
On the Estimation of Vector Wind Profiles Using Aircraft-Derived Data and Gaussian Process Regression




Abstract
:1. Introduction
2. Methods
2.1. Deriving Wind Velocity from ADS-B and Mode S Data
2.1.1. ADS-B and Mode S
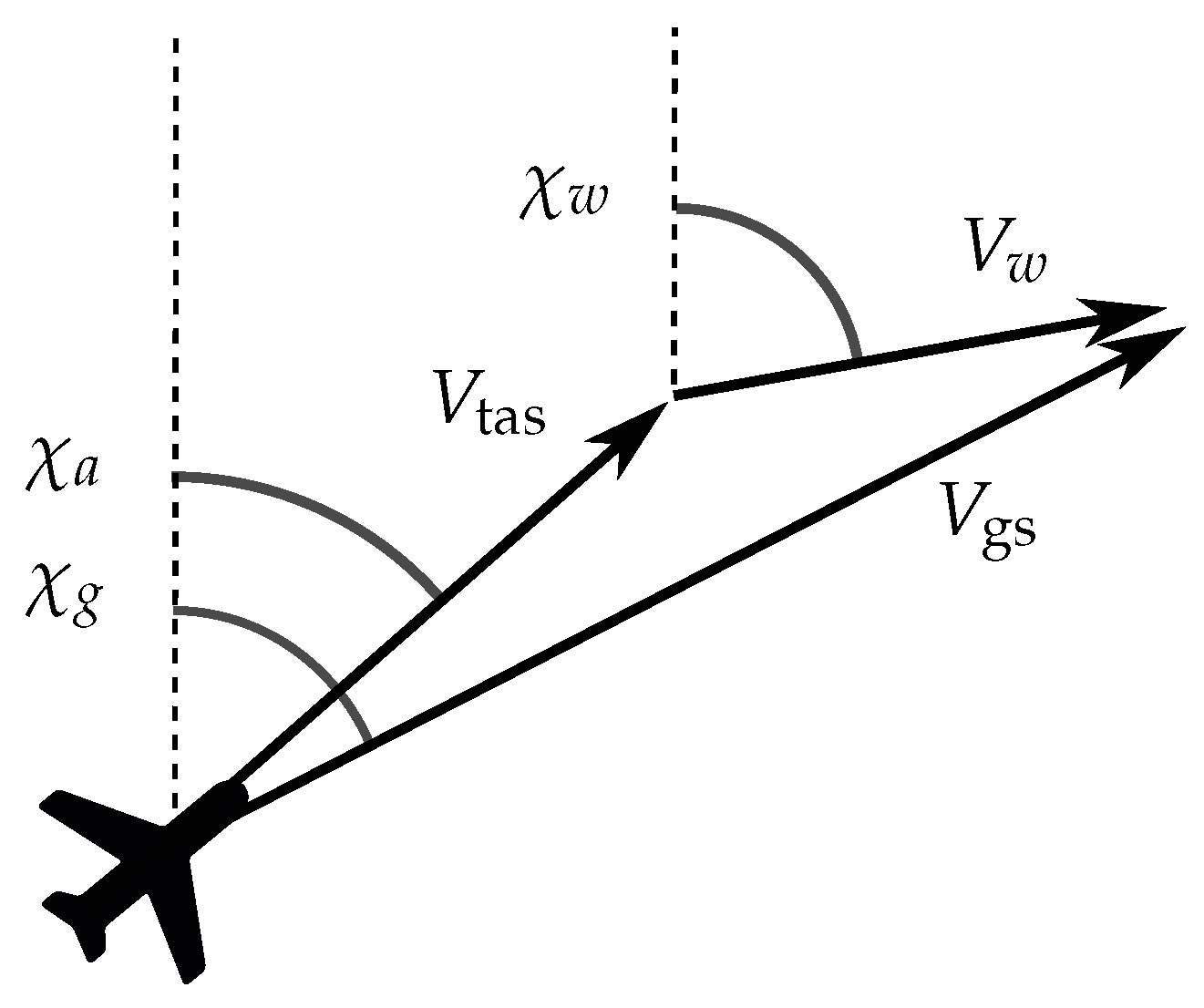
2.1.2. Wind Velocity Derivation
2.2. Vector Wind Profile
2.3. The Kalman Filter-Based Models
- If , the algorithm is initialized. An initial state vector is given as , where the superscript f indicates forecast. An error covariance matrix of this estimation, , is also given as an input.
- If :
- (a)
- Analysis
- The Kalman gain matrix is computed with the formula:. This matrix is based in the uncertainties on the current state and the new measurements.
- The state vector is updated using the new observations and :, where the superscript a stands for analysis.
- The covariance matrix of the analysis estimation is computed as:.
- (b)
- Forecast
- The forecast of states for the next time step is calculated as:.
- The error covariance matrix of this estimation is calculated as:.
2.3.1. Adapted Kalman Filter
2.3.2. The Smooth Adapted Kalman Filter
2.4. Gaussian Process Regression
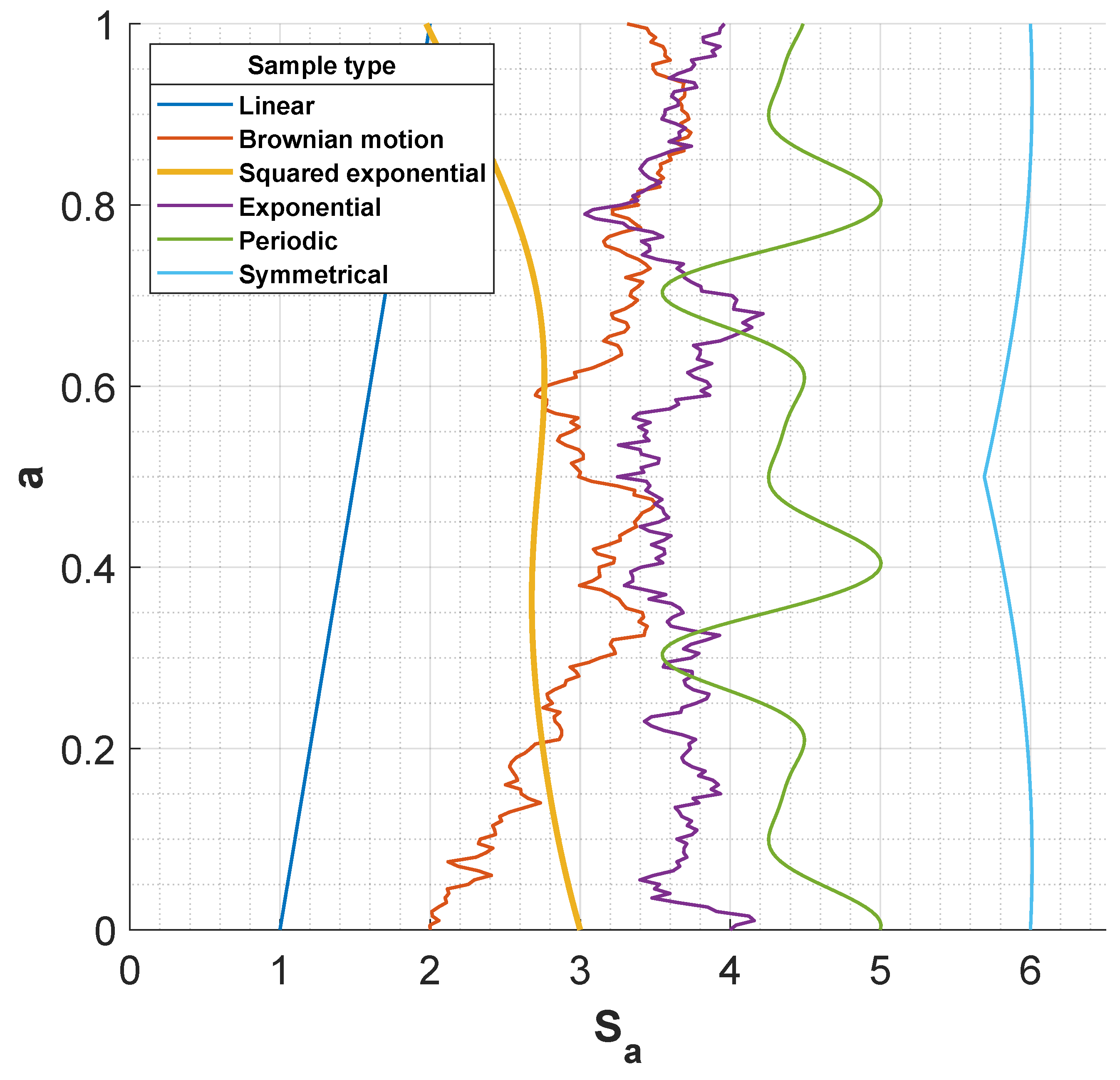
- is a Gaussian process. Any sample, , is jointly Gaussian-distributed with zero-mean and some covariance function .
- h is a basis function that projects the input into a p-dimensional space and allows the trend to be, in general, non-linear.
Adaptation of GPR to Wind Velocity Output
3. Results
3.1. Model Set Up
3.1.1. Kalman Filters
3.1.2. GPR
3.1.3. Baseline Vector Wind Profile
3.2. Performance Evaluation
- 1.
- The AKF, SAKF, and baseline estimators initiate at 13:45 UTC, 15 min before validation. This time interval acts as a burn-in period.
- 2.
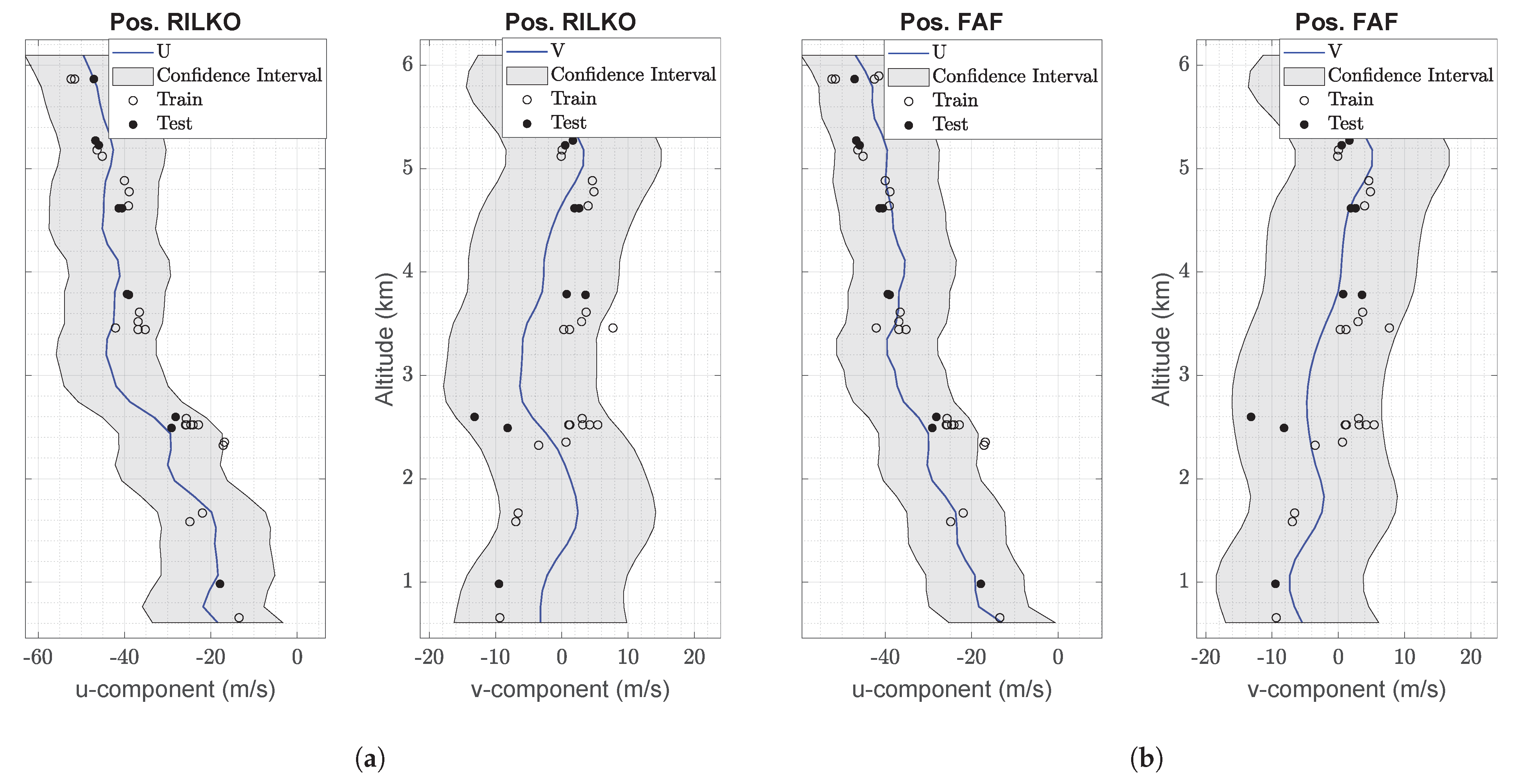
- The GPR model is initially trained using a previous 1 h dataset selected from 12:55 to 13:55 UTC. All landing data passing through the considered waypoints are excluded from the train dataset, and are only used for validation.
- 3.
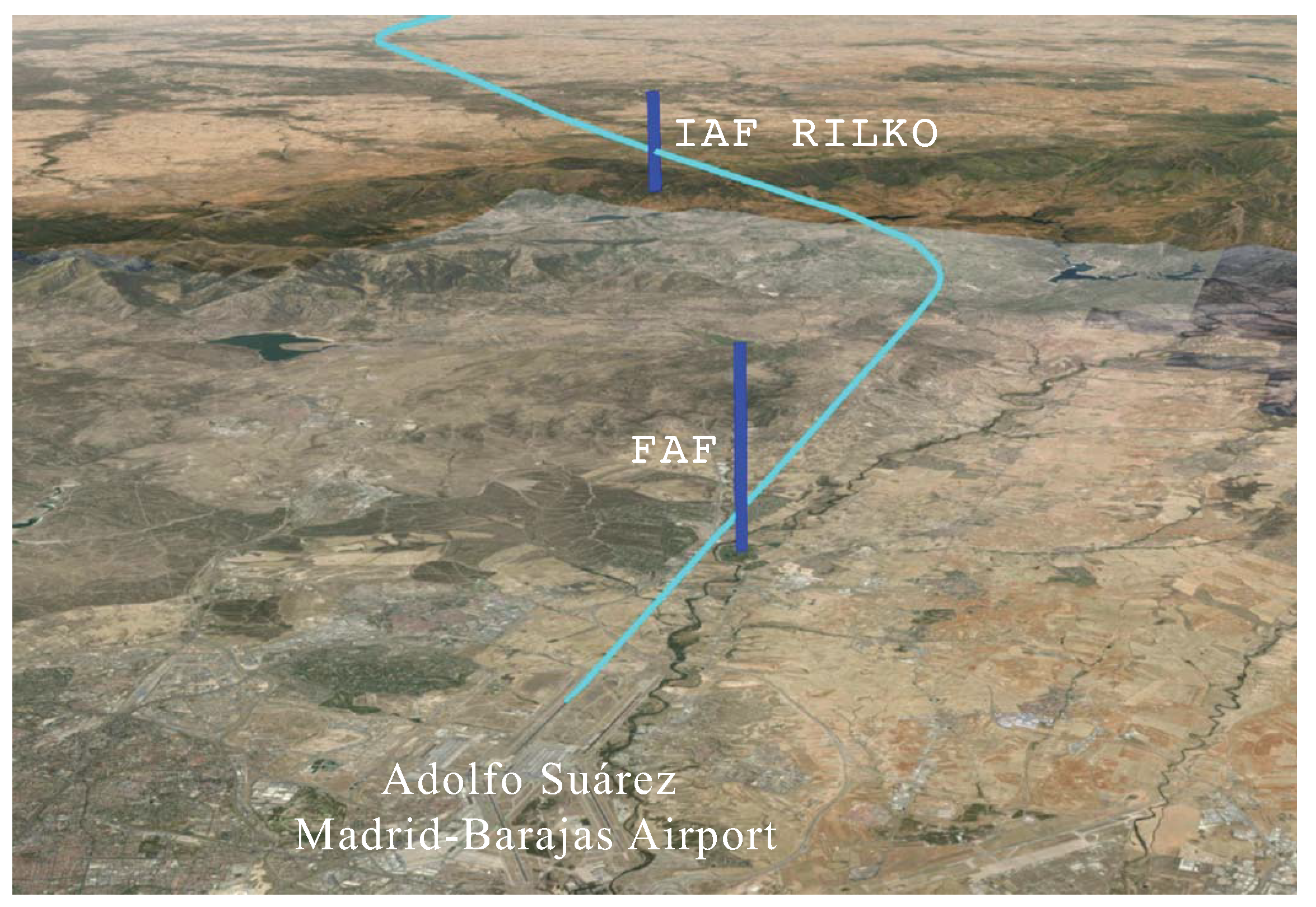
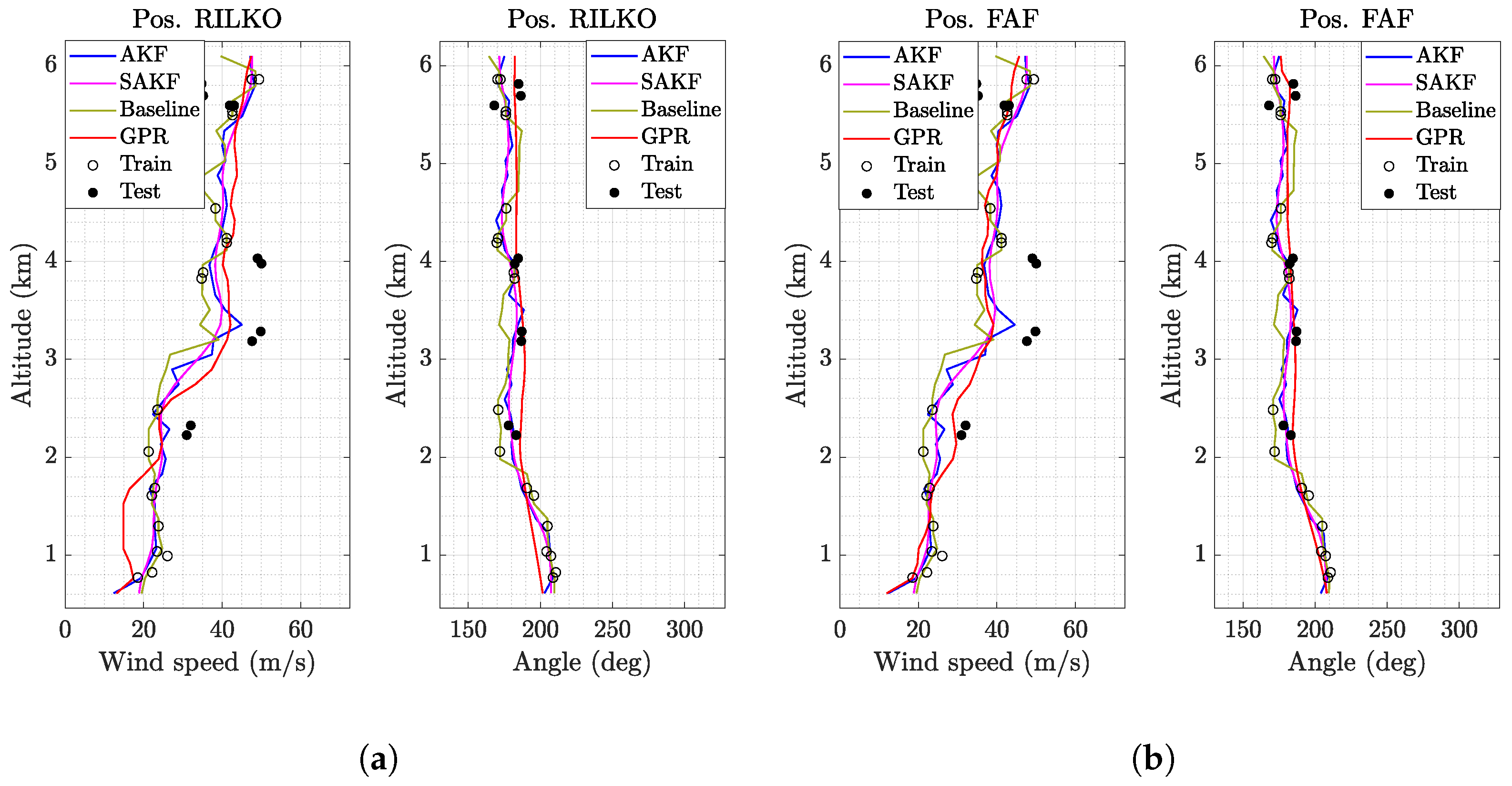
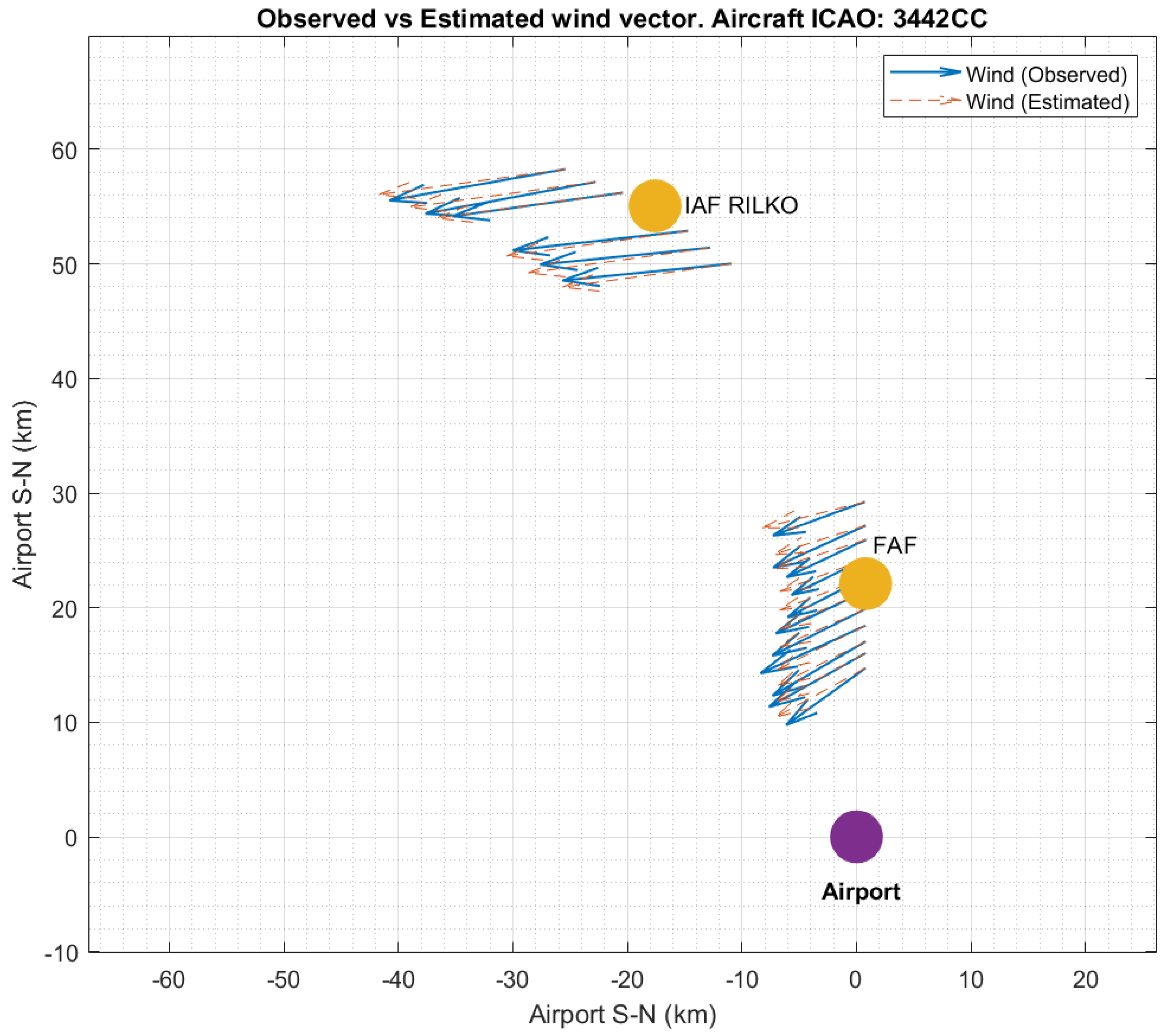
- The validation phase starts at 14:00 UTC. The vector wind profiles are compared with the testing data coming from the landing aircraft when passing through the waypoints, namely RILKO IAF and FAF. Every 15 min, a new GPR model is trained to detect potential trend changes in the wind behaviour. Validation finishes at 15:00.
- 4.
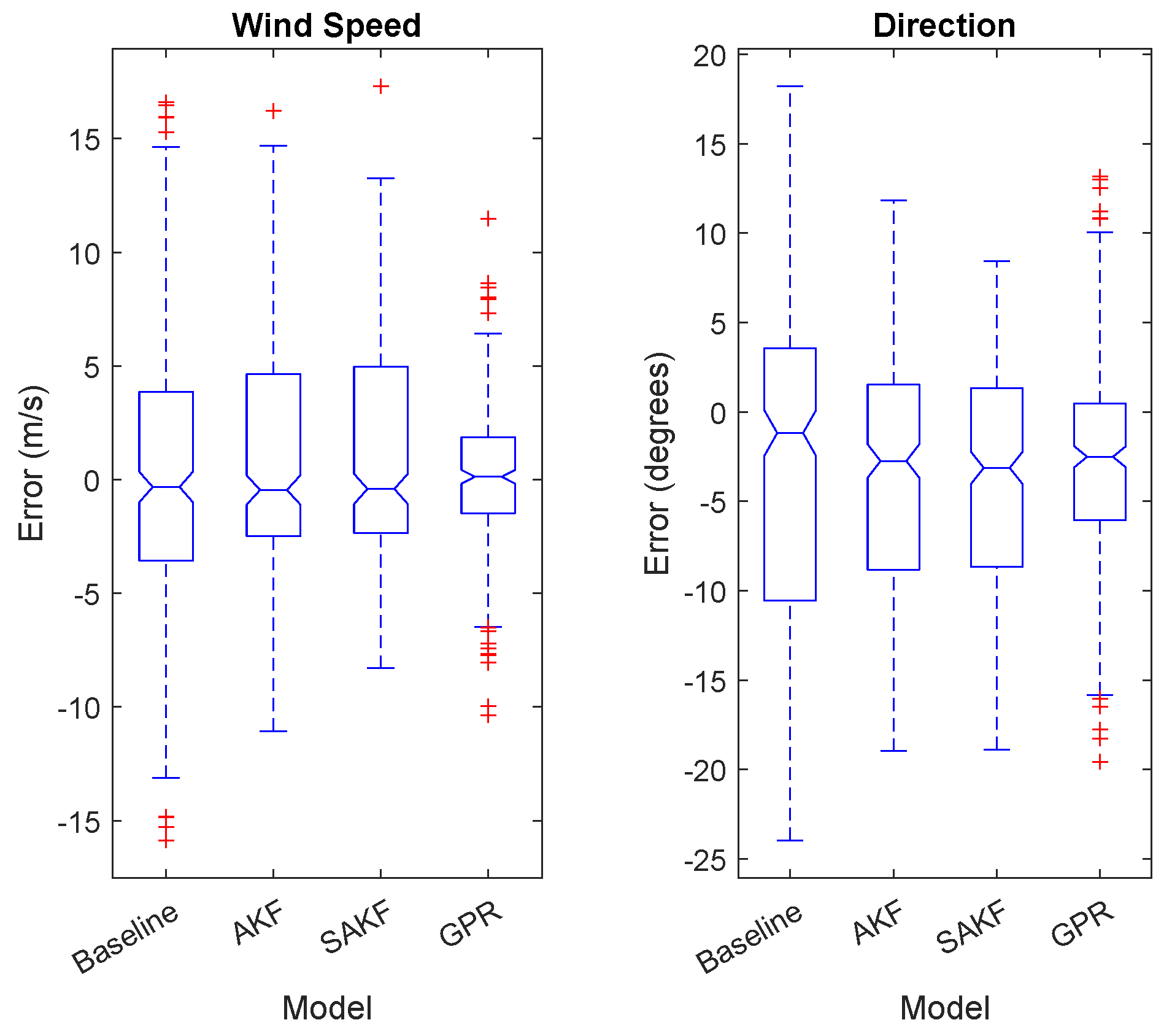
- Different performance measures are considered in order to assess the VWP estimations. The root mean square error (RMSE) and the mean absolute error (MAE) of the wind components and the wind speed are computed. In addition, boxplots of wind speed and direction errors are also obtained.
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cook, A.; Rivas, D. Complexity Science in Air Traffic Management; Routledge: London, UK, 2016. [Google Scholar]
- Rodriguez-Sanz, A.; Cano, J.; Rubio Fernandez, B. Impact of weather conditions on airport arrival delay and throughput. Aircr. Eng. Aerosp. Technol. 2021, 94, 60–78. [Google Scholar] [CrossRef]
- Rapid Refresh (NOAA). Available online: https://rapidrefresh.noaa.gov (accessed on 16 May 2022).
- FAQ: Weather Delay (FAA). Available online: https://www.faa.gov/nextgen/programs/weather/faq (accessed on 16 May 2022).
- NextGen (FAA). Available online: https://www.faa.gov/nextgen (accessed on 16 May 2022).
- Dalmau, R.; Prats, X.; Baxley, B. Using broadcast wind observations to update the optimal descent trajectory in real-time. J. Air Transp. 2020, 28, 82–92. [Google Scholar] [CrossRef]
- Buelta, A.; Olivares, A.; Staffetti, E. Iterative learning control for precise aircraft trajectory tracking in continuous climb and descent operations. IEEE Trans. Intell. Transp. Syst. 2021, 1–11, early access article.. [Google Scholar] [CrossRef]
- De Jong, P.M.A.; van der Laan, J.J.; in ’t Veld, A.C.; van Paassen, M.M.; Mulder, M. Wind-profile estimation using airborne sensors. J. Aircr. 2014, 51, 1852–1863. [Google Scholar] [CrossRef]
- Pellerin, P. SESAR JU—Initial 4D “On Time”; ATC Global: London, UK, 2012. [Google Scholar]
- Reynolds, T.G.; McPartland, M.; Teller, T.; Troxel, S. Exploring wind information requirements for four dimensional trajectory-based operations. In Proceedings of the Eleventh USA/Europe Air Traffic Management Research and Development Seminar, Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- De Haan, S. High-resolution wind and temperature observations from aircraft tracked by Mode-S air traffic control radar. J. Geophys. Res. Atmos. 2011, 116, D10. [Google Scholar] [CrossRef]
- Robert, E.; De Smedt, D. Comparison of operational wind forecasts with recorded flight data. In Proceedings of the 10th USA/Europe Air Traffic Management Research and Development Seminar, Chicago, IL, USA, 10–13 June 2013. [Google Scholar]
- Sun, J.; Vû, H.; Ellerbroek, J.; Hoekstra, J.M. Weather field reconstruction using aircraft surveillance data and a novel meteo-particle model. PLoS ONE 2018, 13, e0205029. [Google Scholar] [CrossRef]
- Liu, T.; Xiong, T.; Thomas, L.; Liang, Y. ADS-B based wind speed vector inversion algorithm. IEEE Access 2020, 8, 150186–150198. [Google Scholar] [CrossRef]
- SWIM Project. Available online: https://www.eurocontrol.int/concept/system-wide-information-management (accessed on 16 May 2022).
- De Haan, S.; Stoffelen, A. Assimilation of high-resolution Mode-S wind and temperature observations in a regional NWP model for nowcasting applications. Weather Forecast. 2012, 27, 918–937. [Google Scholar] [CrossRef]
- Cardinali, C.; Isaksen, L.; Andersson, E. Use and impact of automated aircraft data in a global 4DVAR data assimilation system. Mon. Weather Rev. 2003, 131, 1865–1877. [Google Scholar] [CrossRef]
- 2019 by the Numbers (Flightradar24). Available online: https://www.flightradar24.com/blog/flightradar24s-2019-by-the-numbers/ (accessed on 16 May 2022).
- AMDAR Observing System. Available online: https://public.wmo.int/en/programmes/global-observing-system/amdar-observing-system (accessed on 16 May 2022).
- Strajnar, B. Validation of Mode-S meteorological routine air report aircraft observations. J. Geophys. Res. Atmos. 2012, 117, D23. [Google Scholar] [CrossRef]
- Marinescu, M.; Olivares, A.; Staffetti, E.; Sun, J. Wind profile estimation from aircraft derived data using Kalman filters and Gaussian process regression. In Proceedings of the 14th USA/Europe Air Traffic Management Research and Development Seminar, Virtual Event, 20–23 September 2021. [Google Scholar]
- Mondoloni, S. A multiple-scale model of wind-prediction uncertainty and application to trajectory prediction. In Proceedings of the 6th AIAA Aviation Technology, Integration, and Operations Conference, Wichita, KS, USA, 25–27 September 2006. [Google Scholar]
- Dalmau, R.; Pérez-Batlle, M.; Prats, X. Estimation and prediction of weather variables from surveillance data using spatio-temporal Kriging. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference, St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar]
- Delahaye, D.; Puechmorel, S.; Vacher, P. Windfield estimation by radar track Kalman filtering and vector spline extrapolation. In Proceedings of the 22nd Digital Avionics Systems Conference, Indianapolis, IN, USA, 12–16 October 2003. [Google Scholar]
- De Leege, A.M.P.; van Paassen, M.M.; Mulder, M. Using automatic dependent surveillance-broadcast for meteorological monitoring. J. Aircr. 2013, 50, 249–261. [Google Scholar] [CrossRef]
- Sun, J.; Vû, H.; Ellerbroek, J.; Hoekstra, J.M. pyModeS: Decoding Mode-S surveillance data for open air transportation research. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2777–2786. [Google Scholar] [CrossRef]
- Weston, K.J. Boundary layer climates. Q. J. R. Meteorol. Soc. 1988, 114, 1568. [Google Scholar] [CrossRef]
- Zoumakis, N.; Kelessis, A.G. Methodology for bulk approximation of the wind profile power-law exponent under stable stratification. Bound.-Layer Meteorol. 1991, 55, 199–203. [Google Scholar] [CrossRef]
- User’s Guide for Monthly Vector Wind Profile Mode. Available online: https://ntrs.nasa.gov/api/citations/20000011734/downloads/20000011734.pdf (accessed on 16 May 2022).
- Smith, O.; Adelfang, S. Wind profile models-Past, present and future for aerospace vehicle ascent design. In Proceedings of the 36th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 12–15 January 1998. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Bucy, R.S.; Joseph, P.D. Filtering for stochastic processes with applications to guidance. N. Y. Intersci. Publ. 1968, 17, 184–185. [Google Scholar]
- Chen, Z. Bayesian filtering: From Kalman filters to particle filters, and beyond. Statistics 2003, 182, 1–69. [Google Scholar]
- Talagrand, O. Assimilation of observations, an introduction. J. Meteorol. Soc. Jpn. Ser. II 1997, 75, 191–209. [Google Scholar] [CrossRef] [Green Version]
- Bishop, C.H.; Etherton, B.J.; Majumdar, S.J. Adaptive sampling with the ensemble transform Kalman filter. Part I: Theoretical aspects. Mon. Weather Rev. 2001, 129, 420–436. [Google Scholar] [CrossRef]
- Hunt, B.; Kostelich, E.; Szunyogh, I. Efficient data assimilation for spatiotemporal chaos: A local ensemble transform Kalman filter. Phys. D Nonlinear Phenom. 2005, 230, 112–126. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, C.; Williams, C. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Martino, L.; Read, J. A joint introduction to Gaussian processes and relevance vector machines with connections to Kalman filtering and other kernel smoothers. Inf. Fusion 2021, 74, 17–38. [Google Scholar] [CrossRef]
- Wang, B.; Chen, T. Gaussian process regression with multiple response variables. Chemom. Intell. Lab. Syst. 2015, 142, 159–165. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Cai, J.; Ong, Y.S. Remarks on multi-output Gaussian process regression. Knowl.-Based Syst. 2018, 144, 102–121. [Google Scholar] [CrossRef]
- Micchelli, C.A.; Xu, Y.; Zhang, H. Universal kernels. J. Mach. Learn. Res. 2006, 7, 2651–2667. [Google Scholar]
- Schölkopf, B.; Burges, C.J.; Smola, A.J. Advances in Kernel Methods; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Bo, L.; Sminchisescu, C. Greedy block coordinate descent for large scale Gaussian process regression. In Proceedings of the Twenty-Fourth Conference on Uncertainty in Artificial Intelligence, Helsinki, Finland, 9–12 July 2008. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Variable | Baseline | AKF | SAKF | GPR |
|---|---|---|---|---|---|
| RMSE (m/s) | u | 6.2 | 4.8 | 5.0 | 3.1 |
| v | 6.0 | 5.1 | 5.1 | 2.9 | |
| Wind speed | 6.5 | 5.0 | 5.2 | 3.0 | |
| MAE (m/s) | u | 4.8 | 3.7 | 3.9 | 2.4 |
| v | 4.4 | 3.6 | 3.5 | 2.4 | |
| Wind speed | 5.0 | 3.8 | 3.9 | 2.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marinescu, M.; Olivares, A.; Staffetti, E.; Sun, J. On the Estimation of Vector Wind Profiles Using Aircraft-Derived Data and Gaussian Process Regression. Aerospace 2022, 9, 377. https://doi.org/10.3390/aerospace9070377
Marinescu M, Olivares A, Staffetti E, Sun J. On the Estimation of Vector Wind Profiles Using Aircraft-Derived Data and Gaussian Process Regression. Aerospace. 2022; 9(7):377. https://doi.org/10.3390/aerospace9070377
Chicago/Turabian StyleMarinescu, Marius, Alberto Olivares, Ernesto Staffetti, and Junzi Sun. 2022. "On the Estimation of Vector Wind Profiles Using Aircraft-Derived Data and Gaussian Process Regression" Aerospace 9, no. 7: 377. https://doi.org/10.3390/aerospace9070377
APA StyleMarinescu, M., Olivares, A., Staffetti, E., & Sun, J. (2022). On the Estimation of Vector Wind Profiles Using Aircraft-Derived Data and Gaussian Process Regression. Aerospace, 9(7), 377. https://doi.org/10.3390/aerospace9070377