Form-Finding Analysis of Mesh Reflector of Large Parabolic Cylindrical Antenna

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Form-Finding Analysis of Mesh Reflectors Based on HIFDM
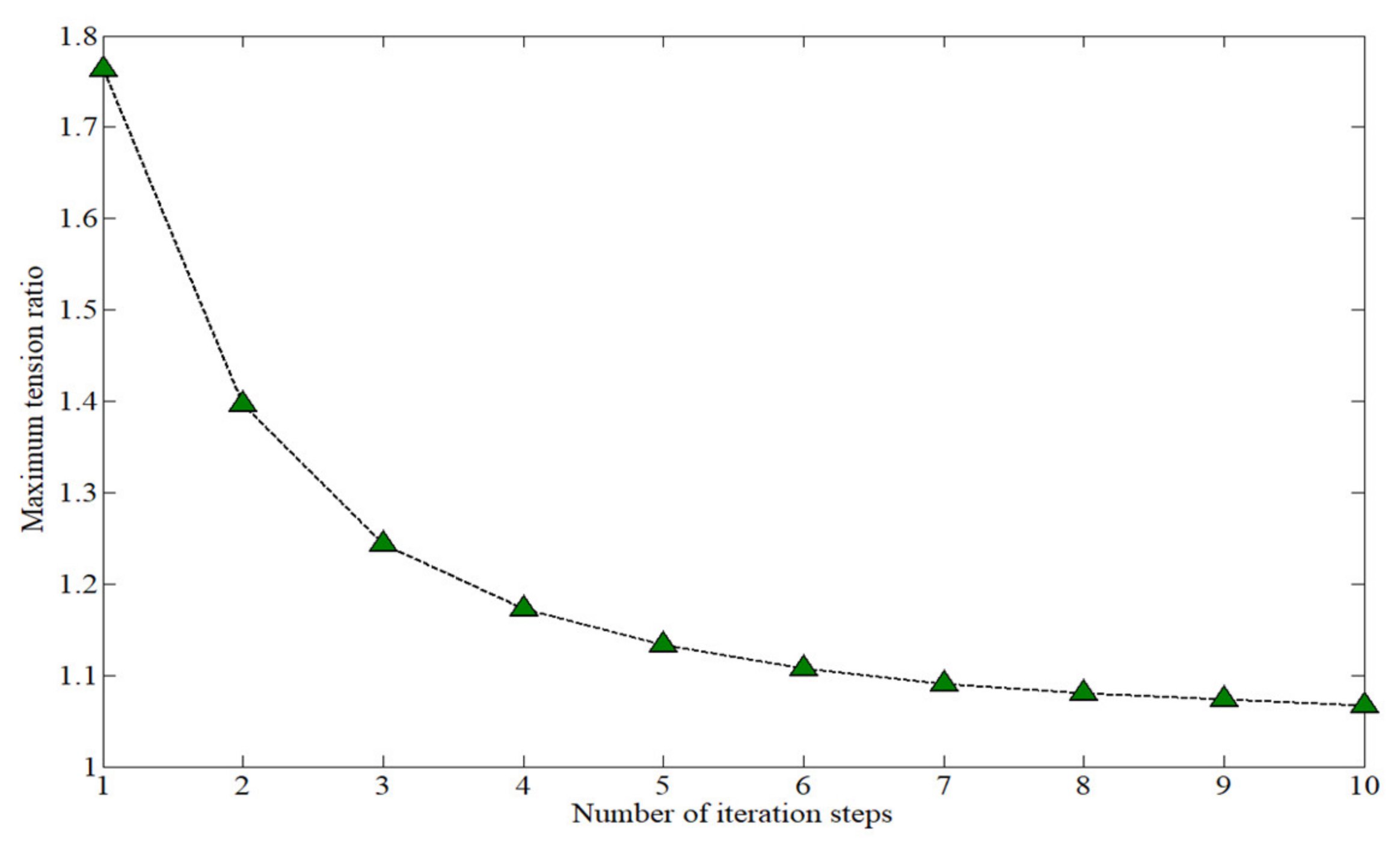
2.1. The Principle of Iterative FDM
2.2. Form-Finding Analysis of a Mesh Reflector Based on Iterative FDM
2.3. Hybrid Iteration Force Density Method (HIFDM)
3. Optimization Analysis of Antenna Reflector Accuracy Based on GA
3.1. Optimization Target
- First, the pretension of the boundary segment obtained according to the HIFDM in Section 2 was used as the initial distribution strategy. is the floating range allowed by the pretension. The pretension allocation schemes, , were randomly generated to form the initial population. The adjusted pretension of the boundary segment was obtained according to Equation (13), and is the uniformly random number from to .
- is introduced into the form-finding model of the HIFDM and the RMS of the antenna mesh reflector was obtained. The process was repeated until the RMS values of all initial populations were obtained.
- The fitness function value was calculated according to . Then, the roulette model was used to screen the individuals based on the fitness function value and a population composed of relatively superior individuals was obtained.
- A cross mutation operation was carried out on the screened population and the optimal individual was retained according to certain probabilities to form the next-generation population.
- Steps (2) through (4) were repeated until the RMS difference value between any two generations later was less than the given precision (in this paper ); that is, the population convergence and the optimal pretension distribution scheme were obtained.
3.2. Optimization Results Analysis
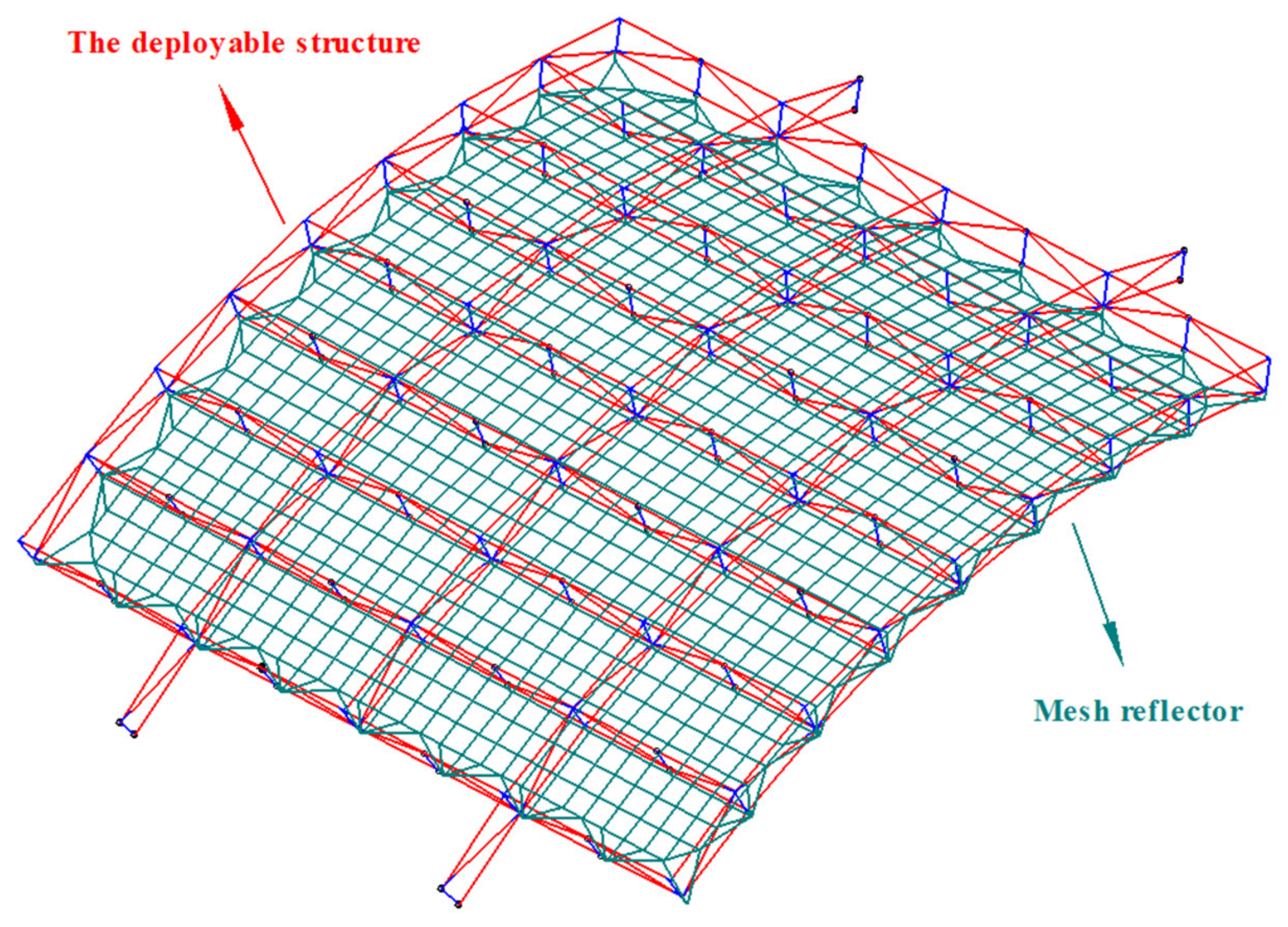
4. Form-Finding Analysis of an Antenna Reflector with the Deformation of a Deployable Structure
4.1. Static Model of the Deployable Structure Based on the FEM

4.2. Iterative Strategy for Form-Finding of an Antenna Mesh Reflector
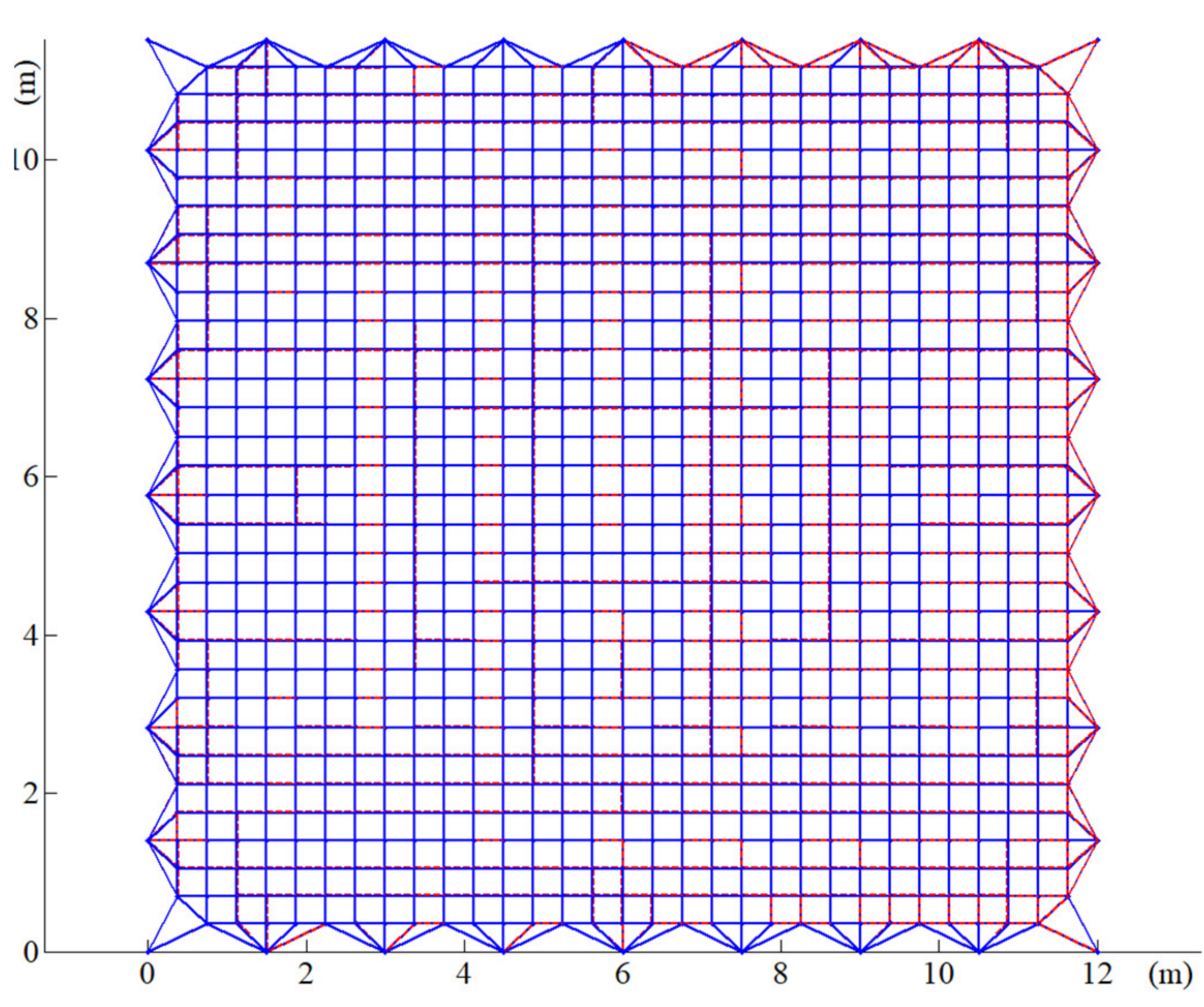
4.3. Form-Finding Results Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, R.; Shi, C.; Guo, H.; Li, B.; Tian, D.; Deng, Z. Review of Space Deployable Antenna Mechanisms. J. Mech. Eng. 2020, 56, 1. [Google Scholar]
- Guo, J.; Zhao, Y.; Xu, Y.; Li, Y.; Yao, J. Design and analysis of truss deployable antenna mechanism based on a novel symmetric hexagonal profile division method. Chin. J. Aeronaut. 2020, 34, 87–100. [Google Scholar] [CrossRef]
- Duan, B. The State-of-the-art and Development Trend of Large Space-borne Deployable Antenna. Electro-Mech. Eng. 2017, 33, 1–14. [Google Scholar]
- Lin, F.; Chen, C.; Chen, J.; Chen, M. Modelling and analysis for a cylindrical net-shell deployable mechanism. Adv. Struct. Eng. 2019, 22, 3149–3160. [Google Scholar] [CrossRef]
- Fan, Y.; Li, T.; Ma, X.; Li, Z. Form-finding method of equal tension cable networks for space mesh antennas. J. Xi’an Dianzi Keji Daxue Xuebao/J. Xidian Univ. 2015, 42, 49–55. [Google Scholar]
- Maddio, P.D.; Meschini, A.; Sinatra, R.; Cammarata, A. An optimized form-finding method of an asymmetric large deployable reflector. Eng. Struct. 2019, 181, 27–34. [Google Scholar] [CrossRef]
- Yuan, P.; He, B.; Zhang, L.; Yuan, Z.; Ma, X. Pretension design of cable-network antennas considering the deformation of the supporting truss: A double-loop iterative approach. Eng. Struct. 2019, 186, 399–409. [Google Scholar] [CrossRef]
- Khatibinia, M.; Hosseinaei, S.; Sarafrazi, S.R. Efficiency of dynamic relaxation methods in form-finding of tensile membrane structures. SN Appl. Sci. 2019, 1, 1–13. [Google Scholar] [CrossRef] [Green Version]
- You, G. A Structural Analysis Method for Cable-Beam Composite Structure. Math. Probl. Eng. 2020, 4, 1–13. [Google Scholar] [CrossRef]
- Li, H.; Yang, J. Application of nonlinear finite element method in the form-finding of lattice shells. Spat. Struct. 2016, 4, 12–16. [Google Scholar]
- Xu, X.; Wang, Y.; Luo, Y. Finding member connectivities and nodal positions of tensegrity structures based on force density method and mixed integer nonlinear programming. Eng. Struct. 2018, 166, 240–250. [Google Scholar] [CrossRef]
- Xu, R.; Li, D.X.; Liu, W.; Jiang, J.; Liao, Y.; Wang, J. Modified nonlinear force density method for form-finding of membrane SAR antenna. Struct. Eng. Mech. 2015, 54, 1045–1059. [Google Scholar] [CrossRef]
- Aboul-Nasr, G.; Mourad, S.A. An extended force density method for form finding of constrained cable nets. Case Stud. Struct. Eng. 2015, 3, 19–32. [Google Scholar] [CrossRef] [Green Version]
- Moskaleva, A.; Ruiz, M.A.F.; Martín, L.M.G.; Frolovskaia, A.; Gerashchenko, S.; Hernandez-Montes, E. Form-finding of Bionic Structures Using the Force Density Method and Topological Mapping. Civ. Eng. Arch. 2019, 7, 65–74. [Google Scholar] [CrossRef]
- Cai, J.; Wang, X.; Deng, X.; Feng, J. Form-finding method for multi-mode tensegrity structures using extended force density method by grouping elements. Compos. Struct. 2018, 187, 1–9. [Google Scholar] [CrossRef]
- Pauletti, R.M.O.; Fernandes, F.L. An outline of the Natural Force Density Method and its extension to quadrilateral elements. Int. J. Solids Struct. 2019, 9, 423–438. [Google Scholar] [CrossRef]
- Wei, S.; Ohsaki, M. Geometry and topology optimization of plane frames for compliance minimization using force density method for geometry model. Eng. Comput. 2020, 37, 1–18. [Google Scholar]
- Liu, M.; Cao, D.; Li, J.; Zhang, X.; Wei, J. Dynamic modeling and vibration control of a large flexible space truss. Meccanica 2022, 57, 1017–1033. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Zhang, Y.; Ye, J. Force density sensitivity form-finding design method for cable-mesh reflector antennas considering interactive effects between cable network and supporting truss. J. Eng. Struct. 2021, 244, 112722. [Google Scholar] [CrossRef]
- Yang, G.; Duan, B.; Du, J.; Zhang, Y. Shape pre-adjustment of deployable mesh antennas considering space thermal loads. Proc. Inst. Mech. Eng. Part G. J. Aerosp. Eng. 2018, 232, 143–155. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, X.; Luo, Y. Form-finding of tensegrity structures via rank minimization of force density matrix. Eng. Struct. 2021, 227, 111419. [Google Scholar] [CrossRef]
- Dai, L.; Xiao, R. Optimal design and analysis of deployable antenna truss structure based on dynamic characteristics restraints. Aerosp. Sci. Technol. 2020, 106, 106086. [Google Scholar] [CrossRef]
- Li, P.; Liu, C.; Tian, Q.; Hu, H.; Song, Y. Dynamics of a Deployable Mesh Reflector of Satellite Antenna: Form-Finding and Modal Analysis. J. Comput. Nonlinear Dyn. 2016, 11, 041017. [Google Scholar] [CrossRef]
- Li, P.; Liu, C.; Tian, Q.; Hu, H.; Song, Y. Dynamics of a Deployable Mesh Reflector of Satellite Antenna: Parallel Computation and Deployment Simulation. J. Comput. Nonlinear Dyn. 2016, 11, 061005. [Google Scholar] [CrossRef]
- Liu, R.; Guo, H.; Liu, R.; Tangb, D.; Wangb, H.; Denga, Z. Design and form finding of cable net for a large cable-rib tension antenna with flexible deployable structures. Eng. Struct. 2019, 199, 109662. [Google Scholar] [CrossRef]
- Niu, S.; Li, K.; Liu, J.; Bao, H. A Refined Shape Sensing Method for Skin Antenna Structure Based on Inverse Finite Element Method. Appl. Sci. 2020, 10, 7620. [Google Scholar] [CrossRef]
- Morterolle, S.; Maurin, B.; Quirant, J.; Dupuy, C. Numerical form-finding of geotensoid tension truss for mesh reflector. Acta Astronaut. 2012, 76, 154–163. [Google Scholar] [CrossRef] [Green Version]
- Han, X.K.; Zhang, Z. Topological Optimization of Phononic Crystal Thin Plate by a Genetic Algorithm. Sci. Rep. 2019, 9, 8331. [Google Scholar] [CrossRef] [Green Version]
- Luo, X.-Q. Comparision between Readitional Optimized Algorithm and Heredity Algorithm. J. Hubei Univ. Technol. 2007, 3, 32–34. [Google Scholar]
- Marrouchi, S.; Hessine, M.B.; Chebbi, S. New Strategy Based on Combined Use of Genetic Algorithm and Gradient to Solve the UC Problem: Theoretical Investigation and Comparative Study. Int. J. Eng. Technol. 2018, 7, 44–50. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Chen, C.; Jiang, S.; Chen, J.; Liu, T.; Deng, W.; Lin, F. Optimization Analysis of Microgravity Experimental Facility for the Deployable Structures Based on Force Balance Method. Microgravity Sci. Technol. 2020, 32, 773–785. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Dong, J.; Song, Z.; Chen, C.; Li, J. Form-Finding Analysis of Mesh Reflector of Large Parabolic Cylindrical Antenna. Aerospace 2022, 9, 239. https://doi.org/10.3390/aerospace9050239
Chen J, Dong J, Song Z, Chen C, Li J. Form-Finding Analysis of Mesh Reflector of Large Parabolic Cylindrical Antenna. Aerospace. 2022; 9(5):239. https://doi.org/10.3390/aerospace9050239
Chicago/Turabian StyleChen, Jinbao, Jiayu Dong, Zhicheng Song, Chuanzhi Chen, and Jiaqi Li. 2022. "Form-Finding Analysis of Mesh Reflector of Large Parabolic Cylindrical Antenna" Aerospace 9, no. 5: 239. https://doi.org/10.3390/aerospace9050239
APA StyleChen, J., Dong, J., Song, Z., Chen, C., & Li, J. (2022). Form-Finding Analysis of Mesh Reflector of Large Parabolic Cylindrical Antenna. Aerospace, 9(5), 239. https://doi.org/10.3390/aerospace9050239