
Aircraft Lateral-Directional Aerodynamic Parameter Identification and Solution Method Using Segmented Adaptation of Identification Model and Flight Test Data

Abstract
:1. Introduction
2. Identification Principle of Aerodynamic Parameters Based on Combined Maneuvers Scheme
2.1. Principle of Aerodynamic Parameter Identification
2.2. Angular Acceleration Estimation Method
2.3. Synchronization of Control Surface Deflection Data and Angular Velocity Data
- (1)
- Having been given the initial value in the generic aerodynamic model, the unknown parameters are iterated to minimize the cost function (10).
- (2)
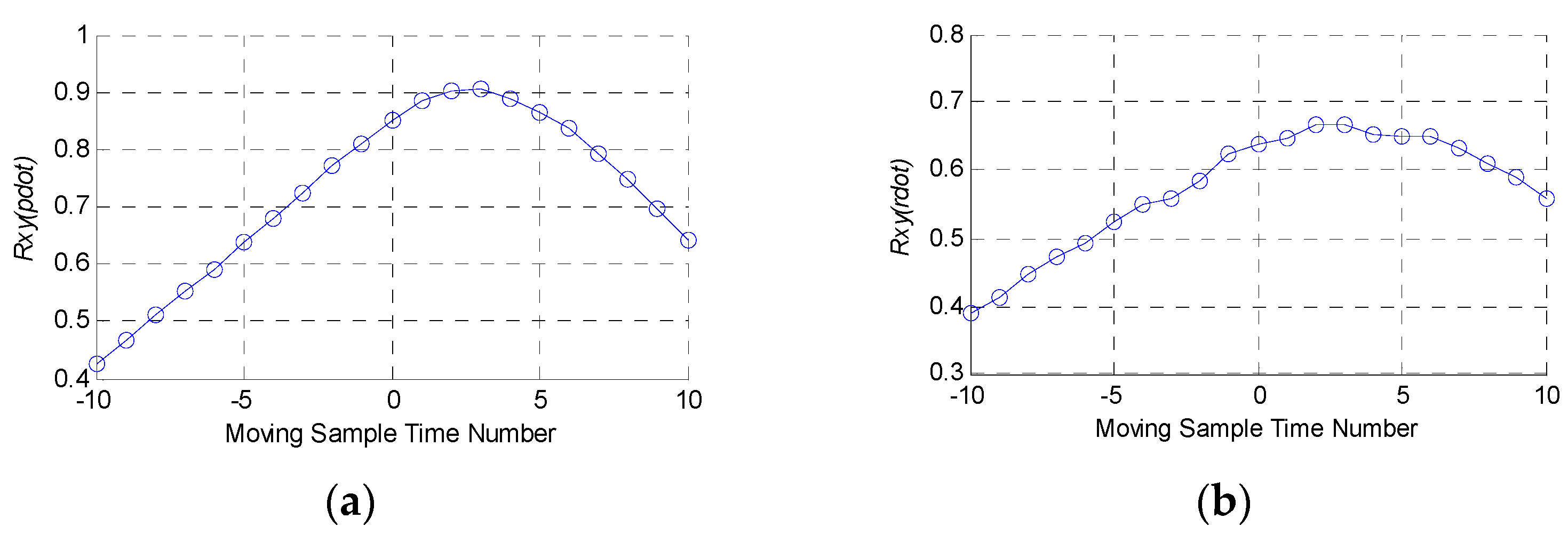
- Time delay of the control surface deflection data could be gained with the calculation of the cross-correlation function between AAR of the AVEM and differential angular velocity data. Then, the time-delay calibration of control surface deflection data is carried out;
- (3)
- The unknown parameters in the generic aerodynamic model are iterated once again with the calibrated control surface deflection data to make the AVEM fit the flight data. The aerodynamic moment coefficient observations calculated using the angular acceleration of the AVEM at this moment could be applied for the identification of aerodynamic derivatives. The flow diagram of the angular acceleration estimation method is shown as Figure 2:
3. Segmented Adaptation Method of Data Segments and Identification Models
3.1. Data Segmentation Method Based on Requirements of Identifiability
- (1)
- The variance of the observation error is estimated and used as the benchmark for the observation error, the estimation formula is the following:
- (2)
- The data segments whose observation magnitude is 5 times greater than the observation error are selected for identification, on the basis that the magnitude of most data is obviously greater than the sensor measurement error and there is no obvious collinearity;
- (3)
- On the basis of data segmentation in the previous steps, the aerodynamic derivatives obtained from wind tunnel tests are used to calculate the magnitude of each component of aerodynamic force and moment coefficients in the motion of aircraft. Further, the data will be segmented according to the components and the magnitude of aerodynamic force or moment coefficient generated by each motion variable and control variable. The components of aerodynamic force and moment within the same data segment should be similar so that identification can be carried out using the same identification model. Aerodynamic force or moment coefficients generated by motion variables and control variables should be significantly greater than the observation errors to reduce its impact on identification results.
3.2. Identification Model Adaptation Method Based on Segmented Flight Test Data
- (1)
- The fitting evaluation metric of the identification model to the observation variable.
- (2)
- The fitting evaluation metric of the identification model structure of side force.
- (3)
- The fitting evaluation metric of the identification model structure of lateral-directional moment.
- (1)
- Flight data is segmented based on requirements of identifiability. Firstly, the observation error is estimated, and the data segments whose observation value is 5 times greater than observation error are selected for identification. Further, the data are segmented according to the components and the magnitude of aerodynamic force and moment coefficients generated by each motion variable and control variable;
- (2)
- The model structure of each data segment is determined preliminarily through the stepwise regression method. Then, the scope of the data segment and model structure will be fine-tuned to make them adapt each other. The flow diagram of the data segmentation and model adaptation method is shown as Figure 3:
4. Aerodynamic Parameter Identification and Solution Method
4.1. Identification Procedure of Aerodynamic Derivatives
4.2. Least Squares Mixed Estimation for Step-by-Step Identification
5. An Example of Lateral-Directional Aerodynamic Derivative Identification
5.1. Estimation of Angular Acceleration
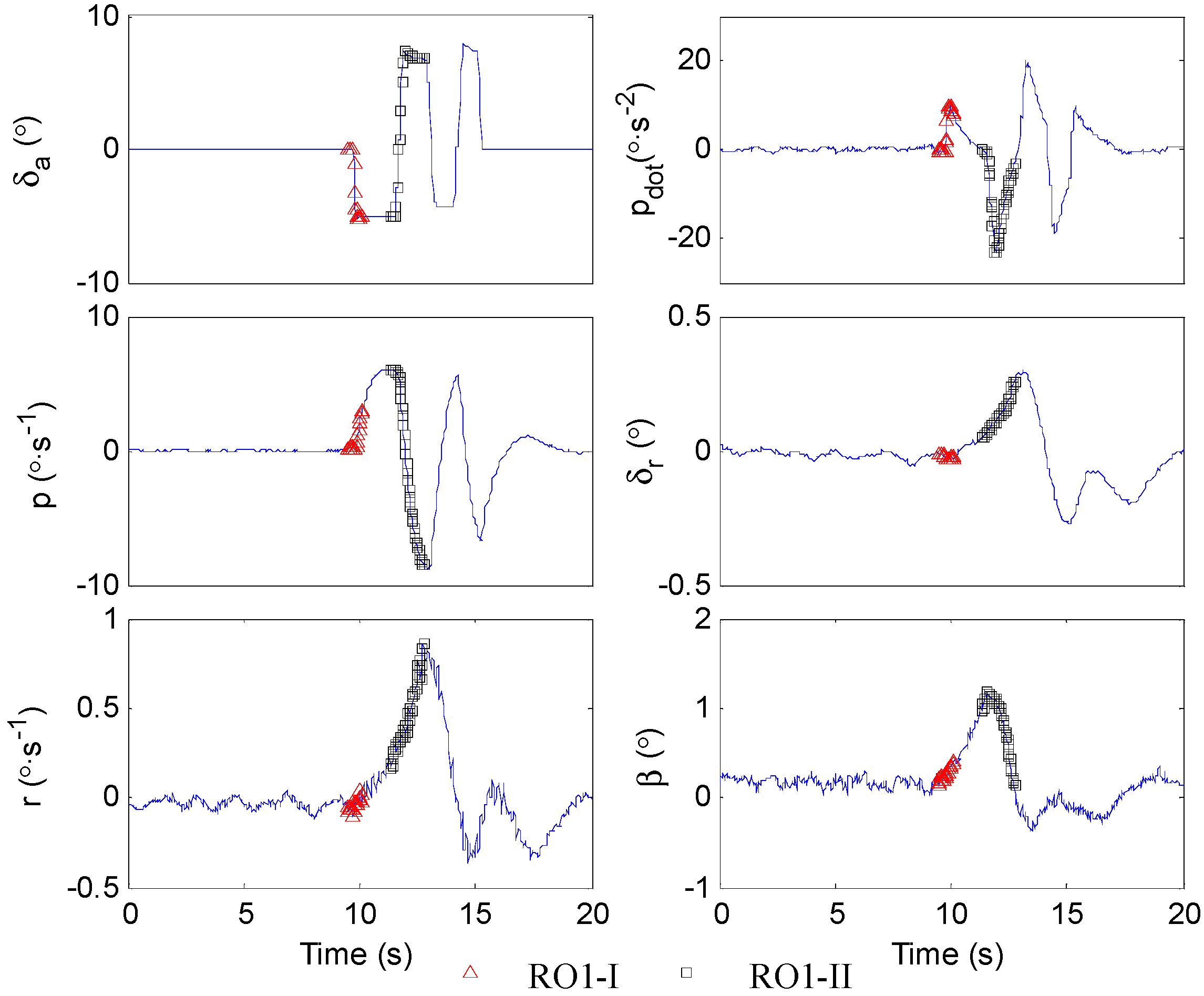
5.2. The Identification of Clδa, Clp
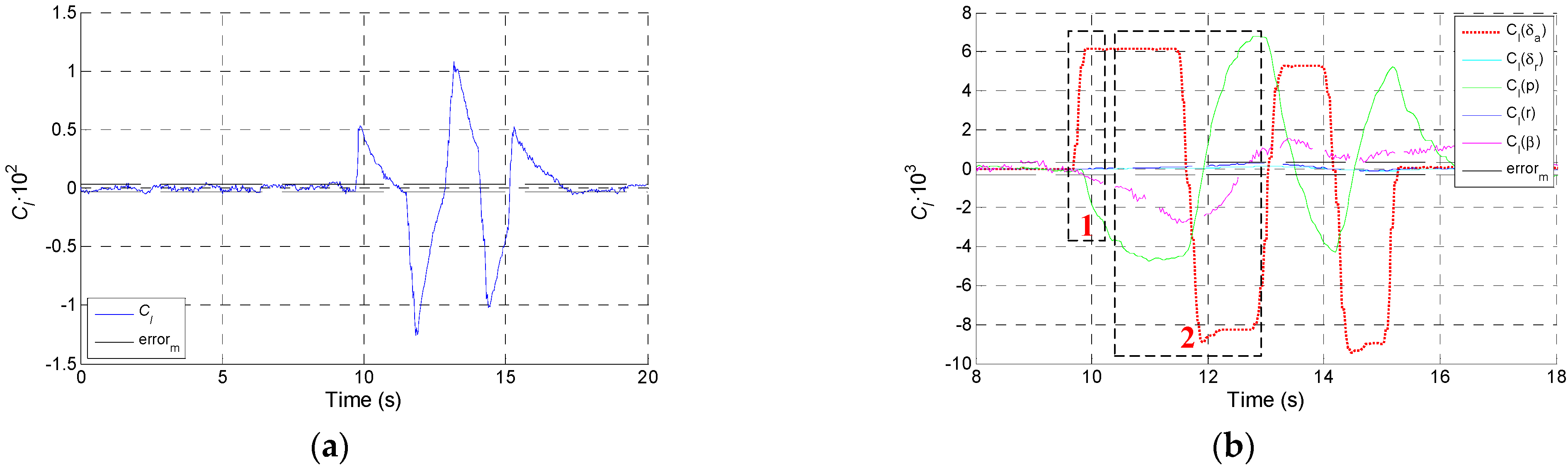
5.2.1. Data Segmentation
5.2.2. The Adaptation of Data Segments and Identification Models
5.2.3. Parameter Estimation
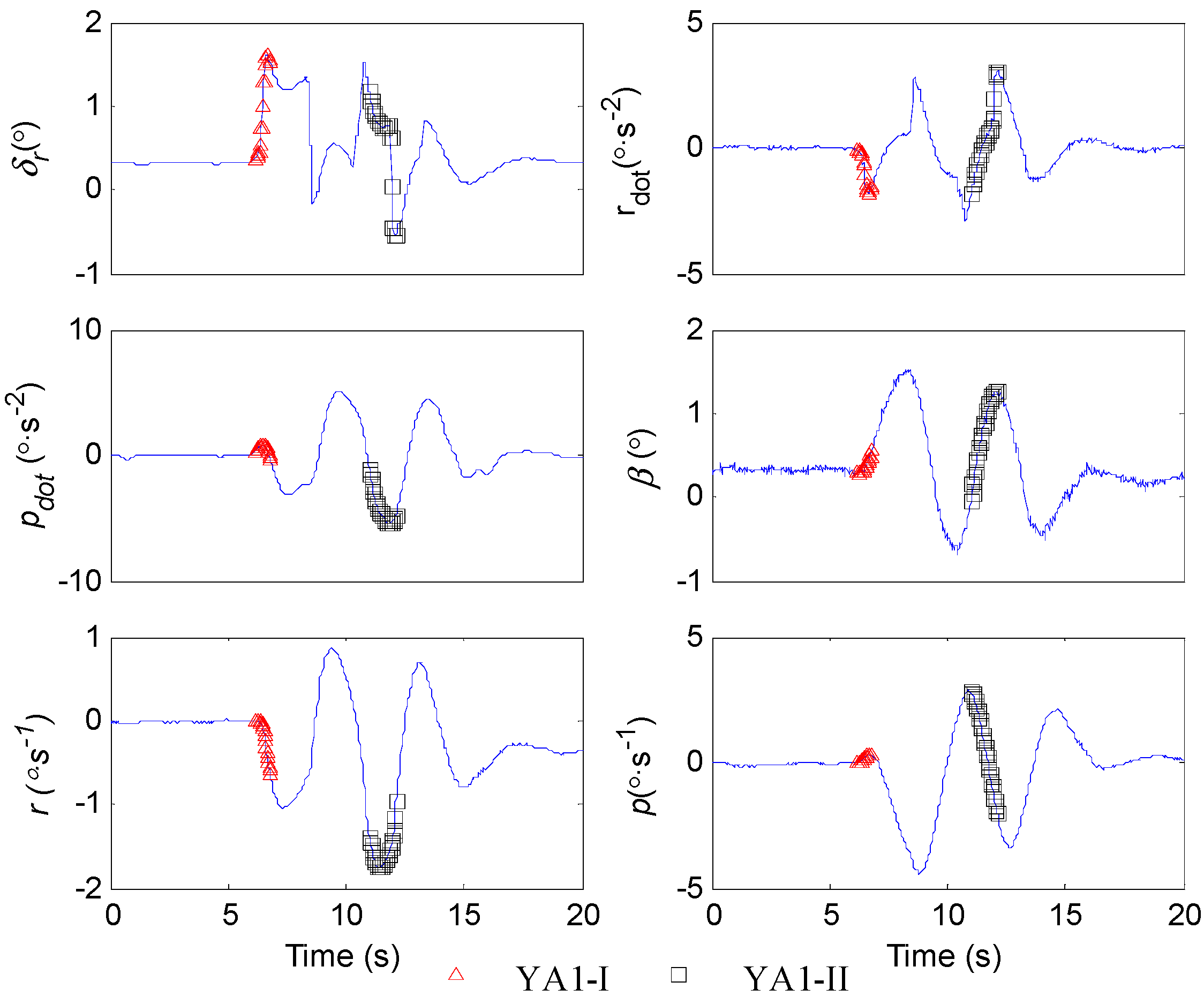
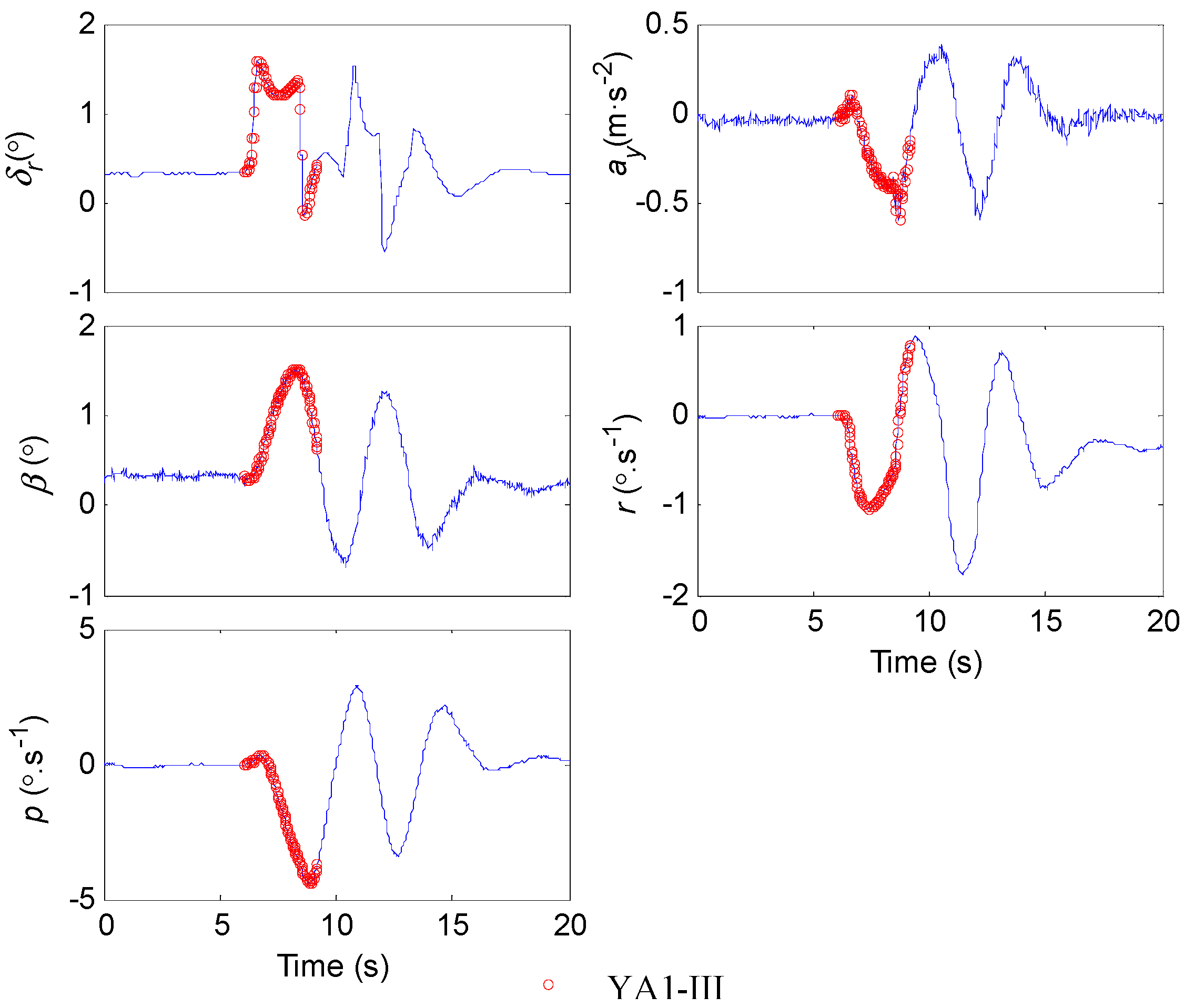
5.3. The Identification of Cnδr, Clδr, Cnβ, Cnr, CYδr and CYβ
5.4. Solution of Clβ and Cnδa
5.5. Identification of Cross Derivatives
6. Validation of the Identification Results
6.1. Comparison and Analysis of Identification Results
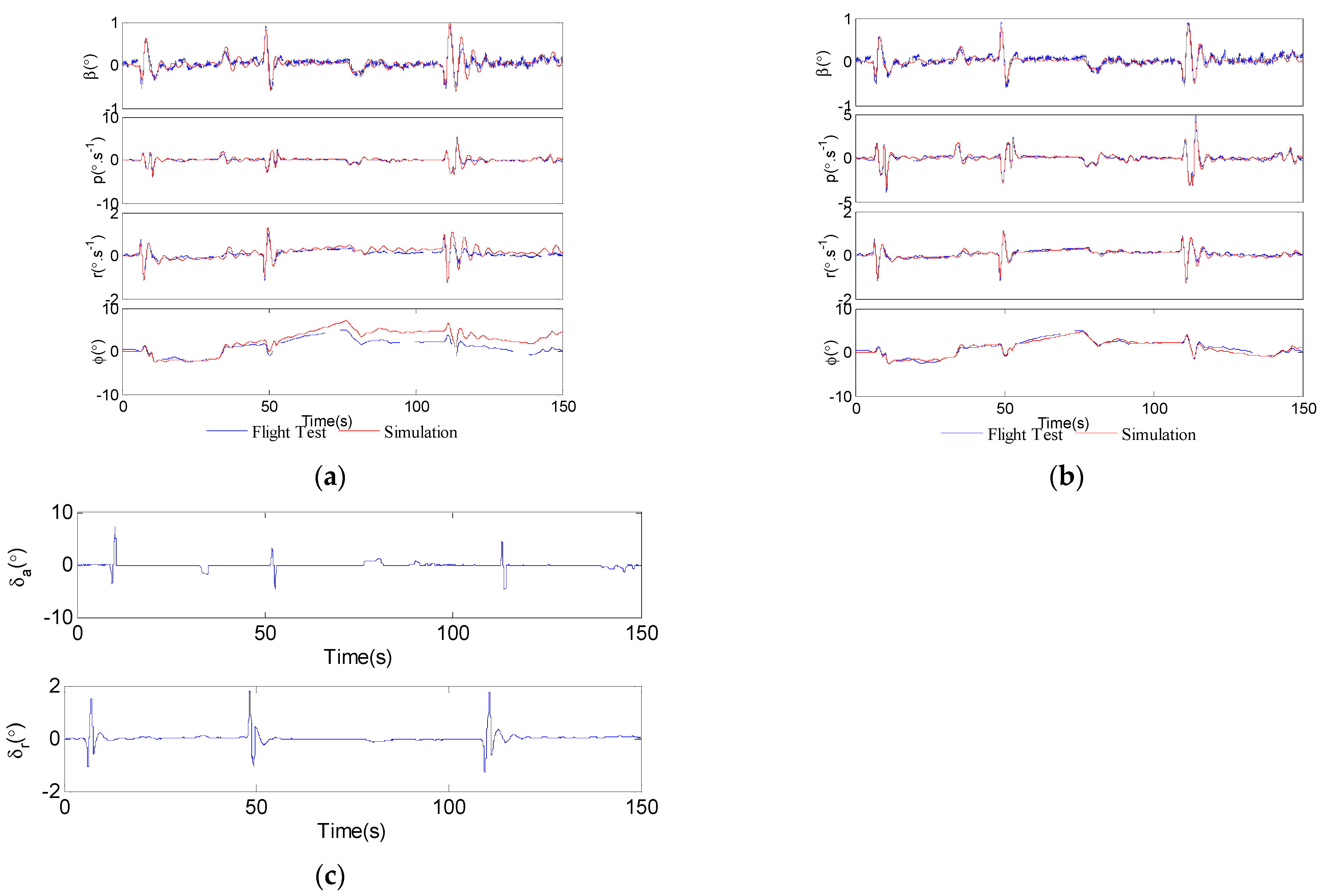
6.2. Validation of the Identification Results
7. Conclusions
- (1)
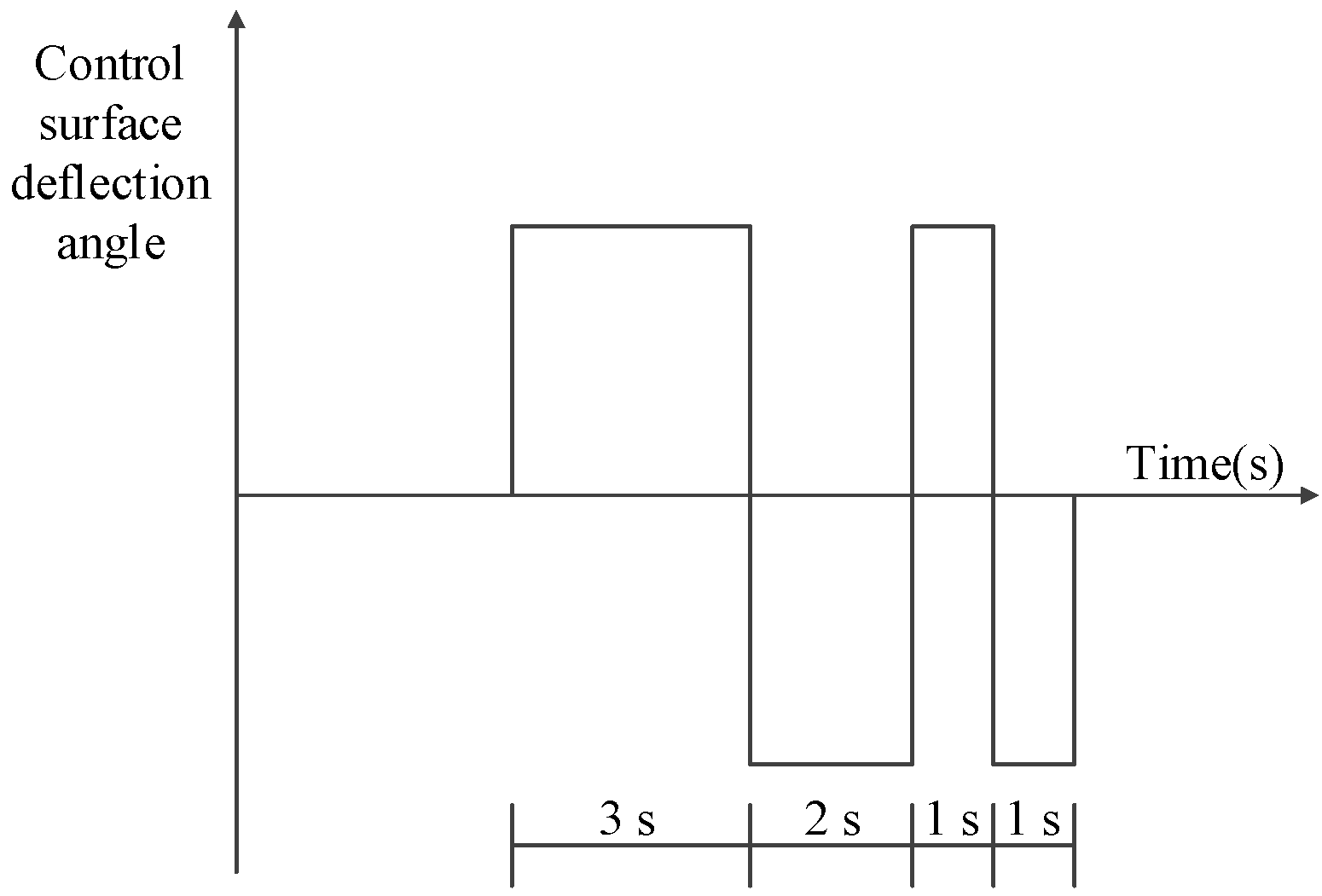
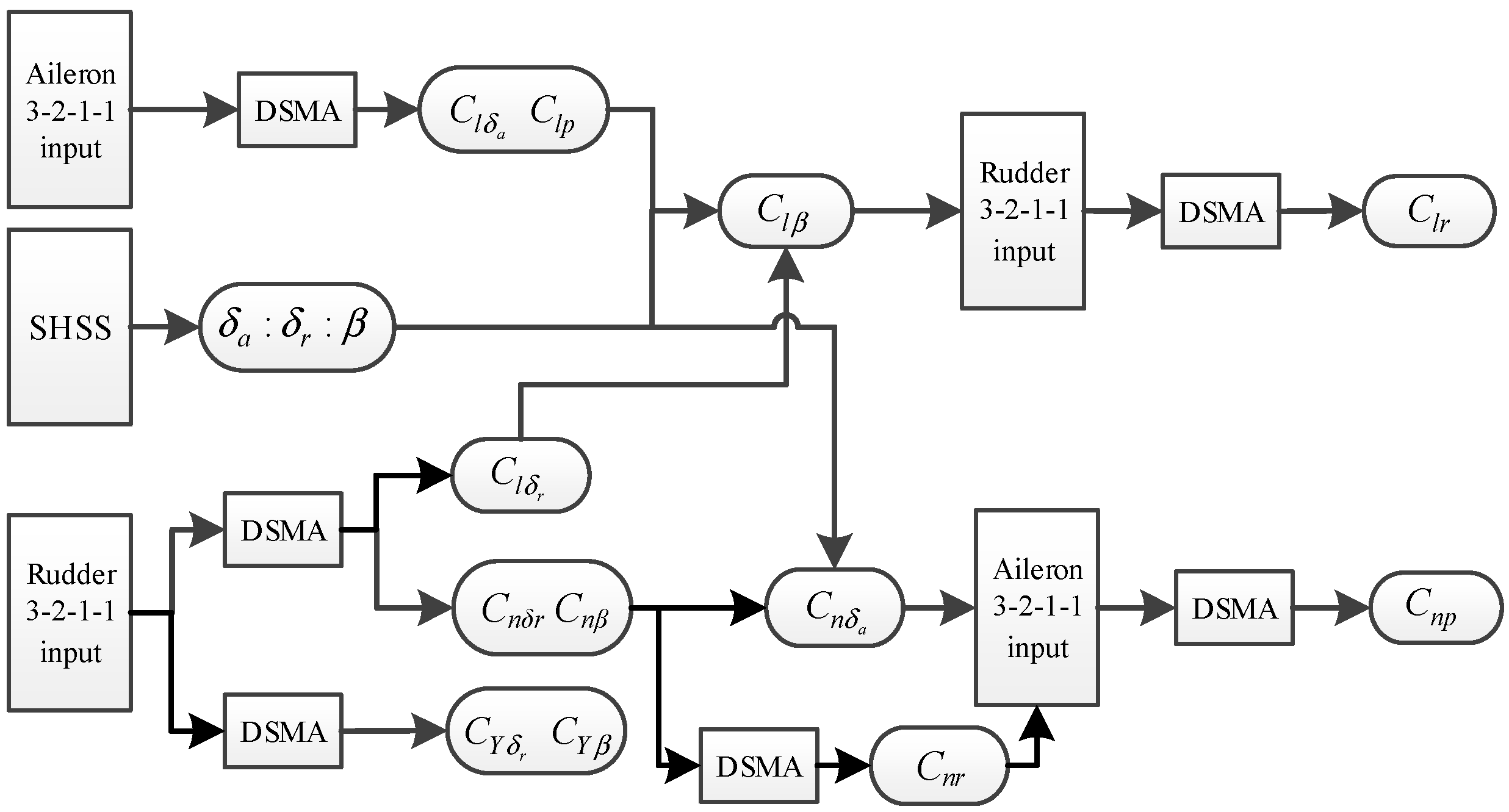
- The step-by-step lateral-directional aerodynamic parameter identification procedure is established. First, Clδa and Clp are identified by the 3-2-1-1 aileron input; at the same time, CYδr, CYβ, Cnδr, Cnβ, Cnr and Clδr are identified by the 3-2-1-1 rudder input. Next, Clβ and Cnδa are solved through the ratio between sideslip angle, aileron deflection angle and rudder deflection angle in steady heading sideslip. Finally, the identification results gained in the steps above are used as prior constraints for the identification of cross derivative Cnp and Clr.
- (2)
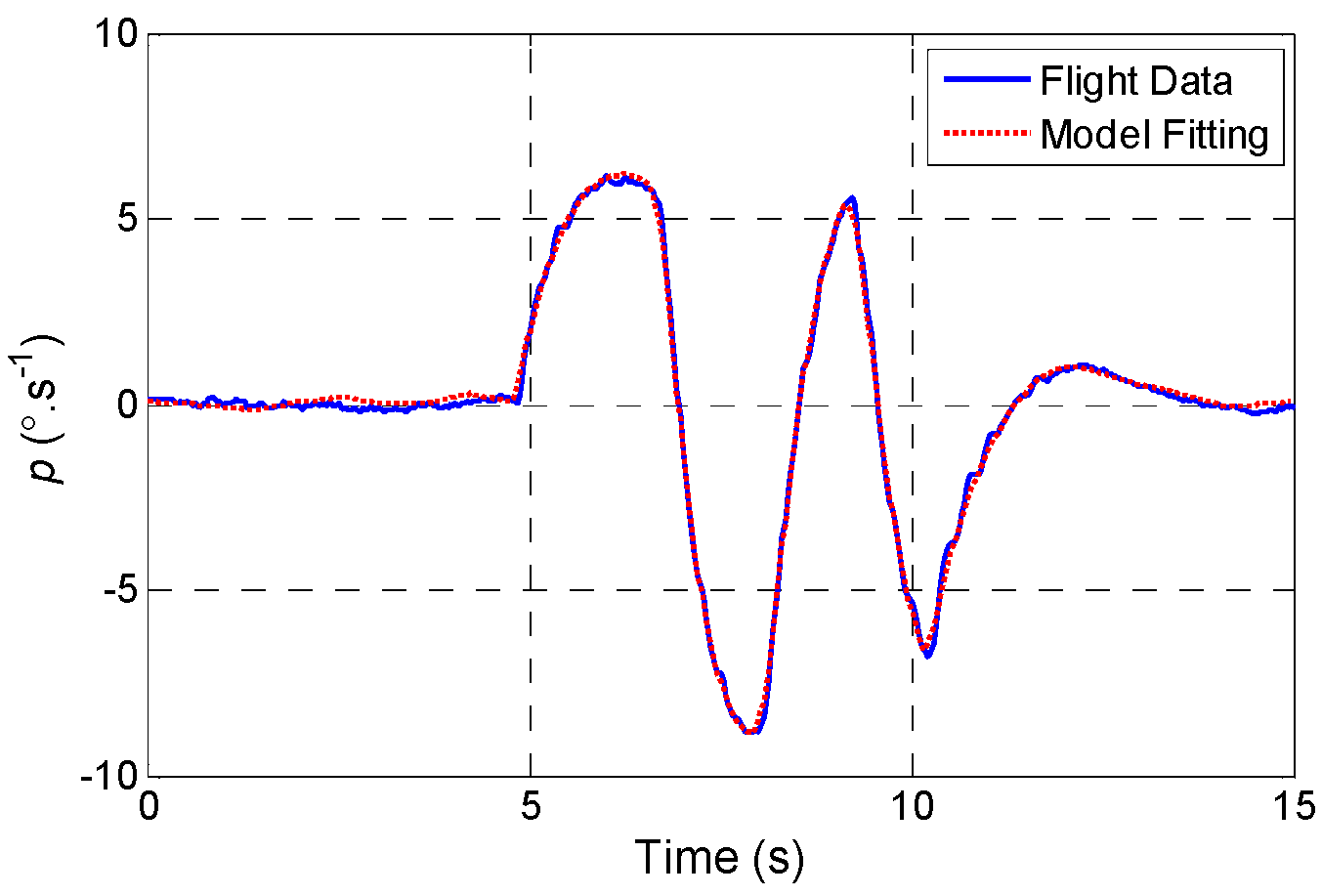
- The angular acceleration estimation method based on the angular velocity equivalent model is established. Firstly, an angular velocity equivalent model is established based on the generic aerodynamic moment model and the rotational dynamics equations of aircraft, and the unknown parameters in the model are iterated to make the angular velocity response of the model fit the angular velocity flight data. Then, the time delay between angular velocity data and control surface deflection data is calibrated by using the cross-correlation function between the angular acceleration response of the angular velocity equivalent model and the differential signal of angular velocity data. Finally, the unknown parameters are iterated once again to fit angular velocity data using the calibrated control surface deflection data, and the angular acceleration of the equivalent model at this moment is used as the estimated angular acceleration for aerodynamic parameter identification when conducting flight tests.
- (3)
- An aerodynamic parameter identification method using segmented adaptation of identification model and flight test data is established. First, the flight test data is segmented preliminarily according to the components as well as the magnitude of aerodynamic force and moment coefficients generated by each variable. Secondly, the scope of data segmentation and the structure of the identification model is determined by stepwise regression and model-fitting metrics combination. Thirdly, the aerodynamic derivative is estimated in stages through the ordinary least squares method and least squares mixed estimator according to the established identification and solving procedure, and Clβ and Cnδa are solved by using the constraint of steady heading sideslip and the accurate prior identification results.
- (4)
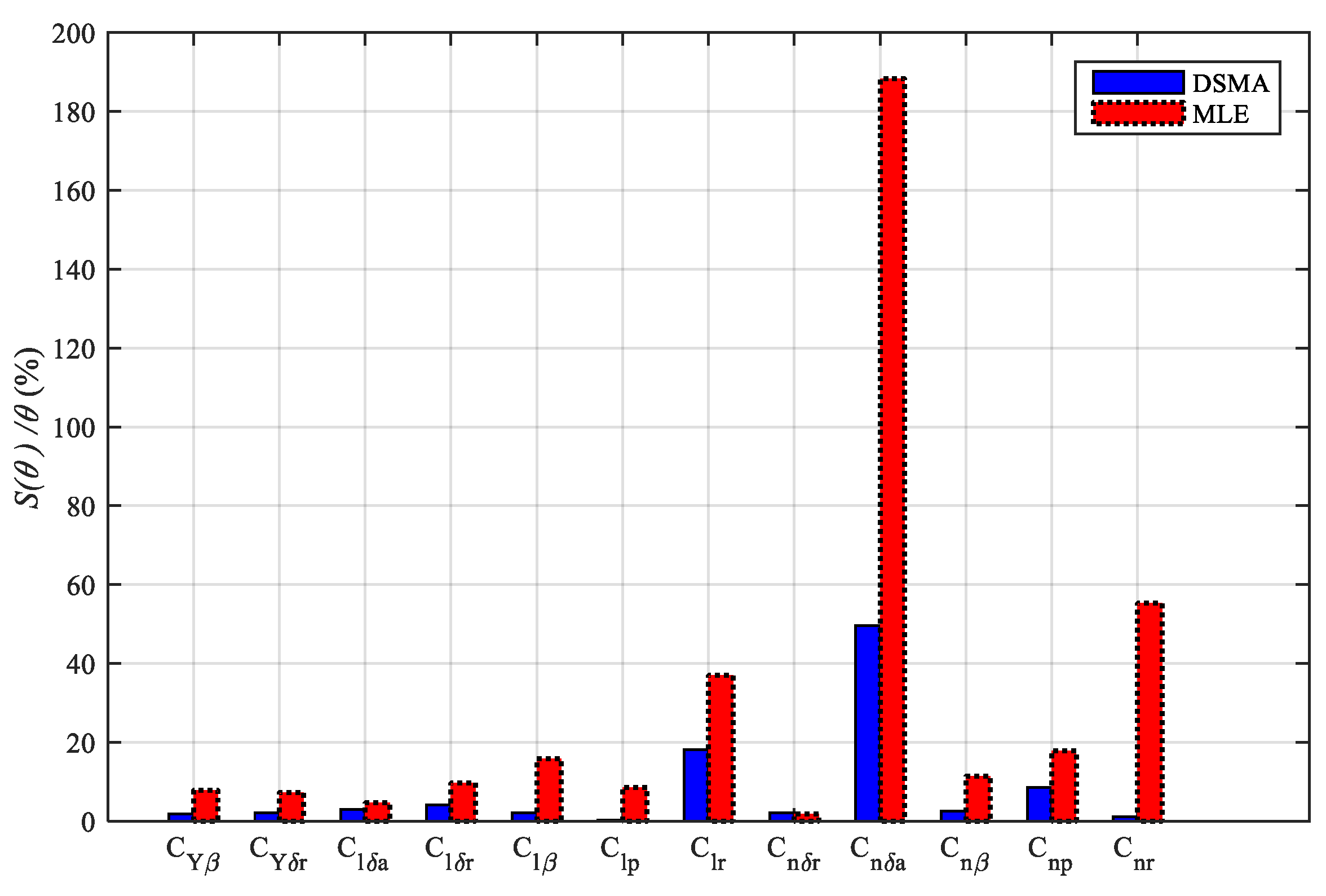
- The identification and validation of lateral-directional aerodynamic derivatives are carried out with the DSMA identification method and the conventional MLE identification method. Compared with the conventional MLE method, the lateral-directional aerodynamic derivatives obtained by the DSMA identification method have a higher accuracy and consistency because valid data segments with good identifiability are selected and the obtained accurate identification results and steady heading sideslip trim results are used as prior constraints. Especially for derivatives with small absolute value and slight contribution to aircraft motion, the improvement of identification accuracy is more significant.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Cl | rolling moment coefficient |
| Cm | pitch moment coefficient |
| Cn | yaw moment coefficient |
| CY | side force coefficient |
| roll angular acceleration (°/s2) | |
| pitch angular acceleration (°/s2) | |
| yaw angular acceleration (°/s2) | |
| ay | side acceleration (m/s2) |
| α | attack angle (°) |
| β | sideslip angle (°) |
| p | roll velocity (°/s) |
| q | pitch velocity (°/s) |
| r | yaw velocity (°/s) |
| dimensionless roll velocity | |
| dimensionless pitch velocity | |
| dimensionless yaw velocity | |
| δa | aileron deflection angle (°) |
| δe | elevator deflection angle (°) |
| δr | rudder deflection angle (°) |
| ρ | air density (kg/m3) |
| dynamic pressure (Pa) | |
| S | reference wing area (m2) |
| b | wingspan (m) |
| Ixx | moment of inertia with respect to roll axis (kg·m2) |
| Iyy | moment of inertia with respect to pitch axis (kg·m2) |
| Izz | moment of inertia with respect to yaw axis (kg·m2) |
| Ixz | product of inertia (kg·m2) |
| CYβ | side force derivative |
| CYδr | rudder side force control derivative |
| CYr | side force derivative due to yaw |
| CYp | side force derivative due to rolling |
| Clβ | lateral stability derivative |
| Clδa | aileron rolling control derivative |
| Clδr | rudder rolling control derivative |
| Clr | rolling cross derivative |
| Clp | rolling damping derivative |
| Cnβ | directional stability derivative |
| Cnδa | aileron yaw control derivative |
| Cnδr | rudder yaw control derivative |
| Cnr | yaw damping derivative |
| Cnp | yaw cross derivative |
References
- Klein, V.; Morelli, E.A. Regression Methods. In Aircraft System Identification—Theory and Practice; AIAA Education Series; AIAA: Reston, VA, USA, 2006; pp. 95–180. [Google Scholar]
- Strutz, T. Uncertainty of Results. In Data Fitting and Uncertainty: A Practical Introduction to Weighted Least Squares and Beyond; Vieweg + Teubner Verlag: Wiesbaden, Germany, 2011; pp. 105–123. [Google Scholar]
- Liu, S.F.; Luo, Z.; Moszczynski, G.; Grant, P.R. Parameter Estimation for Extending Flight Models into Post-Stall Regime—Invited. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Saderla, S.; Kim, Y.; Ghosh, A.K. Online system identification of mini cropped delta UAVs using flight test methods. Aerosp. Sci. Technol. 2018, 80, 337–353. [Google Scholar] [CrossRef]
- Zanette, J.V.; Almeida, F.D. RealSysId: A software tool for real-time aircraft model structure selection and parameter estimation. Aerosp. Sci. Technol. 2016, 54, 302–311. [Google Scholar] [CrossRef]
- Federal Aviation Administration (2018). Full Flight Simulator (FFS) Objective Tests QPS REQUIREMENTS. In CFR Part 60, Flight Simulation Training Device Initial and Continuing Qualification; USA. 2016; pp. 97–98. Available online: https://www.ecfr.gov/current/title-14/chapter-I/subchapter-D/part-60 (accessed on 10 June 2022).
- Sousa, M.S.; Paula, A.A. Matching of Aerodynamic databank with Flight test data-Latero-directional Dynamics. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Morelli, E.A.; Klein, V. Application of System Identification to Aircraft at NASA Langley Research Center. J. Aircr. 2005, 42, 12–25. [Google Scholar] [CrossRef]
- Sieberling, S.; Chu, Q.P.; Mulder, J.A. Robust Flight Control Using Incremental Nonlinear Dynamic Inversion and Angular Acceleration Prediction. J. Guid. Control Dyn. 2010, 33, 1732–1742. [Google Scholar] [CrossRef]
- Jatiningrum, D.; Lu, P.; Chu, Q.P.; Mulder, M. Development of a New Method for Calibrating an Angular Accelerometer Using a Calibration Table. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Levant, A. Robust Exact Differentiation via Sliding Mode Technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Nicolosi, F.; Marco, A.D.; Sabetta, V.; Vecchia, P.D. Roll performance assessment of a light aircraft: Flight simulations and flight tests. Aerosp. Sci. Technol. 2018, 76, 471–483. [Google Scholar] [CrossRef]
- Morelli, E.A. Global nonlinear aerodynamic modeling using multivariate orthogonal functions. J. Aircr. 1995, 32, 270–277. [Google Scholar] [CrossRef]
- Morelli, E.A.; Cunningham, K.; Hill, M.A. Global Aerodynamic Modeling for Stall/Upset Recovery Training Using Efficient Piloted Flight Test Techniques. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Grauer, J.A.; Morelli, E.A. Generic Global Aerodynamic Model for Aircraft. J. Aircr. 2015, 52, 13–20. [Google Scholar] [CrossRef]
- Williamson, W.E.; Mcdowell, J.L. Instrument modeling for aerodynamic coefficient identification from flight test data. J. Guid. Control Dyn. 2015, 3, 275–279. [Google Scholar] [CrossRef]
- Dang, X.W.; Tang, P. Incremental nonlinear dynamic inversion control and flight test based on angular acceleration estimation. Acta Aeronaut. Astronaut. Sin. 2020, 41, 323534. [Google Scholar]
- Grauer, J.A. Real-Time Data-Compatibility Analysis Using Output-Error Parameter Estimation. J. Aircr. 2015, 52, 940–947. [Google Scholar] [CrossRef]
- Morelli, E.A. Real-Time Aerodynamic Parameter Estimation Without Air Flow Angle Measurements. J. Aircr. 2012, 49, 1064–1074. [Google Scholar] [CrossRef]
- Chowdhary, G.; Jategaonkar, R. Aerodynamic parameter estimation from flight data applying extended and unscented Kalman filter. Aerosp. Sci. Technol. 2010, 14, 106–117. [Google Scholar] [CrossRef]
- Oliveira, J.; Chu, Q.P.; Mulder, J.A.; Balini, H.M.N.K.; Vos, W.G.M. Output Error Method and Two Step Method for Aerodynamic Model Identification. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005. [Google Scholar]
- Parameswaran, V.; Girija, G.; Raol, J. Estimation of Parameters from Large Amplitude Maneuvers with Partitioned Data for Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Austin, TX, USA, 11–14 August 2003. [Google Scholar]
- Simmons, B.M.; McClelland, H.G.; Woolsey, C.A. Nonlinear Model Identification Methodology for Small, Fixed-Wing, Unmanned Aircraft. J. Aircr. 2019, 56, 1056–1067. [Google Scholar] [CrossRef]
- Lombaerts, T.J.J.; Oort, E.V.; Chu, Q.P.; Mulder, J.A.; Joosten, D.A. Online Aerodynamic Model Structure Selection and Parameter Estimation for Fault Tolerant Control. J. Guid. Control Dyn. 2010, 33, 707–723. [Google Scholar] [CrossRef]
- Mann, P.S. Introductory Statistics, 8th ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1995; pp. 100–106. [Google Scholar]
- Etkin, B.; Reid, L.D. Dynamics of Flight-Stability and Control, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1996; pp. 107–120. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cl | Cm | Cn | ||
|---|---|---|---|---|
| θ1 = −0.16 | θ6 = 0.03 | θ7 = −1.49 | θ16 = 0.17 | θ17 = −0.22 |
| θ2 = −0.46 | θ8 = −40.68 | θ9 = −2.09 | θ18 = −0.47 | θ19 = 0.004 |
| θ3 = 0.59 | θ10 = −0.5 | θ11 = 0 | θ20 = −0.19 | θ21 = 0 |
| θ4 = −0.086 | θ12 = 0 | θ13 = 0 | θ22 = 0 | |
| θ5 = 0.023 | θ14 = 0 | θ15 = 0 | ||
| Cl | Cm | Cn | ||
|---|---|---|---|---|
| θ1 = −0.18 | θ6 = 0.05 | θ7 = −1.03 | θ16 = 0.11 | θ17 = −0.22 |
| θ2 = −0.37 | θ8 = 30.29 | θ9 = −2.12 | θ18 = −0.32 | θ19 = 0.51 |
| θ3 = 0.68 | θ10 = −80.80 | θ11 = −24.49 | θ20 = −0.19 | θ21 = −0.43 |
| θ4 = −0.078 | θ12 = 0.045 | θ13 = 5.17 | θ22 = 27.5 | |
| θ5 = 0.039 | θ14 = −0.01 | θ15 = 0 | ||
| The Number of Dataset | RO1 + YA1 | AR1 | RO2 + YA2 | AR2 | RO3 + YA3 | AR3 | RO4 + YA4 | AR4 |
|---|---|---|---|---|---|---|---|---|
| Estimation Method | DSMA (×10−3/°) | MLE (×10−3/°) | DSMA (×10−3/°) | MLE (×10−3/°) | DSMA (×10−3/°) | MLE (×10−3/°) | DSMA (×10−3/°) | MLE (×10−3/°) |
| CYδr | 7.83 | 7.42 | 7.52 | 8.31 | 7.77 | 7.68 | 7.82 | 8.82 |
| CYβ | −20.5 | −21.9 | −19.8 | −24.3 | −20.8 | −21.9 | −20.3 | −20.4 |
| Clδa | −1.15 | −1.33 | −1.17 | −1.38 | −1.11 | −1.36 | −1.19 | −1.24 |
| Clδr | 0.90 | 0.89 | 0.93 | 0.84 | 0.98 | 0.77 | 0.90 | 0.97 |
| Clβ | −3.52 | −3.69 | −3.59 | −4.83 | −3.44 | −3.53 | −3.61 | −4.66 |
| Clp | −6.17 | −6.47 | −6.17 | −7.17 | −6.14 | −6.14 | −6.14 | −7.39 |
| Clr | 3.34 | 4.88 | 4.28 | 1.82 | 3.44 | 4.37 | 2.76 | 4.91 |
| Cnδr | −3.13 | −3.31 | −2.99 | −3.41 | −3.12 | −3.44 | −3.11 | −3.45 |
| Cnδa | 0.09 | 0.06 | 0.16 | −0.17 | 0.11 | −0.05 | 0.04 | −0.04 |
| Cnβ | 3.12 | 3.47 | 3.15 | 2.62 | 3.14 | 3.14 | 2.98 | 3.02 |
| Cnp | −1.70 | −2.55 | −1.53 | −3.61 | −1.80 | −2.74 | −1.51 | −2.53 |
| Cnr | −6.53 | −2.73 | −6.41 | −4.33 | −6.58 | −5.72 | −6.50 | −1.25 |
| GOF | β | p | r | ϕ |
|---|---|---|---|---|
| DSMA | 0.8638 | 0.9207 | 0.9260 | 0.9494 |
| MLE | 0.6808 | 0.7350 | 0.5454 | 0.3627 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhao, R.; Zhang, Y. Aircraft Lateral-Directional Aerodynamic Parameter Identification and Solution Method Using Segmented Adaptation of Identification Model and Flight Test Data. Aerospace 2022, 9, 433. https://doi.org/10.3390/aerospace9080433
Wang L, Zhao R, Zhang Y. Aircraft Lateral-Directional Aerodynamic Parameter Identification and Solution Method Using Segmented Adaptation of Identification Model and Flight Test Data. Aerospace. 2022; 9(8):433. https://doi.org/10.3390/aerospace9080433
Chicago/Turabian StyleWang, Lixin, Rong Zhao, and Yi Zhang. 2022. "Aircraft Lateral-Directional Aerodynamic Parameter Identification and Solution Method Using Segmented Adaptation of Identification Model and Flight Test Data" Aerospace 9, no. 8: 433. https://doi.org/10.3390/aerospace9080433