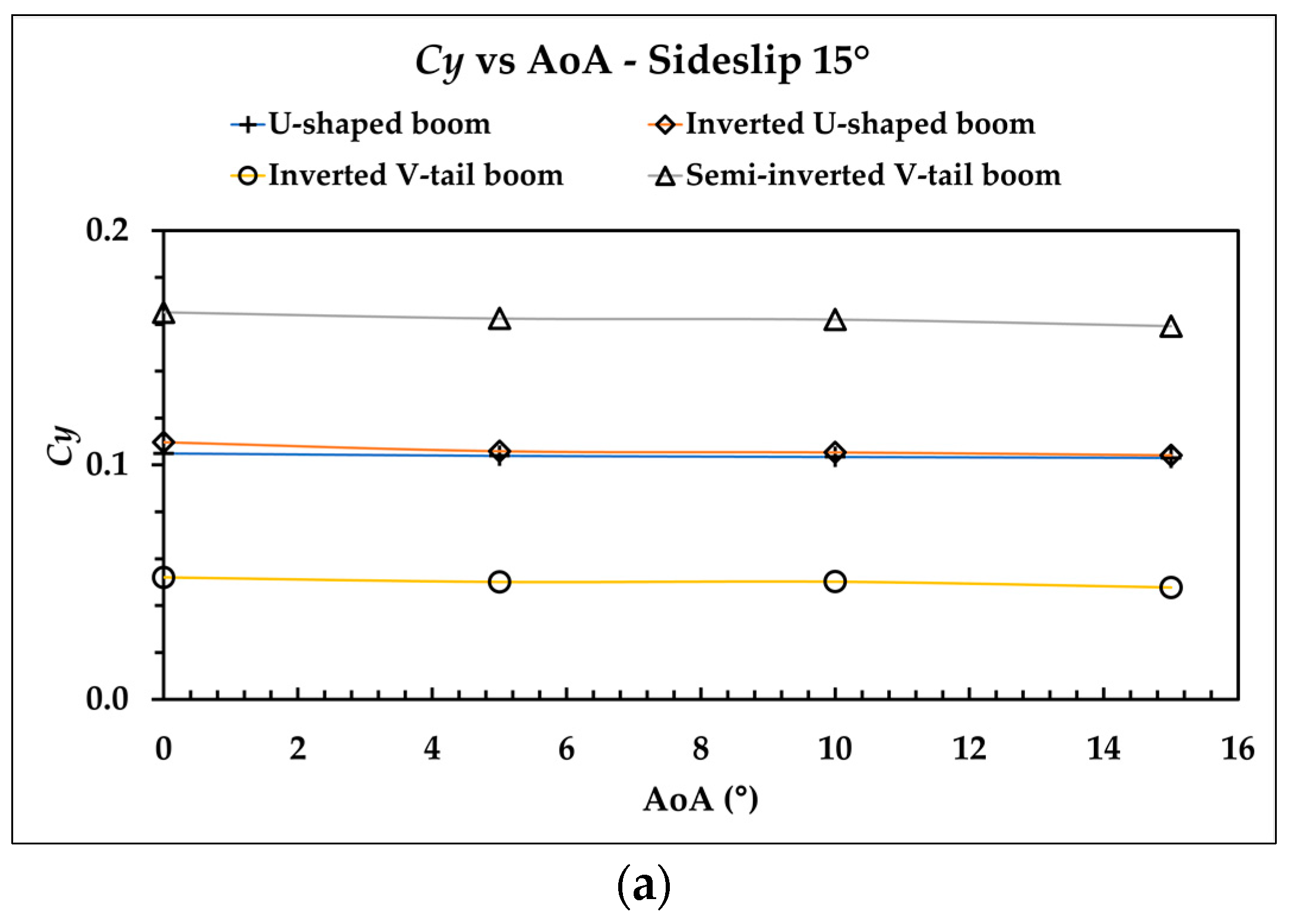
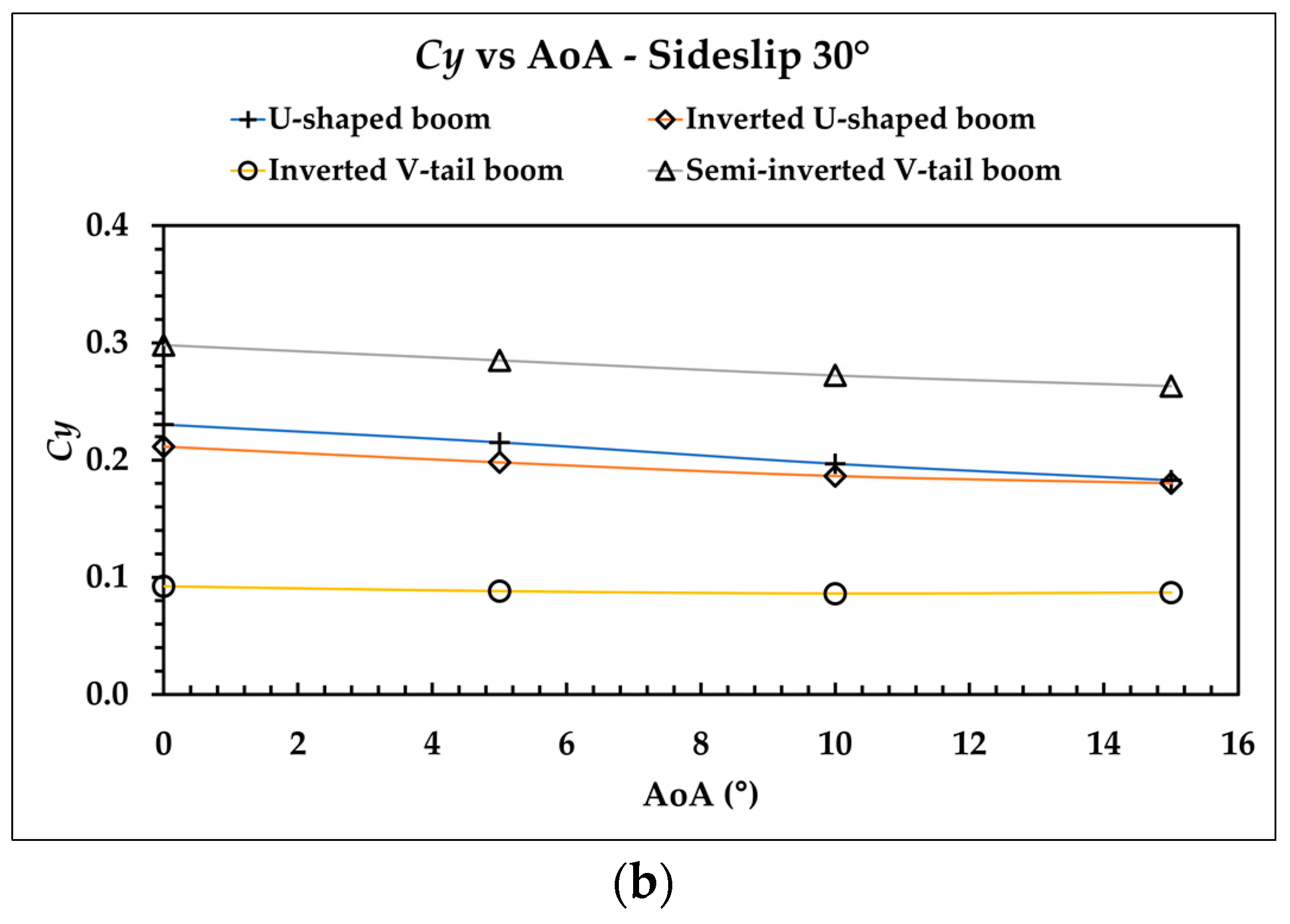
- Cy = Coefficient of yaw
- FL = Lift force (N)
- FD = Drag force (N)
- MP = Pitch moment (Nm)
- Mr = Roll moment (Nm)
- My = Yaw moment (Nm)
- V = Aircraft velocity (m/s)
- A = Cross-sectional area (m2)
- C = Mean aerodynamic chord (m)
- m = Mass (kg)
- a = Acceleration (m/s2)
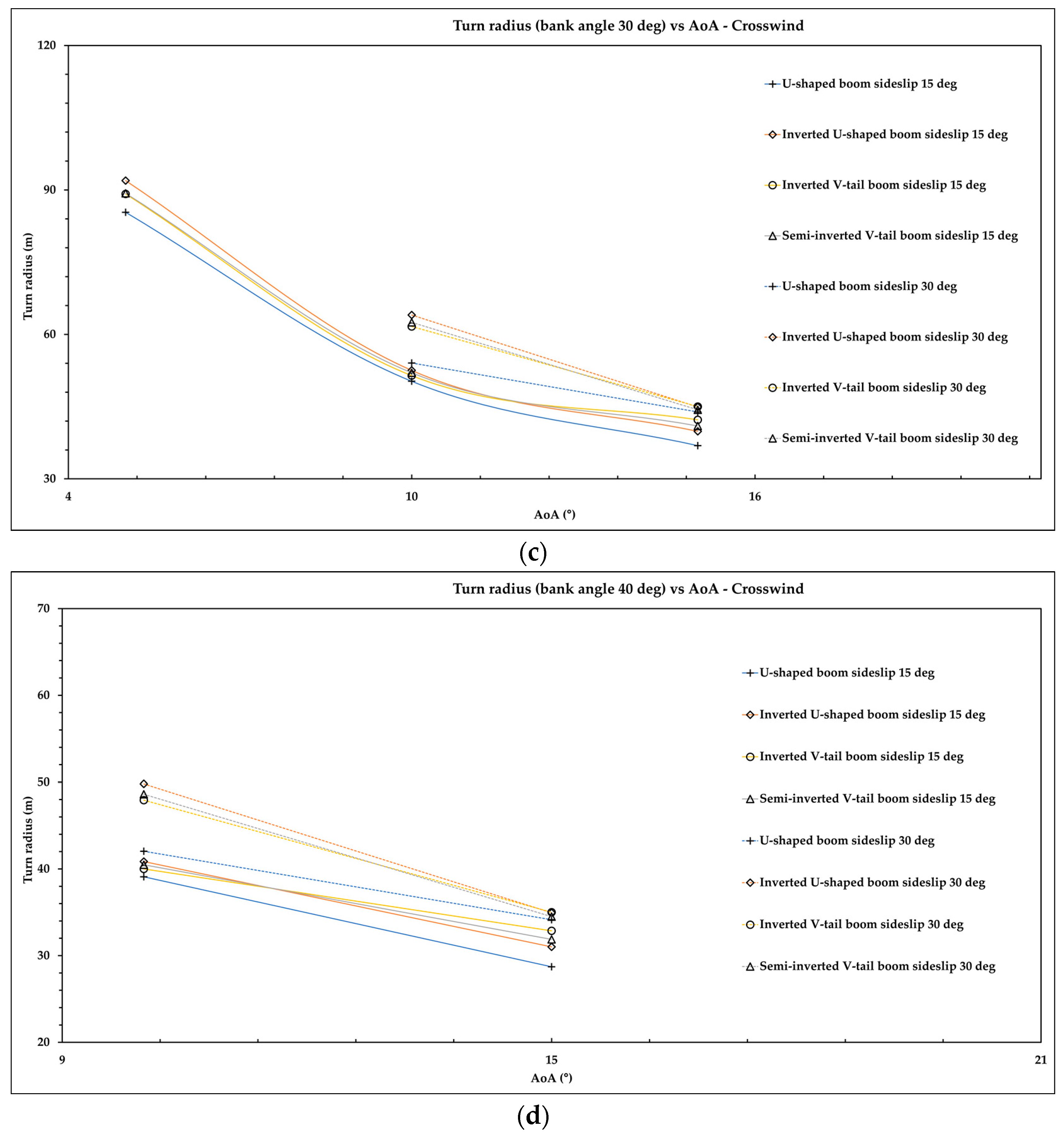
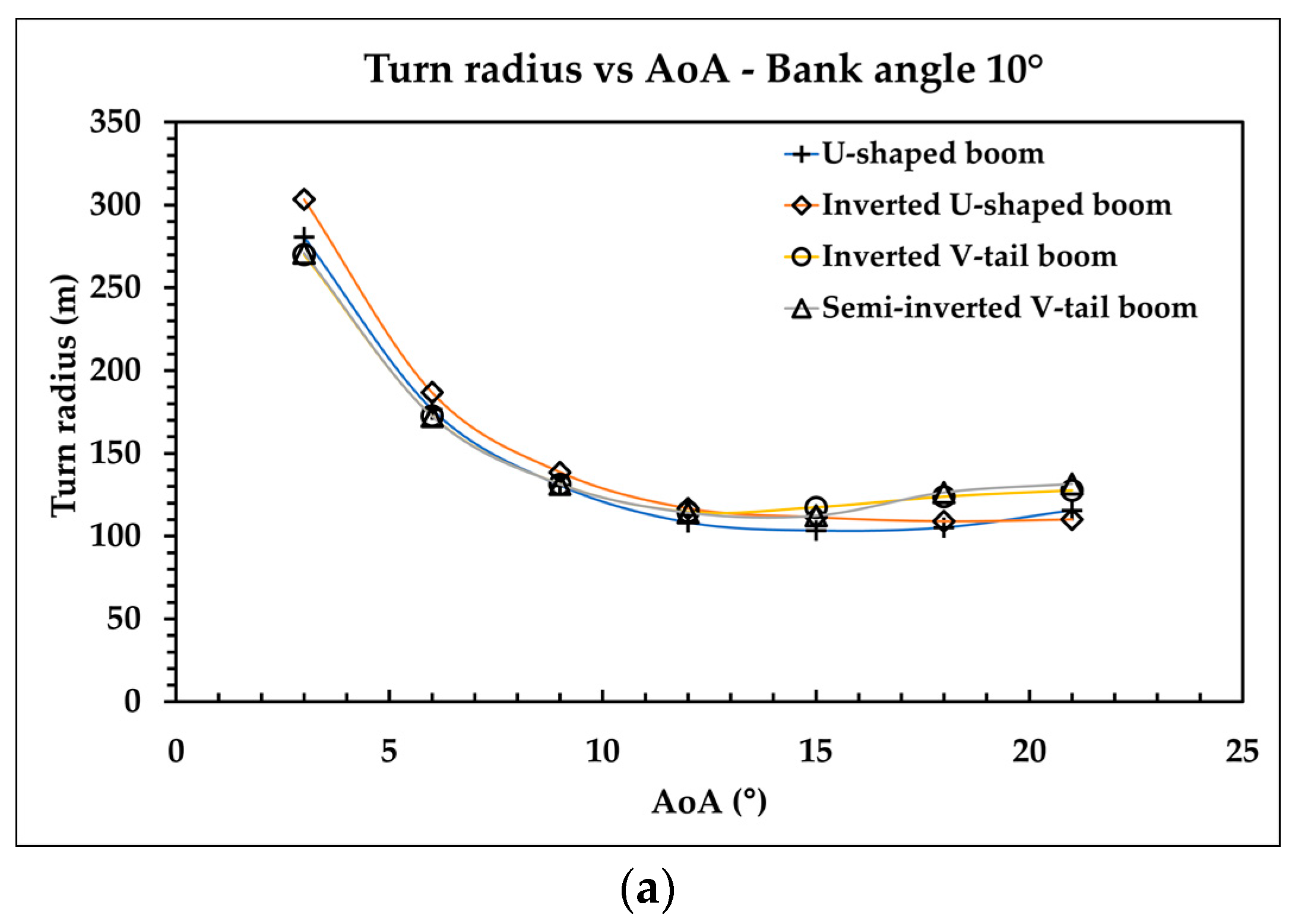
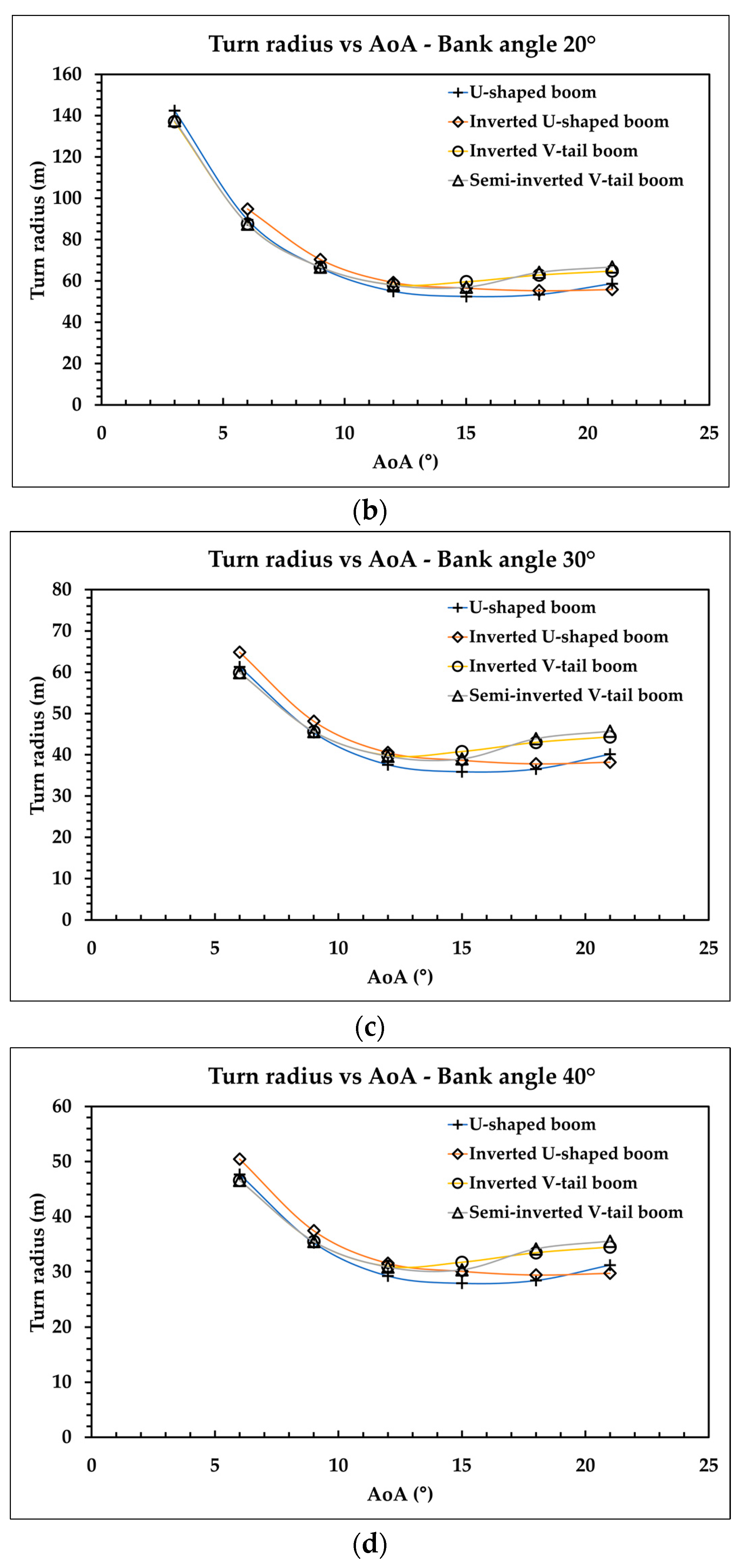
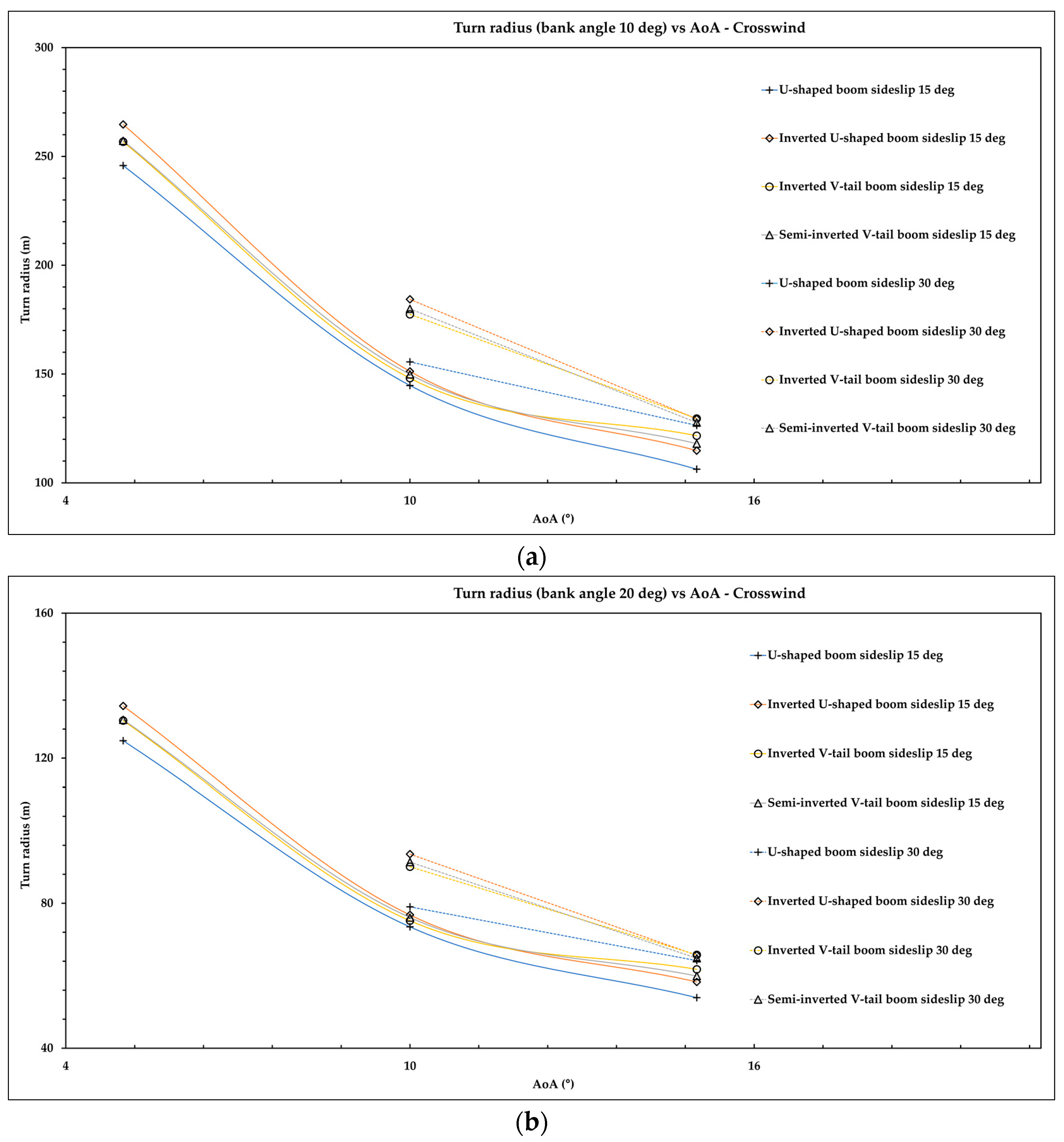
- r = Turn radius (m)
- g = Gravity (m/s2)
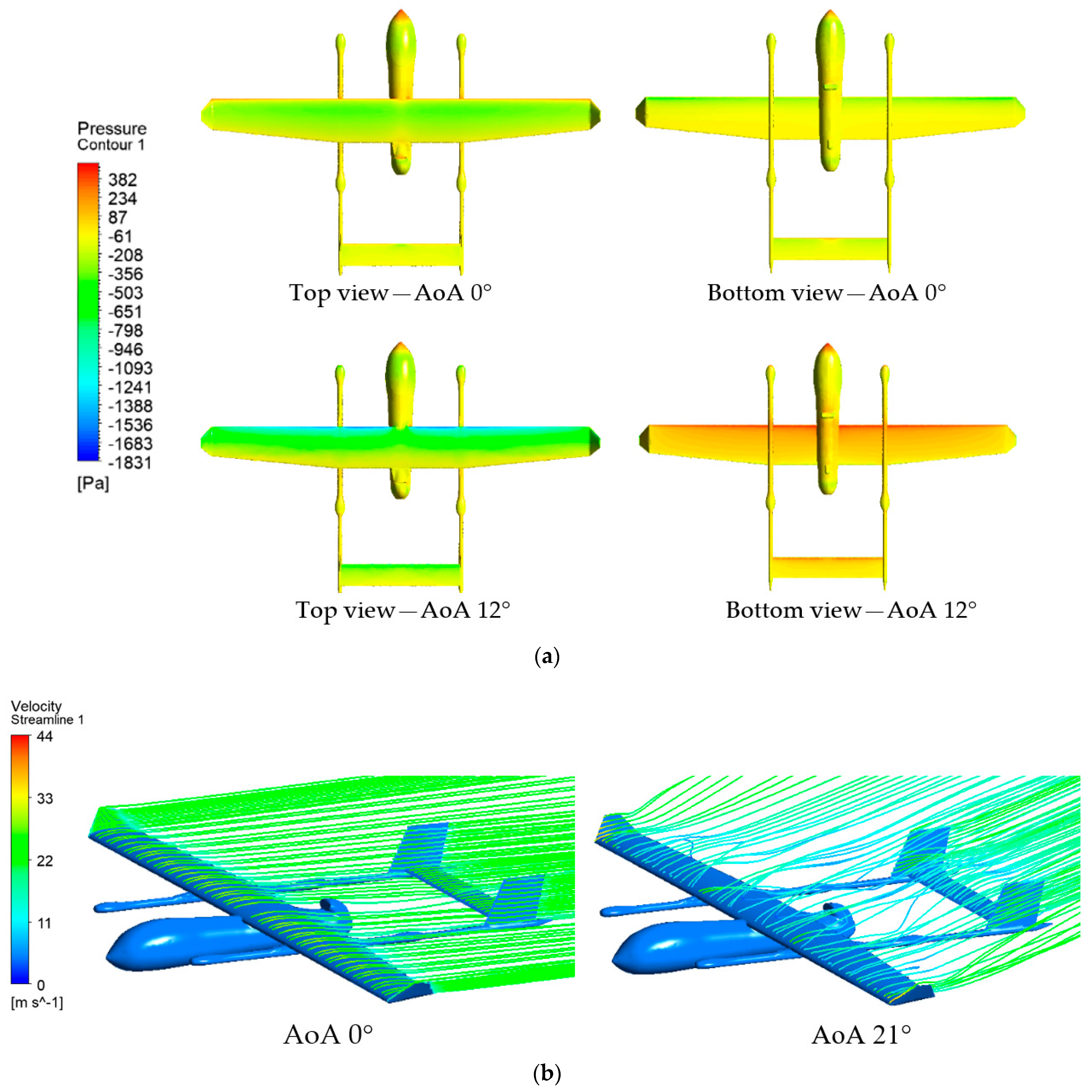
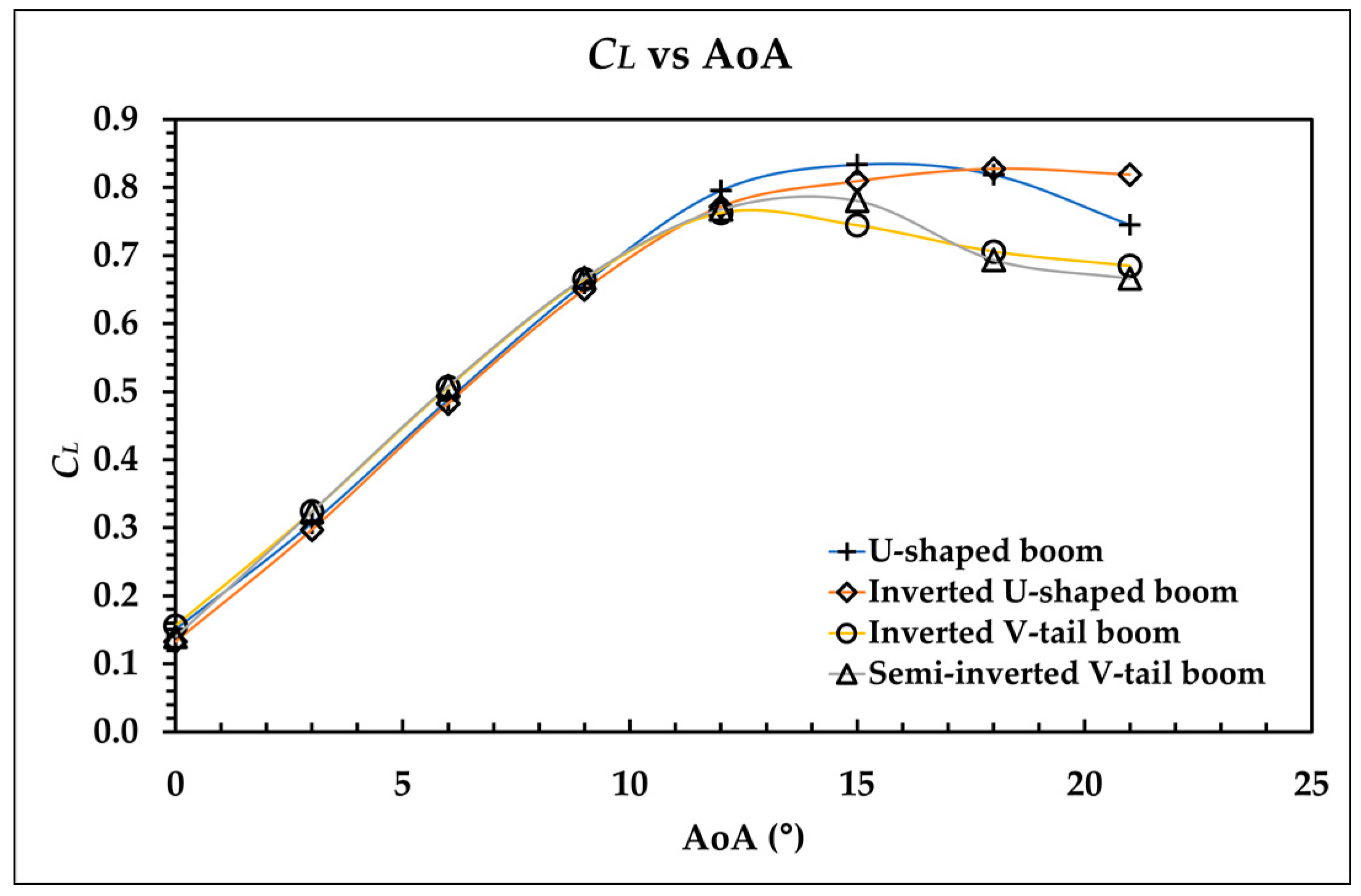
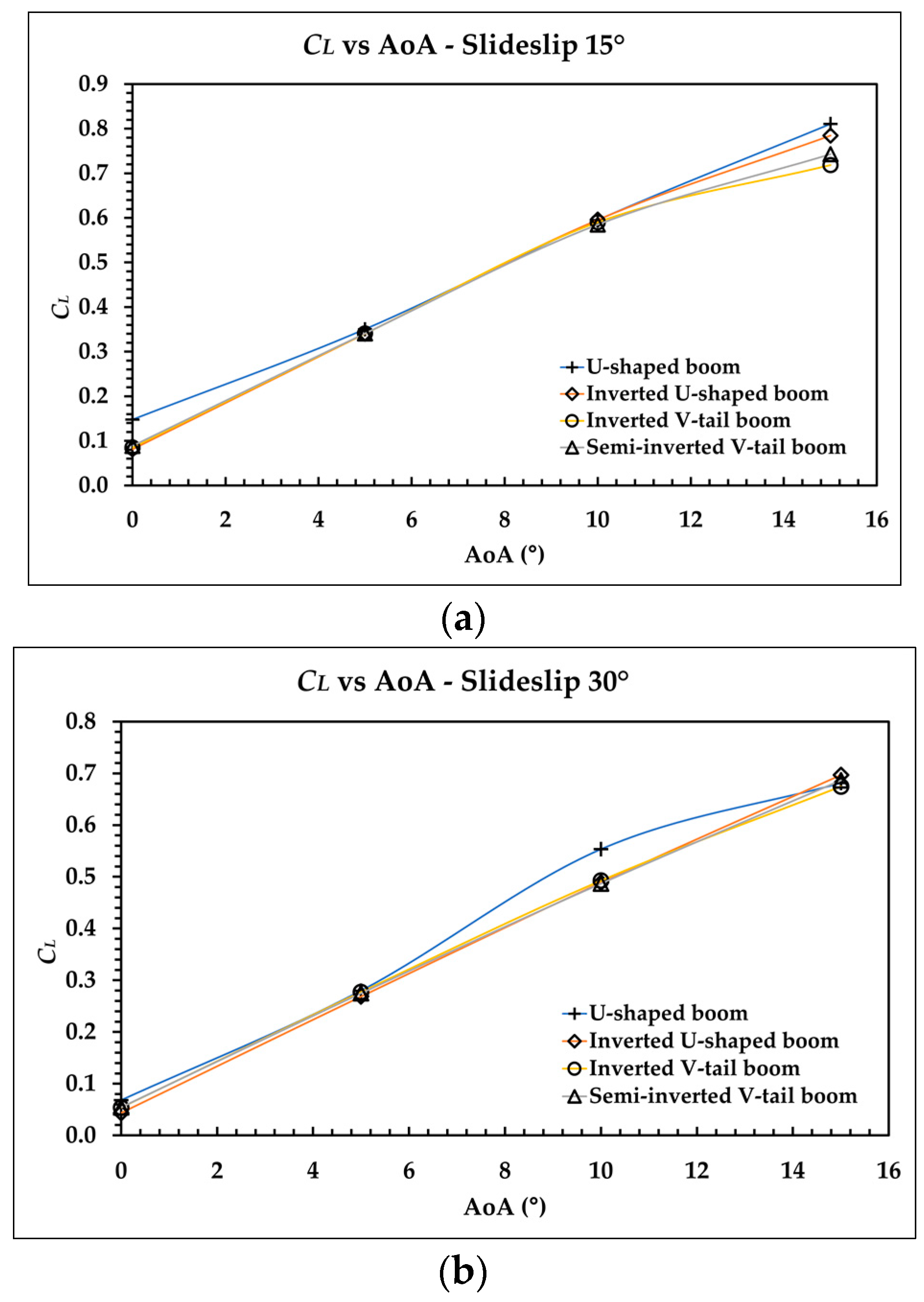
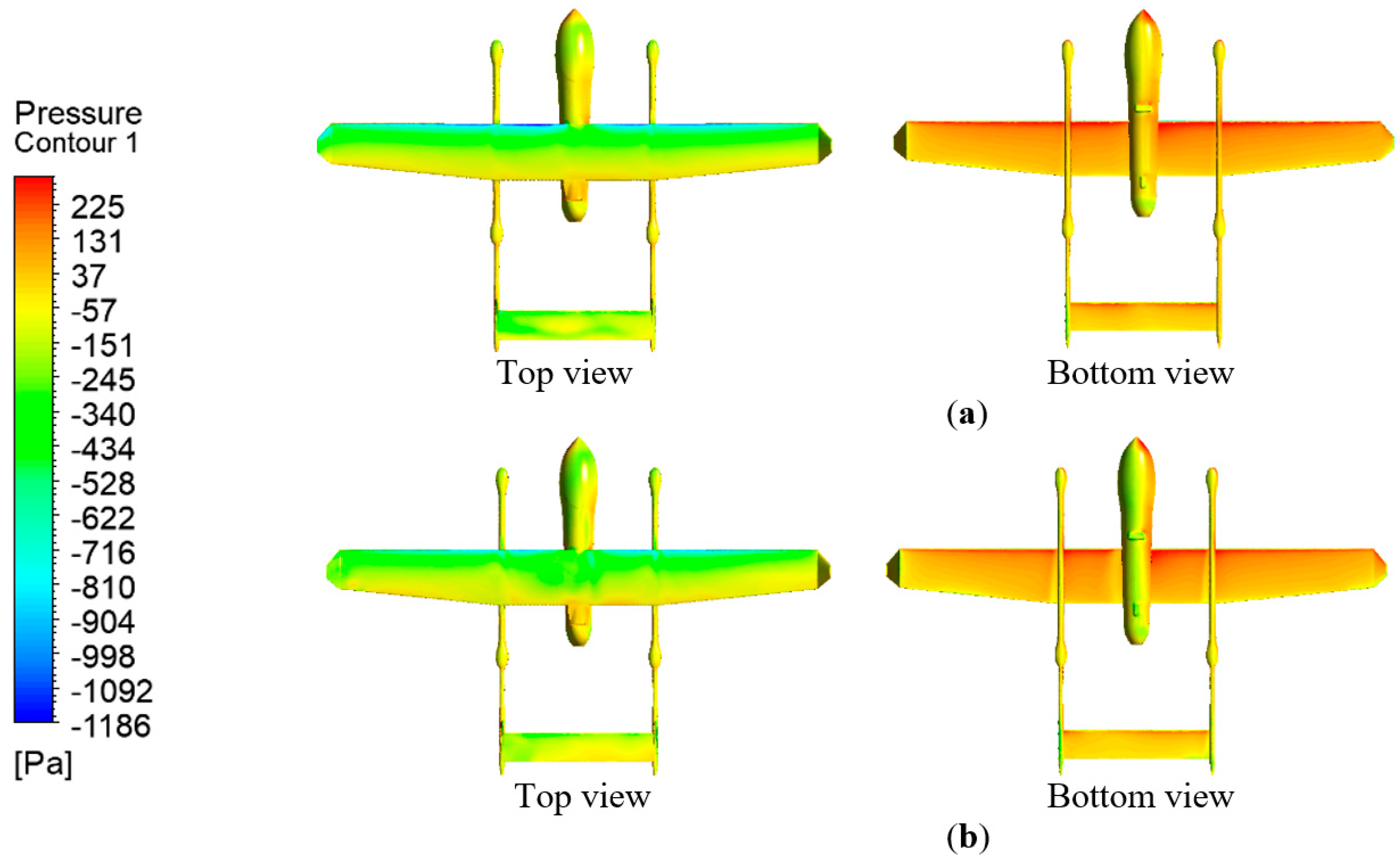
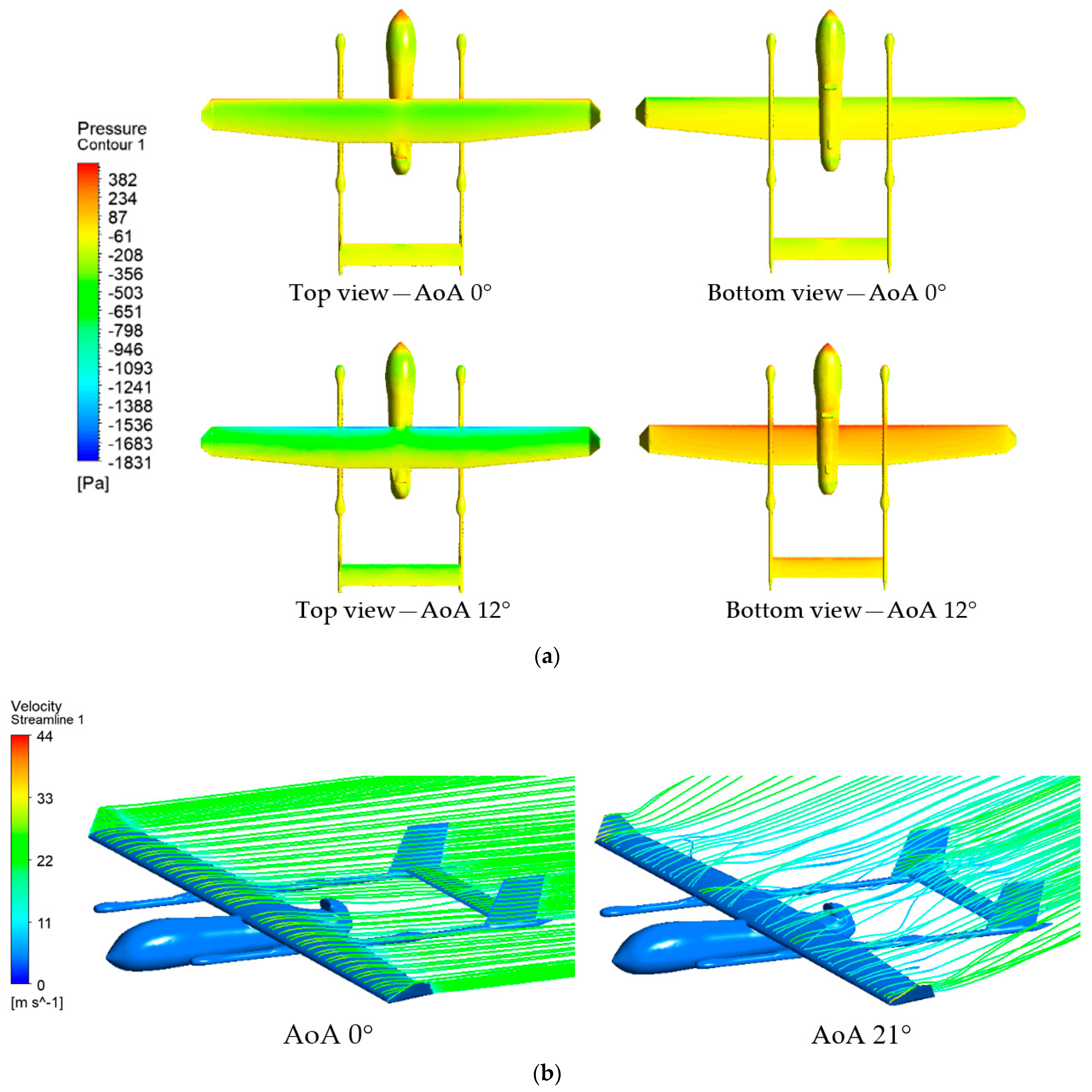
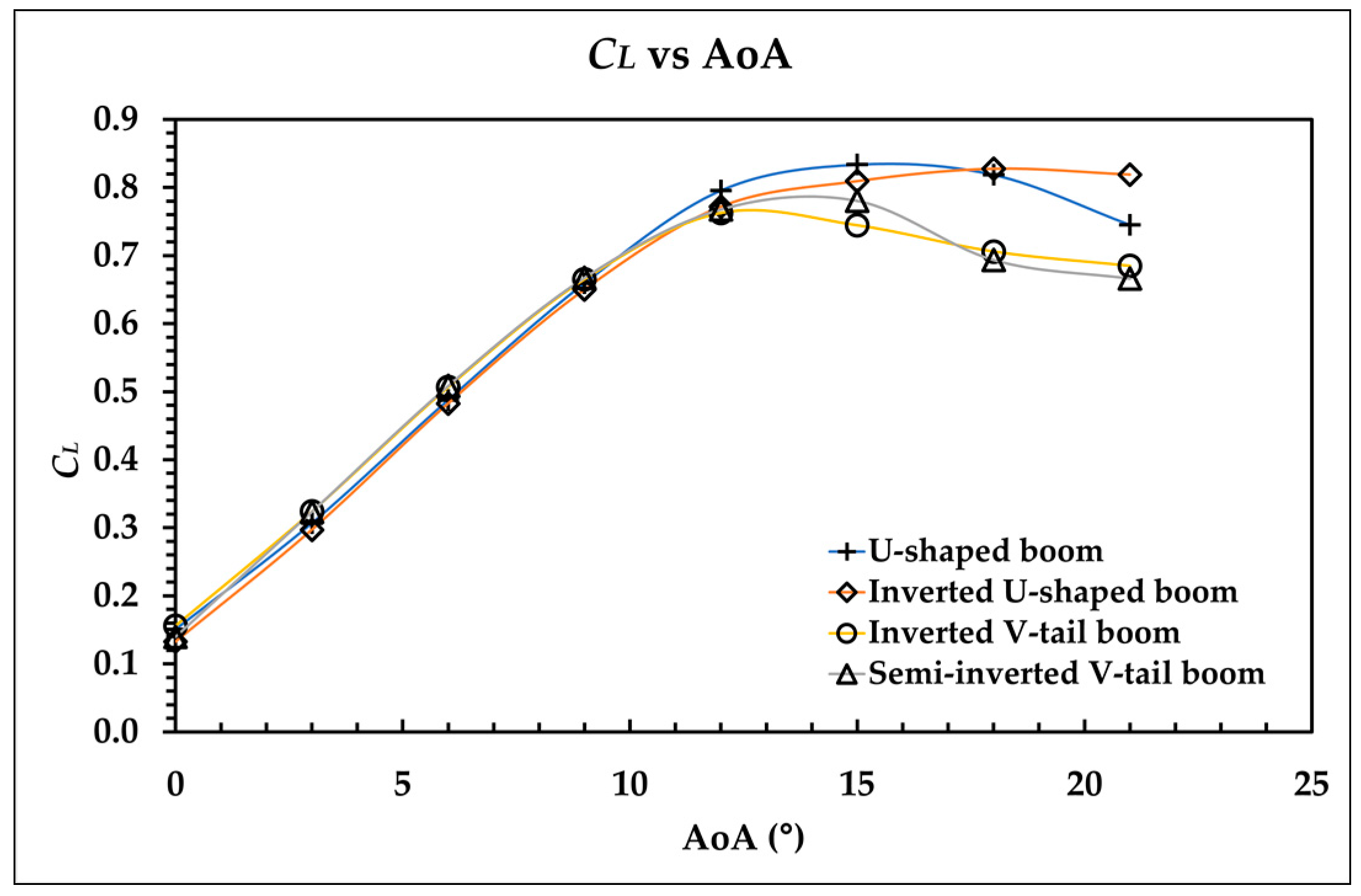
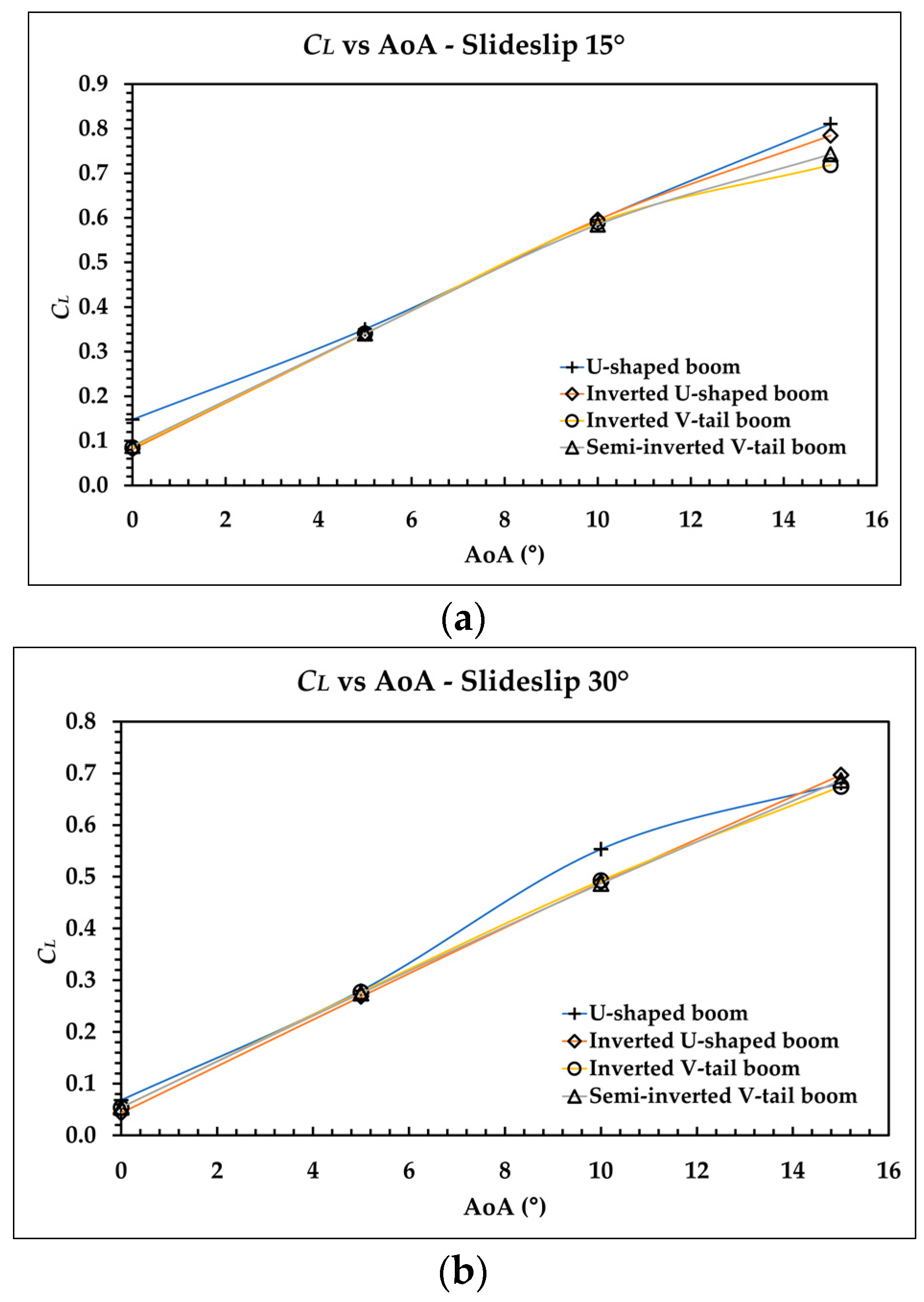
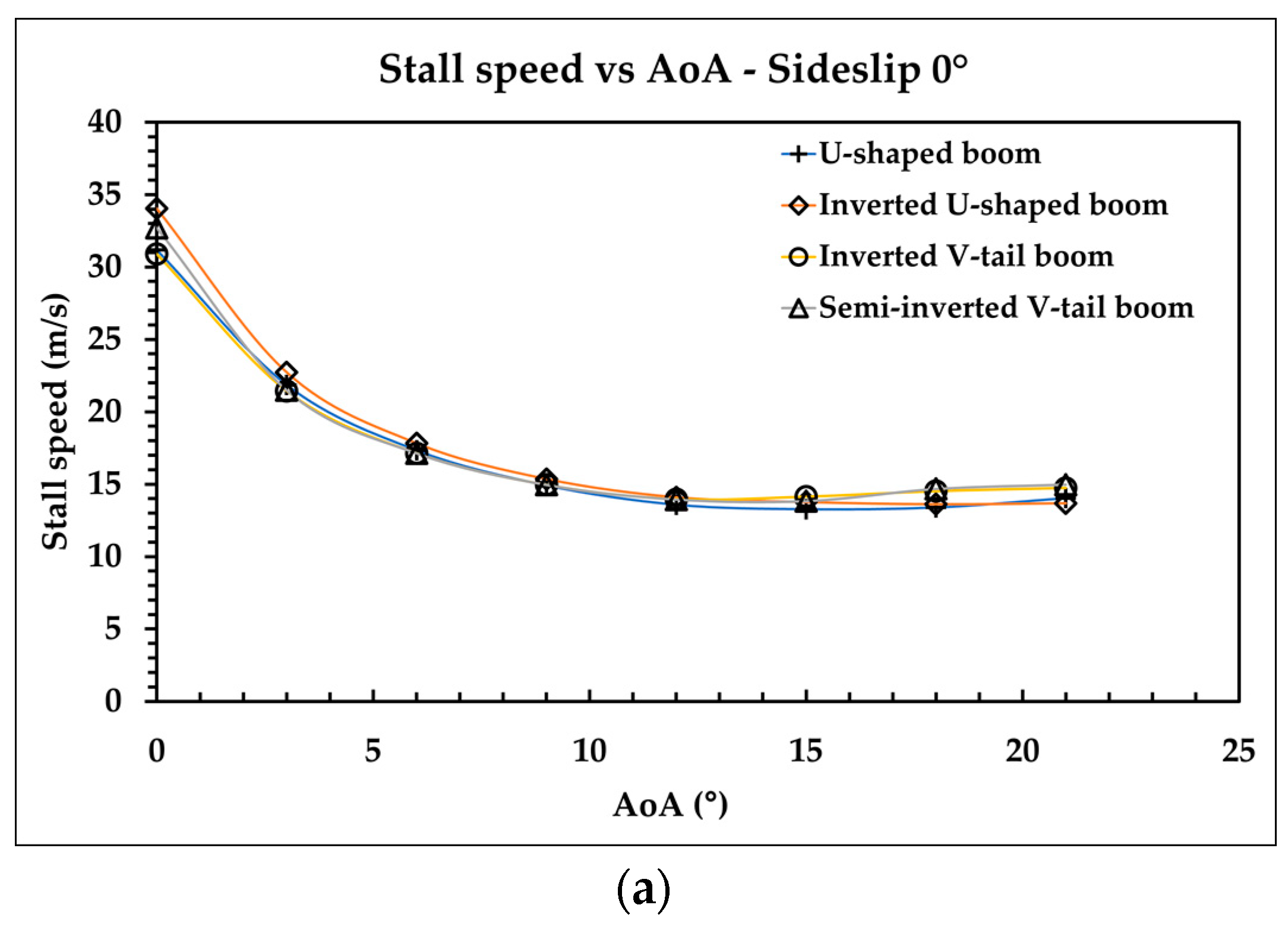
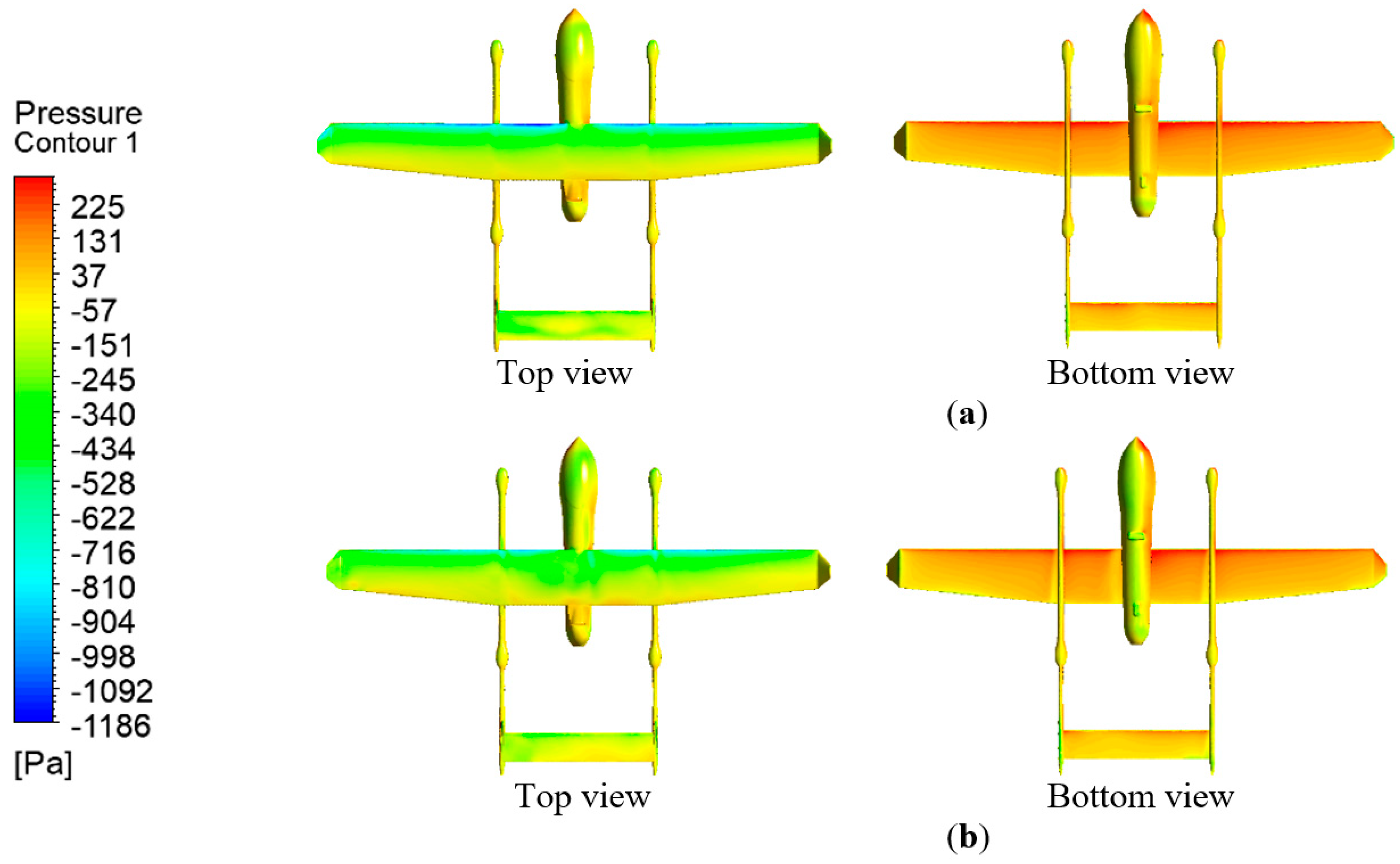
3.2. Lift, Drag, and Stall Phenomena
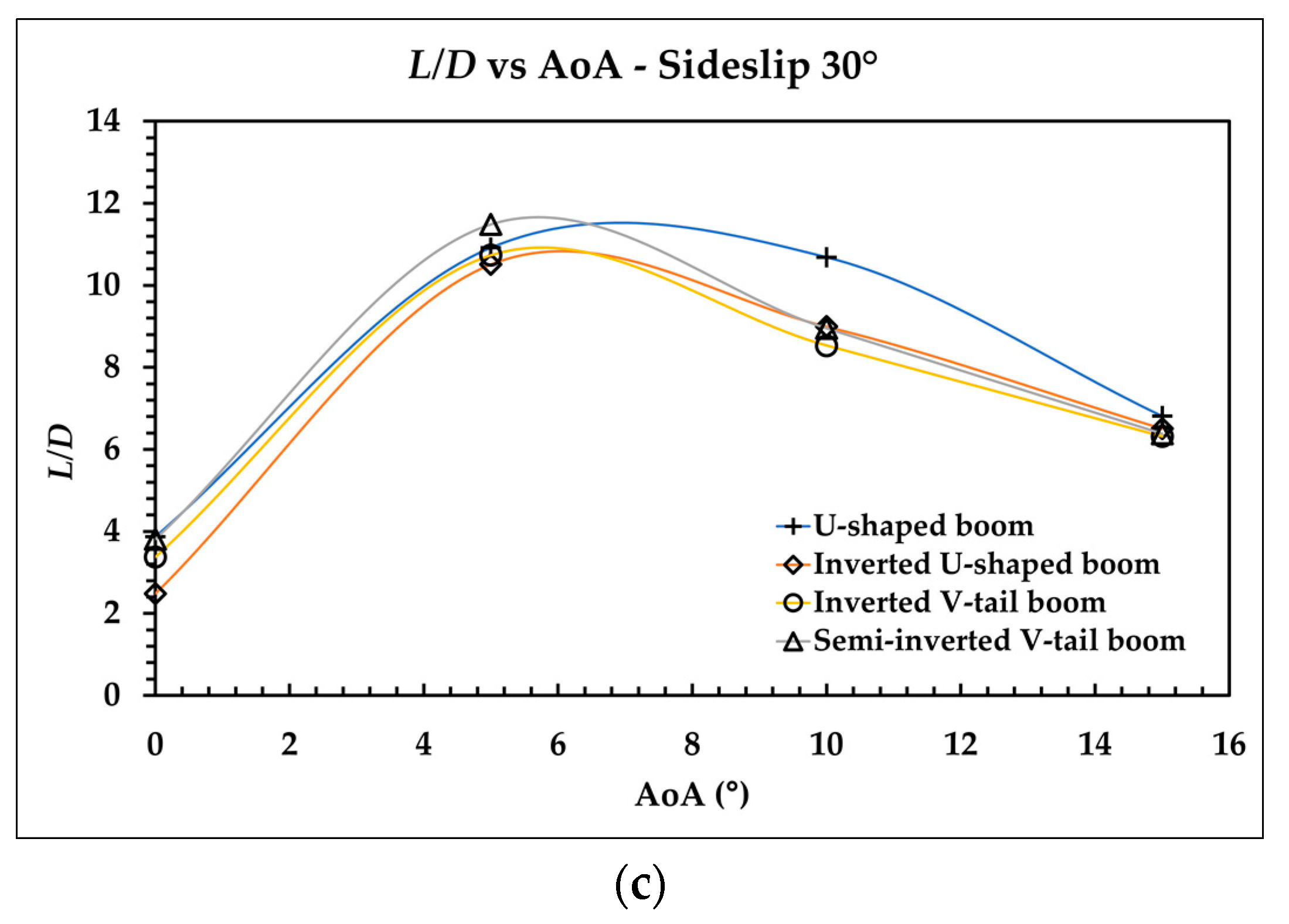
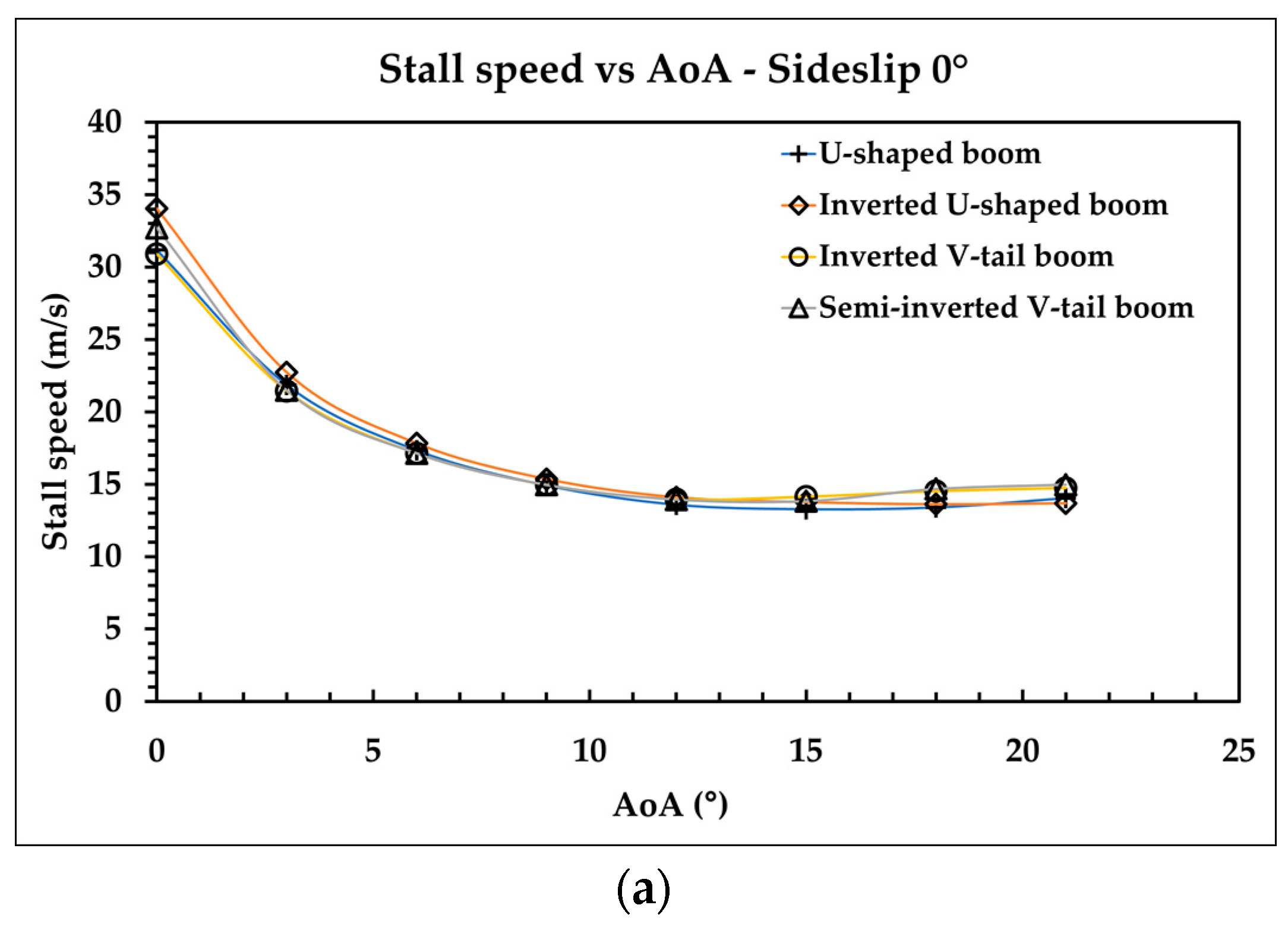
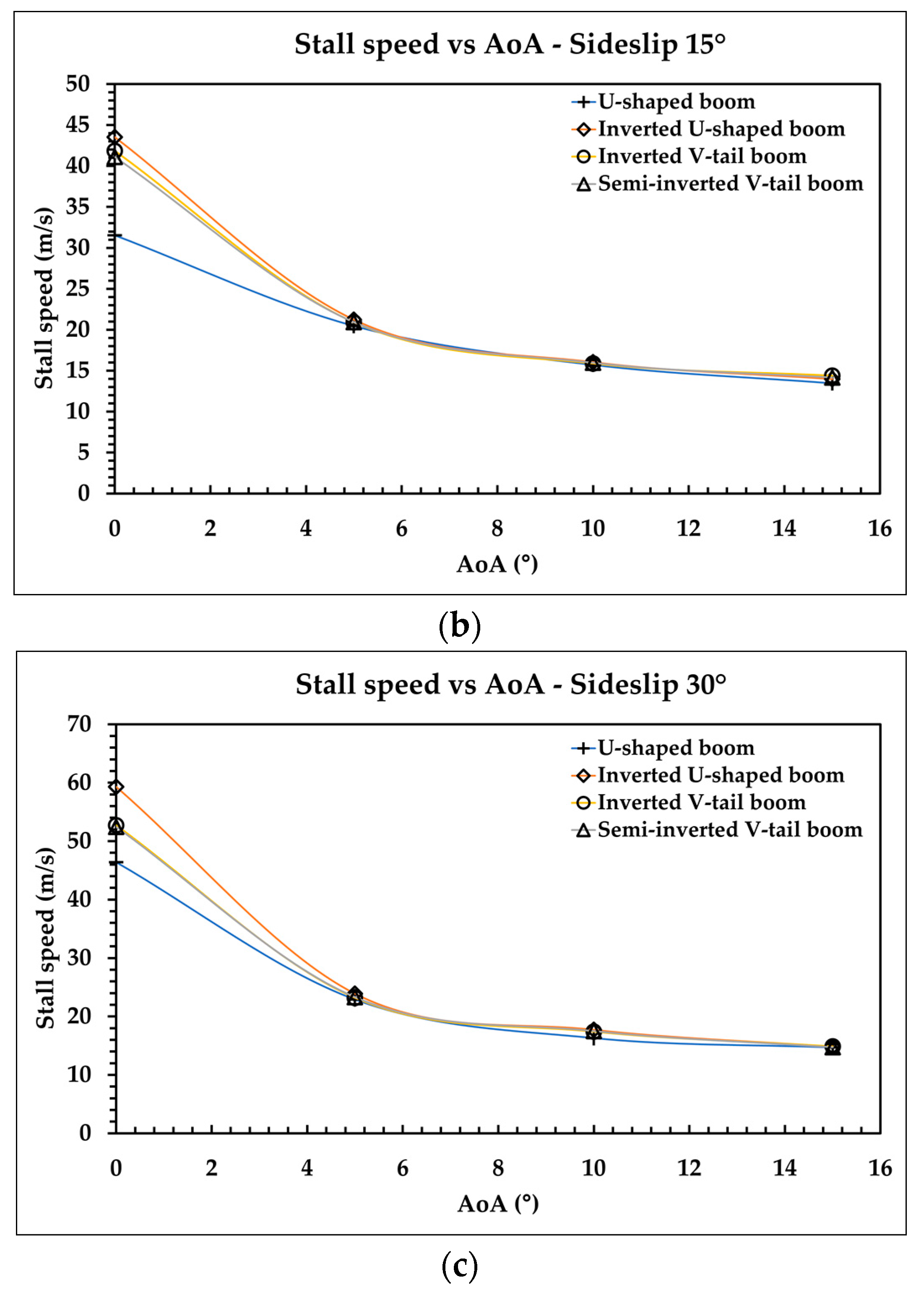
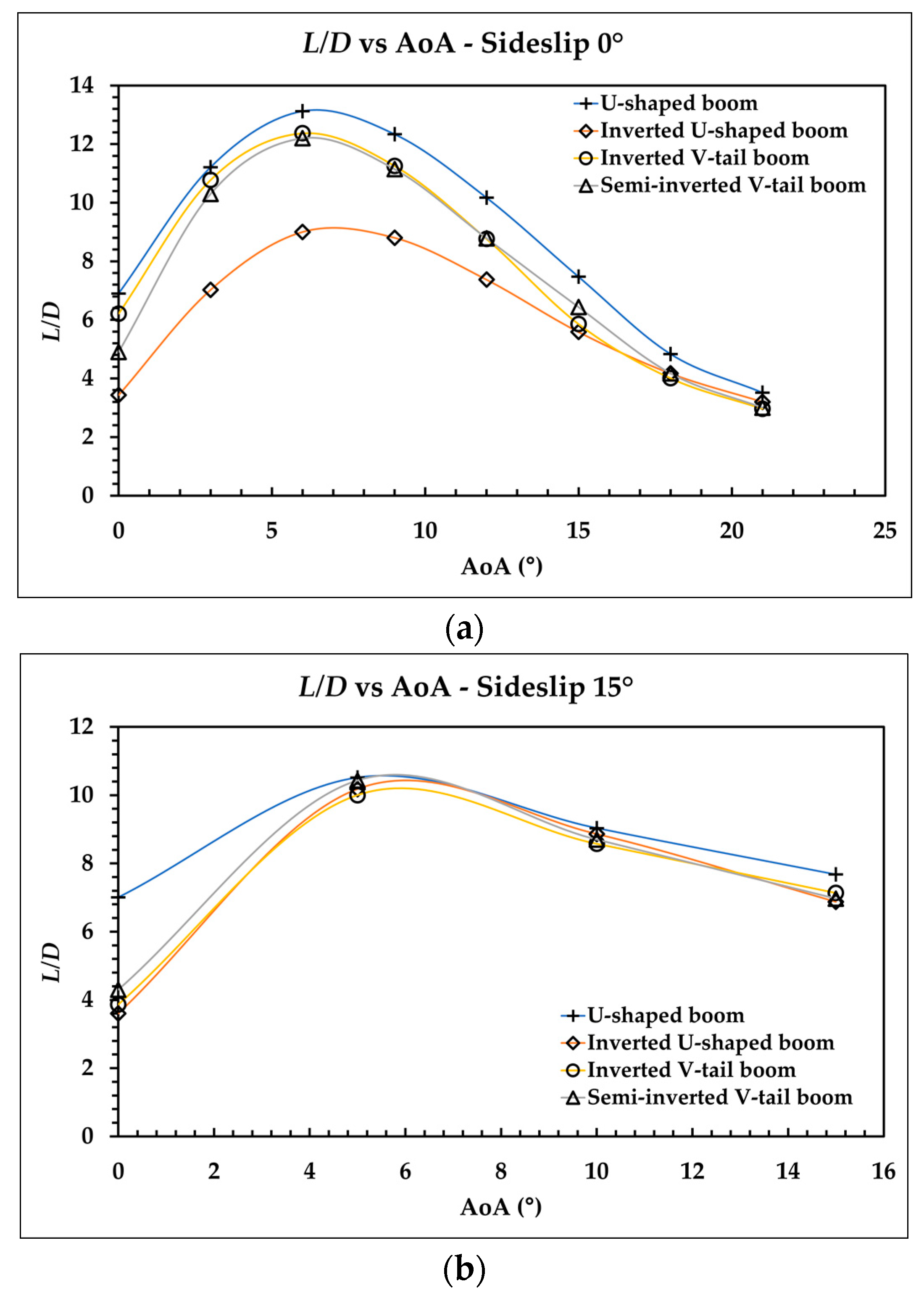
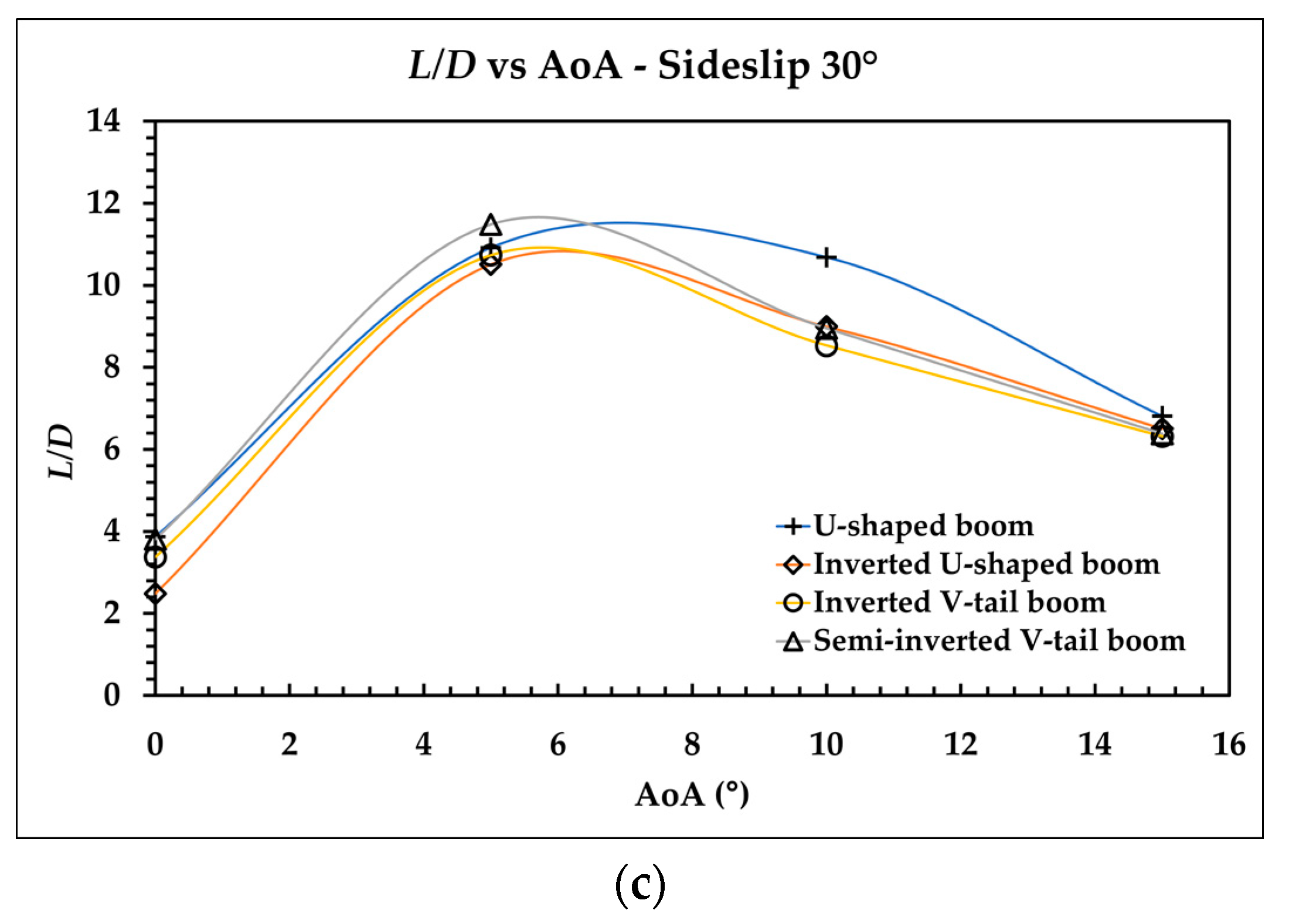
3.3. Lift, Critical Angle, Efficiency, and Stall Performance
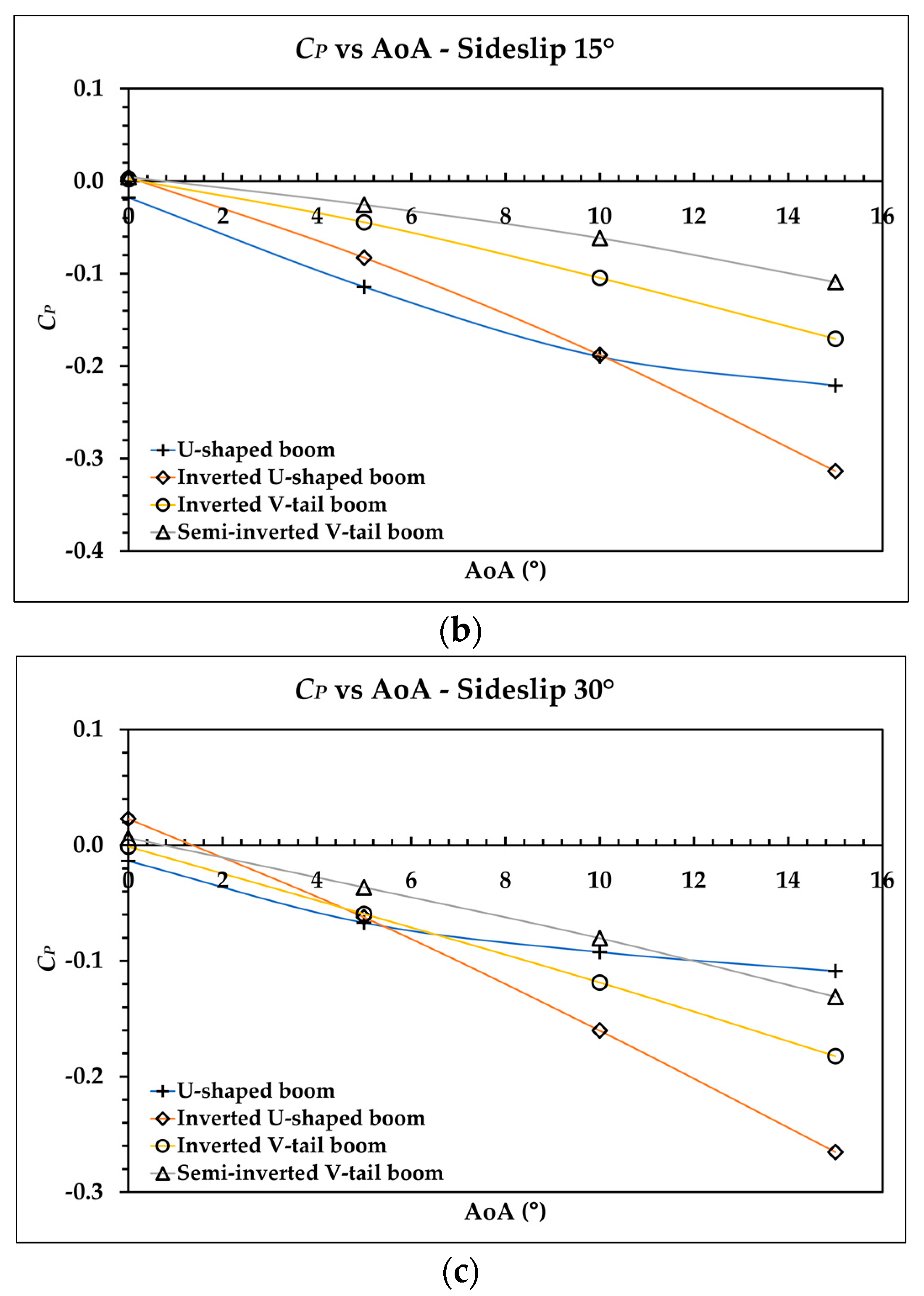
3.4. Stability Performance
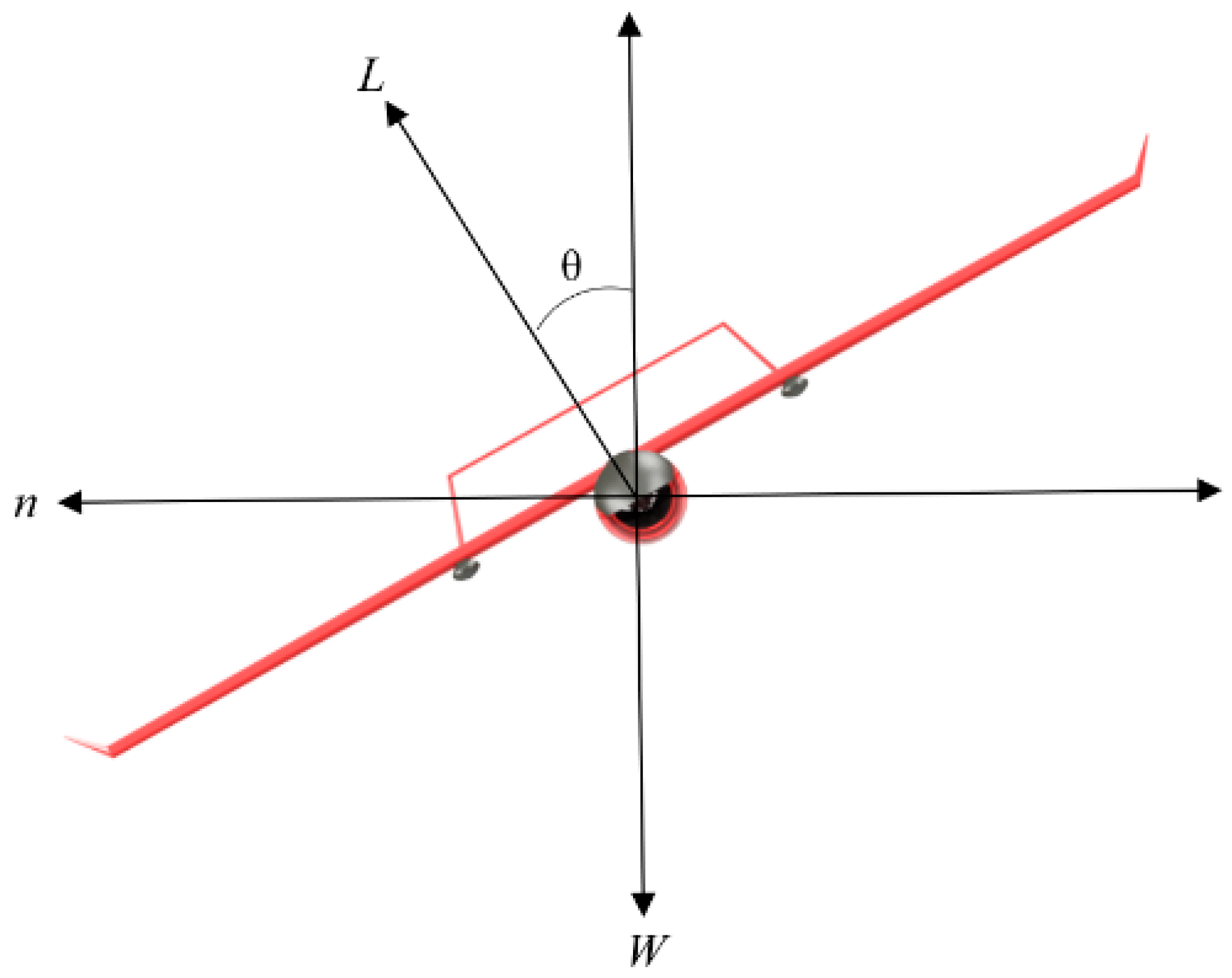
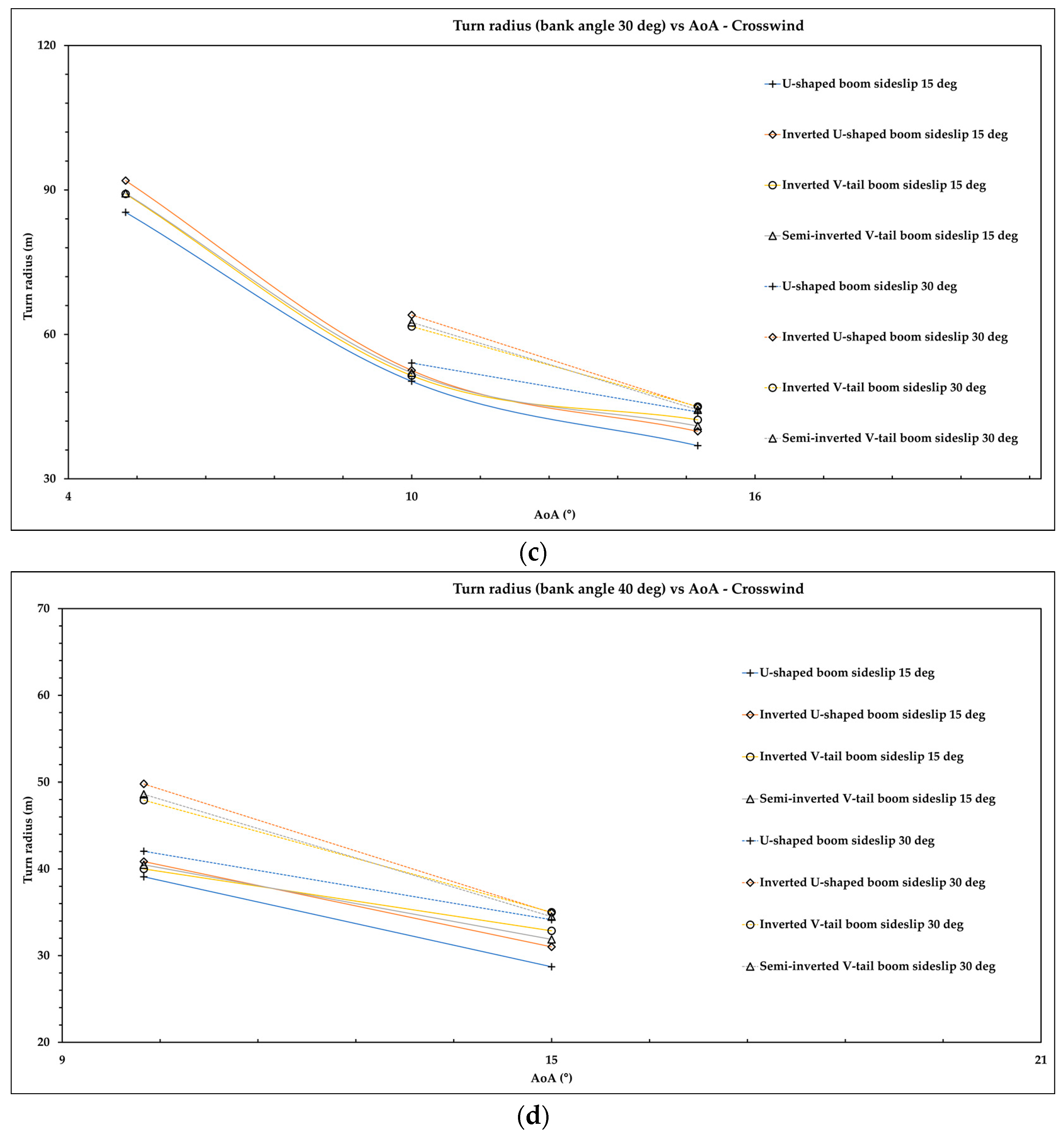
3.5. Maneuverability Performance
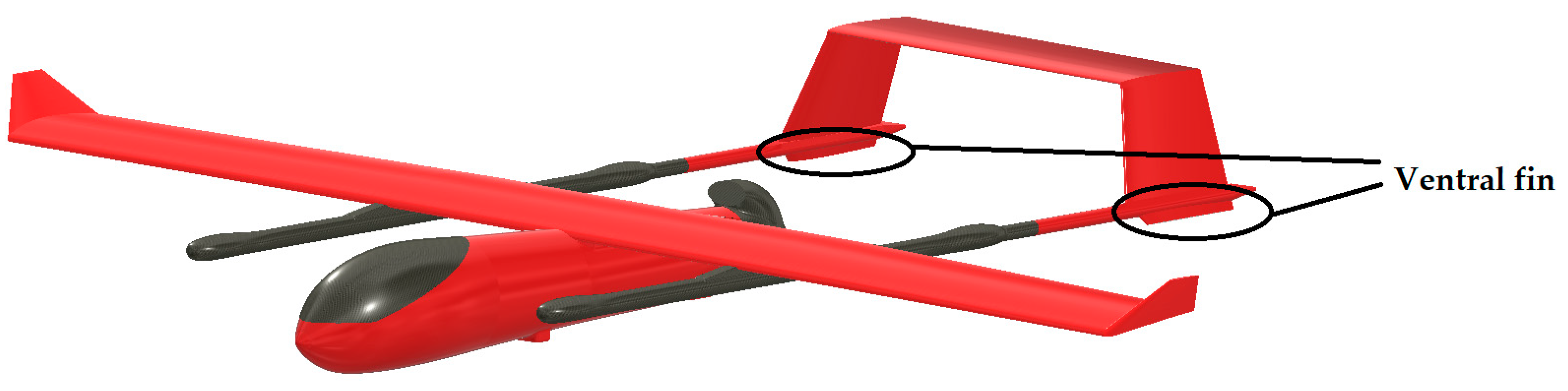
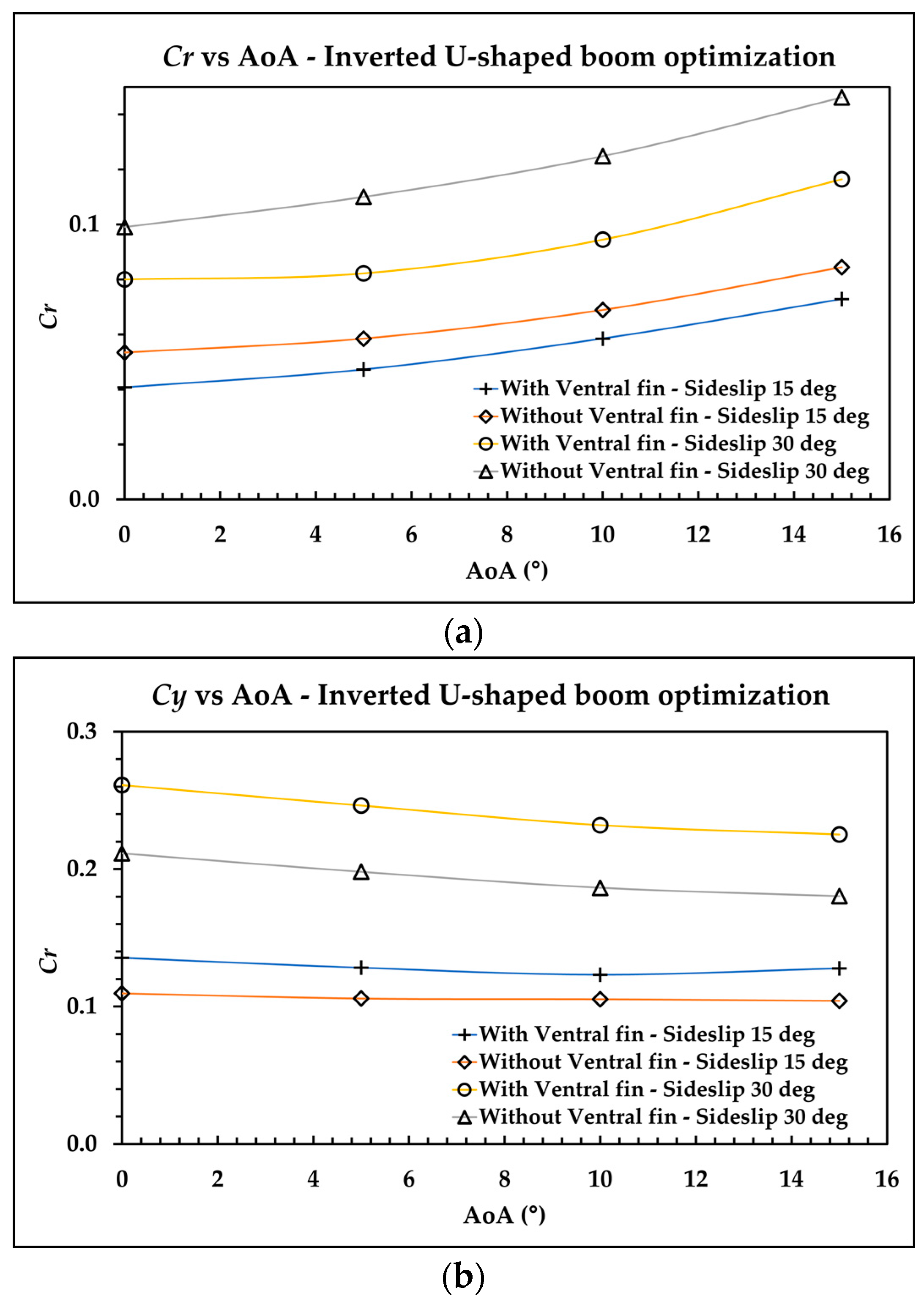
3.6. Design Optimization
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Banu, T.P.; Borlea, G.F.; Banu, C. The Use of Drone in Forestry. Environ. Sci. Eng. B 2016, 5, 557–562. [Google Scholar]
- Miller, C.R. Military Unmanned Aerial Vehicles and Diversification Opportunities; Mississippi Defense Diversification Initiative—Technical Report; United States Department of Defense Office of Economic Adjustment: Arlington, VA, USA, 2018; pp. 4–7. [Google Scholar] [CrossRef]
- Jo, D.; Kwon, T. Development of Autonomous VTOL UAV for Wide Area Surveillance. World J. Eng. Technol. 2019, 7, 227–239. [Google Scholar] [CrossRef] [Green Version]
- Atkins, E.M.; Mathur, A. Design, modelling and hybrid control of a quadplane. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 and 19–21 January 2021; p. 0374. [Google Scholar] [CrossRef]
- Aktas, Y.O.; Ozdemir, U.; Dereli, Y.; Tarhan, A.F.; Cetin, A.; Vuruskan, A.; Yuksek, B.; Cengiz, H.; Basdemir, S.; Ucar, M.; et al. Rapid Prototyping of a Fixed-Wing VTOL UAV for Design Testing. J. Intell. Robot. Syst. 2016, 84, 639–664. [Google Scholar] [CrossRef]
- Tyan, M.; Nguyen, N.V.; Kim, S.; Lee, J.W. Comprehensive Preliminary Sizing/Resizing Method for a Fixed Wing—VTOL Electric UAV. Aerosp. Sci. Technol. 2017, 71, 30–41. [Google Scholar] [CrossRef]
- ALTI Ascend. Available online: https://www.ssass.co.za/alti-ascend (accessed on 12 October 2021).
- ALTI Transition. Available online: https://www.ssass.co.za/alti-transition (accessed on 12 October 2021).
- Gu, H.; Lyu, X.; Li, Z.; Shen, S.; Zhang, F. Development and experimental verification of a hybrid vertical take-off and landing (VTOL) Unamnned Aerial Vehicle (UAV). In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 160–169. [Google Scholar] [CrossRef]
- Out of the Black: SLT VTOL UAV. Available online: https://diydrones.com/profiles/blogs/out-of-the-black-slt-vtol-uav (accessed on 17 March 2022).
- Foxtech Great Shark 330 VTOL. Available online: https://www.foxtechfpv.com/foxtech-great-shark-330-vtol.html (accessed on 13 October 2021).
- Austin, R. Unmanned Aircraft Systems: UAV Design, Development, and Deployment, 1st ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2010; pp. 17–20. [Google Scholar]
- Roskam, J. Airplane Design Part 1: Preliminary Sizing of Airplanes, 1st ed.; Roskam Aviation and Engineering Corporation: Ottawa, KS, USA, 1985; pp. 89–190. [Google Scholar]
- Roskam, J.; Lan, C.T.E. Airplane Aerodynamics and Performance, 1st ed.; DARcorporation: Lawrence, KS, USA, 1997; pp. 95–107. [Google Scholar]
- Raymer, D.P. Aircraft Design: A Conceptual Approach, 6th ed.; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2018; pp. 158–161. [Google Scholar]
- Sadraey, M.H. Aircraft Design: A Systems Engineering Approach, 1st ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2013; pp. 203–325. [Google Scholar]
- Anderson, J.D. Aircraft Performance and Design, 1st ed.; WCB/McGraw-Hill: New York, NY, USA, 1999; pp. 46–60. [Google Scholar]
- Abbas, Y.K. Effect of Sideslip Angle on The Balance of Aircraft Moments Through Steady—State Spin. Int. J. Civ. Eng. Technol. 2017, 8, 627–633. [Google Scholar]
- Cho, H.; Han, C. Effect of Sideslip Angle on The Aerodynamic Characteristic of a Following Aircraft in Close Formation Flight. J. Mech. Sci. Technol. 2015, 29, 3691–3698. [Google Scholar] [CrossRef]
- Clancy, L.J. Aerodynamics, 1st ed.; Gulab Vazirani for Arnold-Heinemann Publishers: New Delhi, India, 1975; pp. 55–561. [Google Scholar]
- Hansen, J.L.; Cobleigh, B.R. Induced moment effect of formation flight using two F/A-18 aircraft. In Proceedings of the American Institute of Aeronautics AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002; pp. 1–18. [Google Scholar]
- Gu, X.; Ciampa, P.D.; Nagel, B. An automated CFD analysis workflow in overall aircraft design applications. CEAS Aeronaut. J. 2018, 9, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Phillips, D.A.; Soligo, M.J. Will CFD ever Replace Wind Tunnels for Building Wind Simulations. Int. J. High Rise Build. 2019, 8, 107–116. [Google Scholar] [CrossRef]
- Das, S.B.; Rajiv, R.; Menon, R.; Deodhar, R. Analysis and Simulation of Different Empennage Configurations for an Aircraft. Adv. Trends Mech. Aerosp. Eng. 2021, 2316, 6–8. [Google Scholar] [CrossRef]
- Musa, N.A.; Mansor, S.; Ali, A.; Omar, W.Z.W.; Latif, A.A.; Perumal, K. Effects of Aircraft Tail Configurations on Sensitivity to Yaw Disturbances. Appl. Mech. Mater. 2014, 629, 199–201. [Google Scholar]
- Civil Aviation Safety Regulation (CASR) Part 107. Available online: https://terra-drone.co.id/wp-content/uploads/2020/04/CASR-Part-107.pdf (accessed on 8 October 2021).
- UAV Sparrow VTOL. Available online: https://www.armour.gr/catalogues/pdf/UAV-SPARROW-VTOL.pdf (accessed on 14 October 2021).
- Gudmunsson, S. General Aviation Aircraft Design: Applied Methods and Procedures, 1st ed.; Elsevier Inc.: Waltham, MA, USA, 2014; p. 269. [Google Scholar]
- Air-Density and Specific Volume vs. Altitude. Available online: https://www.engineeringtoolbox.com/air-altitude-density-volume-d_195.html (accessed on 16 October 2021).
- Wibowo, S.B.; Sutrisno, I.; Rohmat, T.A. Study of Mesh Independence on The Computational Model of The Roll-up Vortex Phenomenon on Fighter and Delta Wing Models. Int. J. Fluid Mech. Res. 2019, 46, 427–439. [Google Scholar] [CrossRef]
- Mesh Quality & Advance Topics. Available online: https://featips.com/wp-content/uploads/2021/05/Mesh-Intro_16.0_L07_Mesh_Quality_and_Advanced_Topics.pdf (accessed on 20 October 2021).
- ANSYS Inc. ANSYS Fluent User’s Guide; Release 19.2.; ANSYS Inc.: Canonsburg, PA, USA, 2018; pp. 1179–1254. [Google Scholar]
- Hibbeler, R.C. Engineering Mechanics Dynamics, 12th ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2010; pp. 298–302. [Google Scholar]
- Etkin, B. Dynamics of Flight Stability and Control, 3rd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1995; pp. 33–37. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Requirement | Value |
|---|---|---|
| 1 | Take-off transition distance | 80 m |
| 2 | Landing transition distance | 150 m |
| 3 | Cruising altitude | 300 m |
| 4 | Cruising velocity | 23 m/s |
| 5 | Stall speed | 14 m/s |
| 6 | Load weight | 5.5 kg |
| 7 | Flight time | 6 h |
| 8 | Rate of climb | 5.5 m/s |
| 9 | Maximum Take-Off Weight (MTOW) | 14–15 kg |
| 10 | Wingspan | 3 m |
| Phase | Fuel Fraction | |
|---|---|---|
| Engine Start and Warm-up | 0.998 | |
| VTOL take-off preparation | 0.998 | |
| VTOL transition to fixed-wing | 0.998 | |
| Climb | 0.995 | |
| Cruise | (1) | |
| Loiter | (2) | |
| Cruise back | (3) | |
| Descent | 0.995 | |
| Landing, taxi, dan shutdown | 0.995 | |
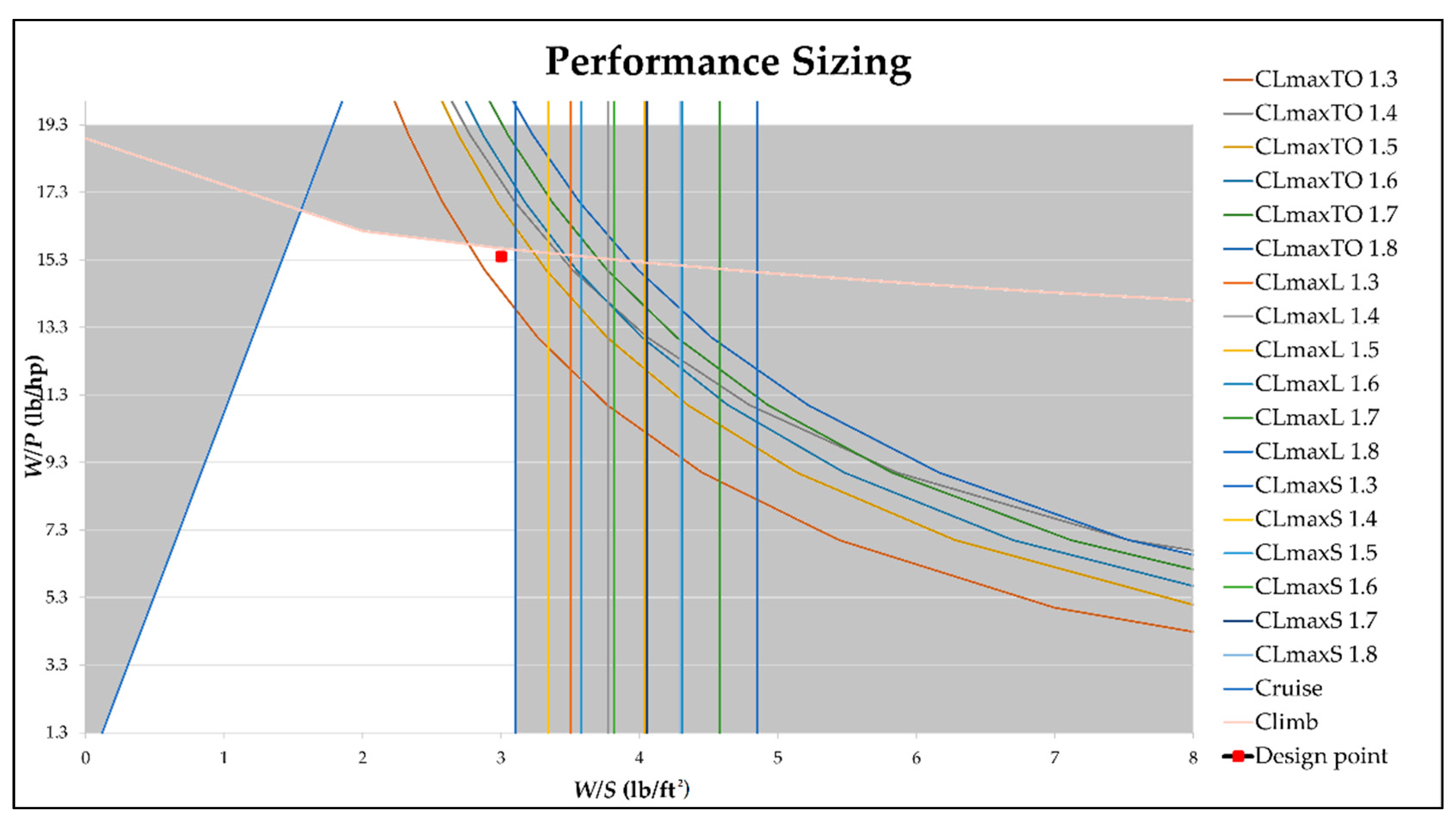
| VTOL-Plane Surveillance Sizing | |
|---|---|
| Wing loading (W/S) | 3 lb/ft2 = 14.7 kg/m2 |
| Power loading (W/P) | 15.4 lb/hp = 7 kg/hp |
| CLmaxTO | 1.4 |
| CLmaxL | 1.3 |
| CLmaxS | 1.3 |
| WTO | 14 kg |
| WE | 5.8 kg |
| WF | 2 kg |
| Wing Design | |
|---|---|
| s | 0.95 m2 |
| AR | 9.47 |
| λ | 0.28 |
| iw | 0° |
| 0° | |
| b | 3 m |
| Cr | 0.35 m |
| Ct | 0.25 m |
| Empennage General Design | |
|---|---|
| Vertical tail volume coefficient (Vv) | 0.04 |
| Horizontal tail volume coefficient (Vh) | 0.6 |
| Distance of 25% wing MAC to 25% vertical empennage MAC (Lv) | 1.1 m |
| Distance of 25% wing MAC to 25% vertical horizontal MAC (Lh) | 1.12 m |
| Tail incidence (α) | 0° |
| U-shaped boom configuration | |
| Dihedral angle (Γ) | 0° |
| Vertical stabilizer root chord (Crvertical) | 0.28 m |
| Vertical stabilizer tip chord (Ctvertical) | 0.22 m |
| Vertical stabilizer span (bvertical) | 0.22 m |
| Horizontal stabilizer root chord (Crhorizontal) | 0.18 m |
| Horizontal stabilizer tip chord (Cthorizontal) | 0.18 m |
| Horizontal stabilizer span (bhorizontal) | 0.96 m |
| Inverted U-shaped boom configuration | |
| Dihedral angle (Γ) | 70° |
| Vertical stabilizer root chord (Crvertical) | 0.28 m |
| Vertical stabilizer tip chord (Ctvertical) | 0.22 m |
| Vertical stabilizer span (bvertical) | 0.22 m |
| Horizontal stabilizer root chord (Crhorizontal) | 0.22 m |
| Horizontal stabilizer tip chord (Cthorizontal) | 0.22 m |
| Horizontal stabilizer span (bhorizontal) | 0.80 m |
| Inverted V-tail boom configuration | |
| Dihedral angle (Γ) | 30° |
| V-tail stabilizer root chord (Crv-tail) | 0.30 m |
| V-tail stabilizer tip chord (Ctv-tail) | 0.22 m |
| V-tail stabilizer span (bv-tail) | 0.55 m |
| Semi-inverted V-tail boom configuration | |
| Dihedral angle (Γ) | 45° |
| V-tail stabilizer root chord (Crv-tail) | 0.30 m |
| V-tail stabilizer tip chord (Ctv-tail) | 0.22 m |
| V-tail stabilizer span (bv-tail) | 0.55 m |
| Horizontal stabilizer root chord (Crhorizontal) | 0.22 m |
| Horizontal stabilizer tip chord (Cthorizontal) | 0.22 m |
| Horizontal stabilizer span (bhorizontal) | 0.18 m |
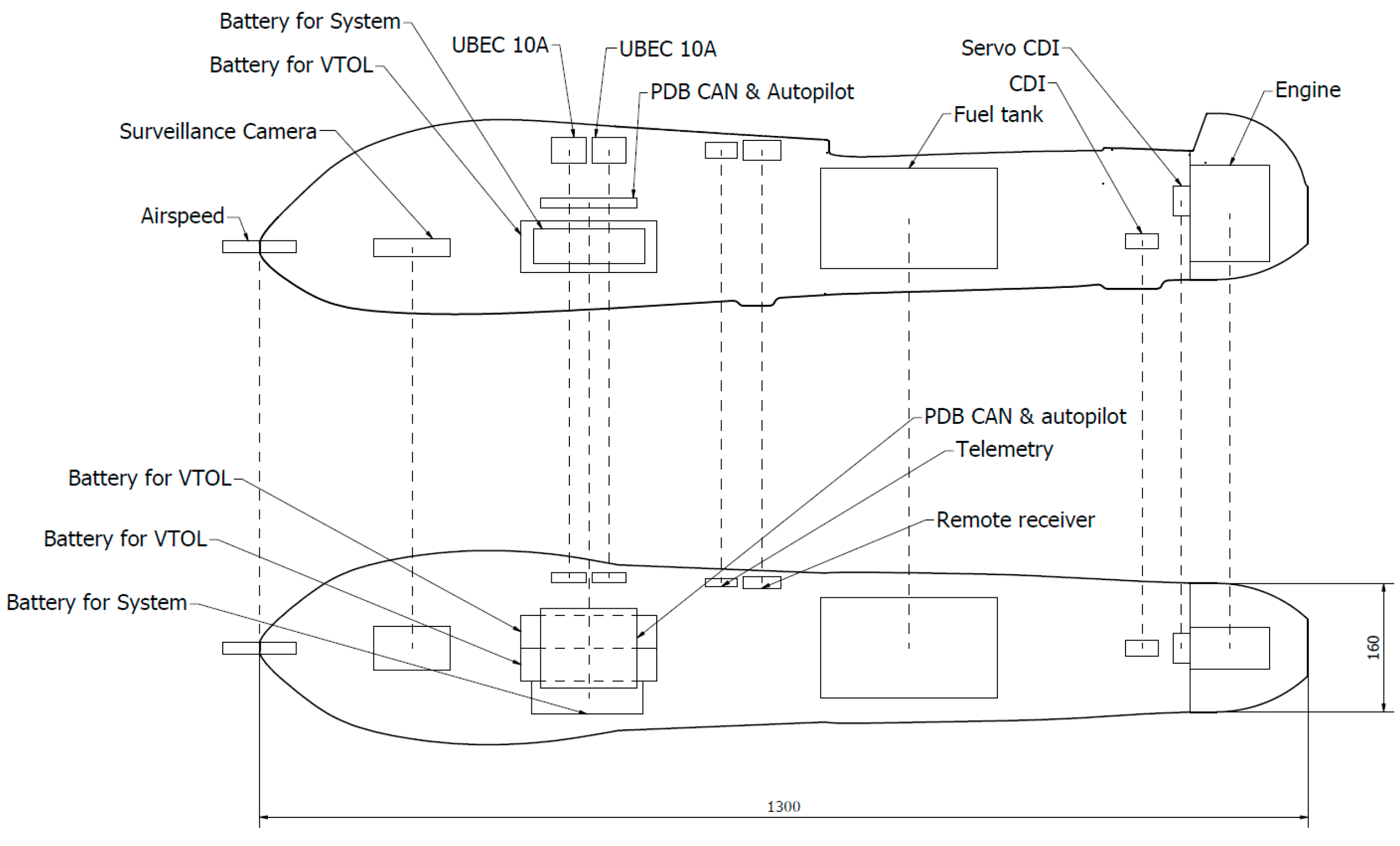
| Components | Quantity | Dimension (mm) | ||
|---|---|---|---|---|
| Length | Width | Height | ||
| Battery for VTOL | 2 | 169 | 65 | 39 |
| Battery for System | 1 | 138 | 43 | 41 |
| UBEC-10A | 2 | 43.1 | 32.3 | 12.5 |
| PDB and Autopilot | 1 | 120 | 100 | 12 |
| Telemetry | 1 | 40 | 20 | 10 |
| Servo CDI | 1 | 40.5 | 20.3 | 38 |
| Remote receiver | 1 | 47.3 | 24.9 | 14.3 |
| Fuel tank | 1 | 220 | 125 | 125 |
| Engine | 1 | 120 | 52.5 | 110 |
| Airspeed | 1 | 92 | 14 | 14 |
| CDI | 1 | 40 | 20 | 18 |
| Surveillance Camera | 1 | 71 | 55 | 33.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nugroho, G.; Zuliardiansyah, G.; Rasyiddin, A.A. Performance Analysis of Empennage Configurations on a Surveillance and Monitoring Mission of a VTOL-Plane UAV Using a Computational Fluid Dynamics Simulation. Aerospace 2022, 9, 208. https://doi.org/10.3390/aerospace9040208
Nugroho G, Zuliardiansyah G, Rasyiddin AA. Performance Analysis of Empennage Configurations on a Surveillance and Monitoring Mission of a VTOL-Plane UAV Using a Computational Fluid Dynamics Simulation. Aerospace. 2022; 9(4):208. https://doi.org/10.3390/aerospace9040208
Chicago/Turabian StyleNugroho, Gesang, Galih Zuliardiansyah, and Azhar Aulia Rasyiddin. 2022. "Performance Analysis of Empennage Configurations on a Surveillance and Monitoring Mission of a VTOL-Plane UAV Using a Computational Fluid Dynamics Simulation" Aerospace 9, no. 4: 208. https://doi.org/10.3390/aerospace9040208
APA StyleNugroho, G., Zuliardiansyah, G., & Rasyiddin, A. A. (2022). Performance Analysis of Empennage Configurations on a Surveillance and Monitoring Mission of a VTOL-Plane UAV Using a Computational Fluid Dynamics Simulation. Aerospace, 9(4), 208. https://doi.org/10.3390/aerospace9040208