Accelerometer and Magnetometer Joint Calibration and Axes Alignment



Abstract
1. Introduction
2. Accelerometer’s and Magnetometer’s Error Characteristics and Measurement Model
2.1. Common Accelerometer’s and Magnetometer’s Error Sources
- Bias or offset is a constant error exhibited by all inertial and magnetic sensors. In most cases, it is the dominant term in the overall error of the sensor.
- Scale-factor error is the deviation of the input–output gain from unity.
- Cross-coupling error is caused by the nonorthogonality of the sensor’s sensitivity axes due to manufacturing imperfections.
- Random noise is the nondeterministic error caused by both the mechanical and electronic structures of the sensors.
2.2. Accelerometer’s Measurement Model
2.3. Magnetometer’s Measurement Model
3. The Proposed Algorithm
3.1. Joint Accelerometer and Magnetometer Calibration
3.2. Accelerometer’s and Magnetometer’s Axes Alignment
3.3. Joint Accelerometer’s and Magnetometer’s Calibration with Simultaneous Axes Alignment
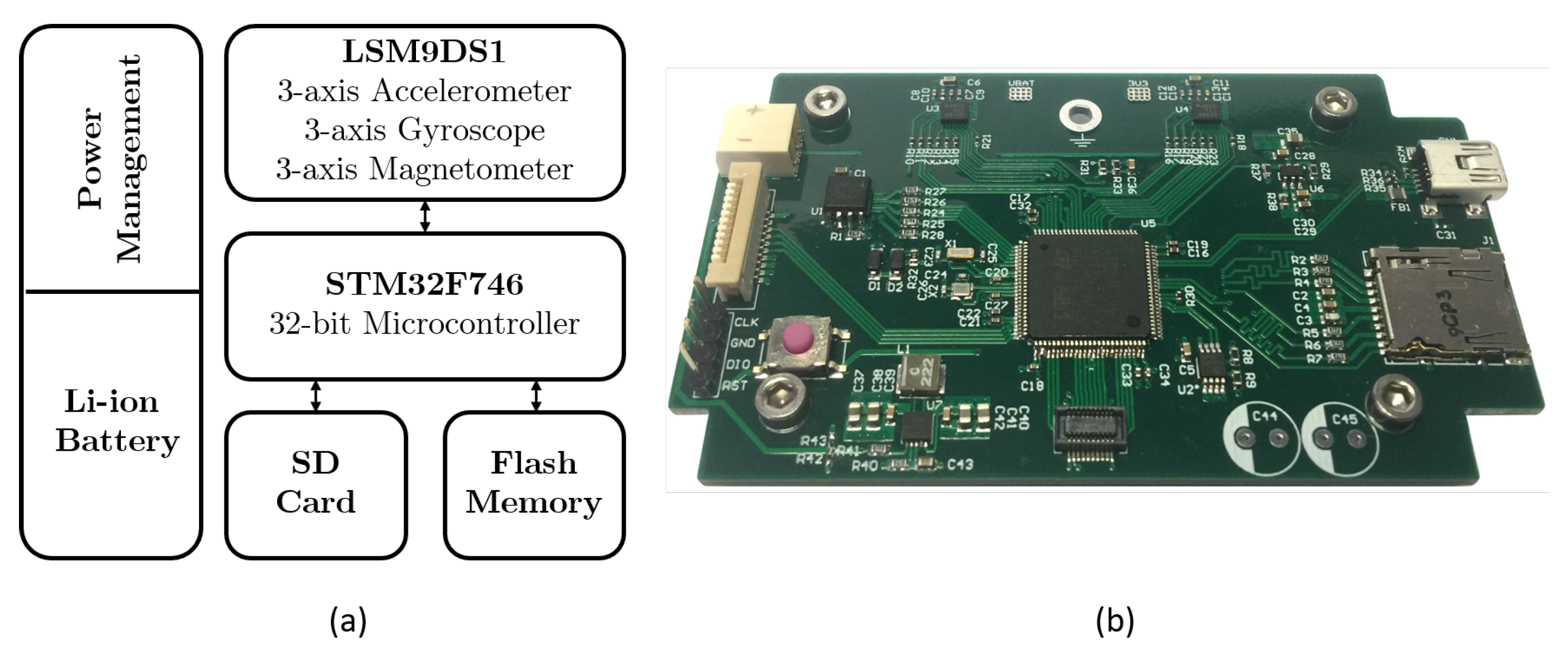
4. Measurement Platform
5. Experimental Results and Algorithm’s Performance
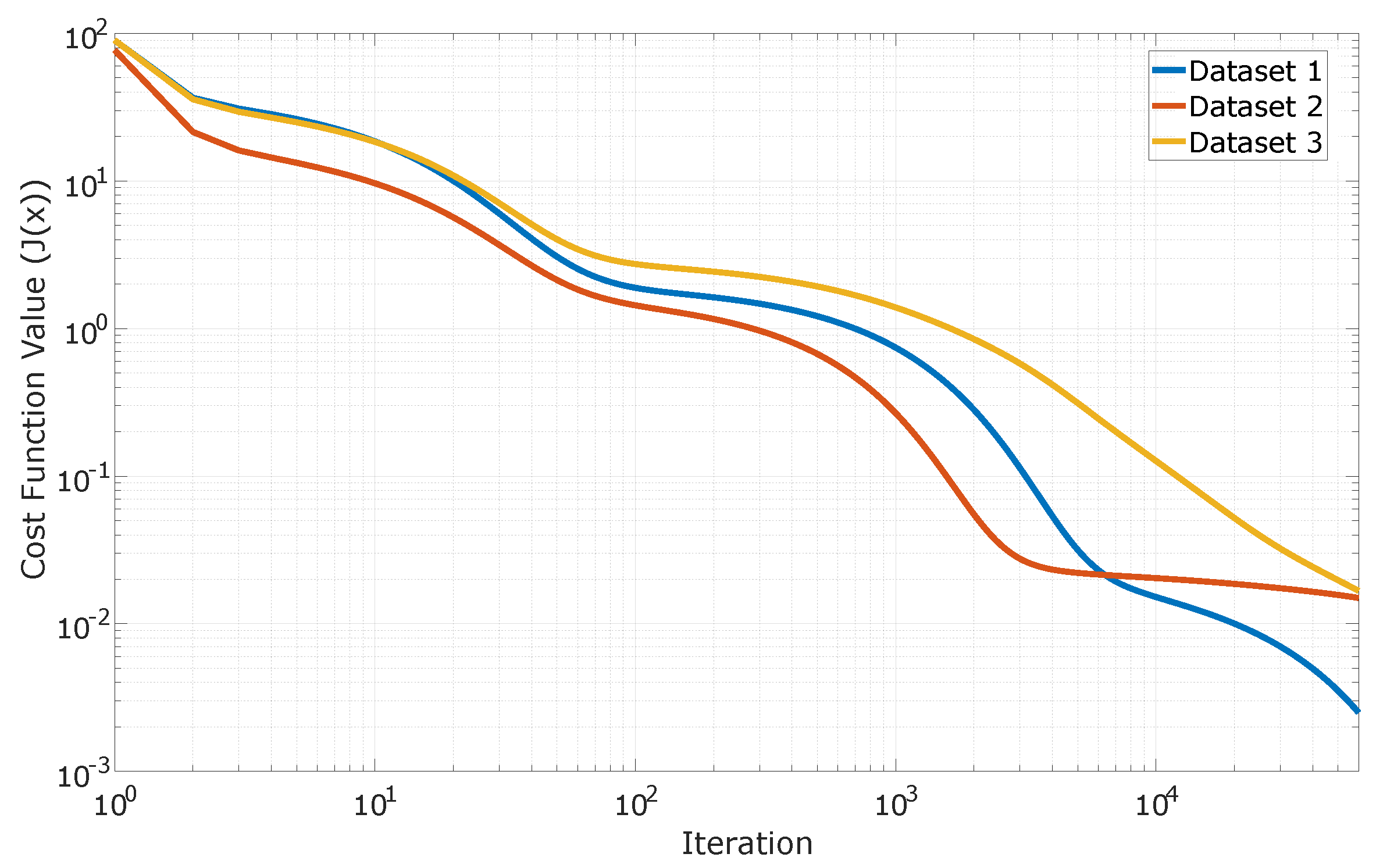
5.1. Algorithm’s Convergence
5.2. Calibration Parameters
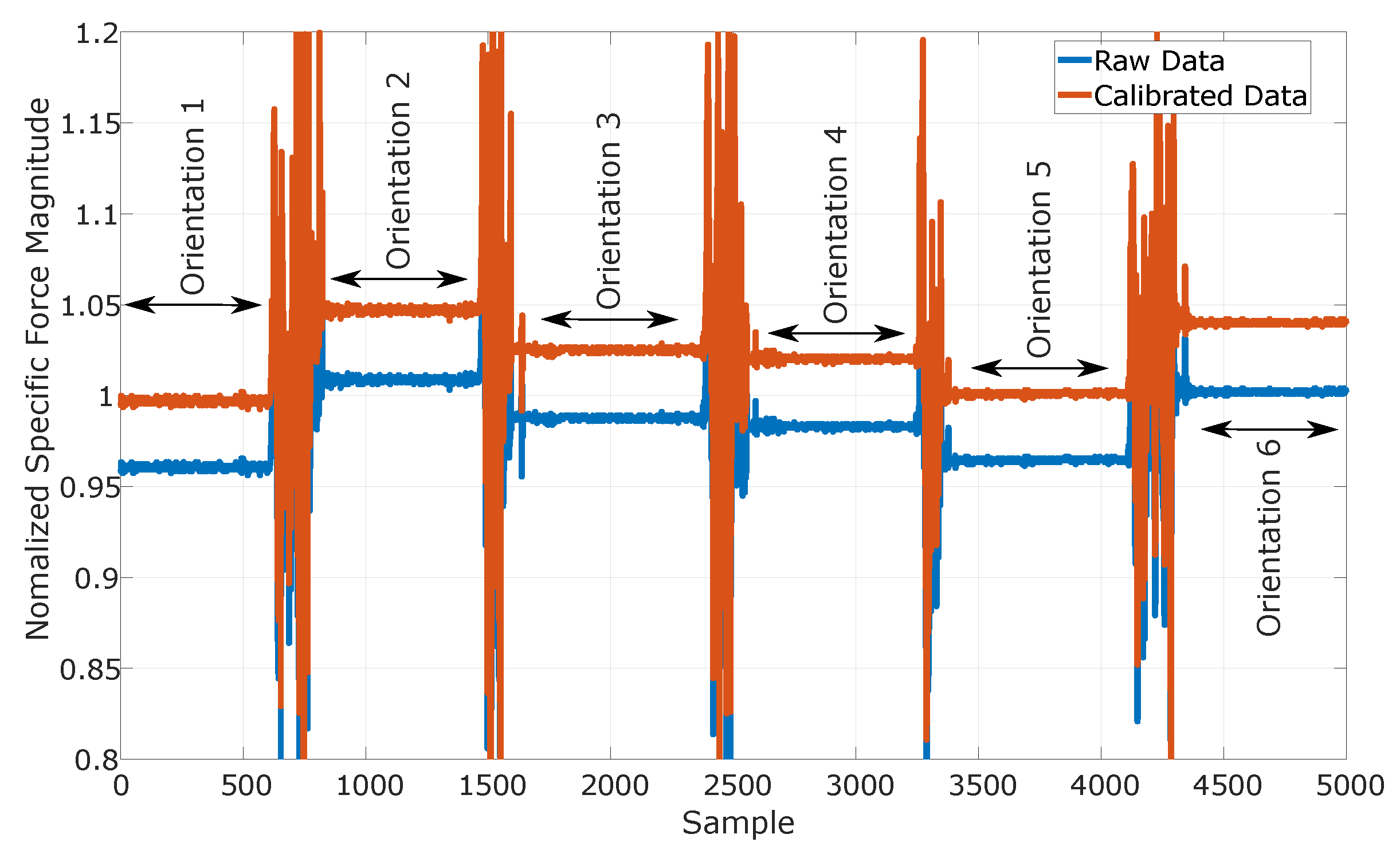
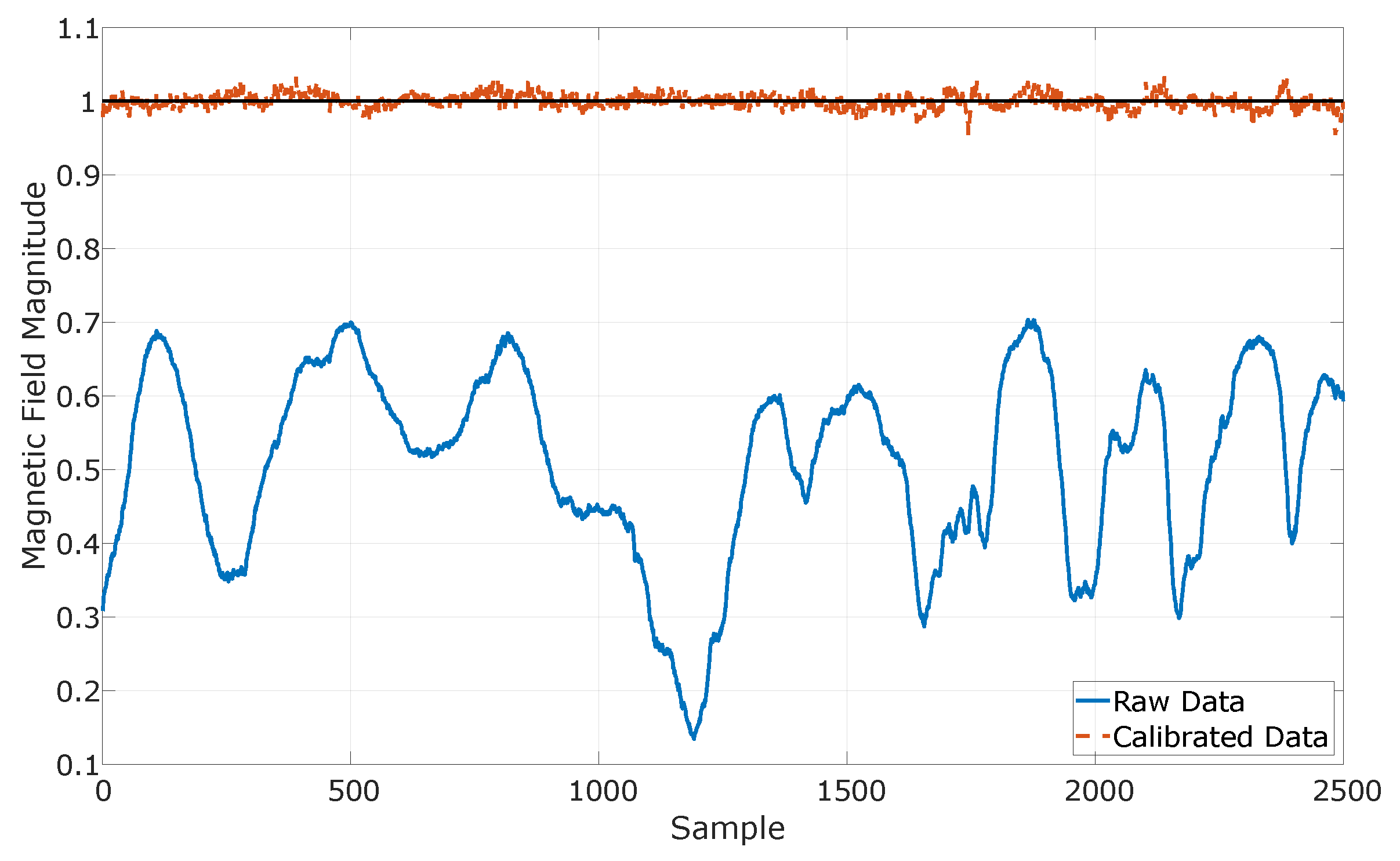
5.3. Calibration Accuracy
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fischer, C.; Talkad Sukumar, P.; Hazas, M. Tutorial: Implementing a Pedestrian Tracker Using Inertial Sensors. IEEE Pervasive Comput. 2012, 12, 17–27. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 27 June–1 July 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Chu, C. Video stabilization for stereoscopic 3D on 3D mobile devices. In Proceedings of the 2014 IEEE International Conference on Multimedia and Expo (ICME), Chengdu, China, 14–18 July 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. IEEE Aerosp. Electron. Syst. Mag. 2013, 30, 26–27. [Google Scholar]
- Lu, X.; Liu, Z.; He, J. Maximum Likelihood Approach for Low-Cost MEMS Triaxial Accelerometer Calibration. In Proceedings of the 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 10–11 September 2016; pp. 179–182. [Google Scholar] [CrossRef]
- Ammann, N.; Derksen, A.; Heck, C. A novel magnetometer-accelerometer calibration based on a least squares approach. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 577–585. [Google Scholar] [CrossRef]
- Frosio, I.; Pedersini, F.; Borghese, N.A. Autocalibration of MEMS Accelerometers. IEEE Trans. Instrum. Meas. 2008, 58, 2034–2041. [Google Scholar] [CrossRef]
- Papafotis, K.; Sotiriadis, P.P. MAG.I.C.AL.–A Unified Methodology for Magnetic and Inertial Sensors Calibration and Alignment. IEEE Sens. J. 2019, 19, 8241–8251. [Google Scholar] [CrossRef]
- Glueck, M.; Buhmann, A.; Manoli, Y. Autocalibration of MEMS accelerometers. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 1788–1793. [Google Scholar] [CrossRef]
- Alonso, R.; Shuster, M.D. TWOSTEP: A fast robust algorithm for attitude-independent magnetometer-bias determination. J. Astronaut. Sci. 2002, 50, 433–451. [Google Scholar]
- Wu, Y.; Shi, W. On Calibration of Three-Axis Magnetometer. IEEE Sens. J. 2015, 15, 6424–6431. [Google Scholar] [CrossRef]
- Kok, M.; Schön, T.B. Maximum likelihood calibration of a magnetometer using inertial sensors. IFAC Proc. Vol. 2014, 47, 92–97. [Google Scholar] [CrossRef]
- Kok, M.; Schon, T.B. Magnetometer Calibration Using Inertial Sensors. IEEE Sens. J. 2016, 16, 5679–5689. [Google Scholar] [CrossRef]
- Vasconcelos, J.F.; Elkaim, G.; Silvestre, C.; Oliveira, P.; Cardeira, B. Geometric Approach to Strapdown Magnetometer Calibration in Sensor Frame. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1293–1306. [Google Scholar] [CrossRef]
- Wu, Y.; Zou, D.; Liu, P.; Yu, W. Dynamic Magnetometer Calibration and Alignment to Inertial Sensors by Kalman Filtering. IEEE Trans. Control Syst. Technol. 2018, 26, 716–723. [Google Scholar] [CrossRef]
- Wu, Y.; Luo, S. On Misalignment Between Magnetometer and Inertial Sensors. IEEE Sens. J. 2016, 16, 6288–6297. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B.; Gustafsson, F.; Luinge, H. Calibration of a magnetometer in combination with inertial sensors. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 787–793. [Google Scholar]
- Gheorghe, M.V. Calibration for tilt-compensated electronic compasses with alignment between the magnetometer and accelerometer sensor reference frames. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-based Positioning and their Integration; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Metge, J.; Mégret, R.; Giremus, A.; Berthoumieu, Y.; Décamps, T. Calibration of an inertial-magnetic measurement unit without external equipment, in the presence of dynamic magnetic disturbances. Meas. Sci. Technol. 2014, 25, 125106. [Google Scholar] [CrossRef]
- Papafotis, K.; Sotiriadis, P.P. Computationally Efficient Calibration Algorithm for Three-Axis Accelerometer and Magnetometer. In Proceedings of the 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer | |
|---|---|
| Measurement Range | g– g |
| Output Resolution | 16 bits |
| Sensitivity | mg/LSB ( g ) |
| Output Data Rate (max) | 952 Hz |
| Magnetometer | |
|---|---|
| Measurement Range | Gauss– Gauss |
| Output Resolution | 16 bits |
| Sensitivity | mGauss/LSB ( Gauss ) |
| Output Data Rate (max) | 80 Hz |
| Dataset | Inclination Angle () |
|---|---|
| 1 | |
| 2 | |
| 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papafotis, K.; Sotiriadis, P.P. Accelerometer and Magnetometer Joint Calibration and Axes Alignment. Technologies 2020, 8, 11. https://doi.org/10.3390/technologies8010011
Papafotis K, Sotiriadis PP. Accelerometer and Magnetometer Joint Calibration and Axes Alignment. Technologies. 2020; 8(1):11. https://doi.org/10.3390/technologies8010011
Chicago/Turabian StylePapafotis, Konstantinos, and Paul P. Sotiriadis. 2020. "Accelerometer and Magnetometer Joint Calibration and Axes Alignment" Technologies 8, no. 1: 11. https://doi.org/10.3390/technologies8010011
APA StylePapafotis, K., & Sotiriadis, P. P. (2020). Accelerometer and Magnetometer Joint Calibration and Axes Alignment. Technologies, 8(1), 11. https://doi.org/10.3390/technologies8010011