
Application of Adaptive Weighted Strong Tracking Unscented Kalman Filter in Non-Cooperative Maneuvering Target Tracking

Abstract
:1. Introduction
2. Methodology
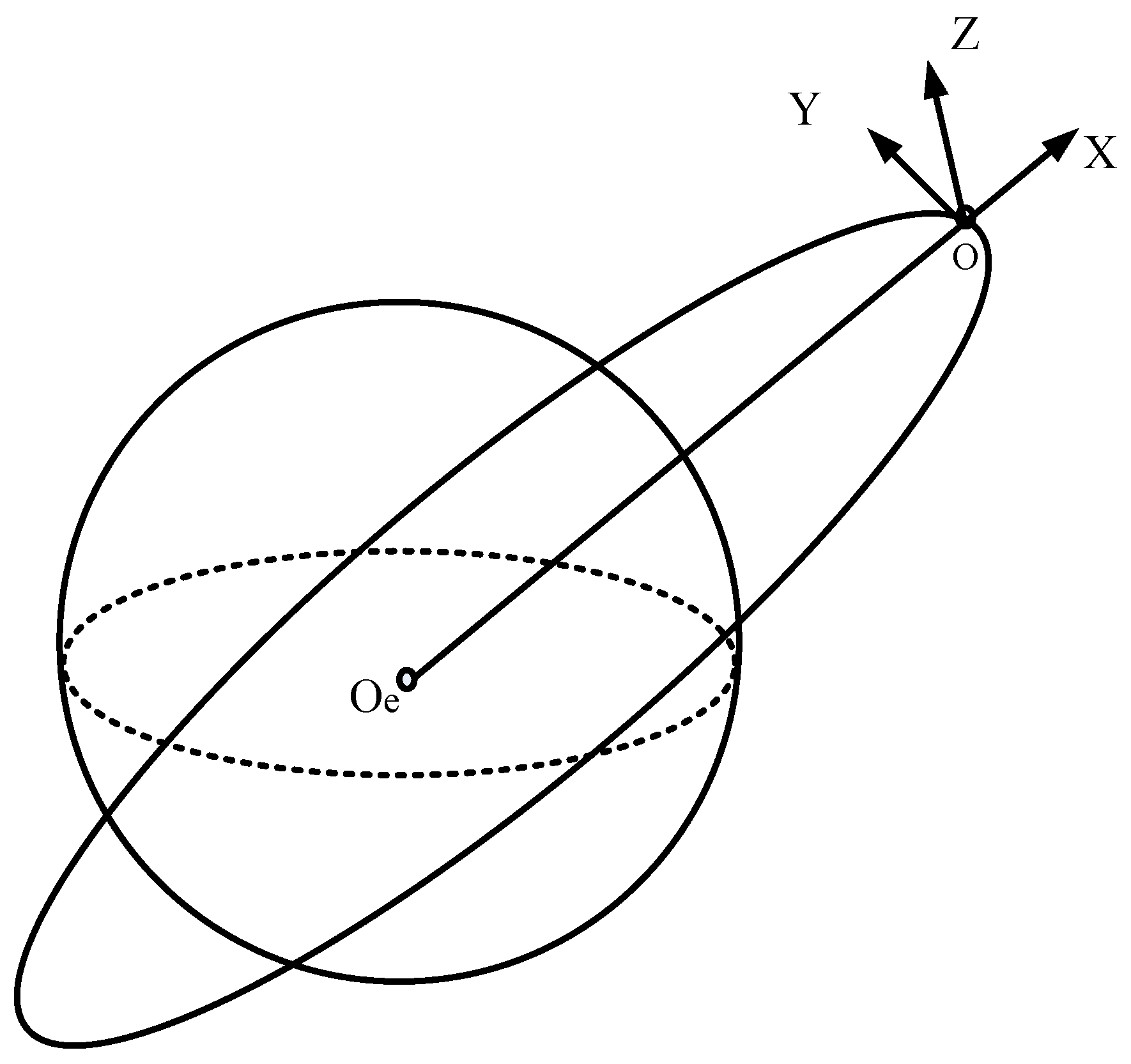
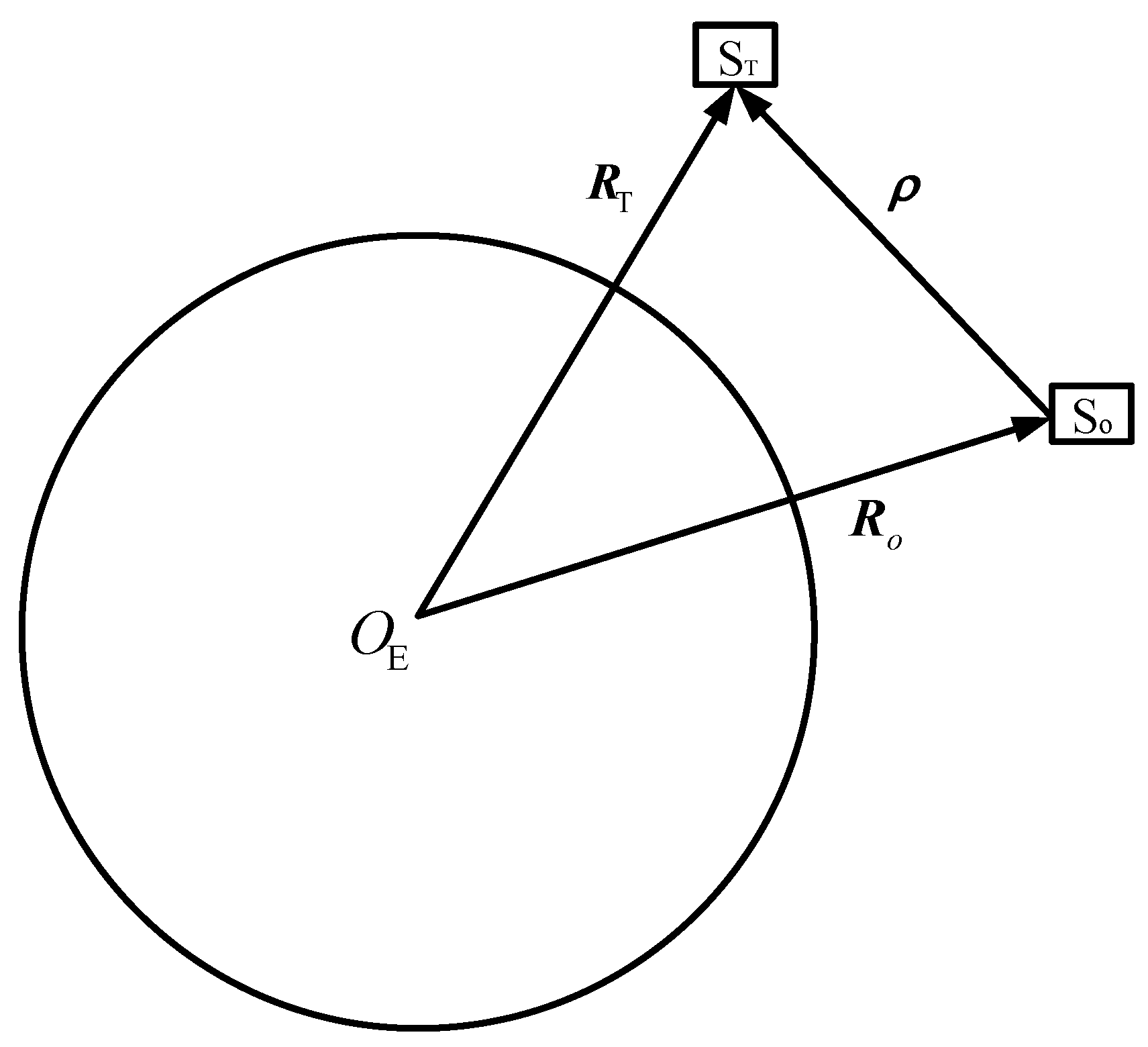
2.1. Relative Navigation Dynamics Equation and Observation Equation
2.2. Adaptive Weighted Strong Tracking Unscented Kalman Filter
2.2.1. Strong Tracking Filter
- (1)
- ,
- (2)
- .
2.2.2. Deficiencies in the Strong Tracking Filter
2.2.3. Adaptive Weighted Strong Tracking Unscented Kalman Filter
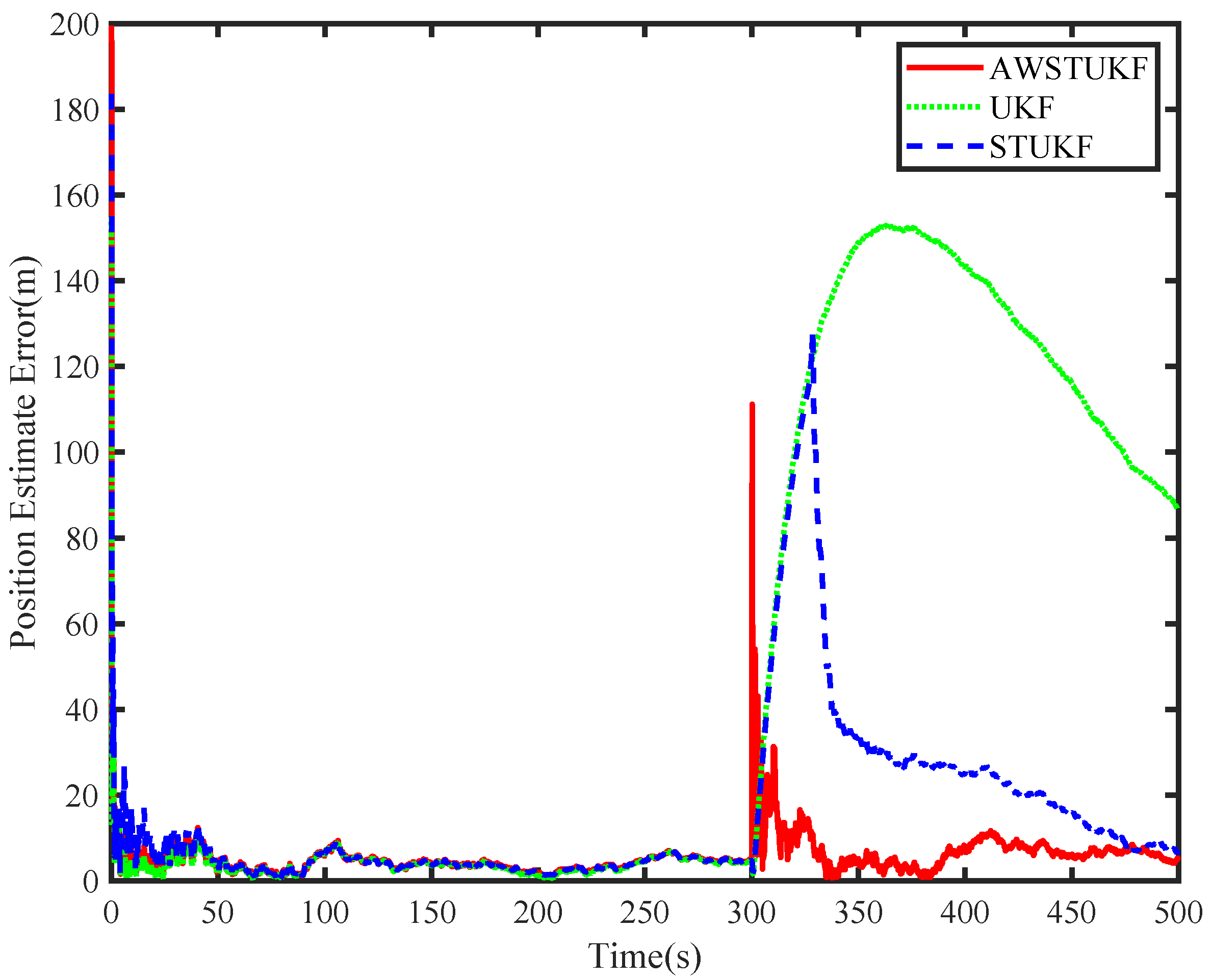
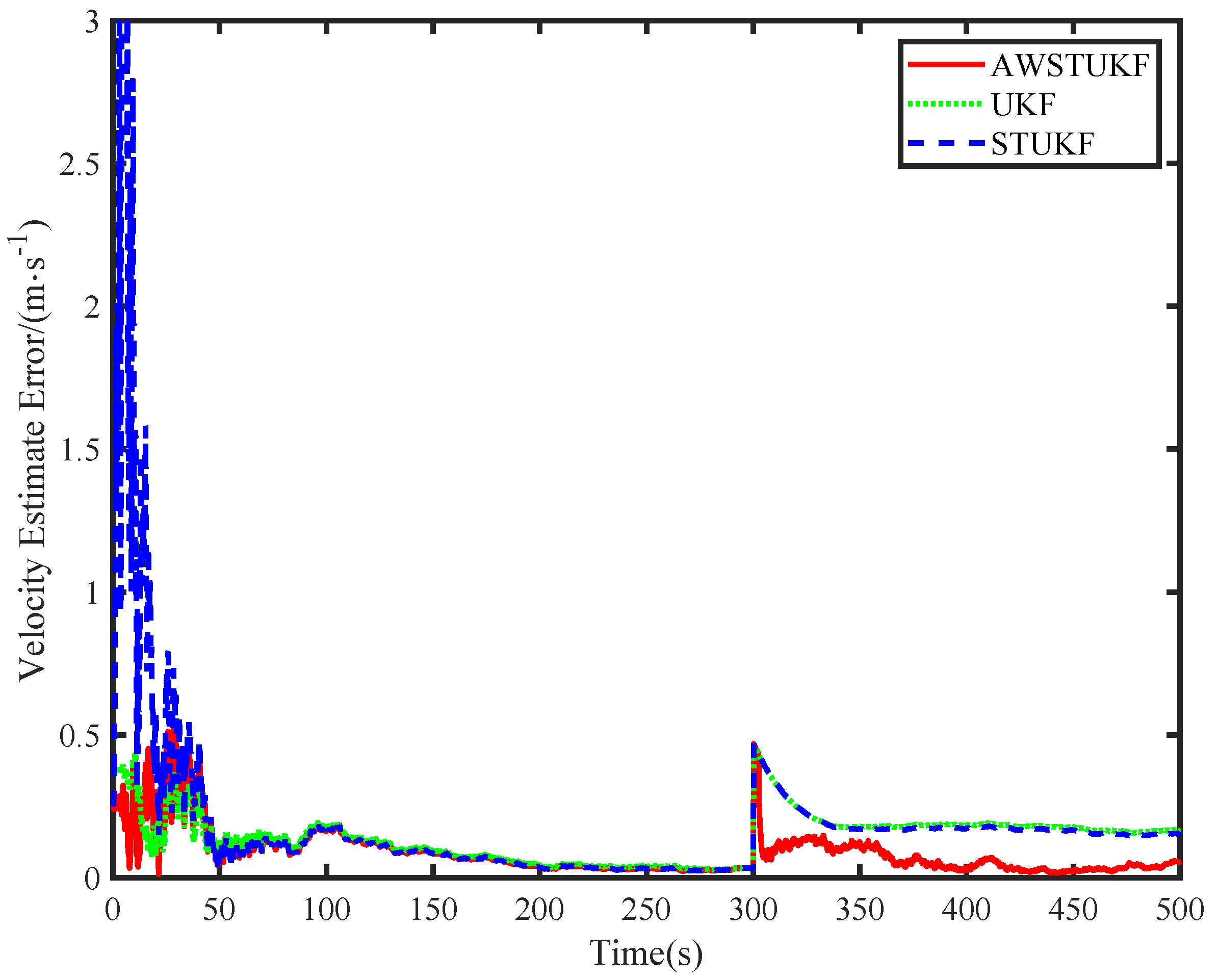
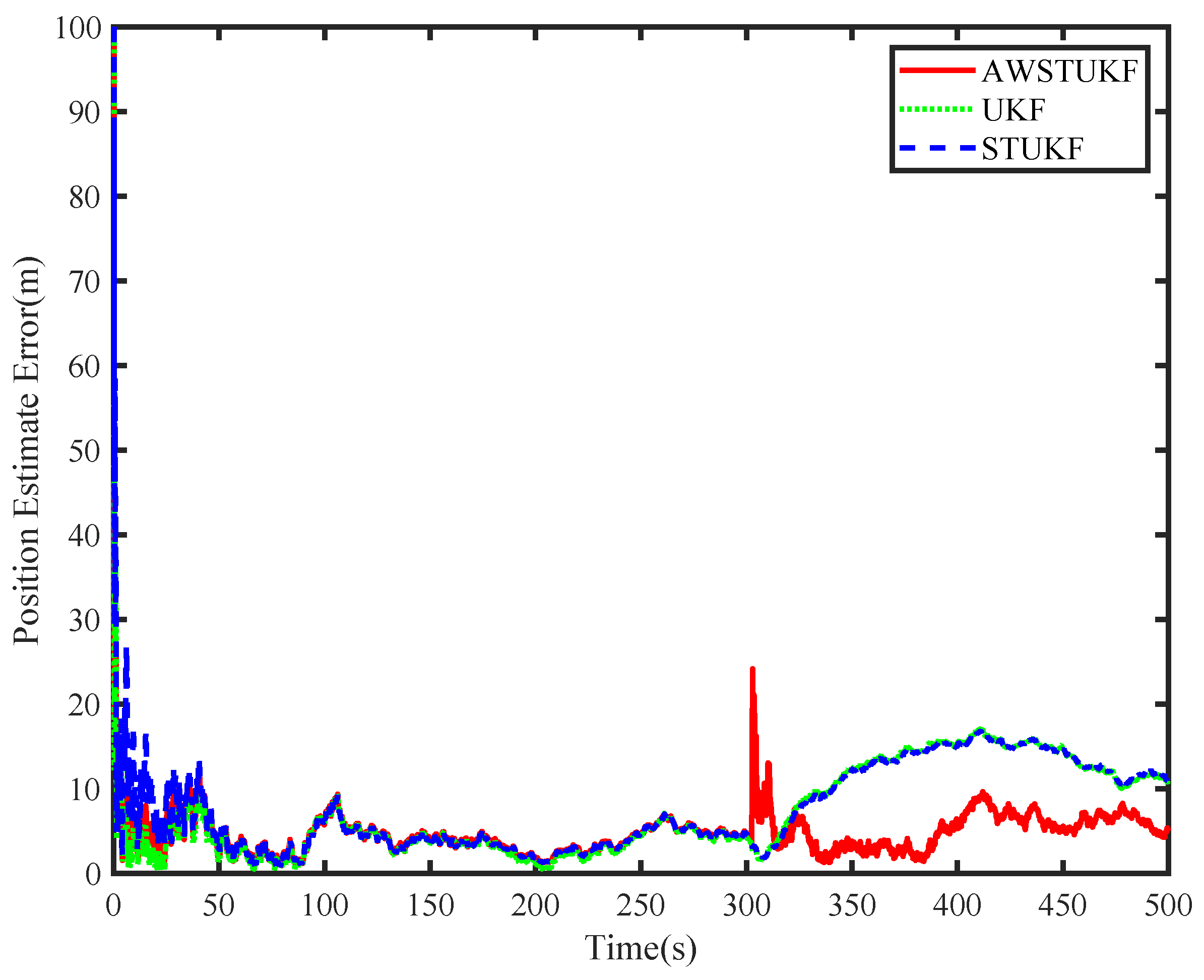
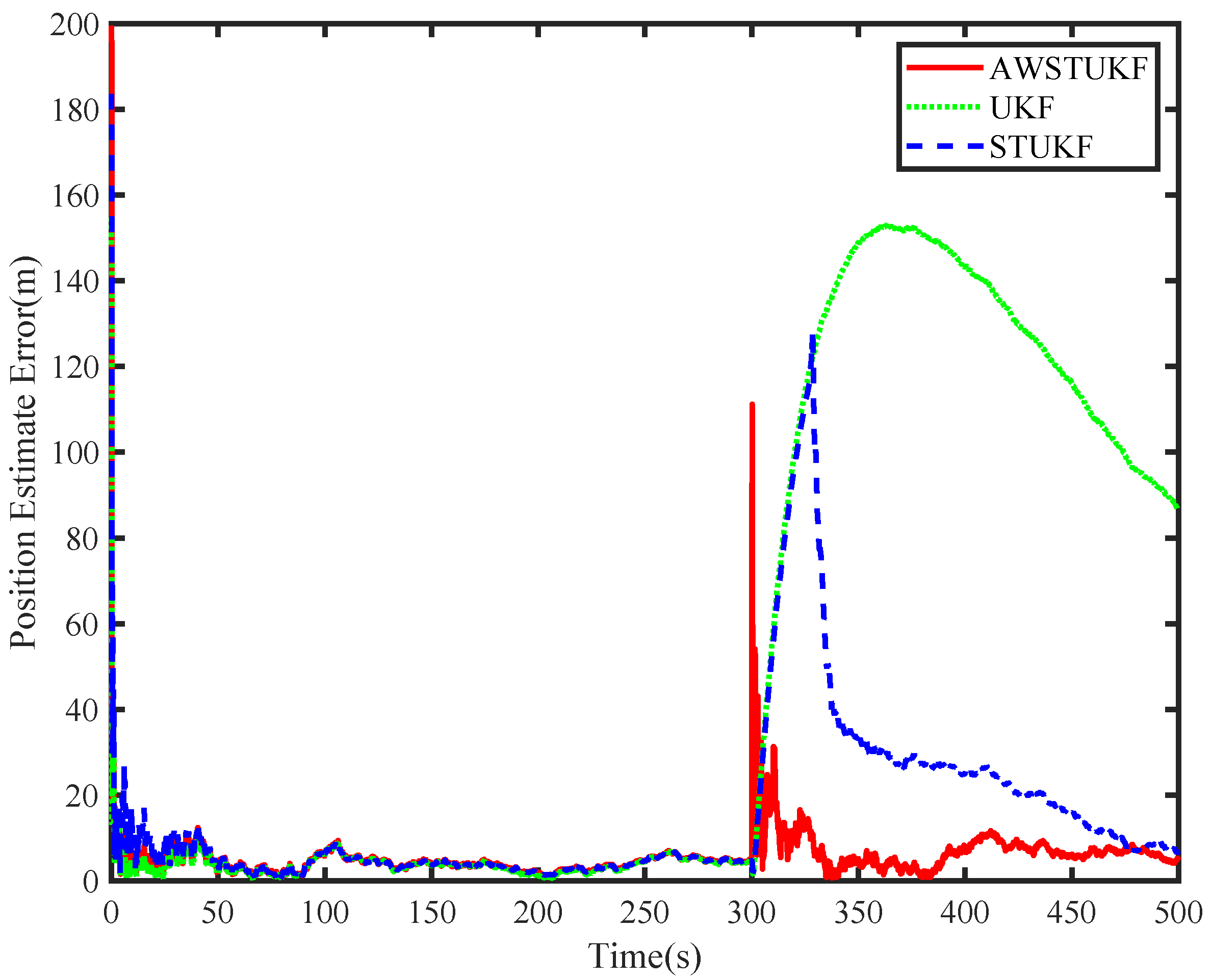
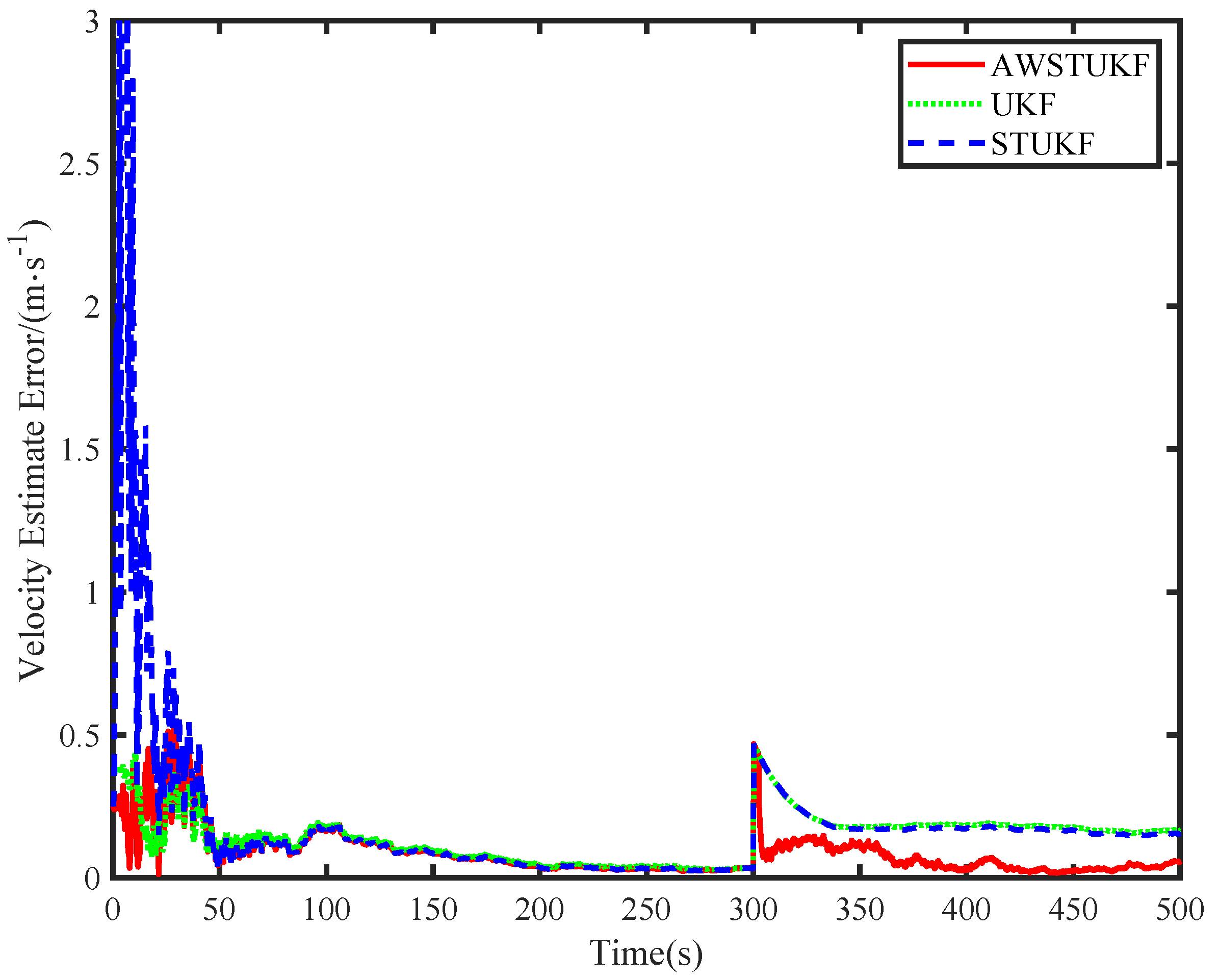
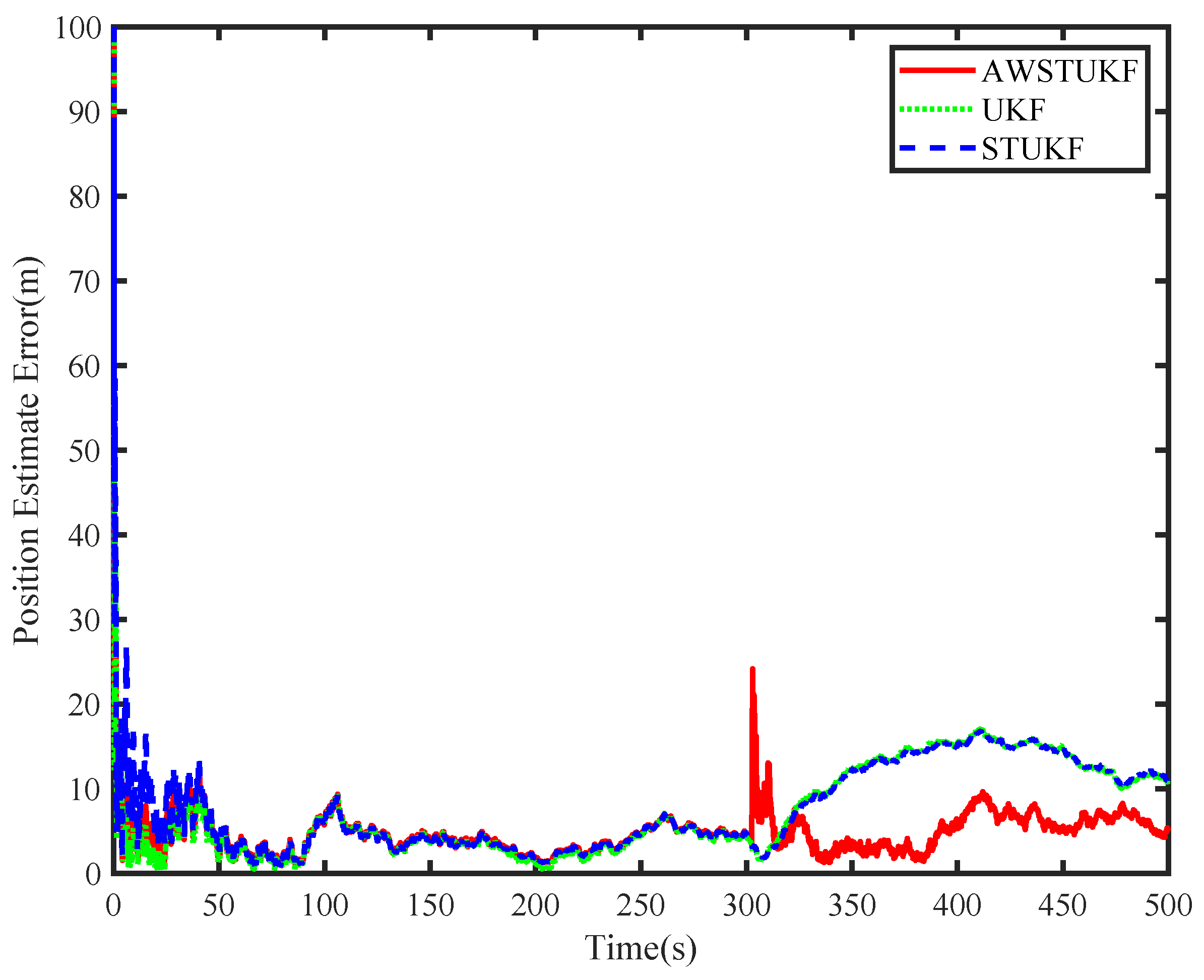
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Florick, D.; Cashin, C. Space Situational Awareness Sharing for the 21st Century. Space News 2013, 24, 17–19. [Google Scholar]
- Bobrinsky, N.; Del Monte, L. The space situational awareness program of the European Space Agency. Cosm. Res. 2010, 48, 392–398. [Google Scholar] [CrossRef]
- Kennewell, J.A.; Vo, B.N. An overview of space situational awareness. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1029–1036. [Google Scholar]
- Chen, M.; Tian, Y.; Wang, H. Recursive Filtering Algorithm for Space Surveillance Tracking Applications. J. Astronaut. 2016, 37, 862–868. [Google Scholar]
- Zhai, G.; Bi, X.; Zhao, H.; Liang, B. Non-cooperative maneuvering spacecraft tracking via a variable structure estimator. Aerosp. Sci. Technol. 2018, 79, 352–363. [Google Scholar] [CrossRef]
- Zhai, G.; Zhao, H.; Wen, Q.; Liang, B. Relative motion and thrust estimation of a non-cooperative maneuvering target with adaptive filter. Acta Astronaut. 2019, 162, 98–108. [Google Scholar] [CrossRef]
- Yin, J.; Yang, Z.; Luo, Y. Adaptive Tracking Method for Non-Cooperative Continuously Thrusting Spacecraft. Aerospace 2021, 8, 244. [Google Scholar] [CrossRef]
- Li, L.; Yang, X.; Li, L. Mid-range relative navigation method for non-cooperative target satellite. J. Jilin Univ. Eng. Technol. Ed. 2008, 38, 986–990. [Google Scholar]
- Kelecy, T.; Jah, M. Detection and orbit determination of a satellite executing low thrust maneuvers. Acta Astronaut. 2010, 66, 798–809. [Google Scholar] [CrossRef]
- Goff, G.M.; Black, J.T.; Beck, J.A. Tracking maneuvering spacecraft with filter-through approaches using interacting multiple models. Acta Astronaut. 2015, 114, 152–163. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, J.; Cao, X.; Wang, F. Optimal satellite formation reconfiguration strategy based on relative orbital elements. Acta Astronaut. 2012, 76, 99–114. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, X.; Ran, D.; Zhao, Y.; Chen, Y.; Bai, Y. Spacecraft formation reconfiguration with multi-obstacle avoidance under navigation and control uncertainties using adaptive artificial potential function method. Astrodynamics 2020, 4, 41–56. [Google Scholar] [CrossRef]
- Dang, Z.; Zhang, H. Linearized relative motion equations through orbital element differences for general Keplerian orbits. Astrodynamics 2018, 2, 201–215. [Google Scholar] [CrossRef]
- Hablani, H.B.; Tapper, M.L.; Dana-Bashian, D.J. Guidance and relative navigation for autonomous rendezvous in a circular orbit. J. Guid. Control Dyn. 2002, 25, 553–562. [Google Scholar] [CrossRef]
- Zorzi, M. Robust Kalman filtering under model perturbations. IEEE Trans. Autom. Control 2016, 62, 2902–2907. [Google Scholar] [CrossRef] [Green Version]
- Schweighart, S.A.; Sedwick, R.J. High-fidelity linearized J model for satellite formation flight. J. Guid. Control Dyn. 2002, 25, 1073–1080. [Google Scholar] [CrossRef]
- Huang, A.Y.; Luo, Y.Z.; Li, H.N. Fast optimization of impulsive perturbed orbit rendezvous using simplified parametric model. Astrodynamics 2021, 5, 391–402. [Google Scholar] [CrossRef]
- Christian, J.A.; Robinson, S.B.; D’Souza, C.N.; Ruiz, J.P. Cooperative relative navigation of spacecraft using flash light detection and ranging sensors. J. Guid. Control Dyn. 2014, 37, 452–465. [Google Scholar] [CrossRef]
- Gaias, G.; D’Amico, S.; Ardaens, J.S. Angles-only navigation to a noncooperative satellite using relative orbital elements. J. Guid. Control Dyn. 2014, 37, 439–451. [Google Scholar] [CrossRef] [Green Version]
- Goff, G.M.; Black, J.T.; Beck, J.A. Orbit estimation of a continuously thrusting spacecraft using variable dimension filters. J. Guid. Control Dyn. 2015, 38, 2407–2420. [Google Scholar] [CrossRef]
- Gong, B.; Li, W.; Li, S.; Ma, W.; Zheng, L. Angles-only initial relative orbit determination algorithm for non-cooperative spacecraft proximity operations. Astrodynamics 2018, 2, 217–231. [Google Scholar] [CrossRef]
- Cao, L.; Chen, X.; Misra, A.K. A novel unscented predictive filter for relative position and attitude estimation of satellite formation. Acta Astronaut. 2015, 112, 140–157. [Google Scholar] [CrossRef]
- Cinelli, M.; Ortore, E.; Laneve, G.; Circi, C. Geometrical approach for an optimal inter-satellite visibility. Astrodynamics 2021, 5, 237–248. [Google Scholar] [CrossRef]
- Kilic, C.; Christian, J.A. Spacecraft relative navigation using only range-rate measurements. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017; p. 1518. [Google Scholar]
- Zhou, D.; Xi, Y.; Zhang, Z. Suboptimal fading extended Kalman filtering for nonlinear systems. Control Decis. 1990, 5, 1–6. [Google Scholar]
- Zhou, D.; Xi, Y.G.; Zhang, Z. A suboptimal multiple fading extended Kalman filter. Acta Autom. Sin. 1991, 17, 689–695. [Google Scholar]
- Wang, X.X.; Zhao, L.; Xia, Q.X.; Hao, Y. Strong tracking filter based on unscented transformation. Control. Decis. 2010, 25, 1063–1068. [Google Scholar]
- Jiang, Y.; Ma, P.; Baoyin, H. Residual-normalized strong tracking filter for tracking a noncooperative maneuvering spacecraft. J. Guid. Control. Dyn. 2019, 42, 2304–2309. [Google Scholar] [CrossRef]
- Huang, P.; Qian, S.; Xie, X.; Sun, S.M. Dynamic relative positioning algorithm for maneuvering spacecraft based on strong tracking filter. Syst. Eng. Electron. 2015, 37, 1140–1145. [Google Scholar]
- Lee, D.J.; Alfriend, K.T. Precise real-time orbit estimation using the unscented Kalman filter. Adv. Astronaut. Sci. 2003, 114, 1853–1872. [Google Scholar]
- Ge, Z.; Yang, Y.; Wen, X. Strong tracking UKF method and its application in fault identification. Chin. J. Sci. Instrum. 2008, 29, 1670–1674. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | STF | STUKF | AWSTF | AWSTUKF |
|---|---|---|---|---|
| 0.5 m/s | ||||
| Position RMSE, m | 13.15 | 12.09 | 6.19 | 5.39 |
| Velocity RMSE, m/s | 0.21 | 0.18 | 0.09 | 0.06 |
| Detection delay, s | none | none | 4.2 | 3.1 |
| 2.0 m/s | ||||
| Position RMSE | 38.23 | 37.18 | 6.96 | 6.56 |
| Velocity RMSE, m/s | 0.56 | 0.51 | 0.18 | 0.13 |
| Detection delay, s | 34.5 | 33.8 | 1.1 | 0.5 |
| 5.0 m/s | ||||
| Position RMSE, m | 41.46 | 40.24 | 8.14 | 7.44 |
| Velocity RMSE, m/s | 0.71 | 0.66 | 0.37 | 0.27 |
| Detection delay, s | 29.3 | 27.8 | 0.5 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, P.; Li, H.; Wen, G.; Wang, Z. Application of Adaptive Weighted Strong Tracking Unscented Kalman Filter in Non-Cooperative Maneuvering Target Tracking. Aerospace 2022, 9, 468. https://doi.org/10.3390/aerospace9080468
Huang P, Li H, Wen G, Wang Z. Application of Adaptive Weighted Strong Tracking Unscented Kalman Filter in Non-Cooperative Maneuvering Target Tracking. Aerospace. 2022; 9(8):468. https://doi.org/10.3390/aerospace9080468
Chicago/Turabian StyleHuang, Pu, Hengnian Li, Guangwei Wen, and Zhaokui Wang. 2022. "Application of Adaptive Weighted Strong Tracking Unscented Kalman Filter in Non-Cooperative Maneuvering Target Tracking" Aerospace 9, no. 8: 468. https://doi.org/10.3390/aerospace9080468
APA StyleHuang, P., Li, H., Wen, G., & Wang, Z. (2022). Application of Adaptive Weighted Strong Tracking Unscented Kalman Filter in Non-Cooperative Maneuvering Target Tracking. Aerospace, 9(8), 468. https://doi.org/10.3390/aerospace9080468