
Trim Flap System Design for Improving Ballistic-Lifting Entry Performance of the Tianwen-1 Mars Probe


Abstract
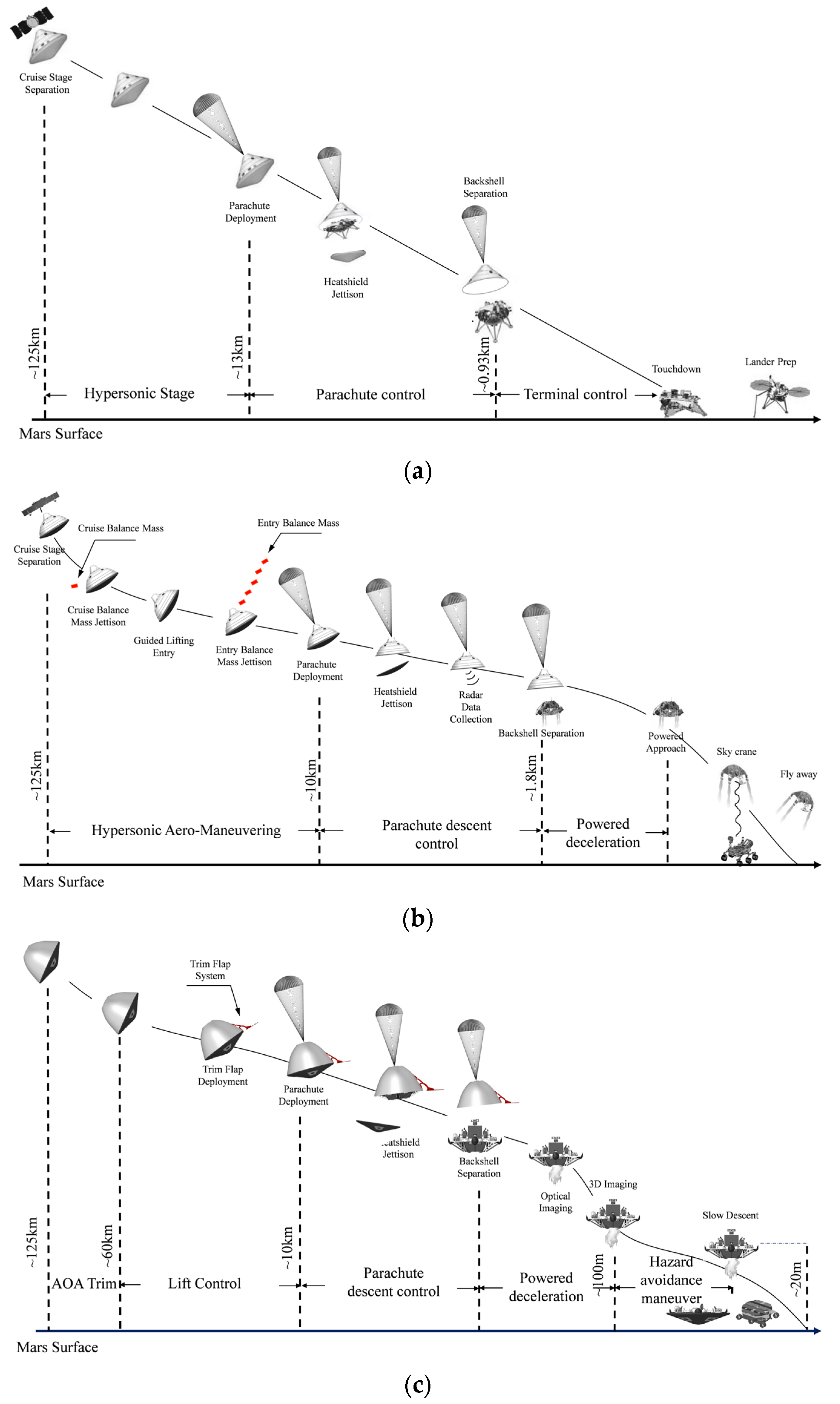
:1. Introduction
2. Structure Design of the Trim Flap System
2.1. Design Requirement
- 1.
- One of the most fundamental design requirements was being able to deploy within 1.5 s. A time of 1.5 s was chosen as the deployment time () in order to minimize aerodynamic disturbances to Mars entry vehicles;
- 2.
- The flap panel deployed quickly in the Martian atmosphere at the hypersonic condition, at which time, the prevailing dynamic pressure exerted a counter force on the flap panel, preventing it from deploying. The driving force should be large enough to overcome this resistance and deploy the flap panel to its fully deployed position within 1.5 s;
- 3.
- A high-speed impact between the flap panel and the backshell as a result of a high-speed deployment should be eliminated [16];
- 4.
- Once fully deployed, the flap panel should remain in the full deployed configuration to withstand entry aerodynamic loads;
- 5.
- Other considerations included thermal protection, strength and stiffness, non-geometric interference with backshell and other components, etc.
2.2. Structure Description
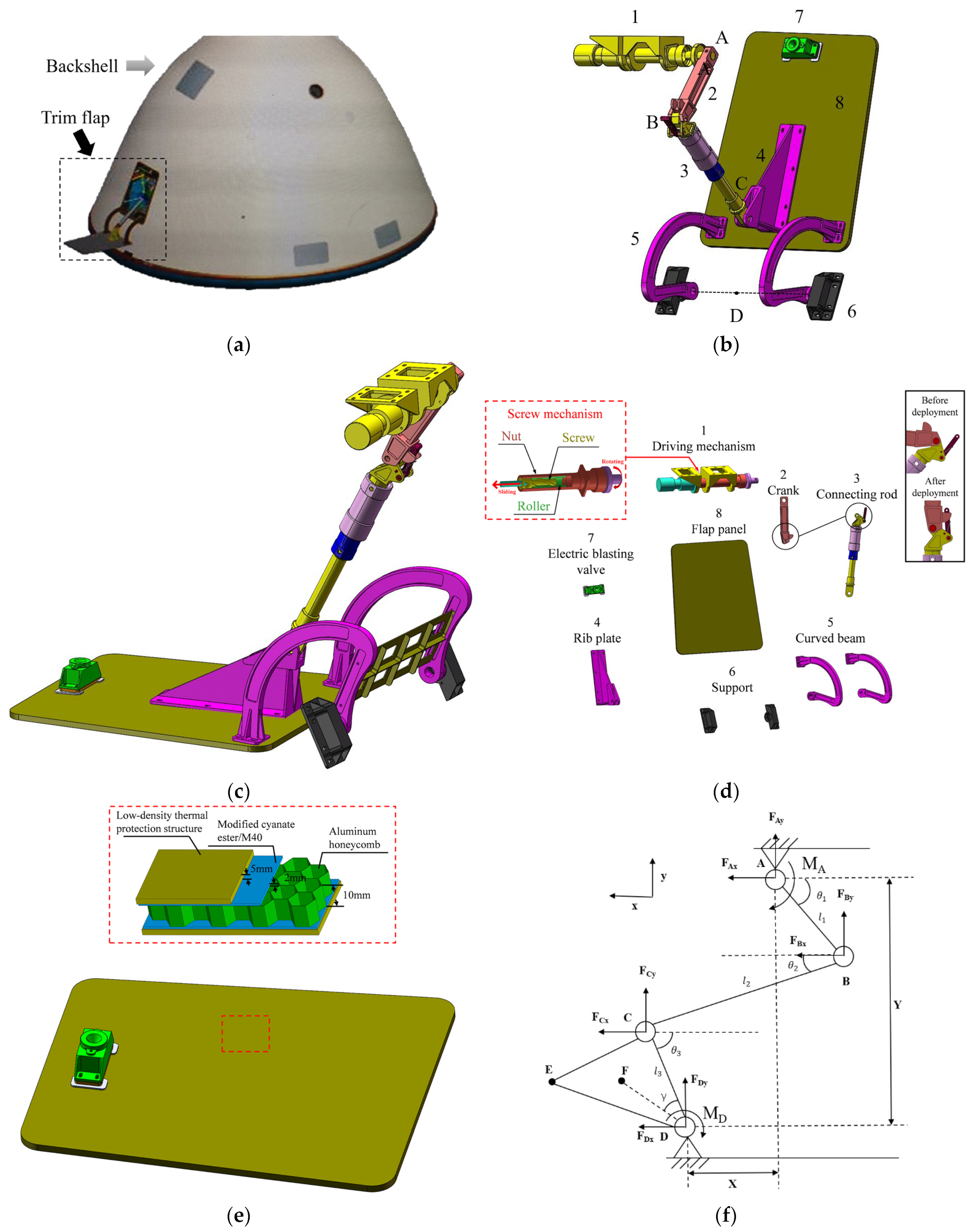
2.2.1. Schematic Diagram
2.2.2. Four-Bar Mechanism
2.2.3. Driving Mechanism
2.2.4. Deployment Process
- The deployment was initiated exo-atmospherically with the firing of the electric blasting valve that released the preloaded launch lock interface;
- This was immediately followed by the valve of the gas cylinder being opened, the gas flowing into the pneumatic piston, and the air pressure creating an actuating force on the piston to drive the crank rotation through the screw mechanism;
- After the crank was actuated, based on the characteristic of the crank–rocker mechanism, the flap panel was driven to deploy to its fully deployed position;
- When the flap panel reached the position perpendicular to the symmetry axis of the backshell (as shown in Figure 3a), corresponding to the dead point of the crank–rocker mechanism, the flap panel would be locked with a self-lock mechanism as highlighted in Figure 3d and remained in its fully deployed status to withstand aerodynamic load during entry.
2.2.5. Material Selection
3. Theoretical Model and FE Model
3.1. Theoretical Model
3.1.1. Kinematic and Dynamic Analysis
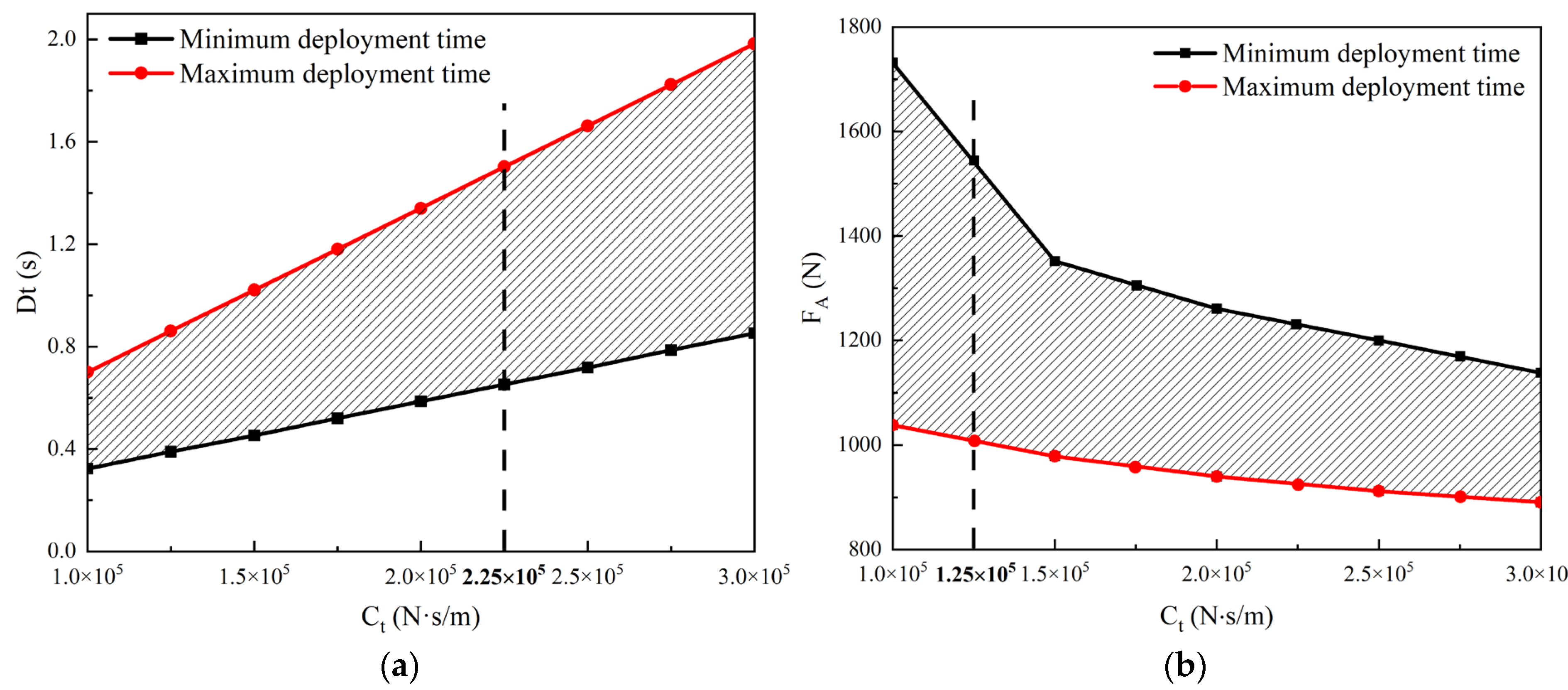
3.1.2. Parametric Analysis
- (1)
- Minimum condition: external loads were a combination of P of 30 MPa and a minimum of 9 N·m/rad, corresponding to the fastest deployment process.
- (2)
- Maximum condition: Considering the harsh environment in Mars exploration missions, P might drop from 30 to 15 MPa due to an extremely low temperature and gas leakage. Under the maximum condition, P of 15 MPa and maximum of 51.6 N·m/rad were used for the external loads, corresponding to the slowest deployment process.
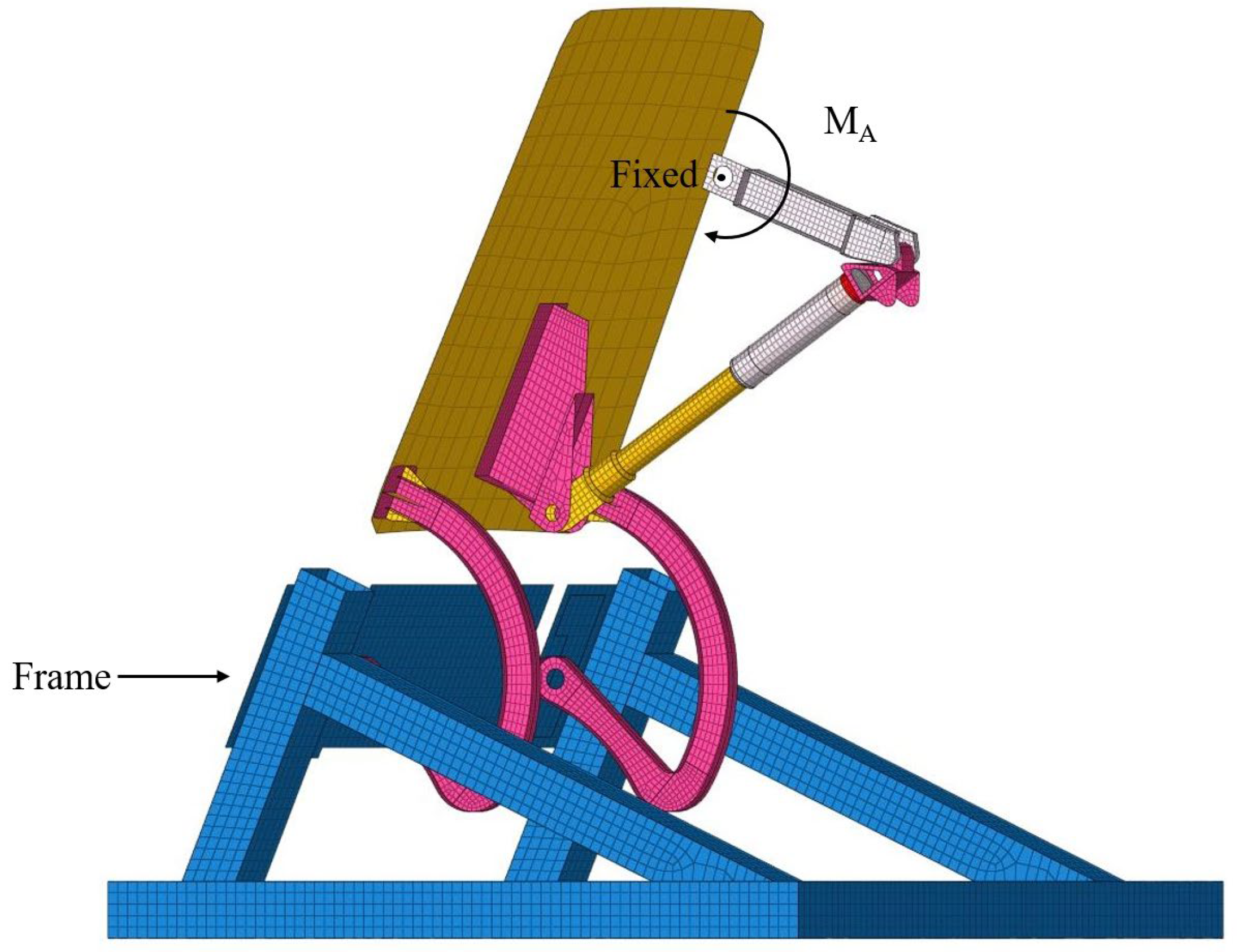
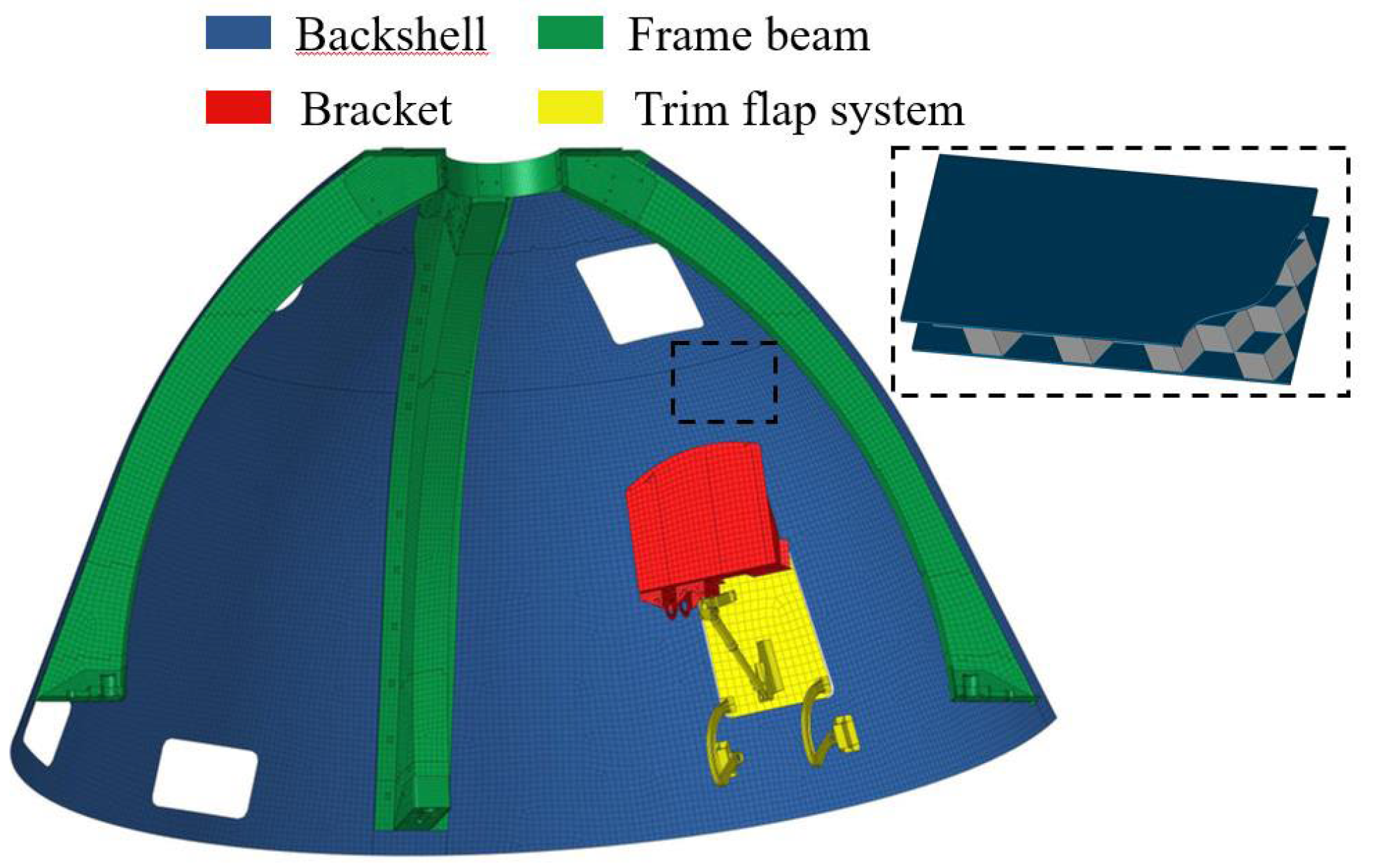
3.2. FE Model
4. Results and Discussion
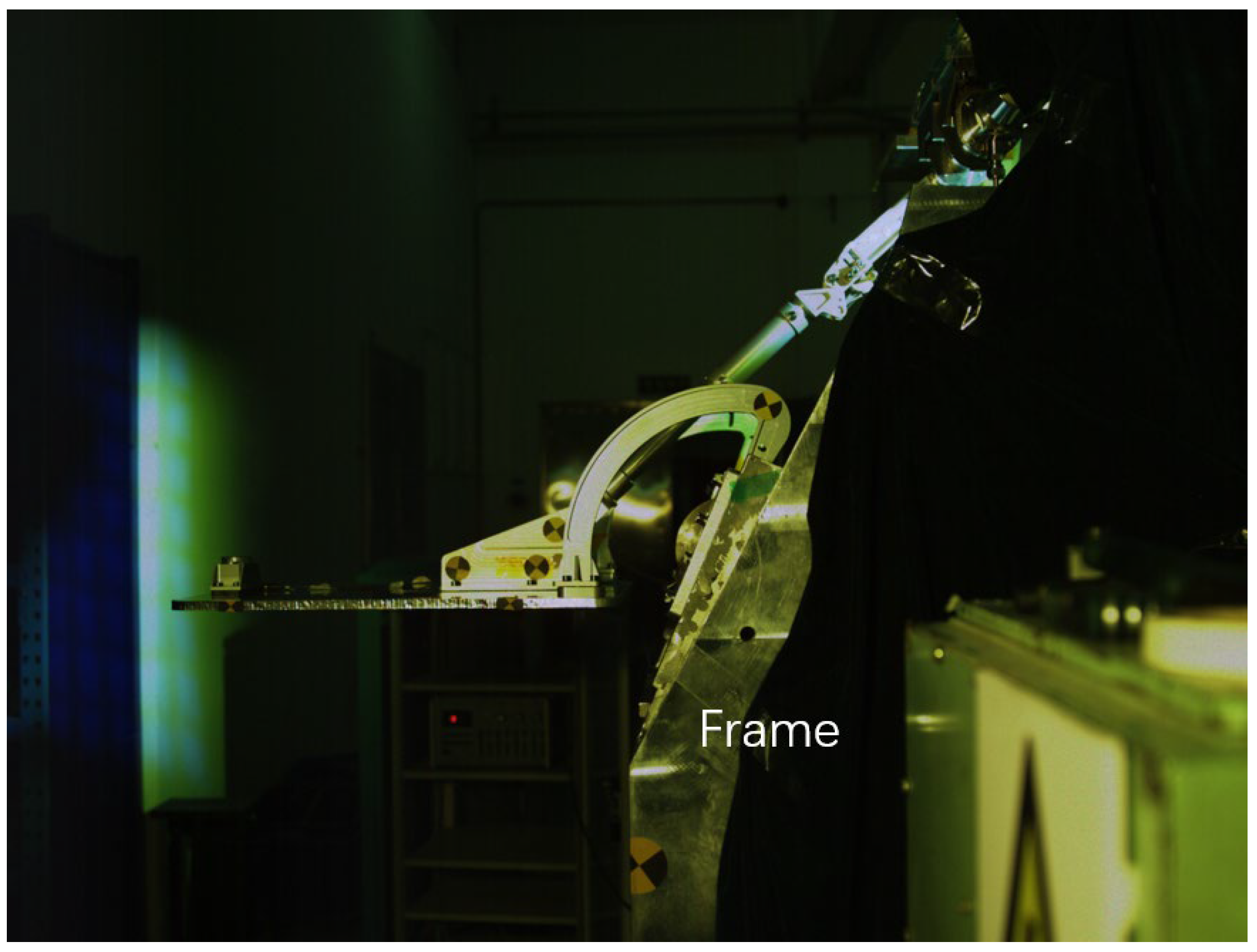
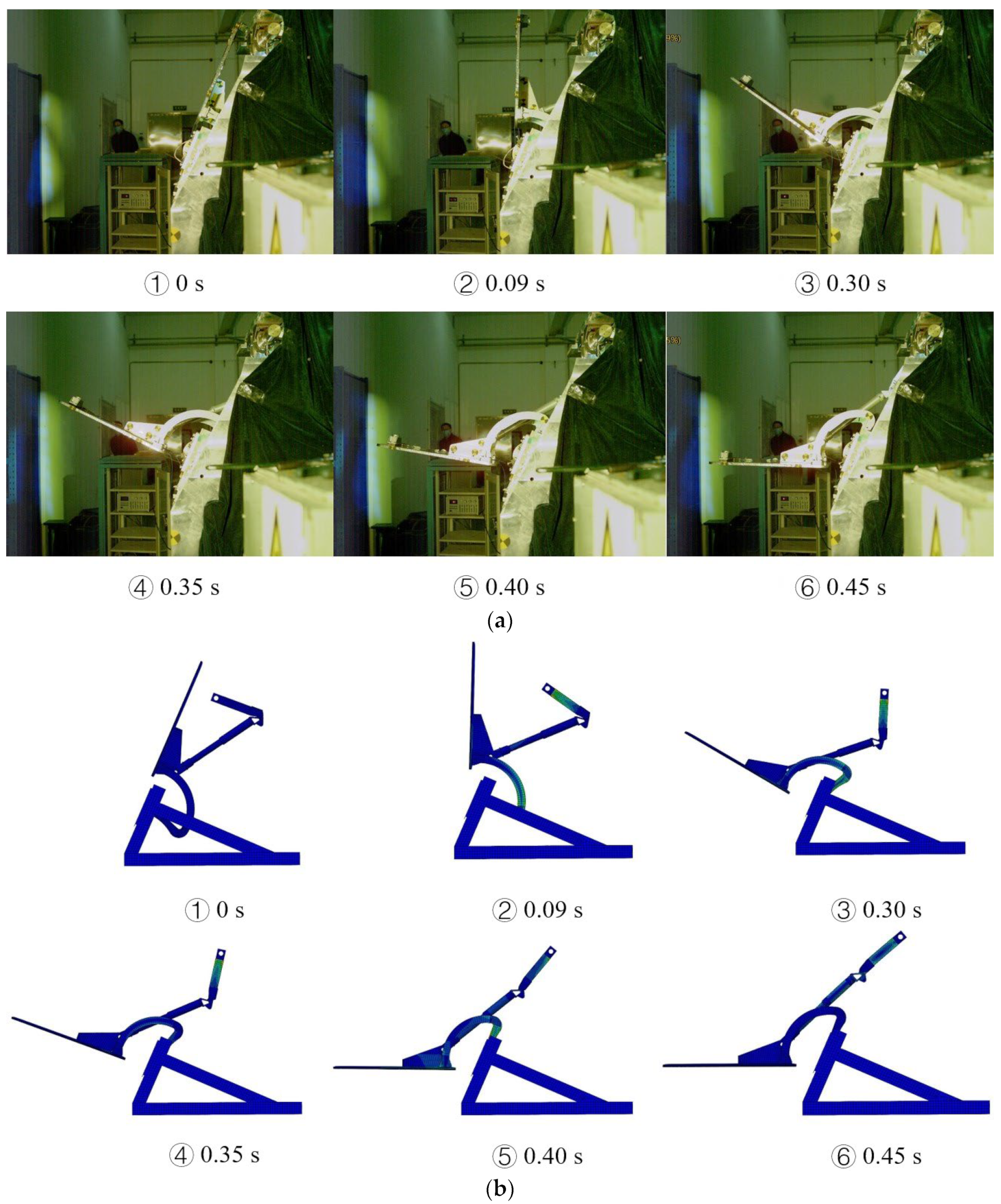
4.1. Deployment Experiment
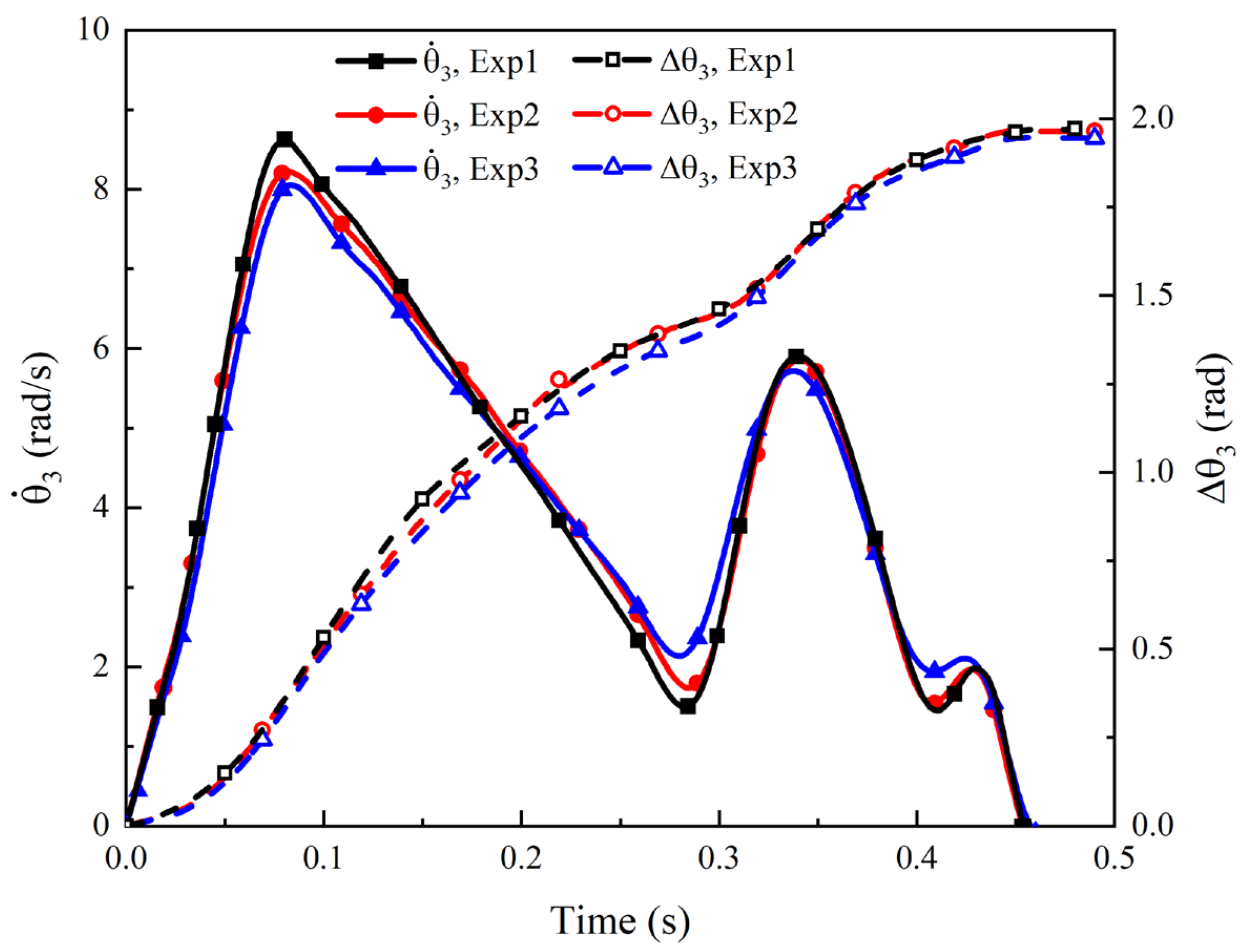
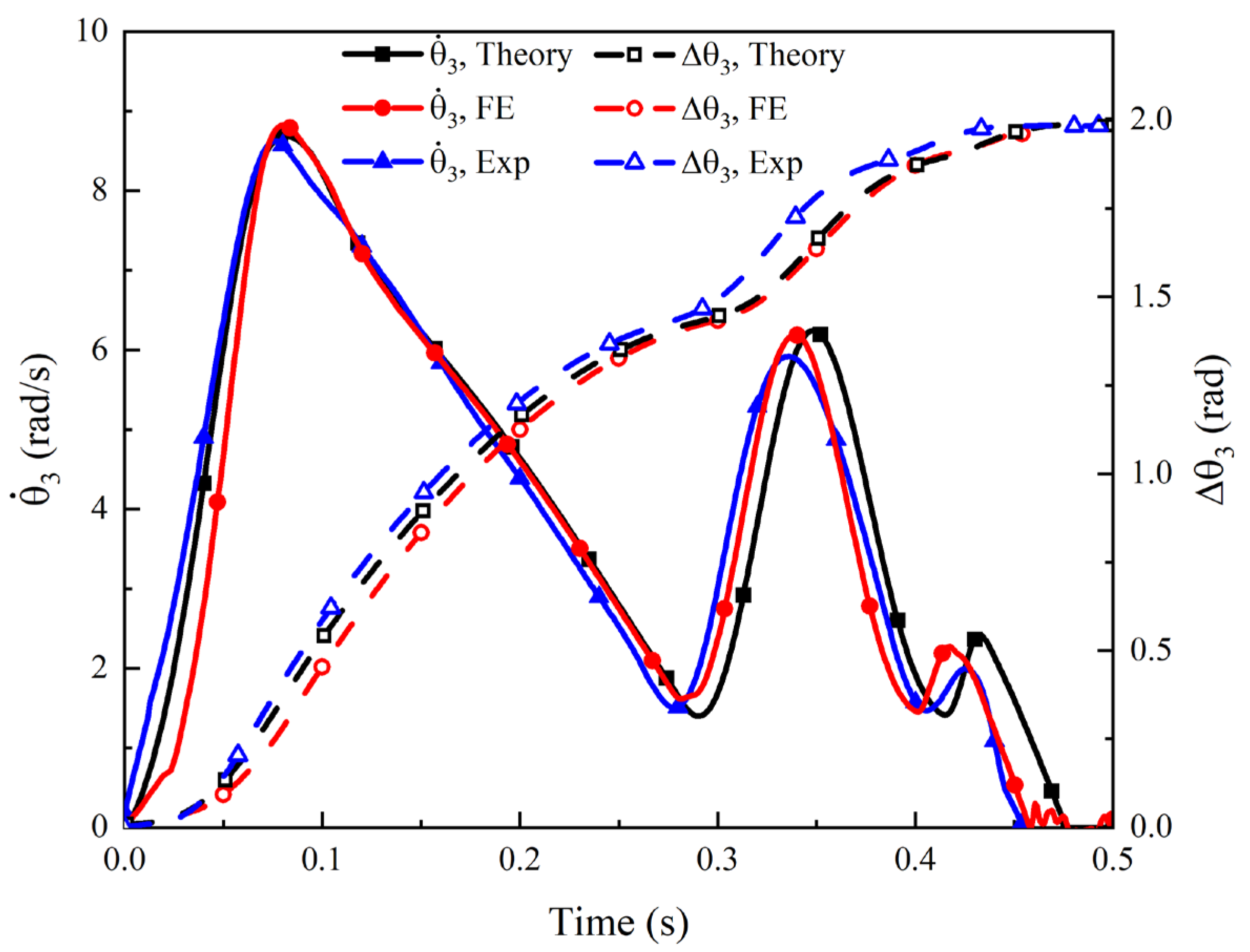
4.2. Comparation between Analysis and Experiments
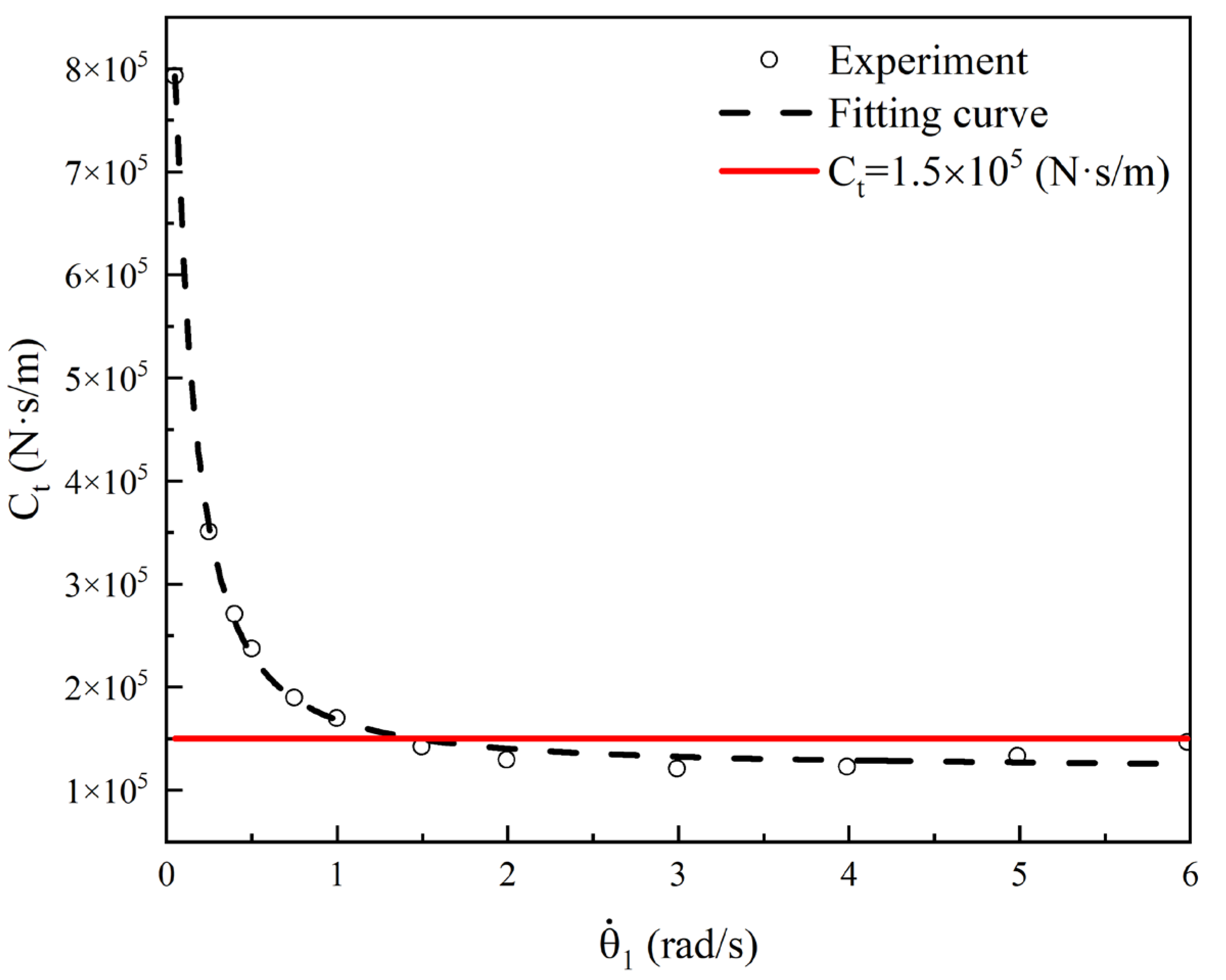
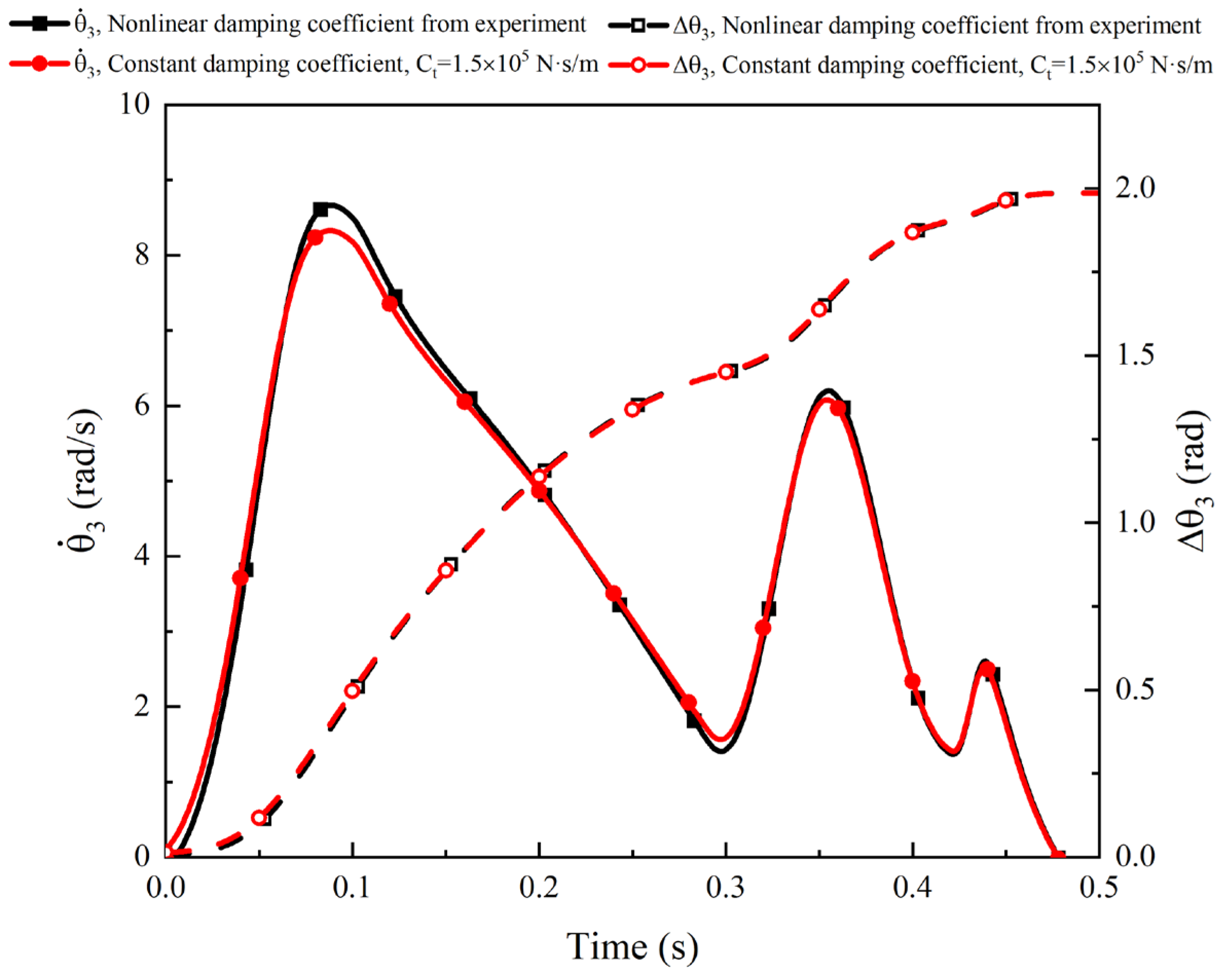
4.3. Influence of the Nonlinear Behavior of Damping
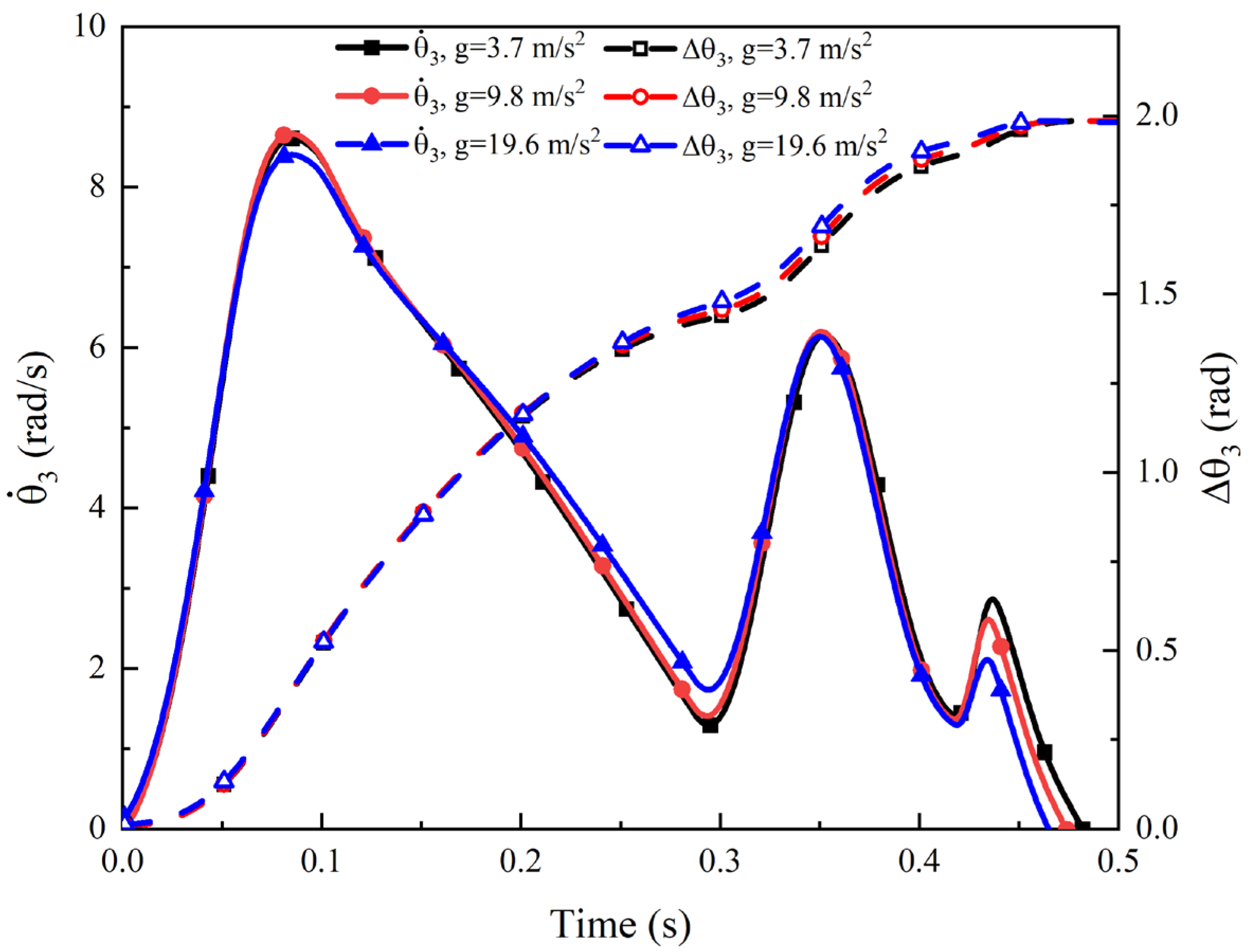
4.4. Influence of Acceleration Environment
4.5. Influence of the Backshell Flexibility
5. Conclusions
- The deployable configuration was adopted for the design of the trim flap system, considering the limitation of the internal space of the Tianwen-1 Mars probe. The proposed trim flap system mainly consisted of the driving mechanism, crank, connecting rod, curved beams, and flap panel, thus forming a single crank–rocker mechanism actuated by the driving mechanism to enable the flap panel deployment within 1.5 s and withstand entry aerodynamic load. The total mass of 10 kg was only about one-quarter of that of the MSL-I designed by NASA and less than one-thirtieth of the ejected ballast mass of MSL, which used the ballast mass CG offset method, allowing the Tianwen-1 Mars probe to carry more payload;
- A theoretical model for the kinematic and dynamic analysis, as well as an FE model were established to evaluate and predict the deployment performance, as well as to provide guidance for a detailed structure design of the trim flap system;
- A full-scale physical prototype of the proposed trim flap system was manufactured based on theoretical and FE analysis. The deployment experiments were conducted and the experimental results validated the effectiveness of the proposed trim flap system. Moreover, by comparing the results achieved from the experiment, theory and FE simulation, analysis results matched well with the experimental result qualitatively and quantitatively, demonstrating the validity of the proposed theoretical and FE models;
- After being validated by the deployment experiment, the developed theoretical and FE models were implemented to investigate the effect of the nonlinear behavior of damping, acceleration environment, and backshell flexibility on the deployment performance of the trim flap system. It was found that the backshell flexibility could result in higher impact loads on the backshell due to the coupling of the backshell structure deformation and the motion of the four-bar mechanism, which was disadvantageous for the deployment performance. Additionally, the other two factors had insignificant effects on the deployment performance and thus could be ignored.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length mm | Centroid Position mm | Mass g | Rotational Inertia g⋅mm2 | |
|---|---|---|---|---|
| AB | 190 | 109 | 294 | 4.86 × 106 |
| BC | 410 | 167 | 504 | 2.44 × 107 |
| CDE | 180 | 209 | 2569 | 2.07 × 108 |
References
- Huang, X.; Li, M.; Wang, X.; Hu, J.; Zhao, Y.; Guo, M.; Xu, C.; Liu, W.; Wang, Y.; Hao, C.; et al. The Tianwen-1 guidance, navigation, and control for Mars entry, descent, and landing. Space Sci. Technol. 2021, 2021, 9846185. [Google Scholar]
- Ye, P.; Sun, Z.; Rao, W.; Meng, L. Mission overview and key technologies of the first Mars probe of China. Sci. China Technol. Sci. 2017, 60, 649–657. [Google Scholar]
- Li, S.; Jiang, X. Review and prospect of guidance and control for Mars atmospheric entry. Prog. Aerosp. Sci. 2014, 69, 40–57. [Google Scholar]
- Reynier, P. Survey of aerodynamics and aerothermodynamics efforts carried out in the frame of Mars exploration projects. Prog. Aerosp. Sci. 2014, 70, 1–27. [Google Scholar] [CrossRef]
- Salotti, J.-M.; Doche, J. Preliminary study of rescue systems for Mars landing. Acta Astronaut. 2021, 188, 81–88. [Google Scholar] [CrossRef]
- Jacob, G.L.; Neeler, G.; Ramanan, R.V. Mars entry mission bank profile optimization. J. Guid. Control. Dyn. 2014, 37, 1305–1316. [Google Scholar] [CrossRef]
- Braun, R.D.; Manning, R.M. Mars exploration entry, descent and landing challenges. J. Spacecr. Rocket. 2007, 44, 310–323. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Li, Q.; Wei, H.; Geng, Y. Performance comparison of typical semi-ballistic Mars entry vehicles. Acta Aerodyn. Sin. 2018, 36, 863–870. [Google Scholar]
- Bur, R.; Benay, R.; Chanetz, B.; Galli, A.; Pot, T.; Hollis, B.; Moss, J. Experimental and numerical study of the Mars Pathfinder vehicle. Aerosp. Sci. Technol. 2003, 7, 510–516. [Google Scholar] [CrossRef]
- Wright, M.J.; Krasa, P.W.; Hwang, H.H.; Beck, R.A.; Campbell, C.H.; Edquist, K.T. Edquist. Overview of entry descent and landing investments in the NASA exploration technology development program. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011. [Google Scholar]
- Korzun, A.M.; Murphy, K.J.; Edquist, K.T. Supersonic aerodynamic characteristics of blunt body trim tab configurations. In Proceedings of the 31st AIAA Applied Aerodynamics Conference, San Diego, CA, USA, 24–27 June 2013. [Google Scholar]
- Kornfeld, R.P.; Prakash, R.; Devereaux, A.S.; Greco, M.E.; Harmon, C.C.; Kipp, D.M. Verification and validation of the Mars Science Laboratory/Curiosity Rover entry, descent, and landing system. J. Spacecr. Rocket. 2014, 51, 1251–1269. [Google Scholar] [CrossRef]
- Hollis, B.R.; Berger, K.T.; Berry, S.A.; Brauckmann, G.J.; Buck, G.M.; DiFulvio, M.; Horvath, T.J.; Liechty, D.S.; Merski, N.R.; Murphy, K.J.; et al. Entry, descent and landing aerothermodynamics: NASA Langley experimental capabilities and contributions. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Murphy, K.J.; Korzun, A.M.; Watkins, N.; Edquist, K.T. Testing of the trim tab parametric model in NASA Langley’s Unitary Plan Wind Tunnel. In Proceedings of the 31st AIAA Applied Aerodynamics Conference, San Diego, CA, USA, 24–27 June 2013. [Google Scholar]
- Lockwood, M.K.; Powell, R.W.; Sutton, K.; Prabhu, R.K.; Graves, C.A.; Epp, C.D.; Carman, G.L. Entry configurations and performance comparisons for the Mars Smart Lander. J. Spacecr. Rocket. 2006, 43, 258–269. [Google Scholar] [CrossRef]
- Kinney, D.J.; Olds, A.D.; Winski, R.G. Entry, Descent and Landing Systems Analysis Study: Phase 2 Report on Mars Science Laboratory Improvement; TM-2011-216988; Jet Propulsion Laboratory, National Aeronautics and Space Administration: Pasadena, CA, USA, 2011.
- Horvath, T.J.; O’Connell, T.F.; Cheatwood, M.N.; Prabhu, R.K.; Alter, S.J. Experimental hypersonic aerodynamic characteristics of Mars Surveyor 2001 precision lander with flap. J. Spacecr. Rocket. 2006, 43, 270–281. [Google Scholar] [CrossRef] [Green Version]
- Winski, R.; Shidner, J.; García-Llama, E.; Grover, M.R.; Prakash, R.; Ivanov, M. Entry, descent, and landing performance trades to increase landed mass for the Mars 2018 mission. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012. [Google Scholar]
- Murphy, K.J.; Horvath, T.J.; Erickson, G.E.; Green, J.M. Supersonic serodynamic characteristics of proposed Mars ’07 Smart Lander configurations. J. Spacecr. Rocket. 2002, 43, 282–292. [Google Scholar] [CrossRef] [Green Version]
- Andersen, B.M.; Whitmore, S.A. Aerodynamic control on a Lunar return capsule using trim-flaps. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 June 2007. [Google Scholar]
- Engel, D.; Skolnik, N.; Putnam, Z.R. Configuration options for hypersonic flaps for Mars entry systems. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15 & 19–21 January 2021. [Google Scholar]
- Dillman, R.A.; Slagle, A.; Korzun, A.M.; Lugo, R.A.; Dwyer-Cianciolo, A.M. Low lift-to-drag morphing shape design. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Yount, B.; Cassell, A.; D’Souza, S. Pterodactyl: Mechanical designs for integrated control design of a mechanically deployable entry vehicle. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Li, Y.; Wei, J.; Dai, L. Structural design and dynamic analysis of new ultra-large planar deployable antennas in space with locking systems. Aerosp. Sci. Technol. 2020, 106, 106082. [Google Scholar]
- Dai, L.; Xiao, R. Optimal design and analysis of deployable antenna truss structure based on dynamic characteristics restraints. Aerosp. Sci. Technol. 2020, 106, 106086. [Google Scholar]
- Zhao, Q.; Guo, J.; Hong, J.; Liu, Z. Analysis of angular errors of the planar multi-closed-loop deployable mechanism with link deviations and revolute joint clearances. Aerosp. Sci. Technol. 2019, 87, 25–36. [Google Scholar]
- Du, X.; Du, J.; Bao, H.; Sun, G. Deployment analysis of deployable antennas considering cable net and truss flexibility. Aerosp. Sci. Technol. 2018, 82–83, 557–565. [Google Scholar]
- Sepulveda, J. Aerodynamic Modeling and Assessment of Flaps for Hypersonic Trajectory Control of Blunt Bodies. Master’s Thesis, University of Illinois, Champaign, IL, USA, 2017. [Google Scholar]
- Chai, Q.; Zeng, J.; Ma, H.; Li, K.; Han, Q. A dynamic modeling approach for nonlinear vibration analysis of the L-type pipeline system with clamps. Chin. J. Aeronaut. 2020, 33, 3253–3265. [Google Scholar]
- Yuan, L.; Yan, H.; Yao, X.; Lu, J.; Liu, J. Transmission efficiency of the motion mechanism in high-lift devices. J. Aircraft. 2020, 57, 761–772. [Google Scholar] [CrossRef]
- Narita, K.; Priest, M. Metal-metal friction characteristics and the transmission efficiency of a metal V-belt-type continuously variable transmission. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2007, 221, 11–26. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S.; Furfaro, R.; Wang, Z.; Ji, Y. High-dimensional uncertainty quantification for Mars atmospheric entry using adaptive generalized polynomial chaos. Aerosp. Sci. Technol. 2020, 107, 106240. [Google Scholar]


| ρ kg/m3 | MPa | MPa | MPa | MPa | MPa | μ | |
|---|---|---|---|---|---|---|---|
| Modified cyanate ester/M40 | 550 | 230,000 | 7000 | 4000 | 0.3 | ||
| Epoxy resin/M55 | 1640 | 240,000 | 7000 | 4600 | 3833.33 | 3833.33 | 0.3 |
| Aluminum honeycomb | 27 | 0.0001 | 0.0001 | 0.0001 | 140 | 76 | 0.3 |
| Aluminum alloy | 2700 | 72,000 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Li, Y.; Hu, D.; Rao, W.; Qi, Y.; Yang, Q.; Wang, G. Trim Flap System Design for Improving Ballistic-Lifting Entry Performance of the Tianwen-1 Mars Probe. Aerospace 2022, 9, 287. https://doi.org/10.3390/aerospace9060287
Li X, Li Y, Hu D, Rao W, Qi Y, Yang Q, Wang G. Trim Flap System Design for Improving Ballistic-Lifting Entry Performance of the Tianwen-1 Mars Probe. Aerospace. 2022; 9(6):287. https://doi.org/10.3390/aerospace9060287
Chicago/Turabian StyleLi, Xinli, Yansong Li, Dayong Hu, Wei Rao, Yufeng Qi, Qiang Yang, and Gang Wang. 2022. "Trim Flap System Design for Improving Ballistic-Lifting Entry Performance of the Tianwen-1 Mars Probe" Aerospace 9, no. 6: 287. https://doi.org/10.3390/aerospace9060287
APA StyleLi, X., Li, Y., Hu, D., Rao, W., Qi, Y., Yang, Q., & Wang, G. (2022). Trim Flap System Design for Improving Ballistic-Lifting Entry Performance of the Tianwen-1 Mars Probe. Aerospace, 9(6), 287. https://doi.org/10.3390/aerospace9060287