
Nonlinear Slewing Control of a Large Flexible Spacecraft Using Reaction Wheels



Abstract
:1. Introduction
- model a large satellite with reaction wheels and flexible solar panels, using the Newton–Euler formulation;
- implement and test an inertia-free nonlinear attitude control algorithm based on rotation matrices, while neglecting actuation, for the purpose of sizing the attitude control system and evaluating the elastic displacements as a function of required torque and maneuver duration;
- design an optimal rotation strategy for the solar panels, with the intent of maximizing the power storage;
- test the nonlinear attitude control algorithm with the inclusion of both actuation dynamics and flexibility of the solar panels (which rotate during the maneuver), with the final aim of evaluating the coupling effects between overall rotational motion and elastic dynamics, thus ascertaining practical feasibility of the slewing maneuver.
2. Spacecraft Modeling
- position of its center of mass (C) with respect to the inertial reference frame,
- rotation of the members with respect to the inertial reference frame, and
- elastic displacements of the flexible bodies.
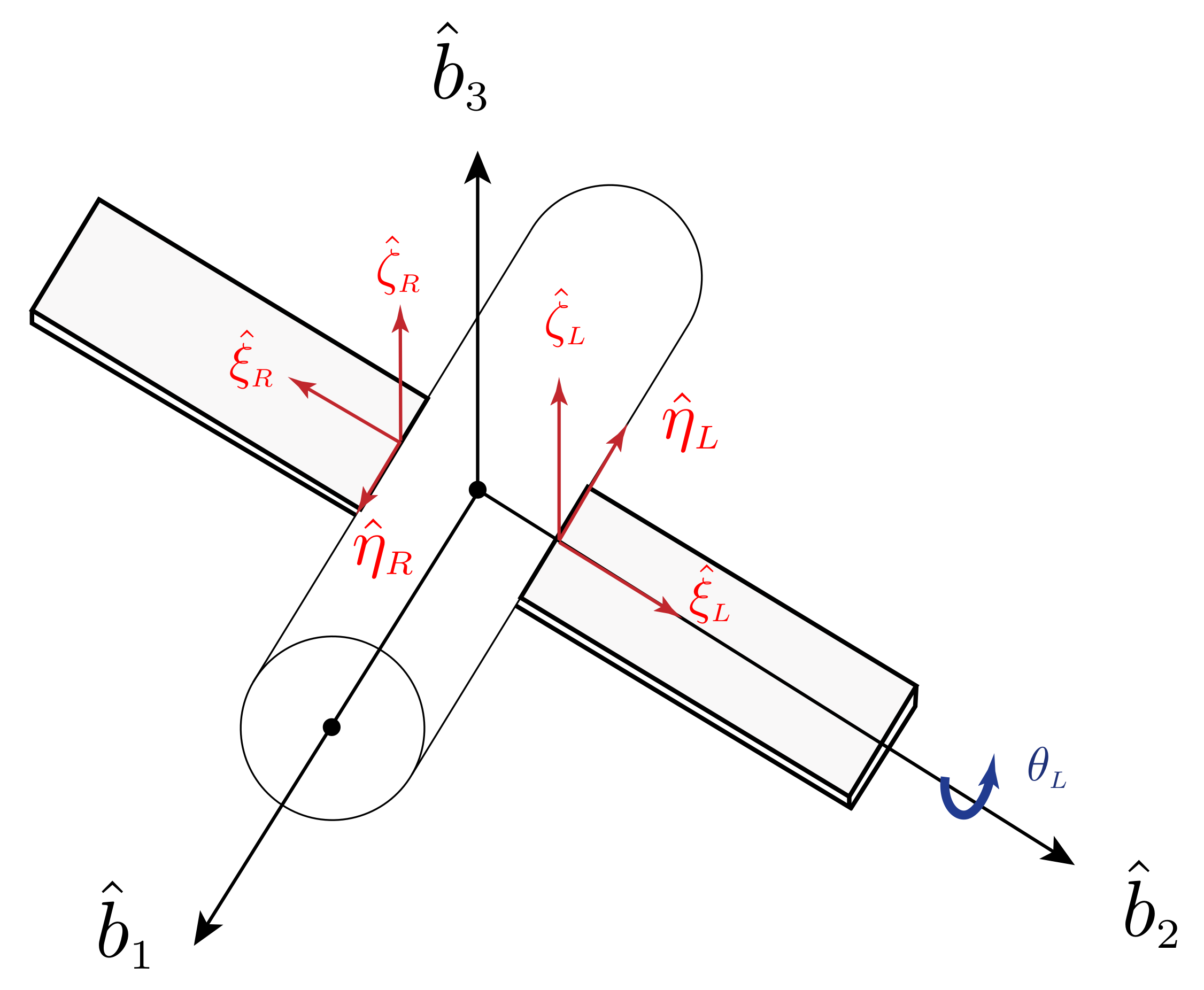
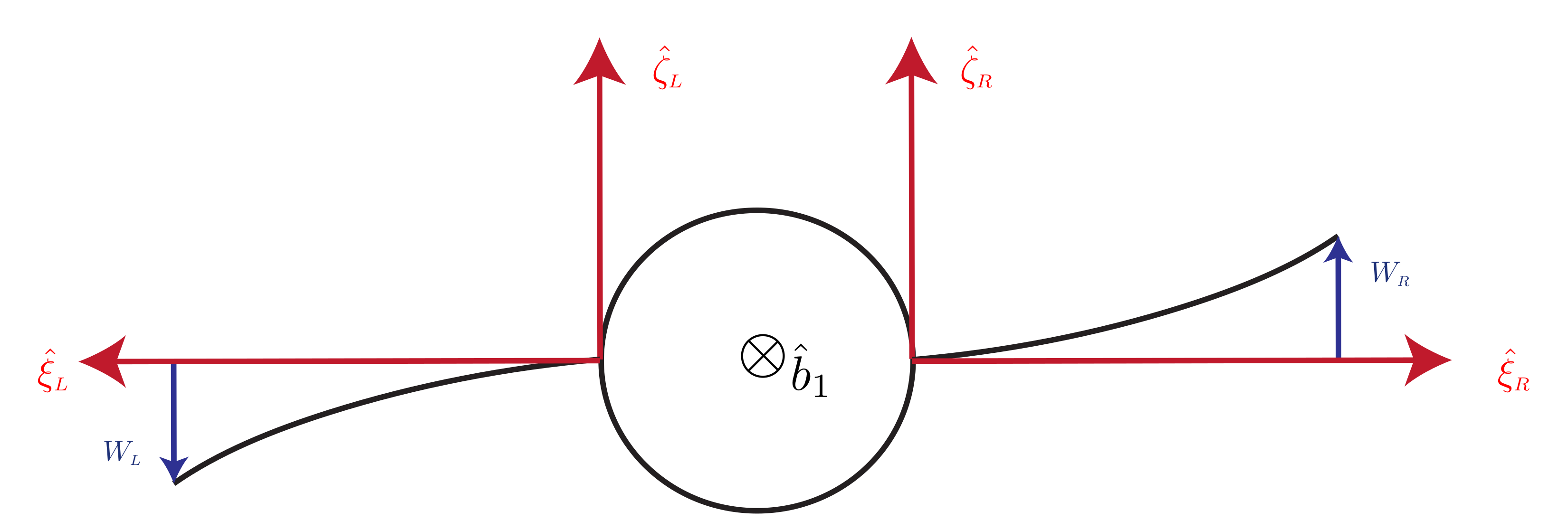
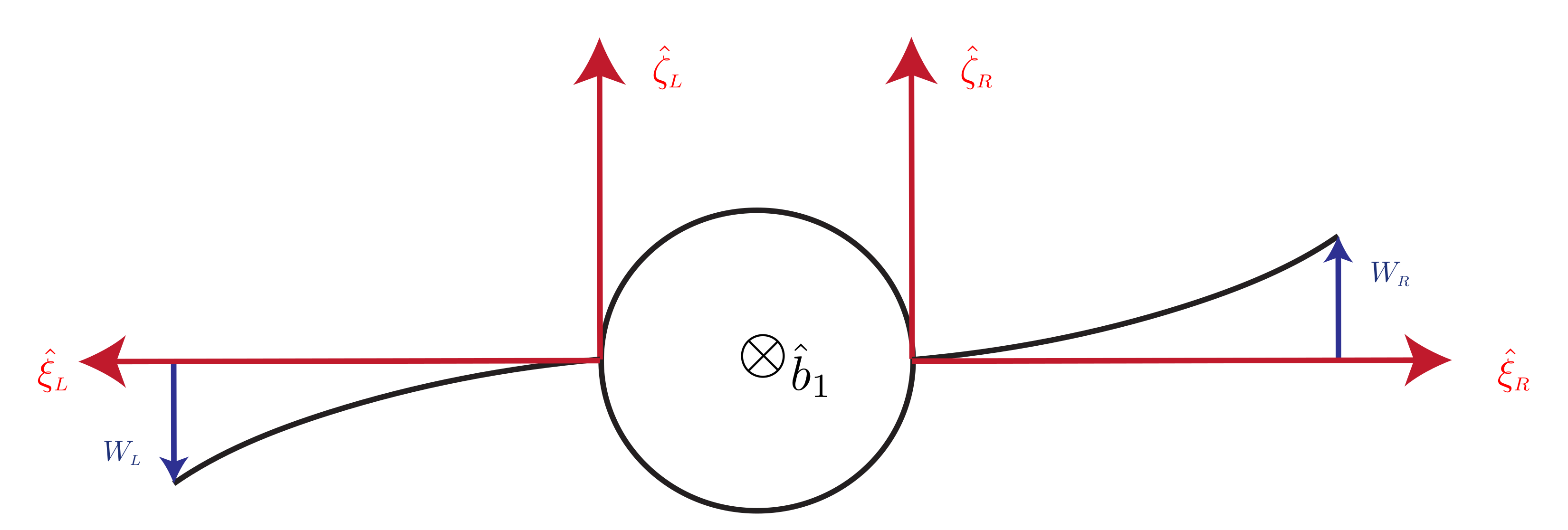
2.1. Flexible Appendages
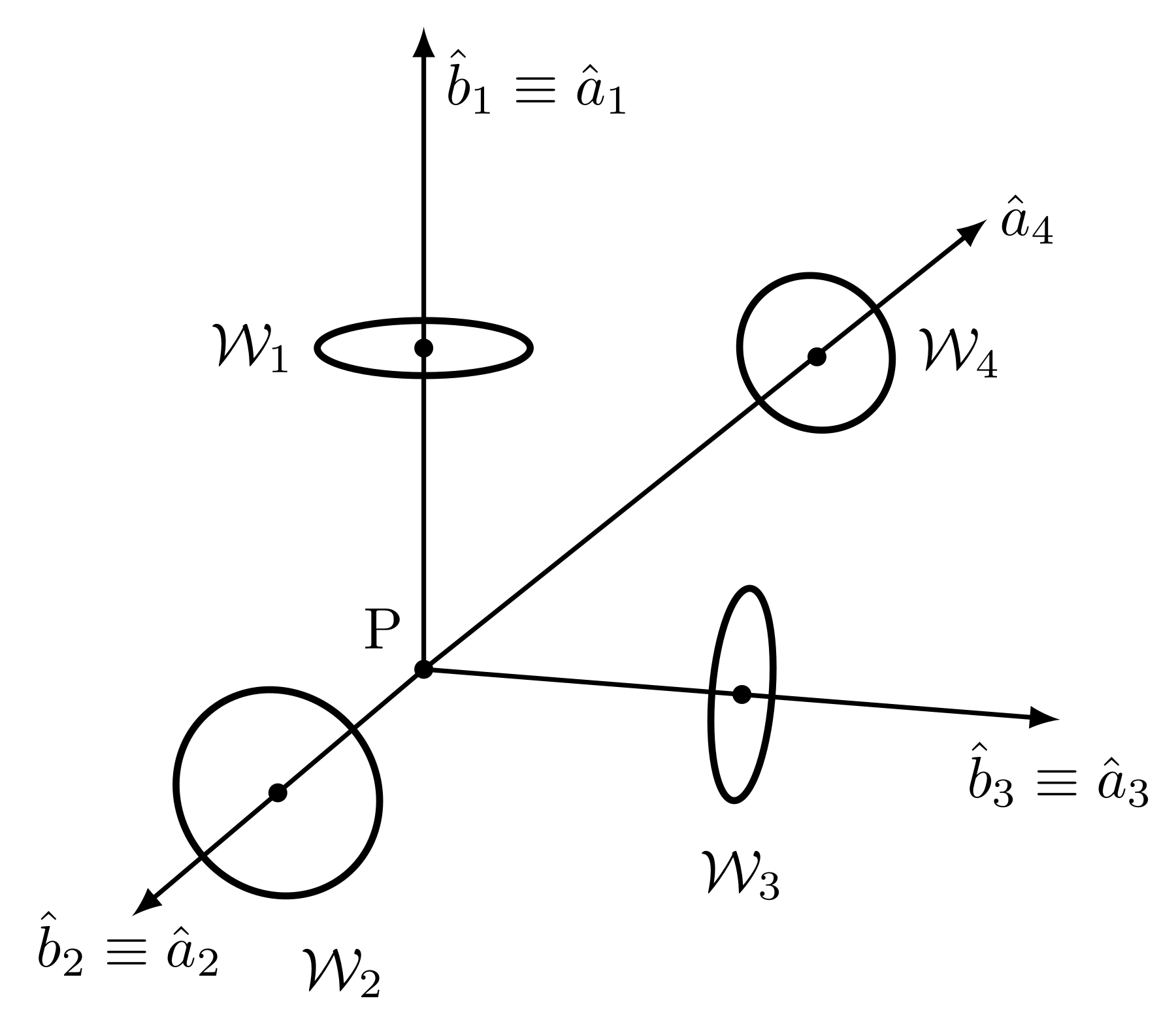
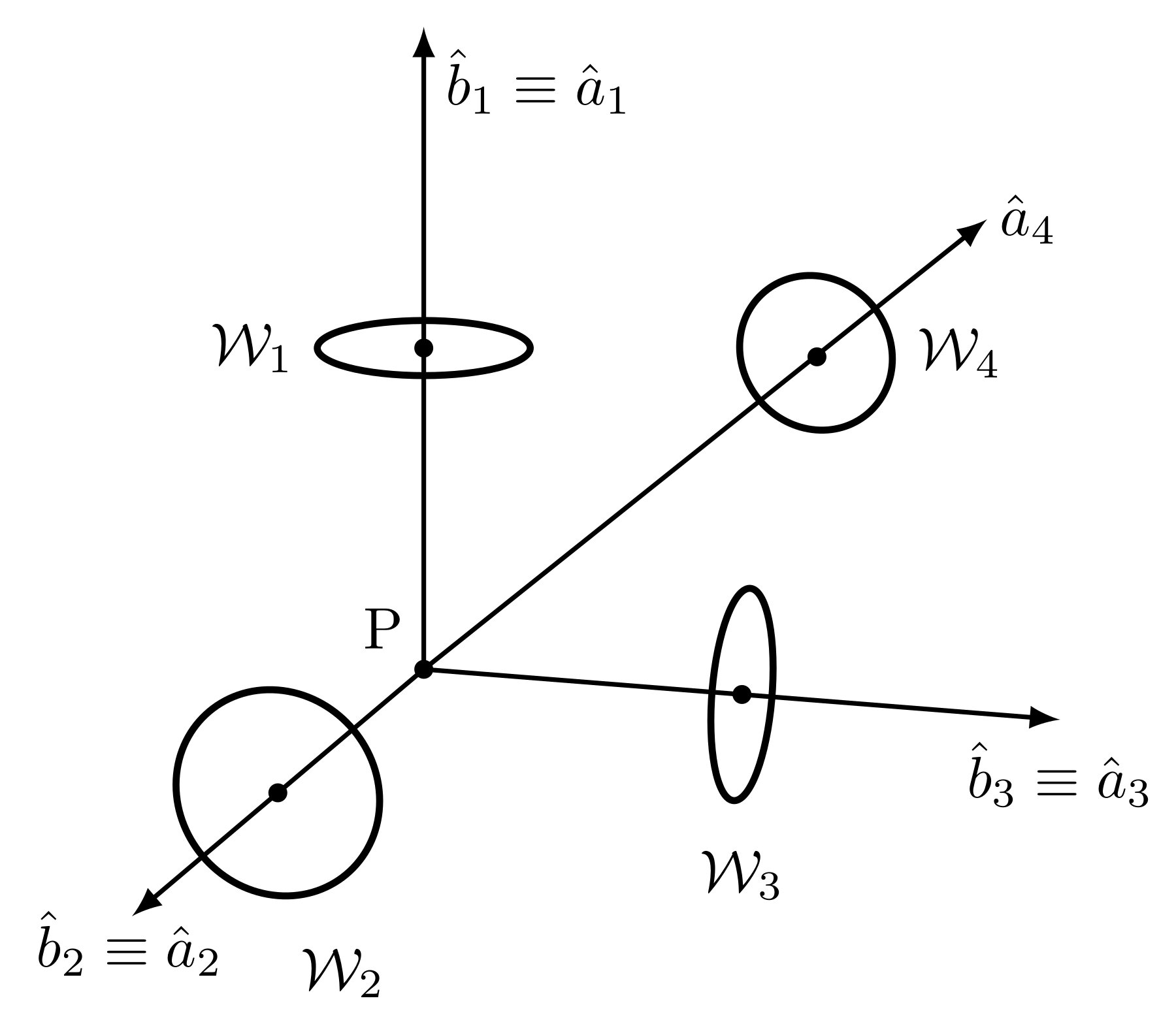
2.2. Actuators
3. Spacecraft Attitude Dynamics with Flexibility
4. Inertia-Free Nonlinear Attitude Control
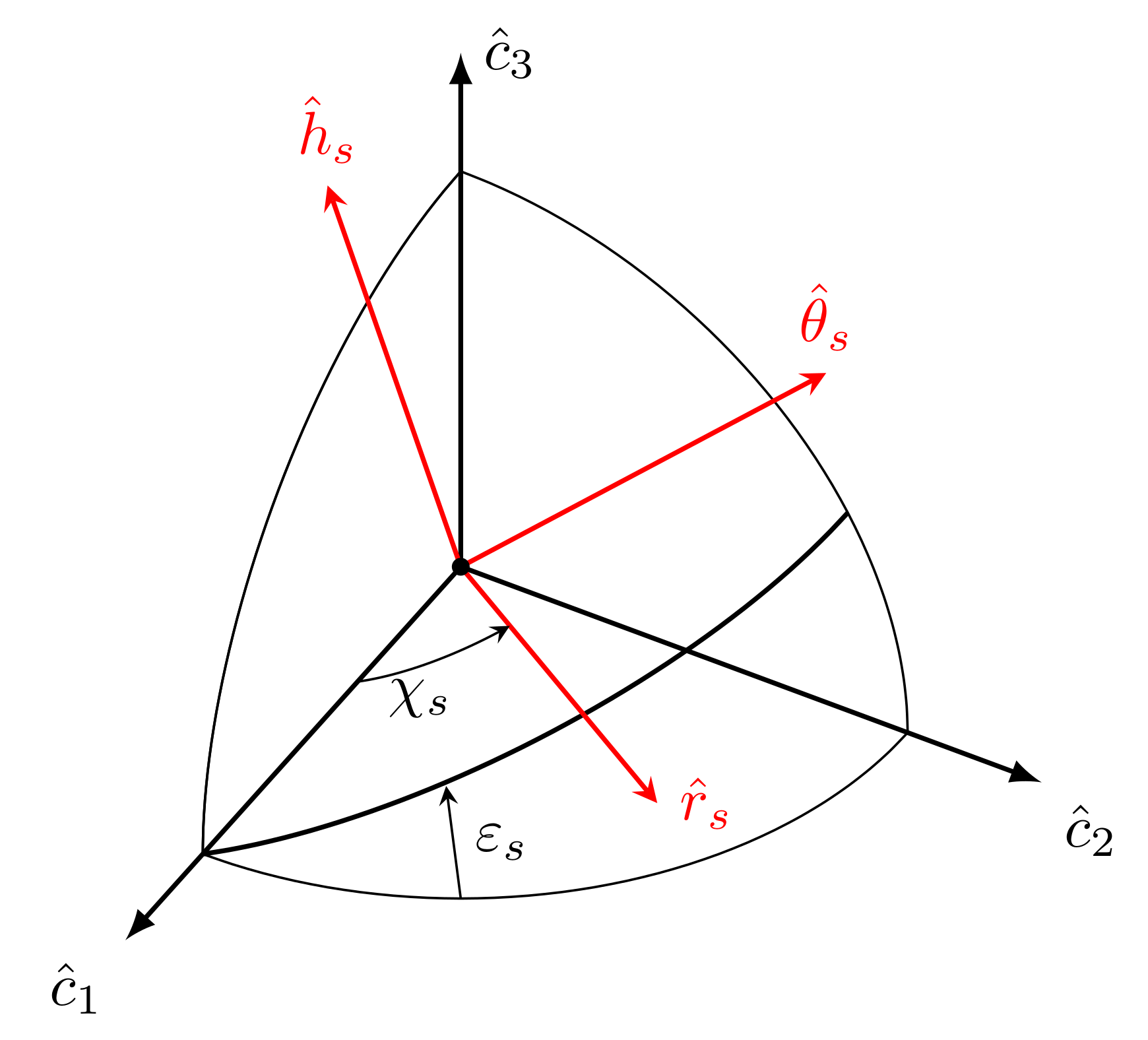
5. Optimal Solar Panel Rotation
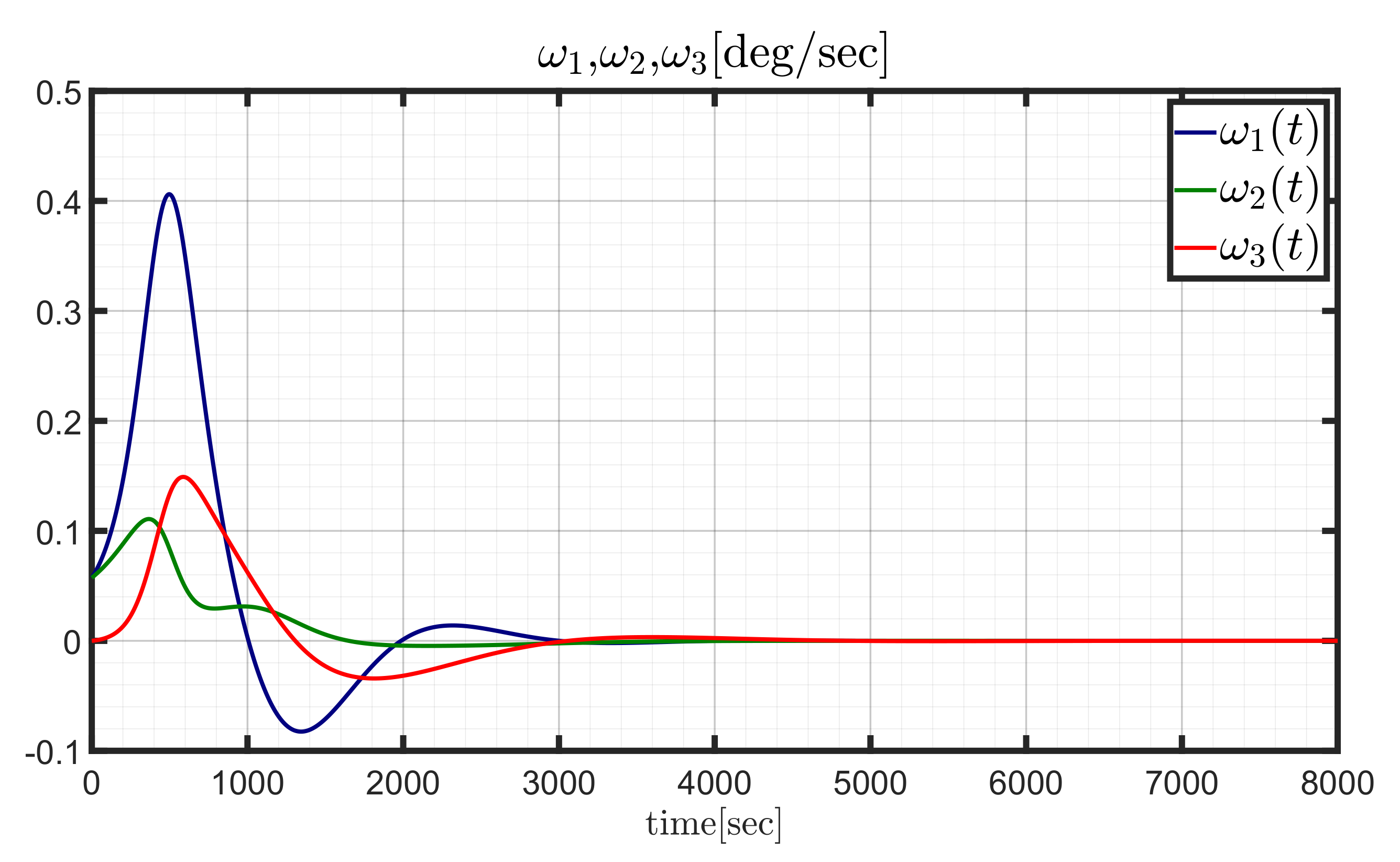
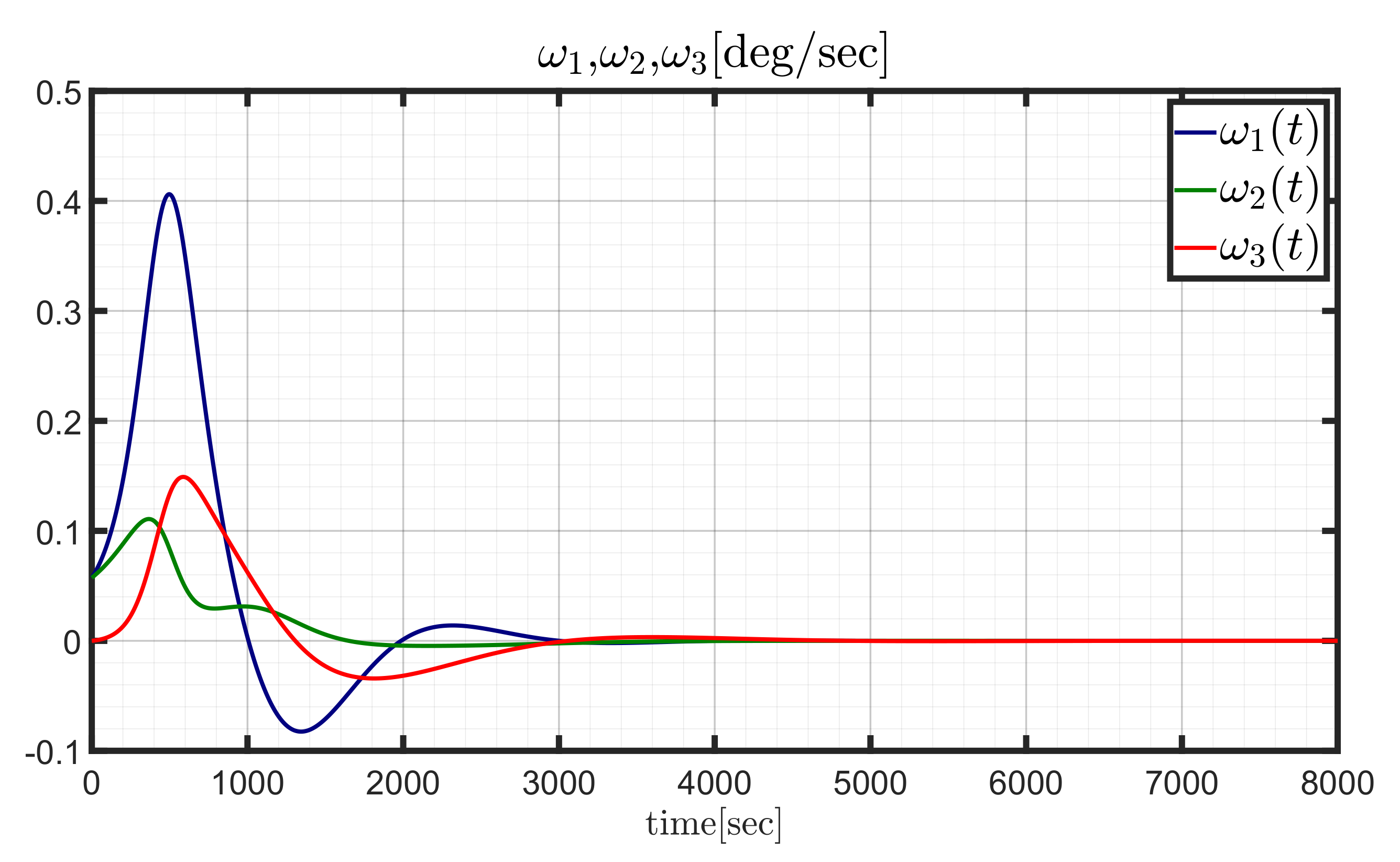
6. Numerical Simulations
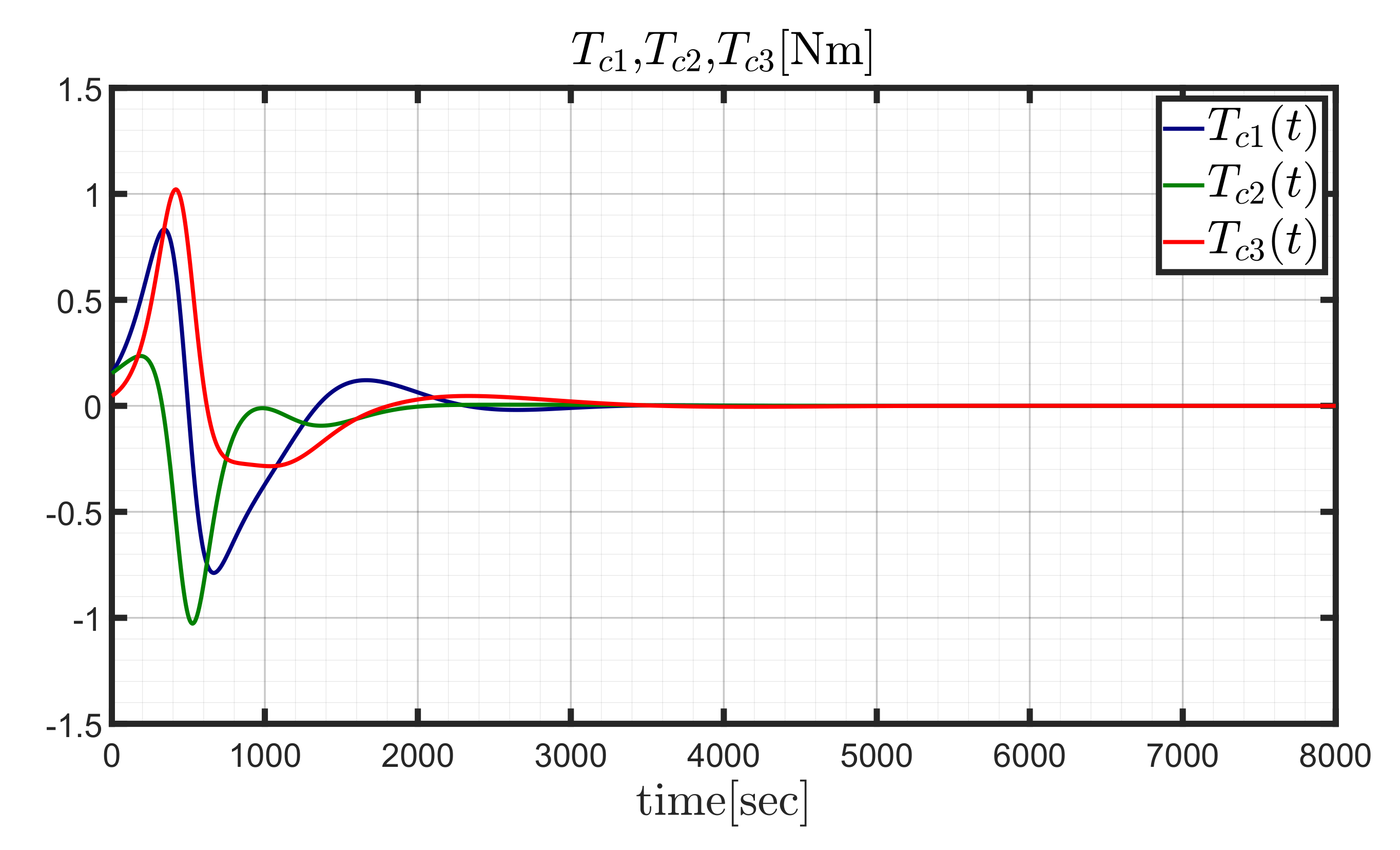
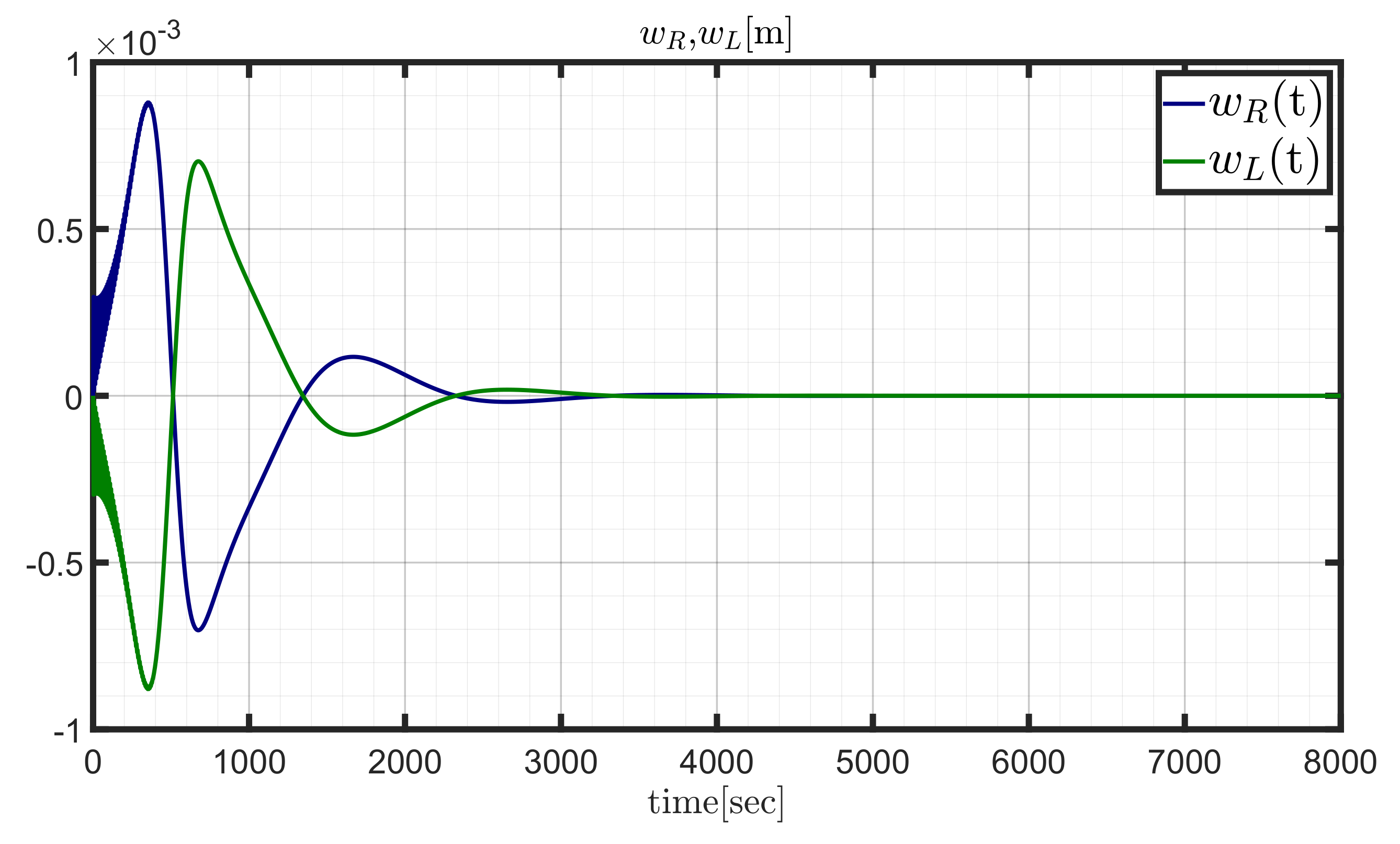
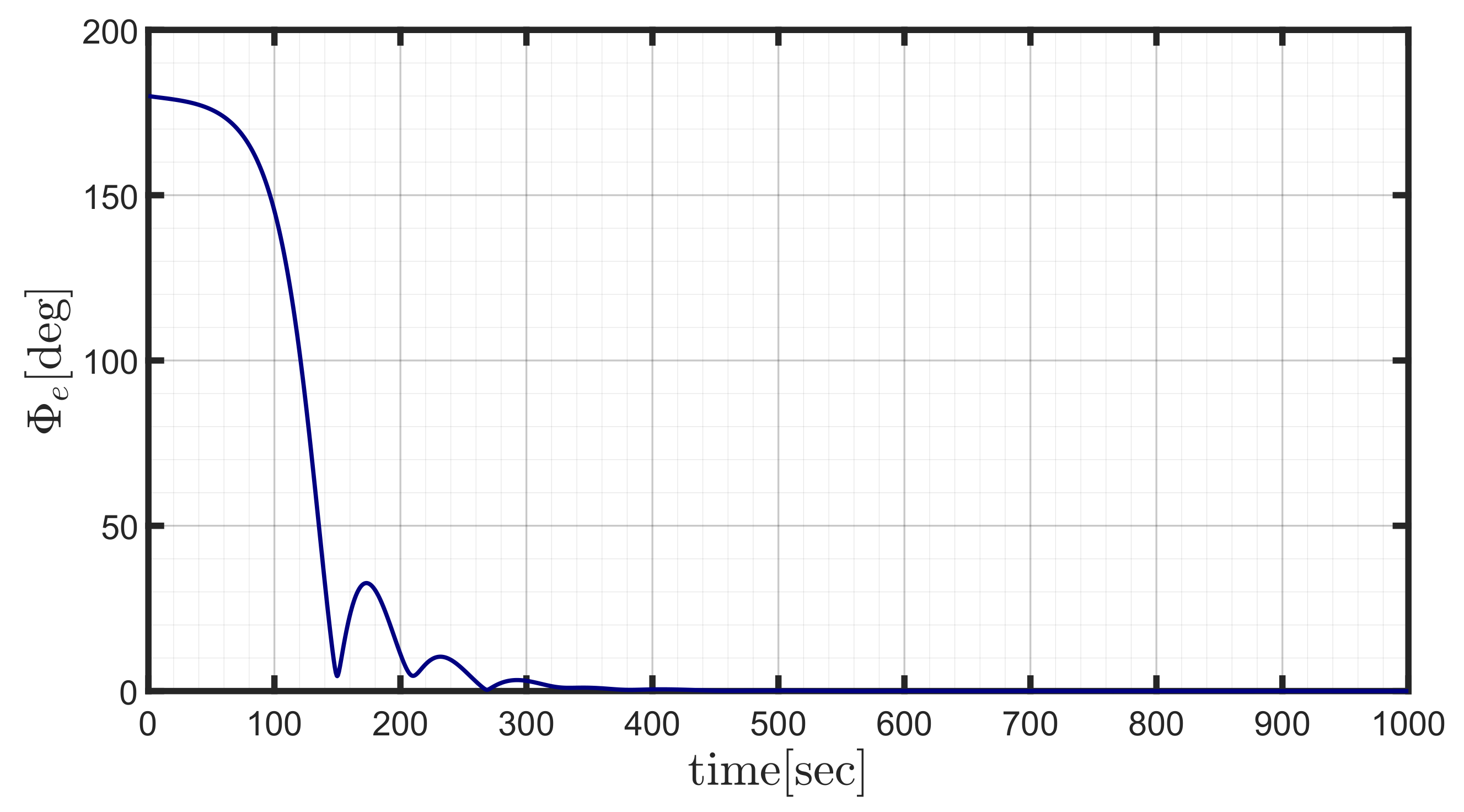
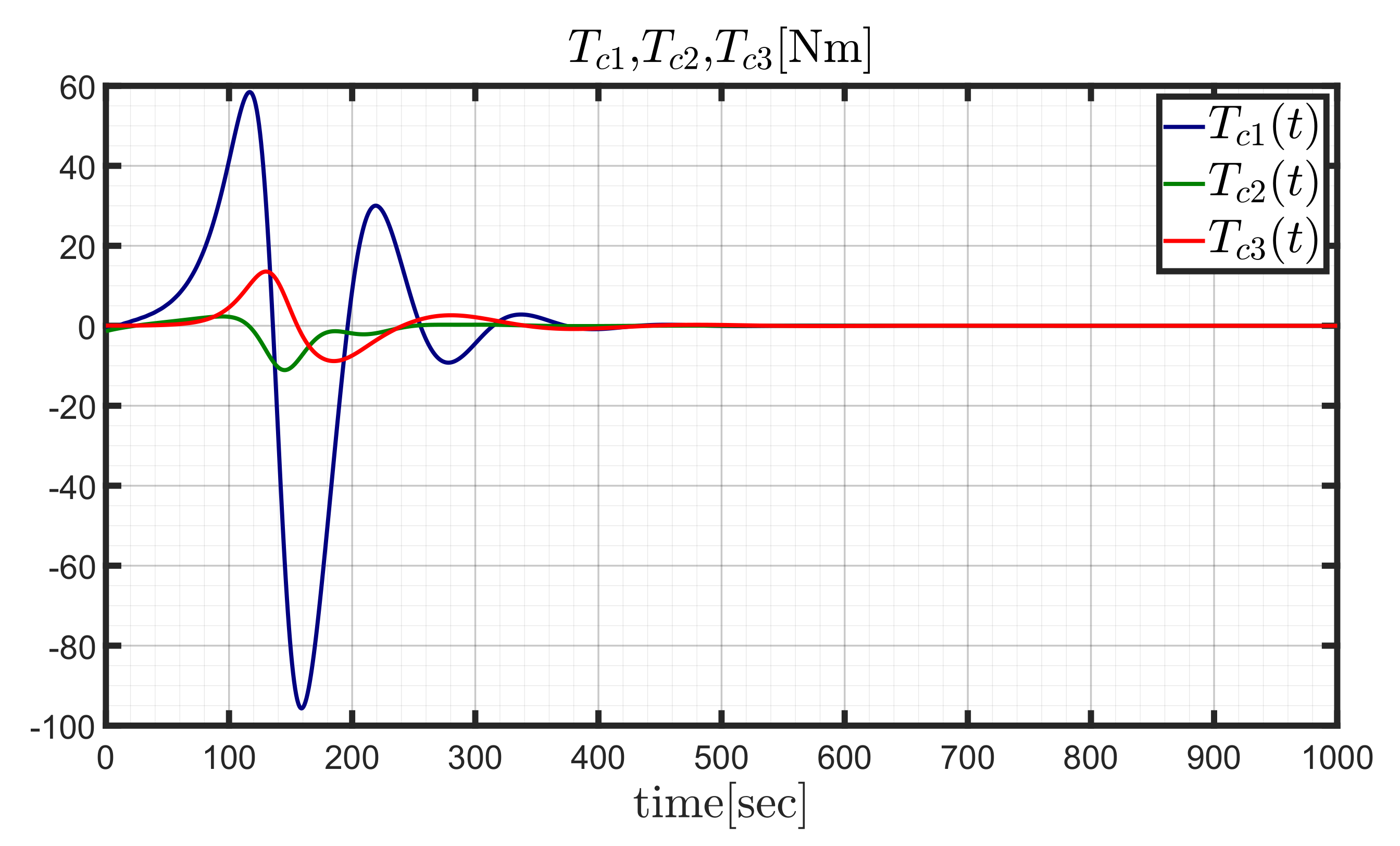
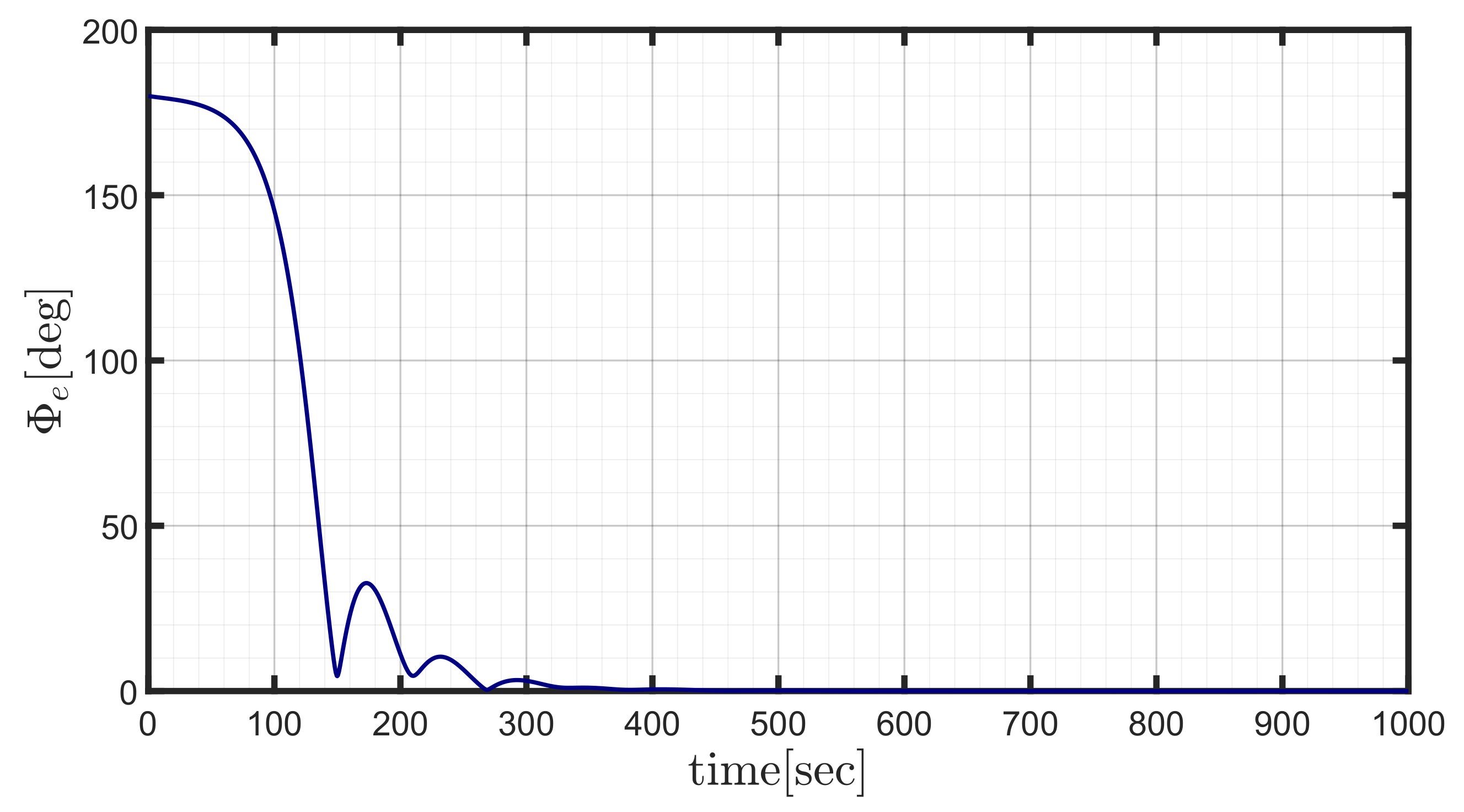
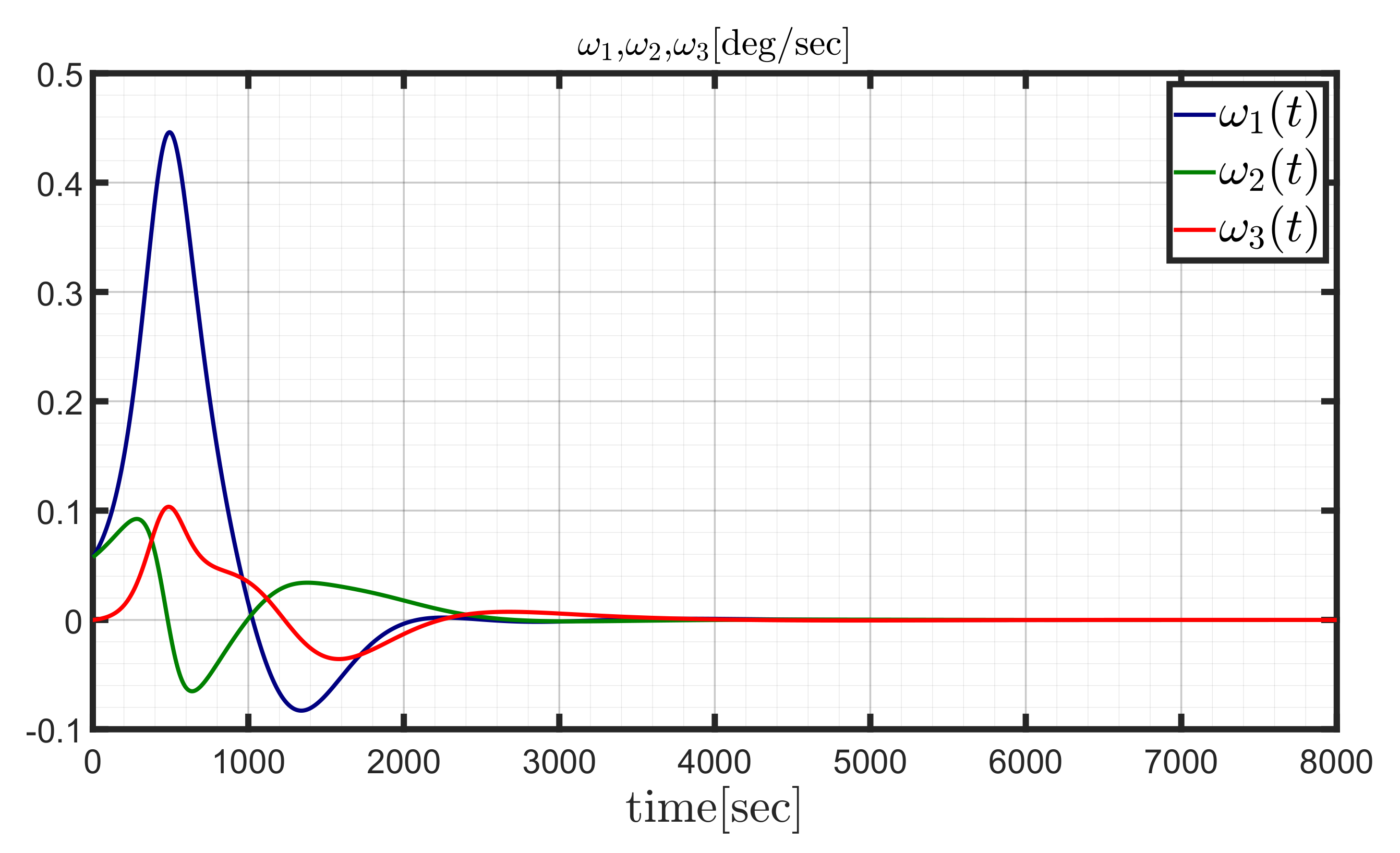
6.1. Slewing Maneuver with Ideal Actuation
- slow slewing maneuver;
- fast slewing maneuver.
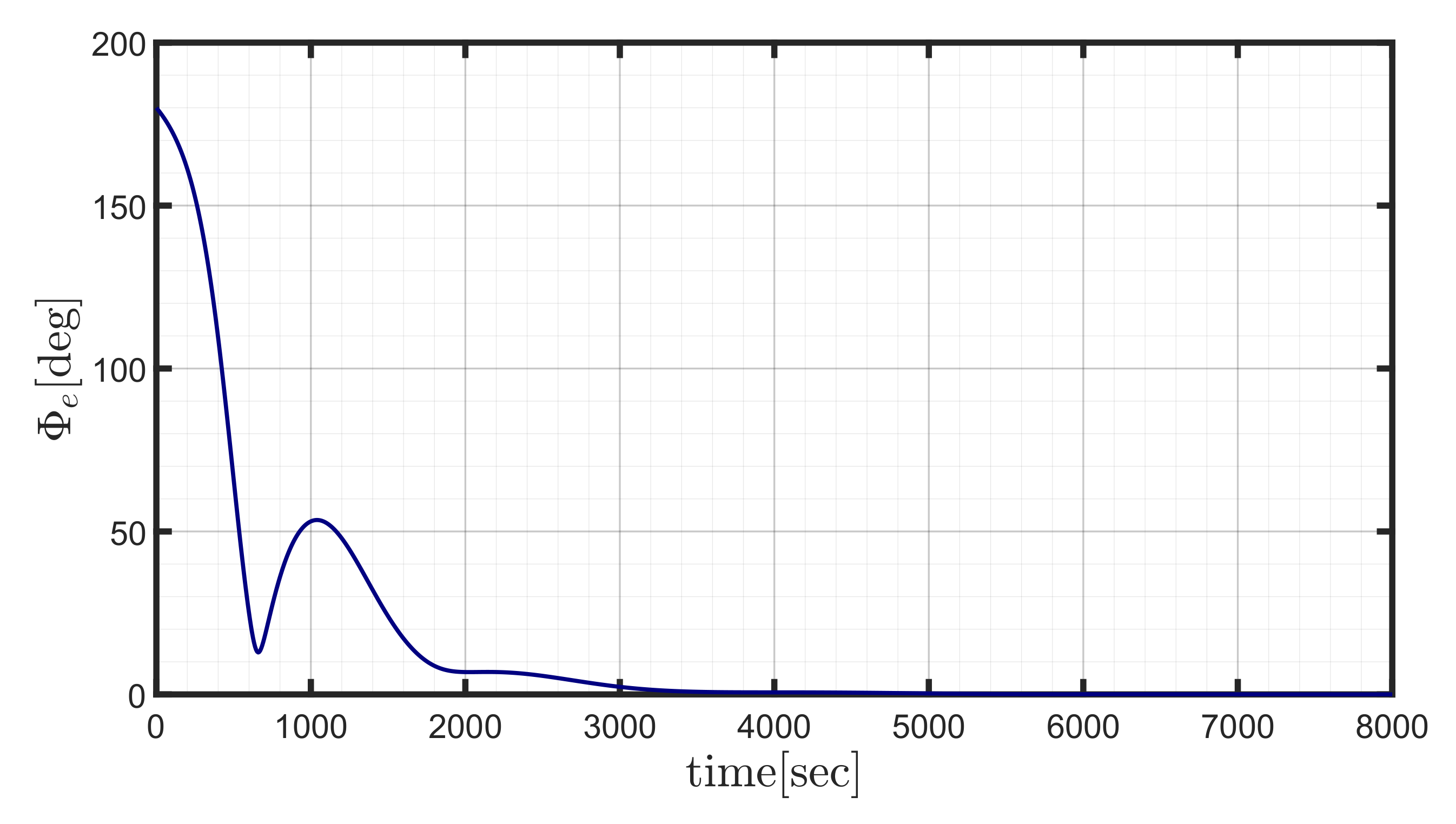
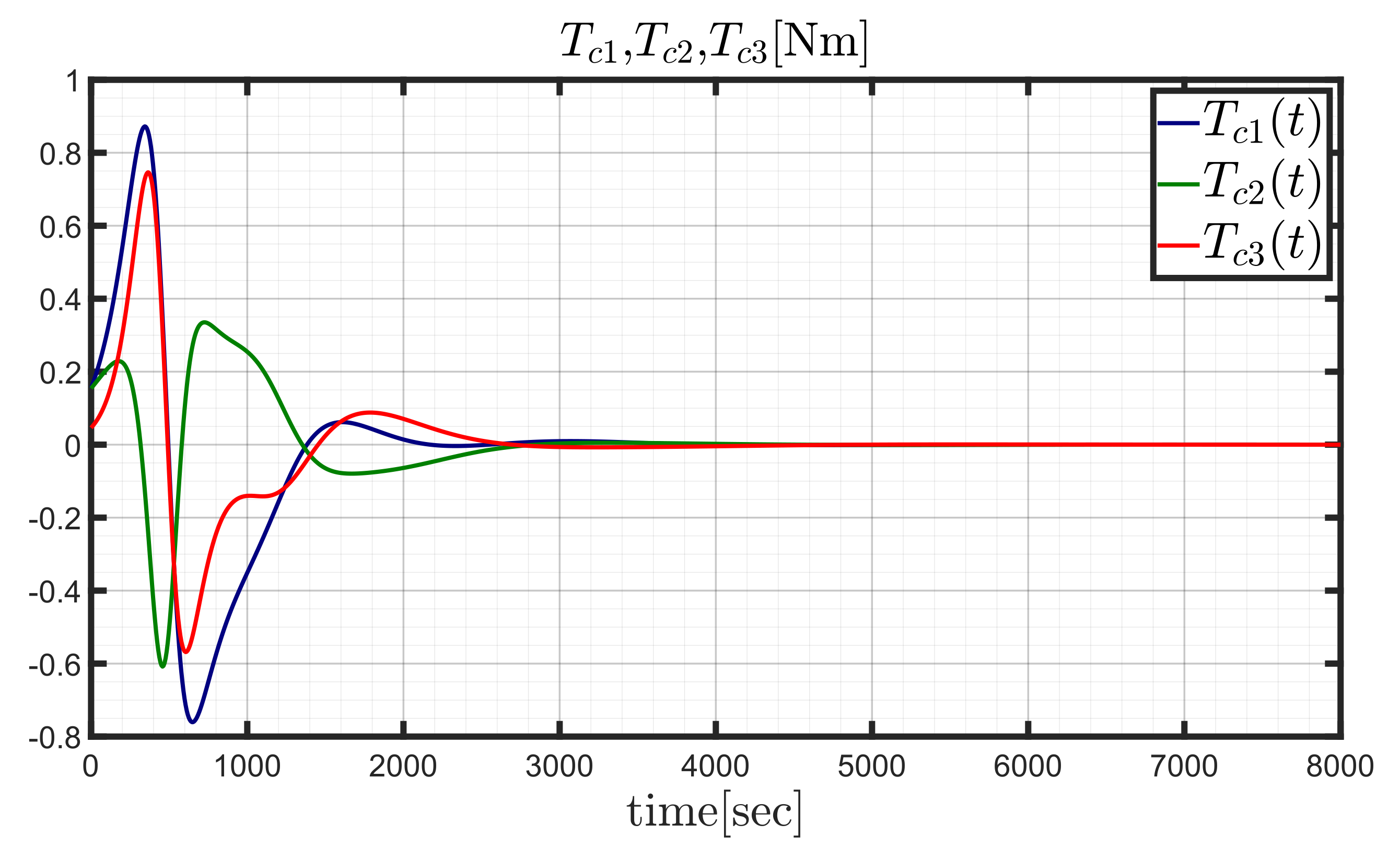
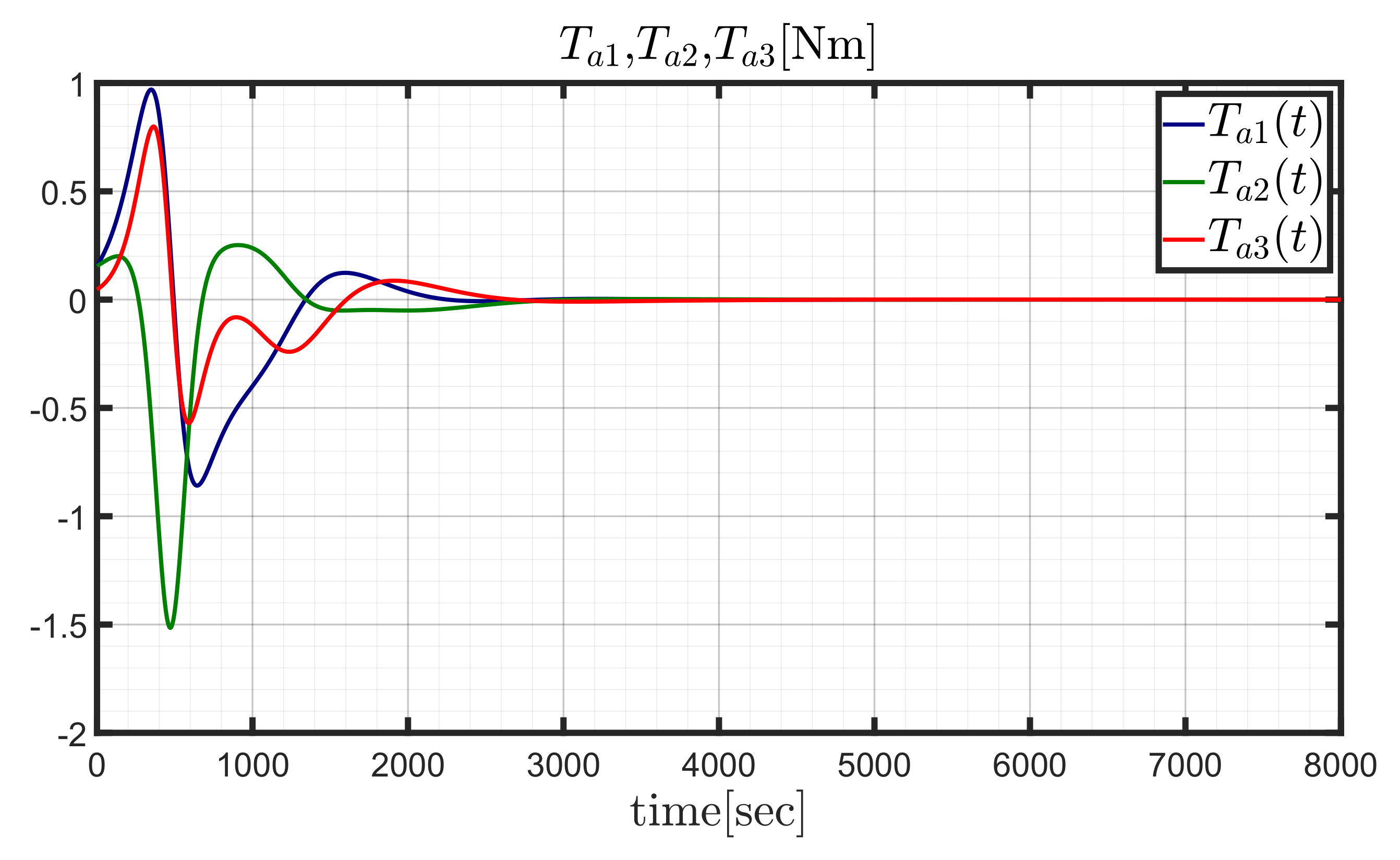
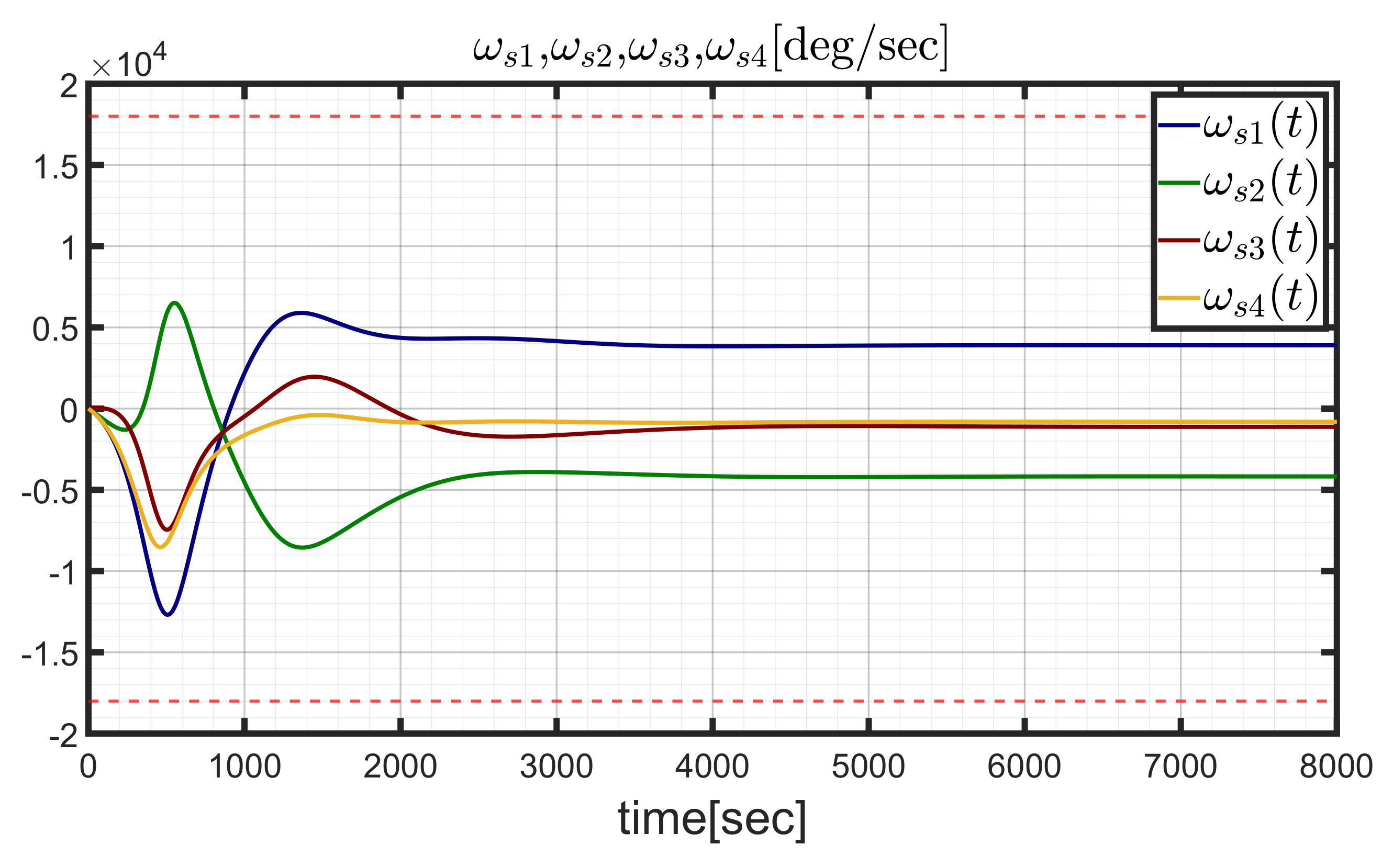
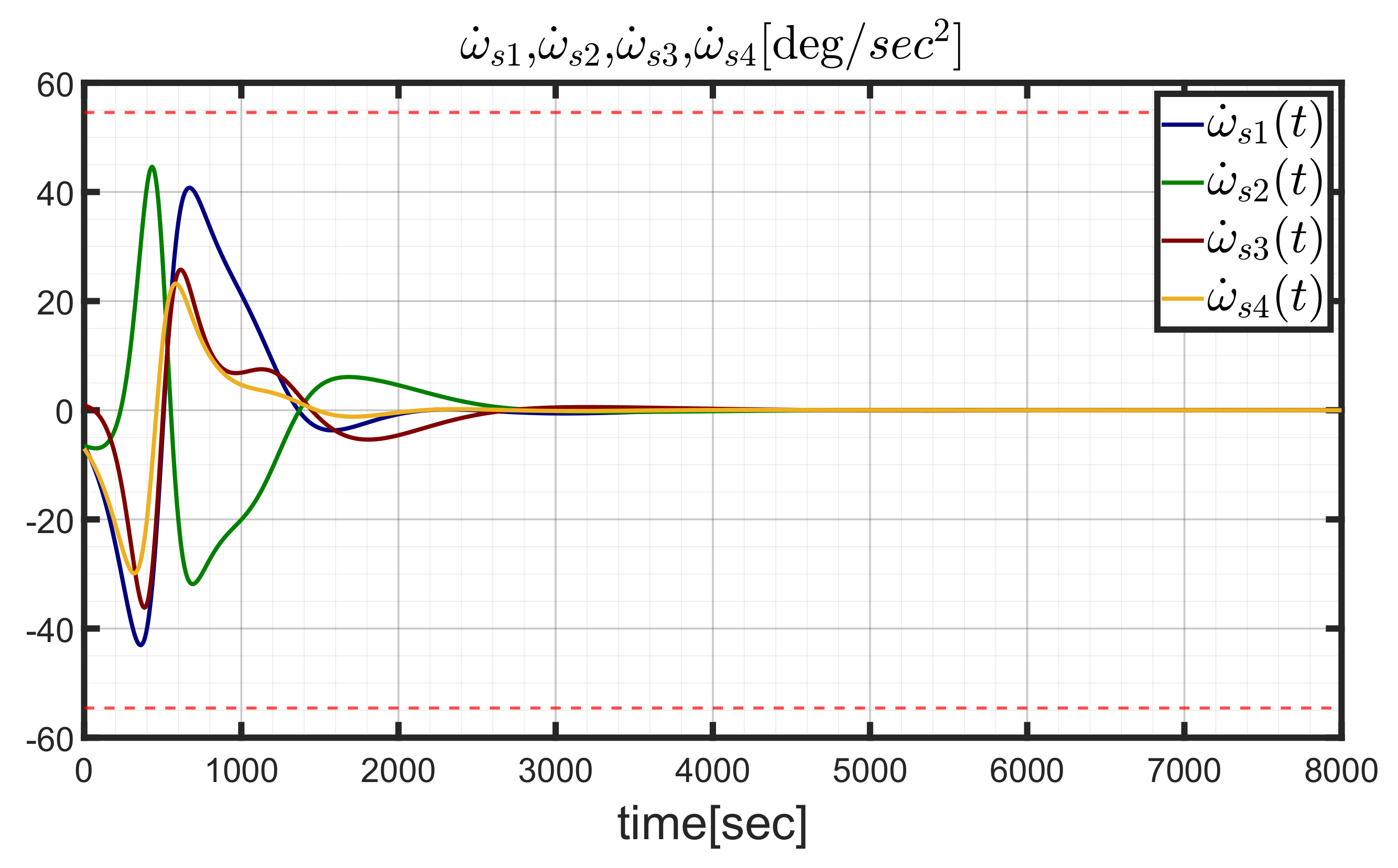
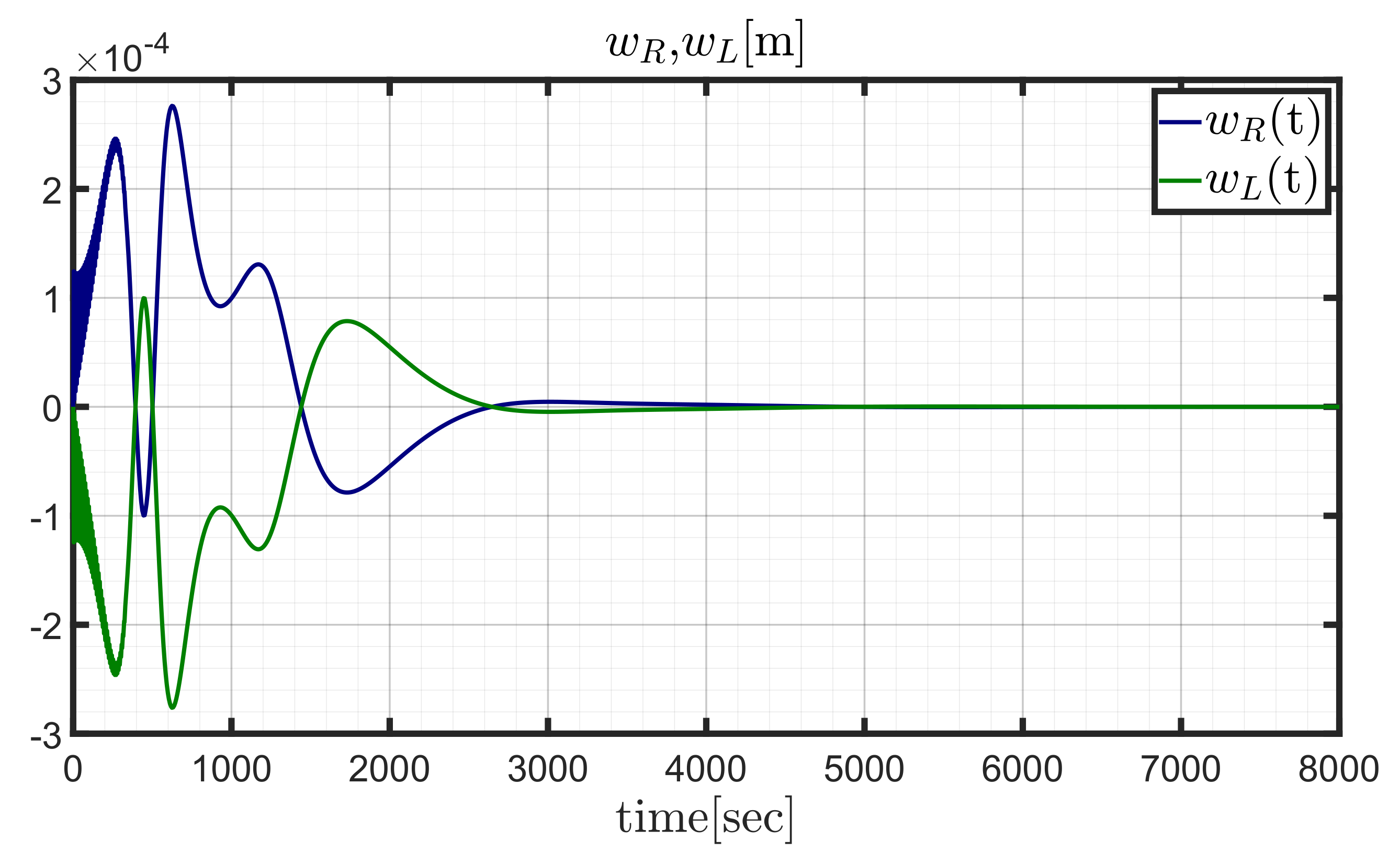
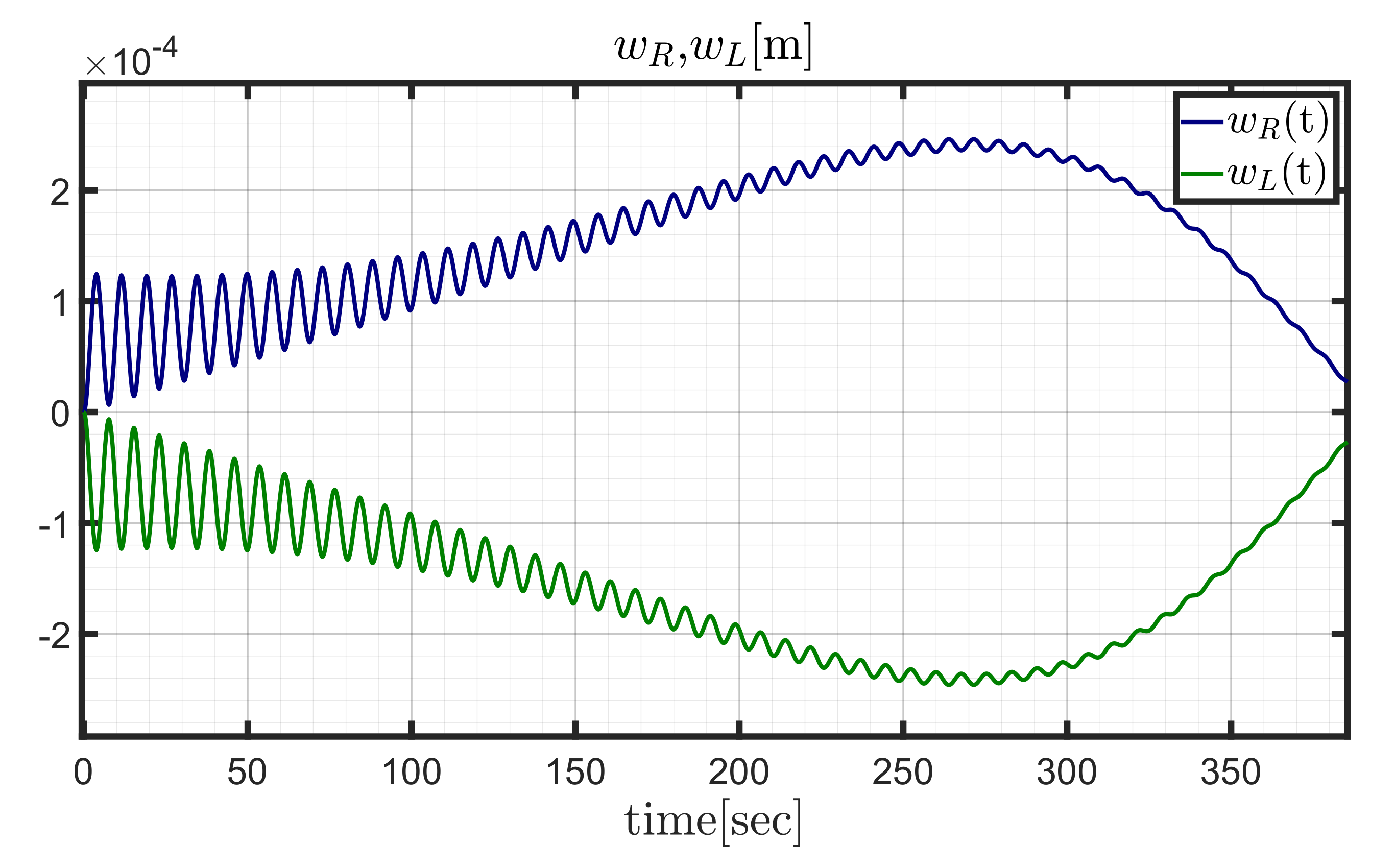
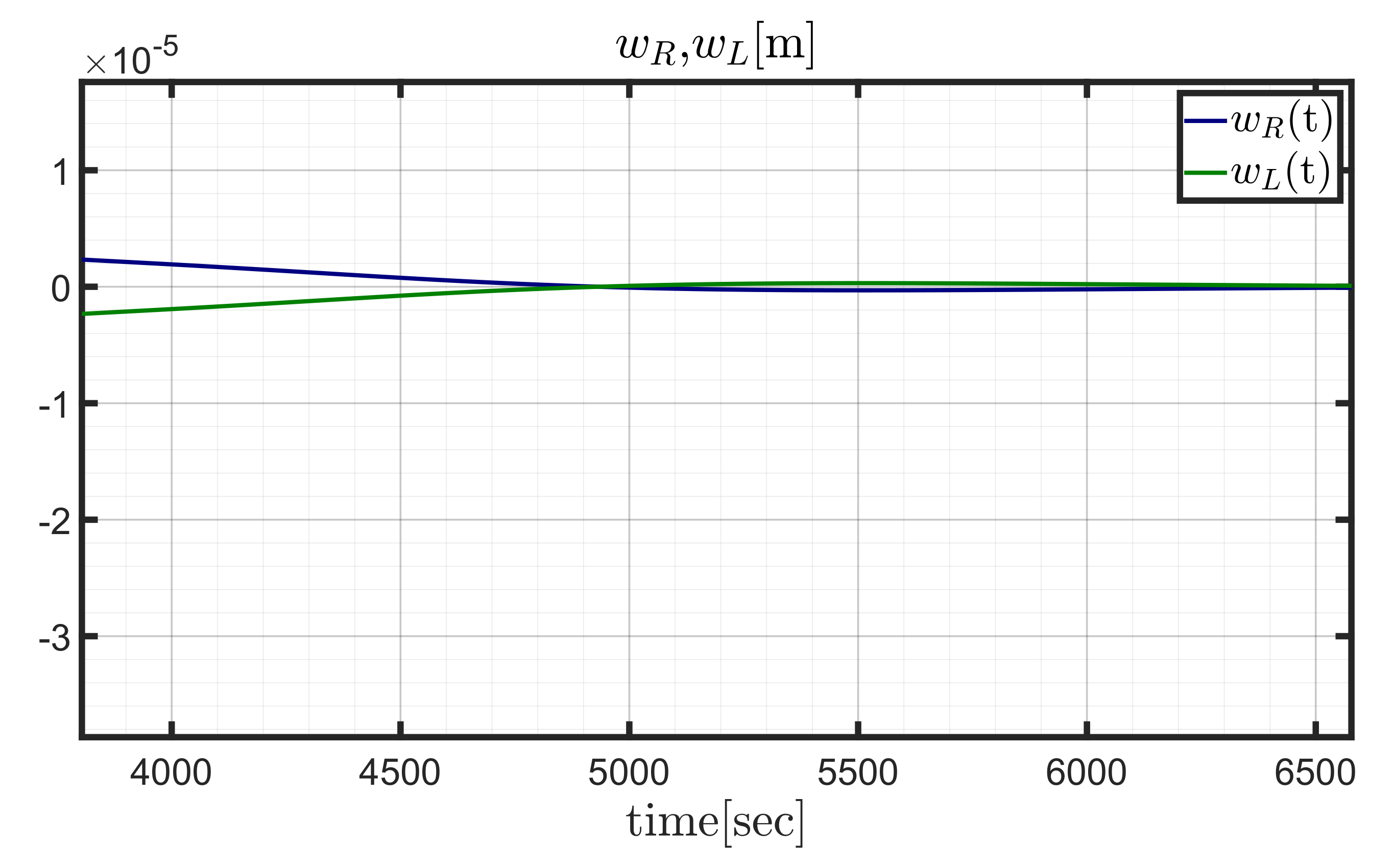
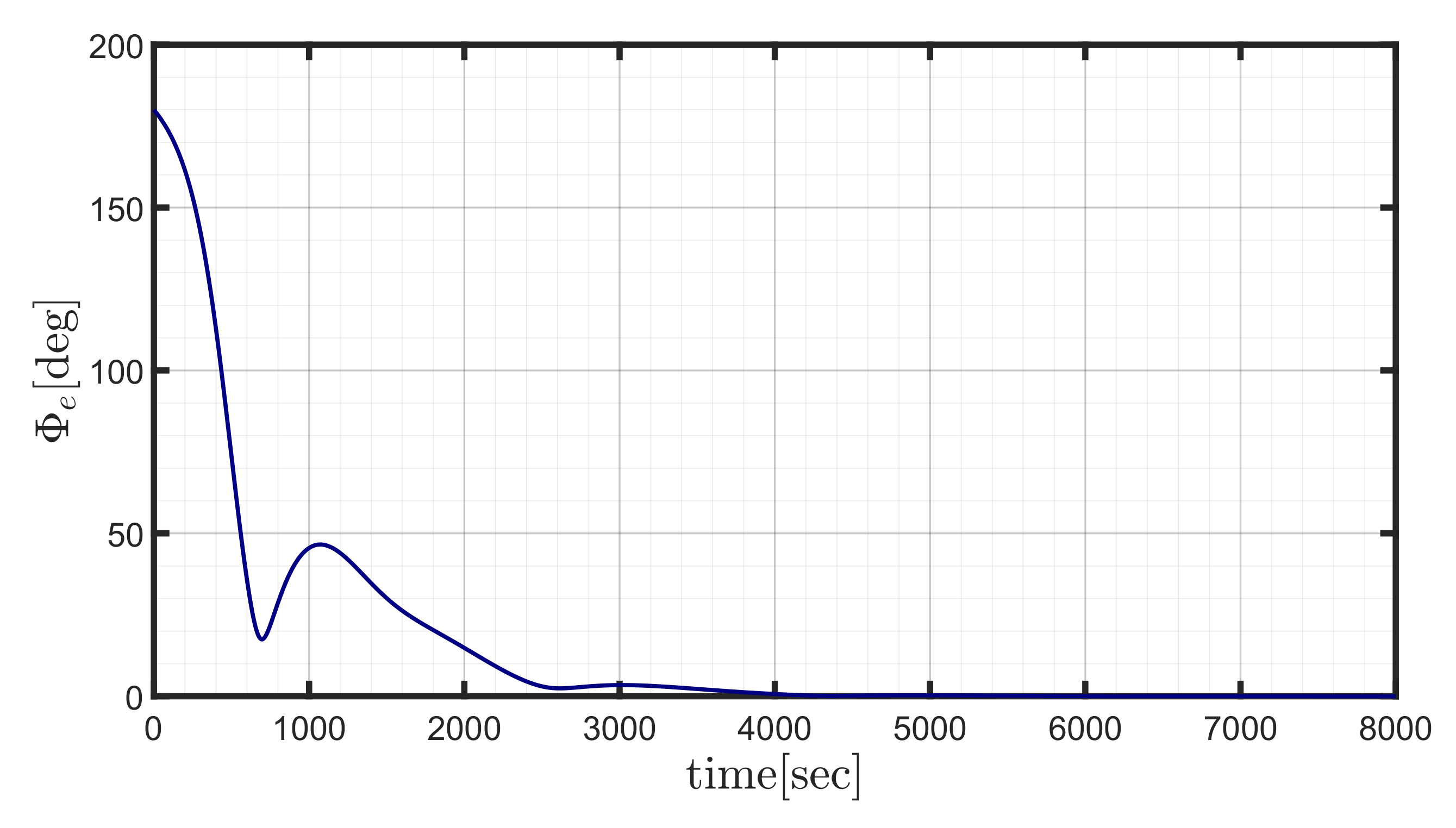
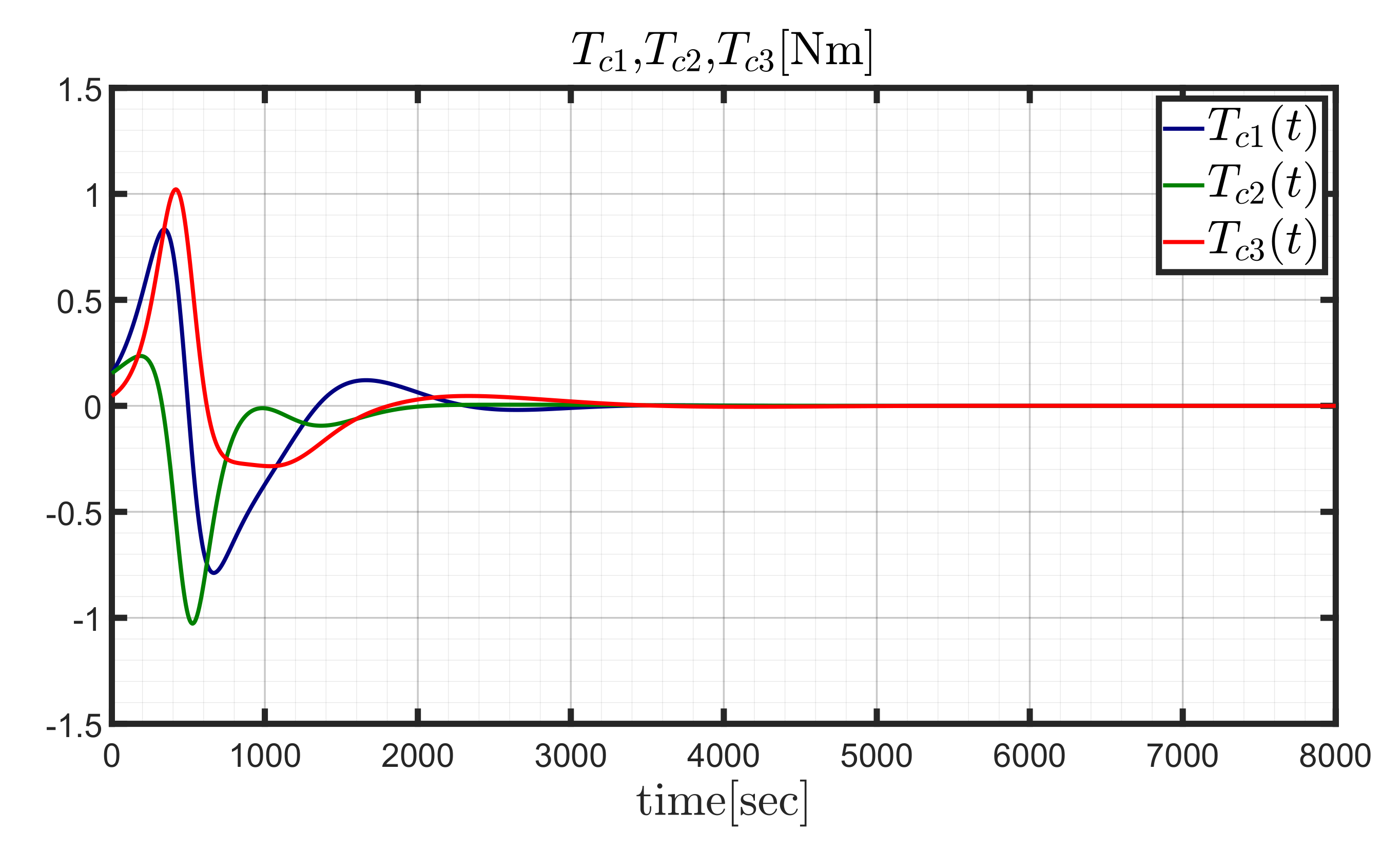
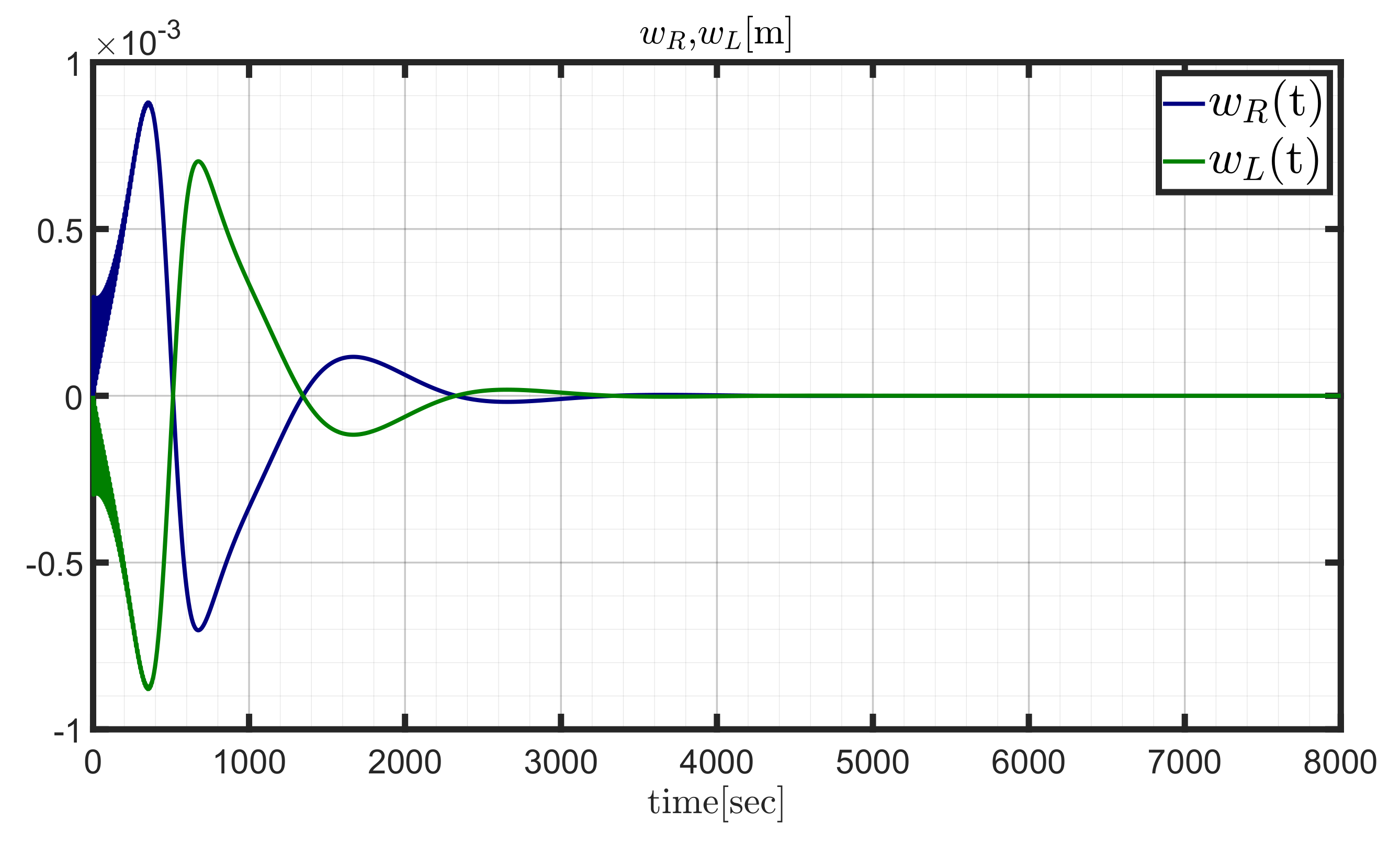
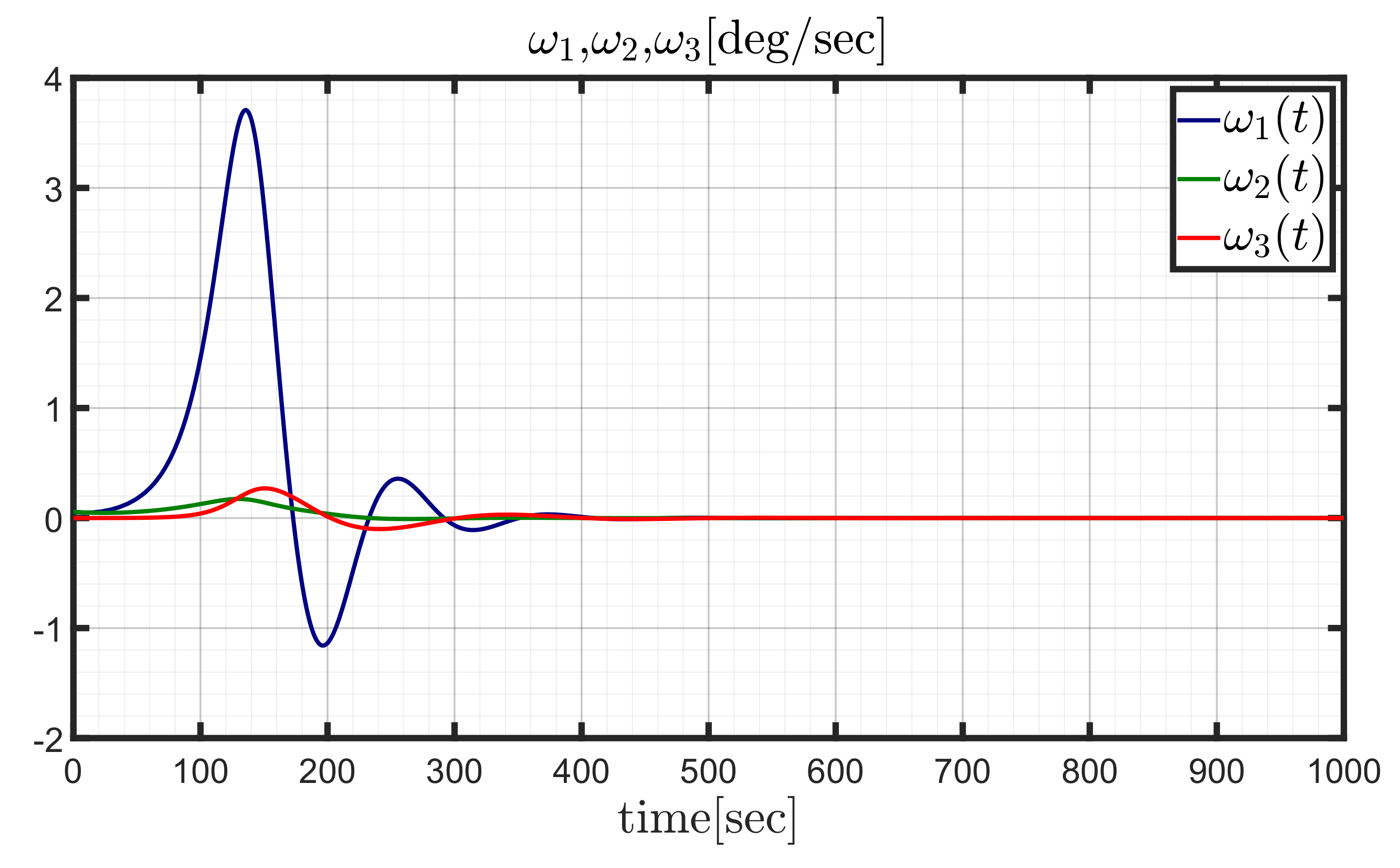
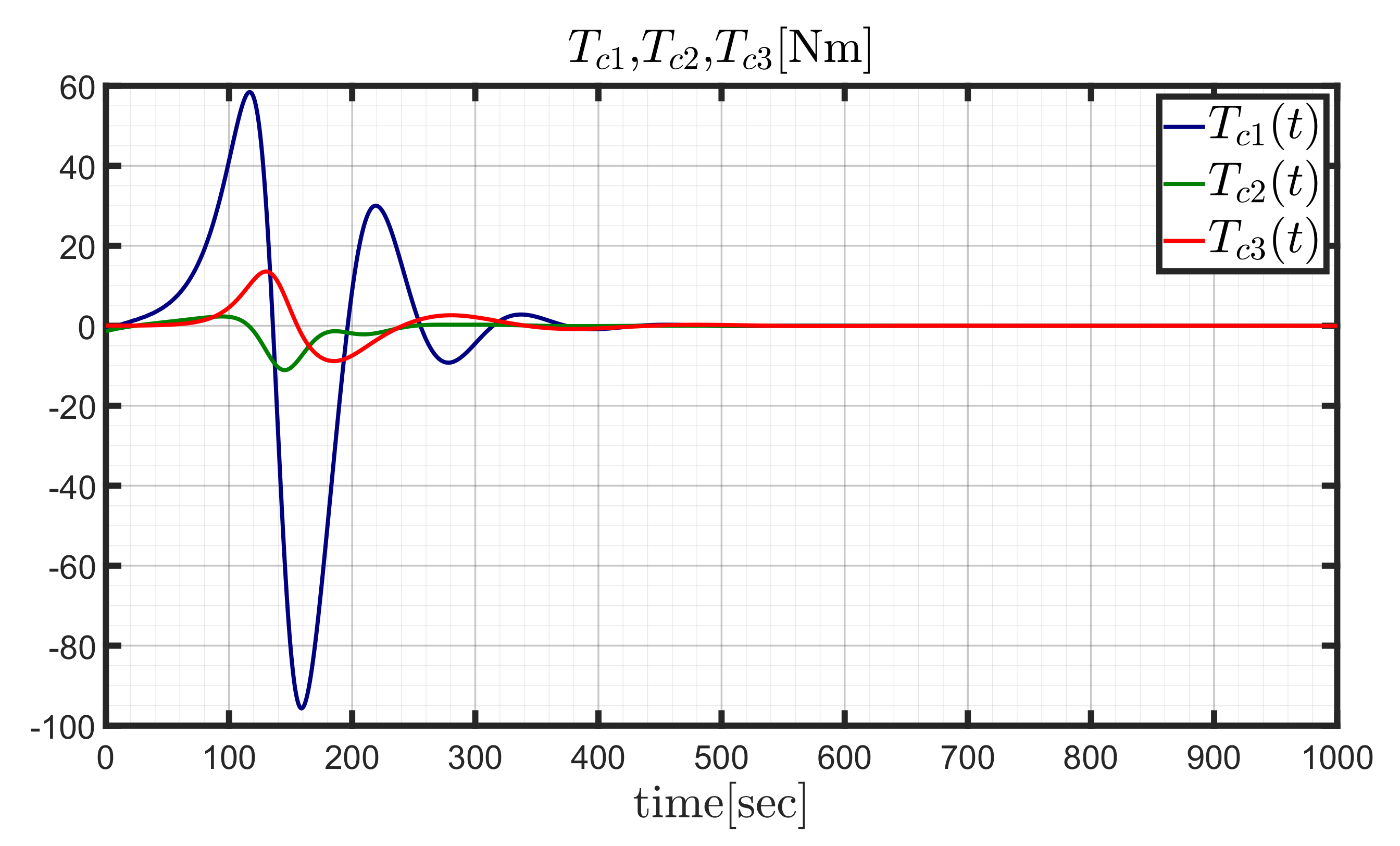
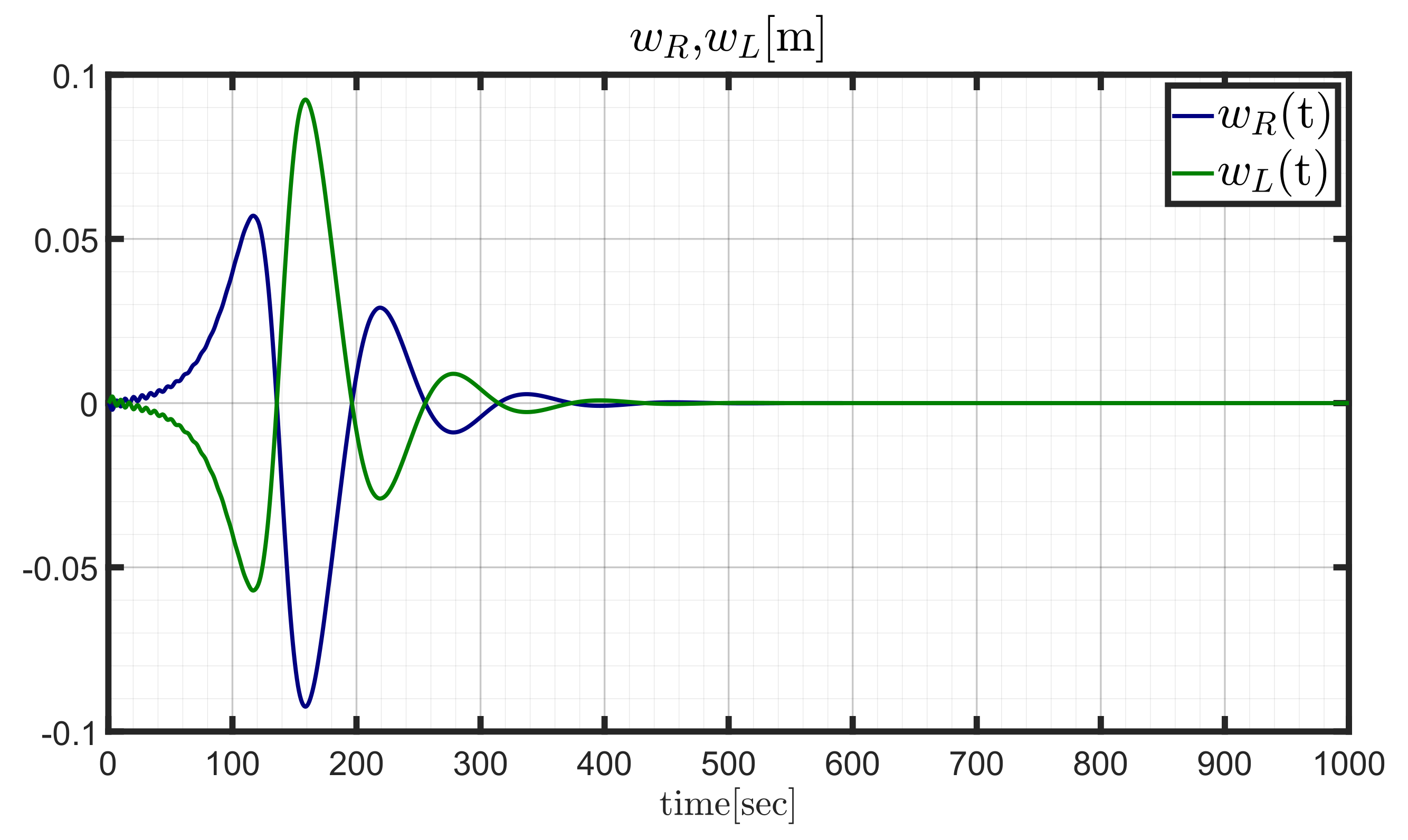
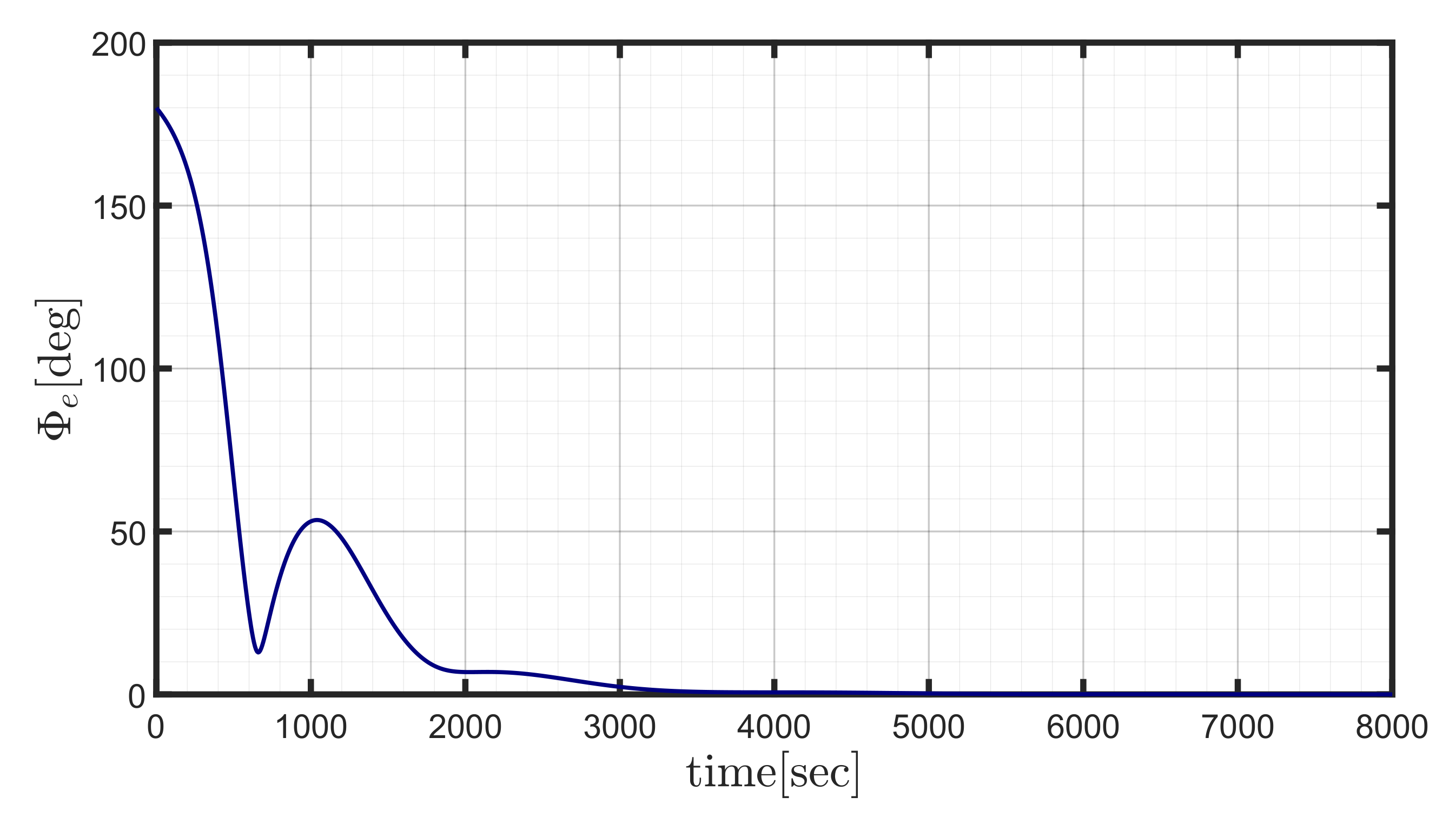
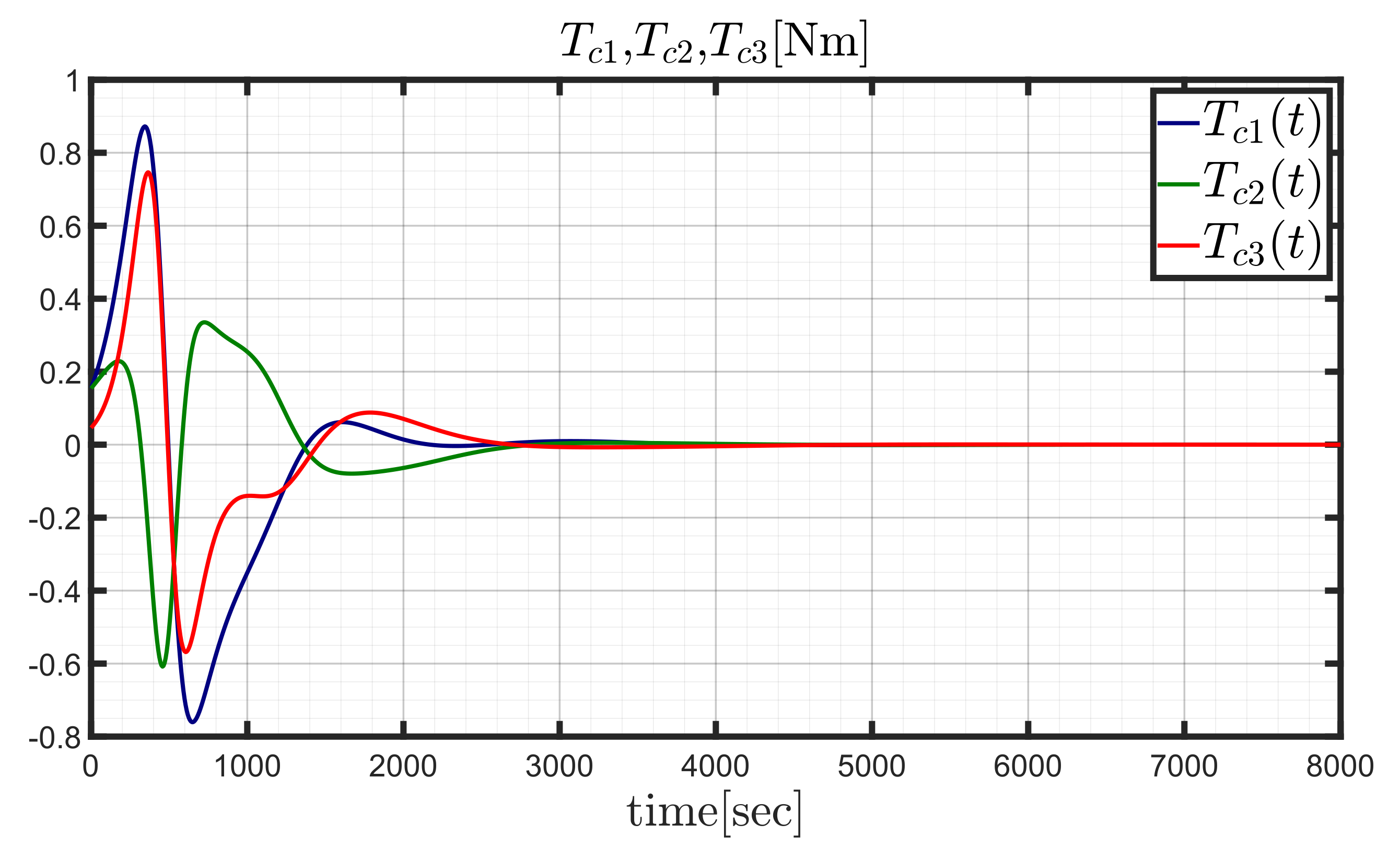
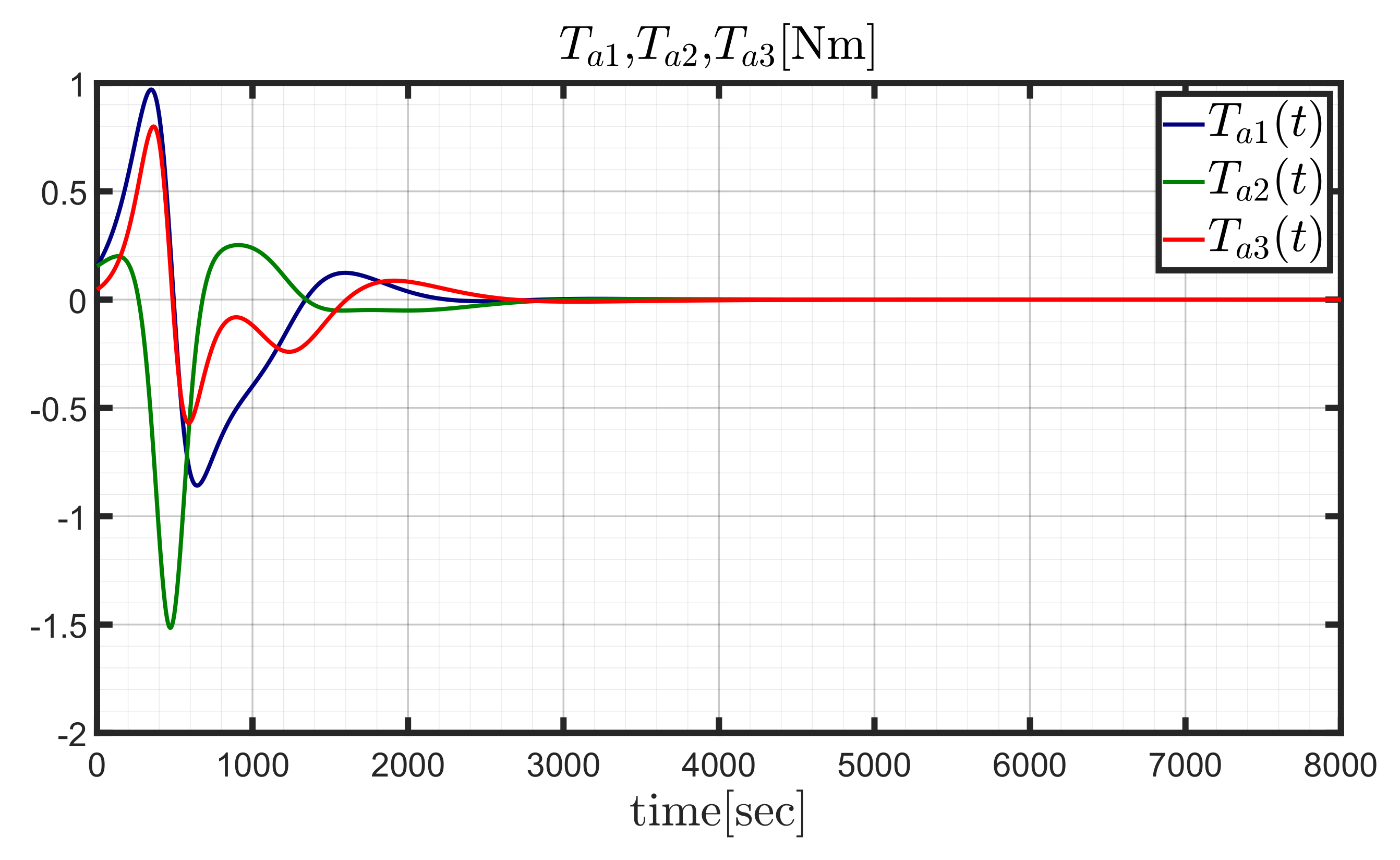
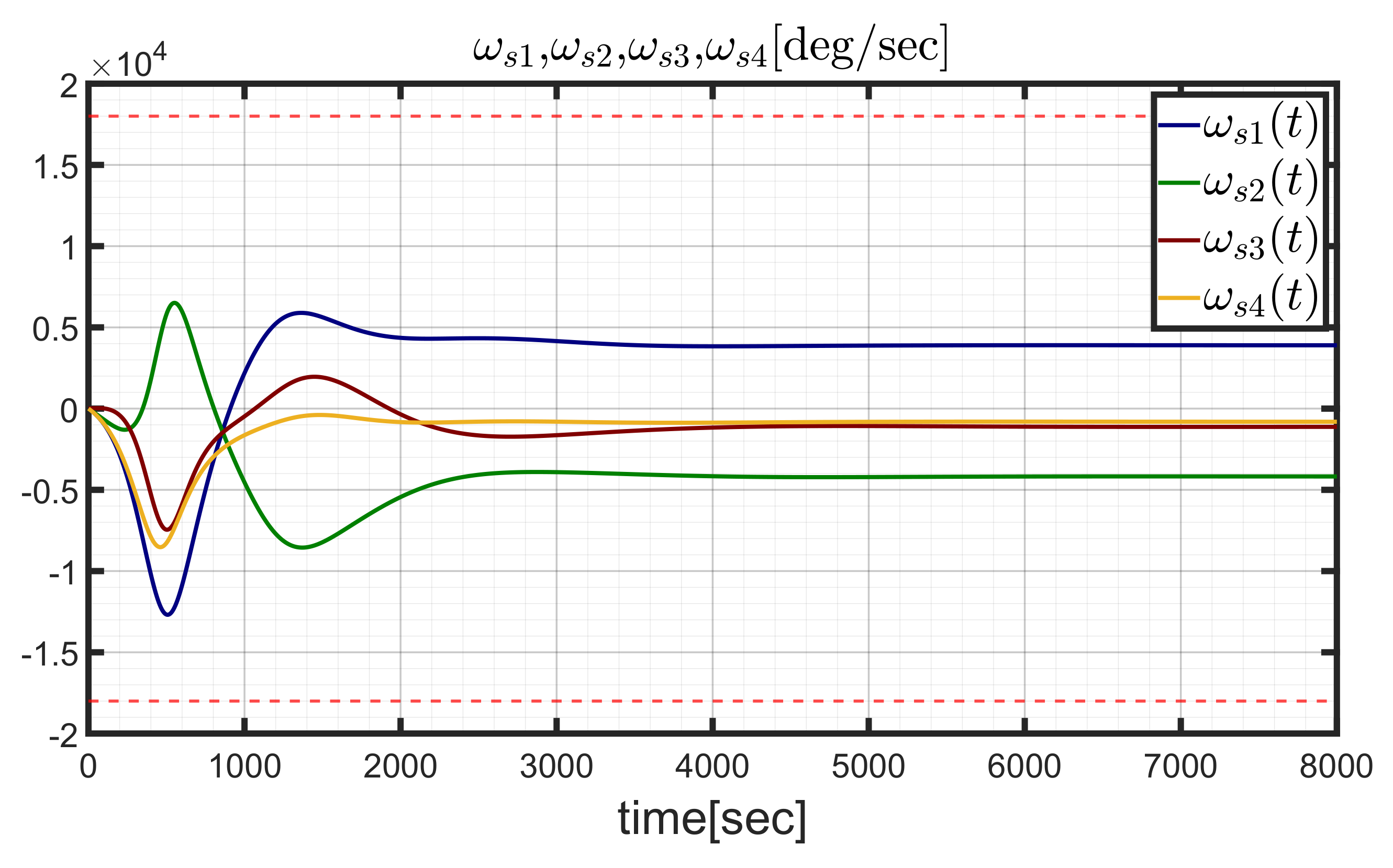
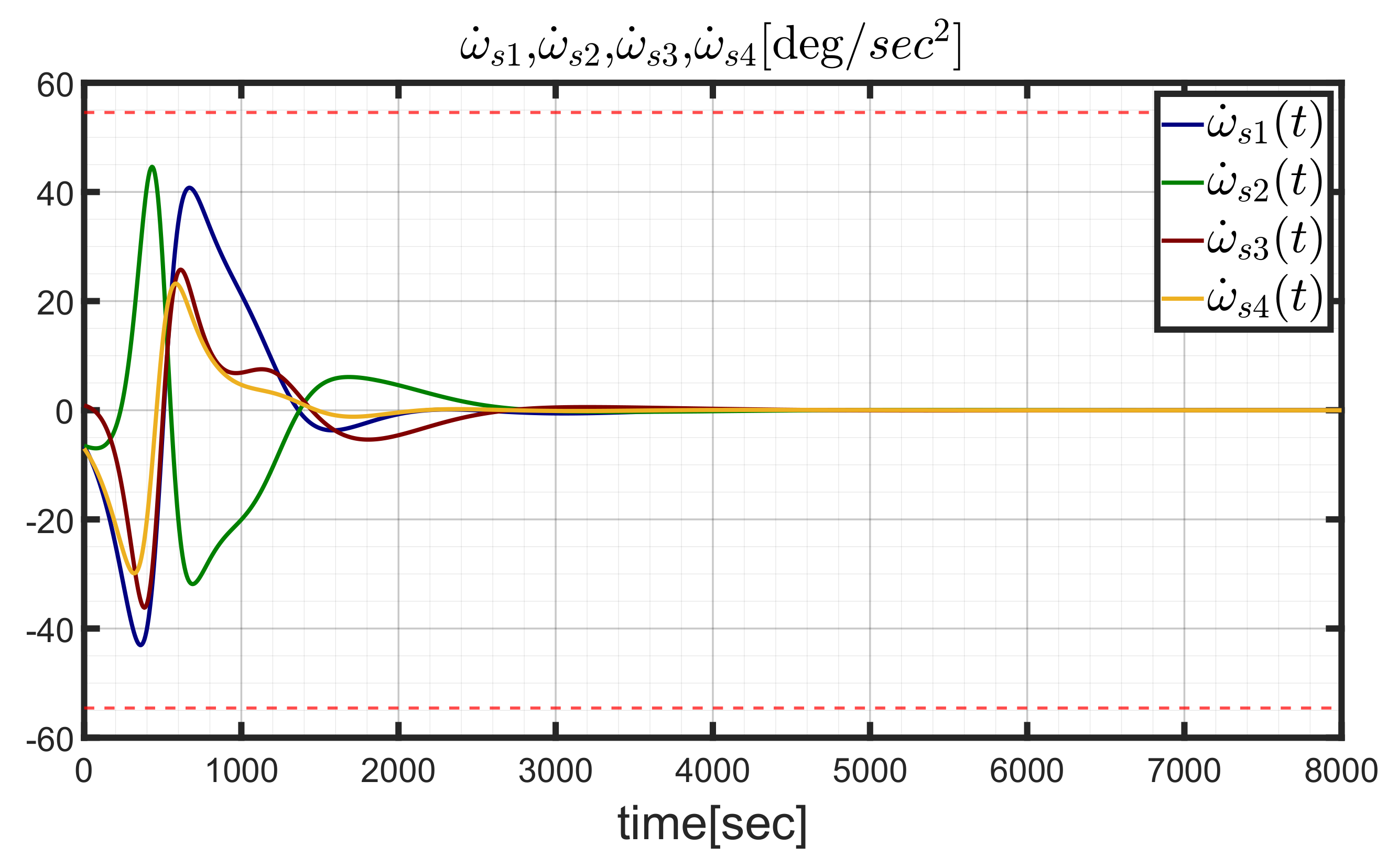
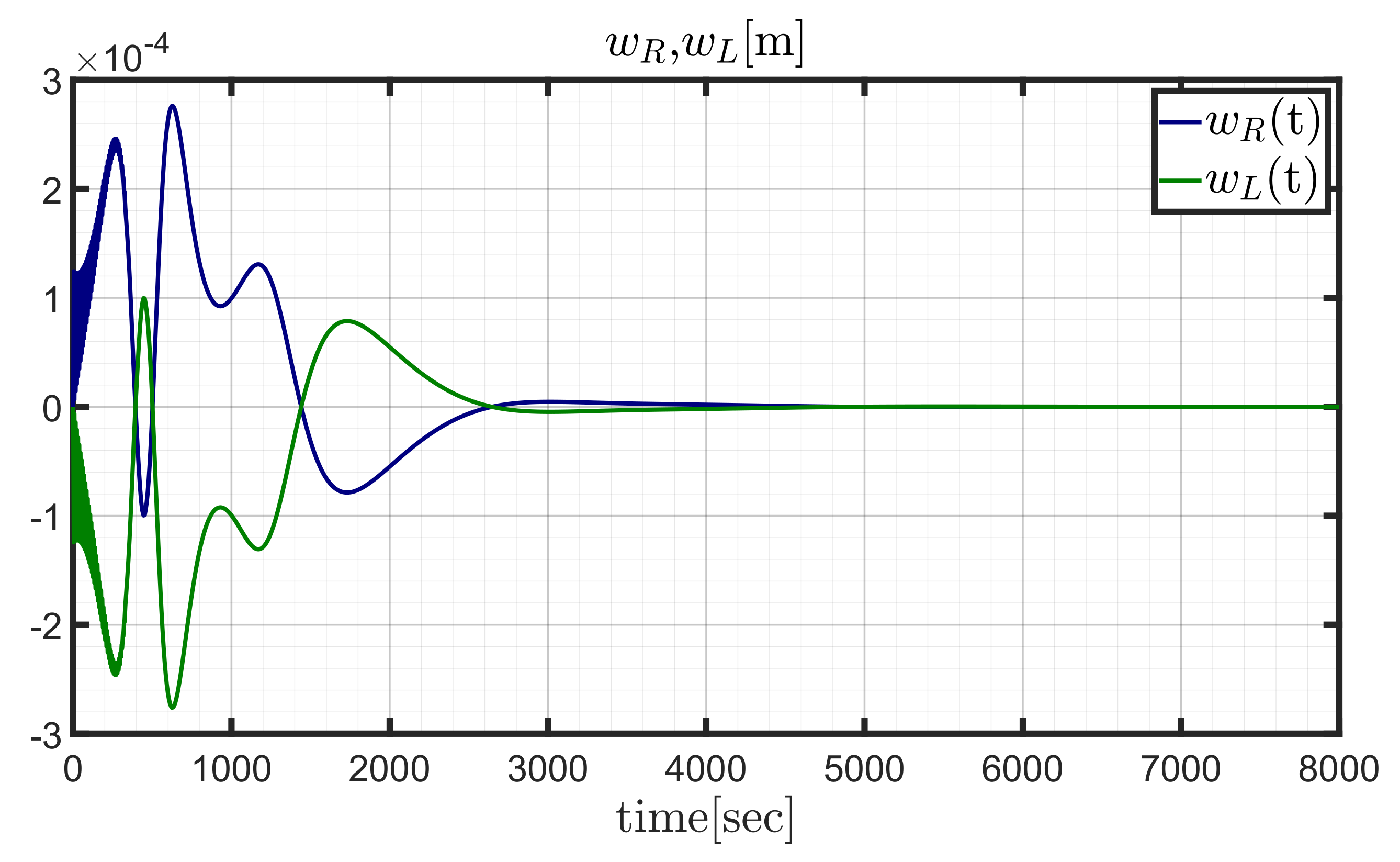
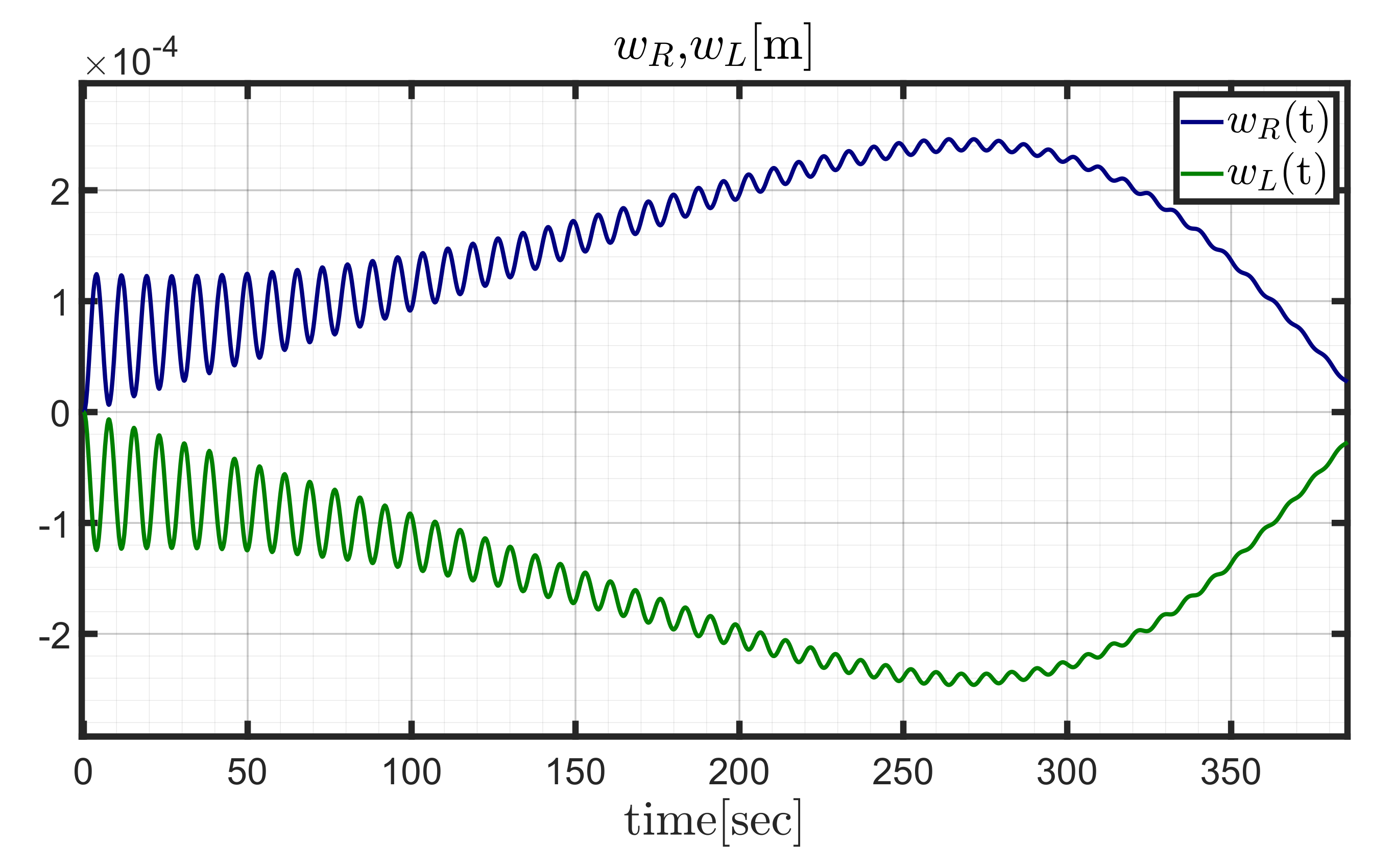
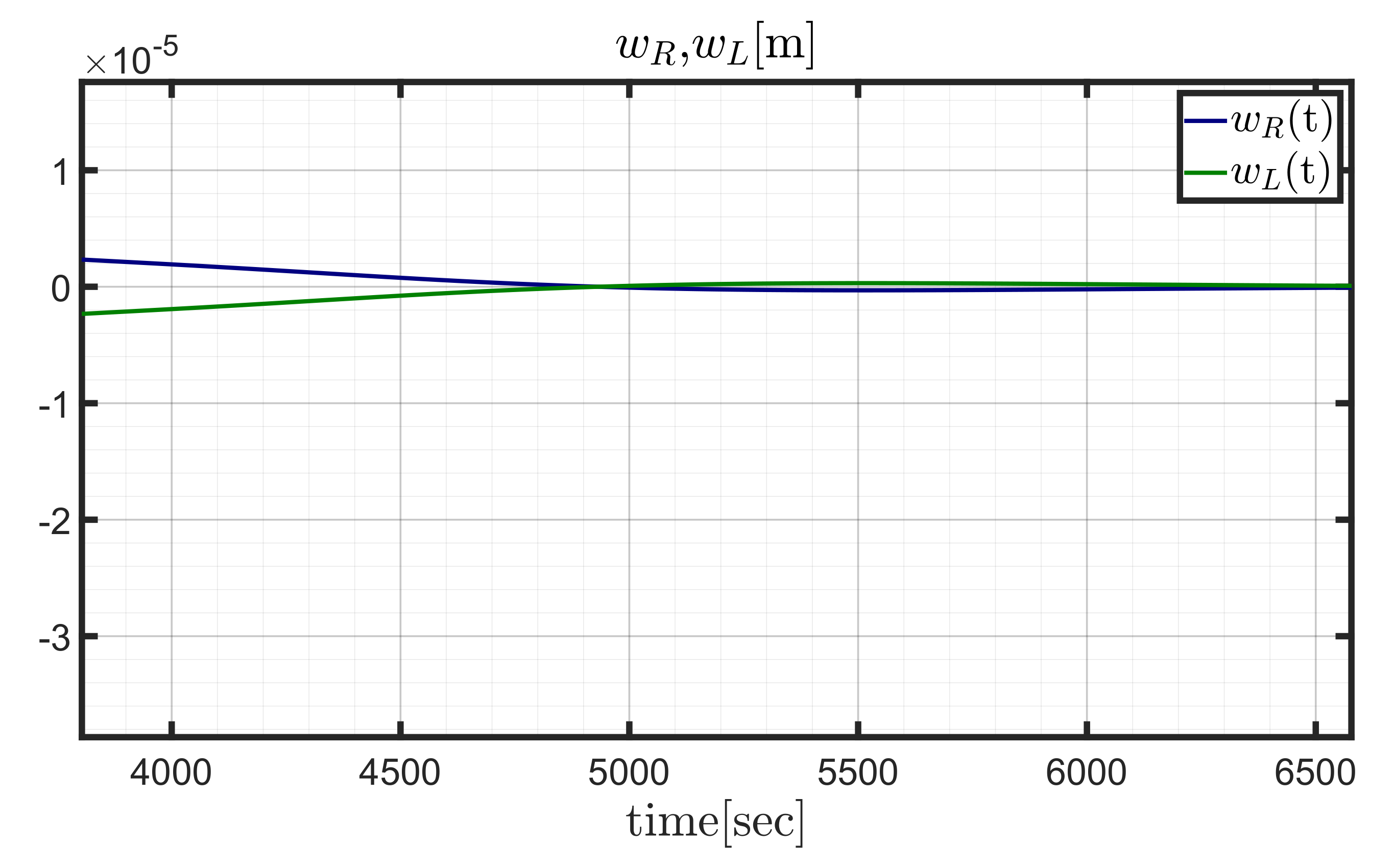
6.2. Slewing Maneuver with Actuation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| ECI | Earth Centered Inertial |
| RWs | Reaction Wheels |
References
- Wie, B.; Barba, P.M. Quaternion feedback for spacecraft large angle maneuvers. AIAA J. Guid. Control Dyn. 1985, 8, 360–365. [Google Scholar] [CrossRef]
- Weiss, H. Quaternion-based rate/attitude tracking system with application to gimbal attitude control. J. Guid. Control Dyn. 1993, 16, 609–616. [Google Scholar] [CrossRef]
- Napoli, I.; Pontani, M. A new guidance and control architecture for orbit docking using feedback linearization. In Proceedings of the 72nd International Astronautical Congress, Dubai, United Arab Emirates, 25–29 October 2021. [Google Scholar]
- Sanyal, A.; Fosbury, A.; Chaturvedi, N.; Bernstein, D.S. Inertia-free spacecraft attitude tracking with disturbance rejection and almost global stabilization. Aiaa J. Guid. Control Dyn. 2009, 32, 1167–1178. [Google Scholar] [CrossRef] [Green Version]
- Weiss, A.; Yang, X.; Kolmanovsky, I.; Bernstein, D.S. Inertia-free spacecraft attitude control with reaction-wheel actuation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Leve, F.A.; Hamilton, B.J.; Peck, M.A. Spacecraft Momentum Control Systems; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Liu, F.; Jin, D. A high-efficient finite difference method for flexible manipulator with boundary feedback control. Space Sci. Technol. 2021, 2021, 9874563. [Google Scholar] [CrossRef]
- Tahmasebi, M.; Esmailzadeh, S.M. Modeling and co-simulating of a large flexible satellites with three reaction wheels in ADAMS and MATLAB. Int. J. Dyn. Control 2018, 6, 79–88. [Google Scholar] [CrossRef]
- Cao, L.; Xiao, B.; Golestani, M. Robust fixed-time attitude stabilization control of flexible spacecraft with actuator uncertainty. Nonlinear Dyn. 2020, 100, 2505–2519. [Google Scholar] [CrossRef]
- Ford, K.A.; Hall, C.D. Flexible spacecraft reorientations using gimbaled momentum wheels. Adv. Astronaut. Sci. 1998, 97, 1895–1914. [Google Scholar] [CrossRef]
- Ford, K.A. Reorientations of Flexible Spacecraft Using Momentum Exchange Devices. Ph.D. Thesis, Department of Aeronautics and Astronautics, Air Force Institute of Technology, Wright-Patterson Air Force Base (WPAFB), Dayton, OH, USA, 1997. [Google Scholar]
- Nudehi, S.S.; Farooq, U.; Alasty, A.; Issa, J. Satellite attitude control using three reaction wheels. In Proceedings of the American Control Conference, Westin, Seattle Hotel, Seattle, WA, USA, 11–13 June 2008. [Google Scholar]
- Gasbarri, P.; Monti, R.; Sabatini, M. Very large space structures: Nonlinear control and robustness to structural uncertainties. Acta Astronaut. 2014, 93, 252–265. [Google Scholar] [CrossRef]
- Gasbarri, P.; Monti, R.; De Angelis, C.; Sabatini, M. Effects of uncertainties and flexible dynamic contributions on the control of a spacecraft full-coupled model. Acta Astronaut. 2014, 94, 515–526. [Google Scholar] [CrossRef]
- Angeletti, F.; Iannelli, P.; Gasbarri, P.; Sabatini, M. End-to-end design of a robust attitude control and vibration suppression system for large space smart structures. Acta Astronaut. 2021, 187, 416–428. [Google Scholar] [CrossRef]
- Gasbarri, P. A two-dimensional approach to multibody free dynamics in space environment. Acta Astronaut. 2002, 51, 831–842. [Google Scholar] [CrossRef]
- Santini, P.; Gasbarri, P. General background and approach to multibody dynamics for space applications. Acta Astronaut. 2009, 64, 1224–1251. [Google Scholar] [CrossRef]
- Gasbarri, P.; Sabatini, M.; Pisculli, A. Dynamic modeling and stability parametric analysis of a flexible spacecraft with fuel slosh. Acta Astronaut. 2016, 127, 141–159. [Google Scholar] [CrossRef]
- Nurre, G.S.; Sharkey, J.P.; Nelson, J.D.; Bradley, A.J. Preservicing mission, on-orbit modifications to Hubble Space Telescope pointing control system. AIAA J. Guid. Control Dyn. 1995, 18, 222–229. [Google Scholar] [CrossRef]
- Pontani, M. Lecture Notes of the Course “Advanced Spacecraft Dynamics”; Sapienza Università di Roma: Rome, Italy, 2021. [Google Scholar]
- Hughes, P.C. Spacecraft Attitude Dynamics; Wiley: New York, NY, USA, 1986; Reprint Dover: New York, NY, USA, 2008. [Google Scholar]
- Beals, G.A.; Crum, R.C.; Dougherty, H.J.; Hegel, D.K.; Kelley, J.L.; Rodden, J.J. Hubble Space Telescope precision pointing control system. AIAA J. Guid. Control Dyn. 1988, 11, 119–123. [Google Scholar] [CrossRef]
- Pisculli, A.; Gasbarri, P. A minimum state multibody/FEM approach for modeling flexible orbiting space systems. Acta Astronaut. 2015, 110, 324–340. [Google Scholar] [CrossRef]
- Posani, M. Nonlinear Attitude Control of Complex Space Systems. Master’s Thesis, Sapienza Università di Roma, Rome, Italy, 2021. [Google Scholar]
- Cruz, G.; Yang, X.; Weiss, A.; Kolmanovsky, I.; Bernstein, D.S. Torque-saturated, inertia-free spacecraft attitude control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m [kg] | L [m] | h[m] | [m] |
|---|---|---|---|
| 81 | 15 | 1.0 | 2.5 × |
| [rad/sec] | [rad/sec] | [rad/sec] |
|---|---|---|
| 0.7138 | 4.4711 | 12.5192 |
| [rpm] | [kg m] | [Nm] |
|---|---|---|
| 3000 | 0.84 | 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Posani, M.; Pontani, M.; Gasbarri, P. Nonlinear Slewing Control of a Large Flexible Spacecraft Using Reaction Wheels. Aerospace 2022, 9, 244. https://doi.org/10.3390/aerospace9050244
Posani M, Pontani M, Gasbarri P. Nonlinear Slewing Control of a Large Flexible Spacecraft Using Reaction Wheels. Aerospace. 2022; 9(5):244. https://doi.org/10.3390/aerospace9050244
Chicago/Turabian StylePosani, Massimo, Mauro Pontani, and Paolo Gasbarri. 2022. "Nonlinear Slewing Control of a Large Flexible Spacecraft Using Reaction Wheels" Aerospace 9, no. 5: 244. https://doi.org/10.3390/aerospace9050244
APA StylePosani, M., Pontani, M., & Gasbarri, P. (2022). Nonlinear Slewing Control of a Large Flexible Spacecraft Using Reaction Wheels. Aerospace, 9(5), 244. https://doi.org/10.3390/aerospace9050244