1. Introduction
The current era of globalization and the high competition environment has set up a high demand for talent and intelligence requirements. The education quality represents the core elements of success in such competition. Mechatronics classified as a “unifying interdisciplinary and intelligent engineering science paradigm” [
1], due to its capability to comprehend and synergize technologies with modern engineering sciences that exhibit quality performance, stimulate creativity and innovations, focus on the interaction of interdisciplinary knowledge, and building up thinking skills through the learning process. Furthermore, it is highly considered as a philosophy and a new way of dynamic work/practices that support new ways of learning to lead to new concurrent design methodologies and innovations [
1,
2]. Many studies have been conducted to understand the mechatronics education process and its comprehensive role to establish quality educational requirements and fulfilling future needs creatively. Essential parts of mechatronics education demand to complement theoretical knowledge with practical skills and experience at different levels of the educational process. Such relation aims to develop skills finding creative and innovative solutions, hands-on experience, and practical knowledge, decision-making capabilities at individual and teamwork levels. Hence, among the key features of mechatronics skill-building learning and education is the integration of problem/project-based learning within its structural requirements.
Mechatronics evolved as an engineering science discipline [
3] that best reflects interdisciplinary concepts into practice, synergizing knowledge contributed by different disciplines in an innovative way. Mechatronics, with its effective educational process, is contributing to developing capable future creative engineers. Liliana and Florina [
4] address the synergy that can be achieved between education, knowledge, and innovation through mechatronics education and its impact on future needs. Acar and Parkin [
5] reviewed aspects of mechatronics education and training while comparing the effectiveness of generalist and specialist engineering education.
Researchers published work focused on developing technical tools and systems to enhance experience and skills through training. Akdogan et al. [
6] introduced a study tool for teaching and training with a focus on stepper motor as a driving system and its associated techniques using a microcontroller and suitable interface. Camposaragna et al. [
7] presented mechatronics educational activity at Bergamo University demonstrated using course projects aiming to teach mechatronics by designing Cartesian plotters. A mechatronics system was developed by Lee and Jung [
8] to support learning by using intelligent control techniques. To illustrate the mechatronics intelligent system, an inverted pendulum system was designed and implemented using a neuro-fuzzy control method, based on the Tagaki-Sugeno model. Stockmans-Daou [
9], a development system, was introduced, and it constitutes a framework along with automated tools that help to develop reconfigurable mechatronics platforms by combining LEGO Mindstorms systems with a focus on robotics education. Besides, Tokuyasu [
10] used Mindstorms platforms and introduced mechatronics installations that provide functional blocks with different capabilities, motors, and sensors. Mindstorms with their sensors are widely considered as an effective toolkit for mechatronics education. Stark et al. [
11] developed a low-cost personal laboratory setup supporting learning mechatronics control theory is featured by portability and accessibility. Furthermore, Yilmaz and Tuncalp [
12] introduced a mixed learning model that is Web-based and integrates a range of perceptual techniques and methods for effective mechatronics education.
Besides the mentioned work, Sell et al. [
13] introduced a methodology with its technical concept that helps students to use mechatronics platforms to support coursework and hands-on experiments through the Internet independent of physical place. The developed platform was demonstrated in Estonia and Germany, and the reflections of the experience were reported by Grover et al. [
14]. For the purpose of enhancing microcontroller skills, an undergraduate course was designed for students with different backgrounds. This course was based on a low-cost Arduino platform. Pratumsuwan [
15] presented a framework for the final year mechatronics project.
This paper aims to enhance education and learning quality and contributes to learning while stimulating creative and critical thinking skills. The paper has adopted a student-centered learning approach and focused on developing training tools that contribute to improve the hands-on experience and integrate it with project-based learning. This enables students to apply the acquired knowledge in the project to develop new ideas and thinking skills. For this purpose, four educational and experimental systems are proposed to stimulate the learning process of undergraduate students. The developed experimental systems, along with the adopted project-based learning approach, are evaluated in actual laboratory sessions supporting different courses at Sanyo-Onoda City University, Yamaguchi, Japan, and at the American University in Cairo.
2. Paper Contributions and Methodology
The key contributions of this paper can be listed as follow:
A review of the student-centered learning approach in developing mechatronics experiential learning to maximize student engagements (participation and investigation) and contributions by stimulating their thinking skills. In this regard, the focus of the paper is not the general standard aspect of experiential learning rather than the way it influences the learning process by having effective synergizing cognition with behavioral learning. This approach aligns the key elements contributing to the quality of learning by facilitating students’ inference and help to find out new situations and ways to solve new real-life problems with innovative solutions. This demand to listen carefully to students’ feedback and encourage them to have a share in the decision. These demands an understanding of what students’ value throughout the learning process;
The development of a set of experiments that integrate the necessary knowledge and skills need it in mechatronics as an interdisciplinary field. The developed experimental hardware and associated software alone are not making a major difference compared to the adopted learning process as a whole. Each experiment in the list of the laboratory work represents an integrated process that includes: Experiment set up and troubleshooting, running and results’ evaluation, answering attached design problems according to the design requirements. This is going to challenge the gained skills throughout the experiment while stimulating students to develop new skills. Furthermore, it leads to improving writing and oral communication skills;
The developed learning process, associated with a holistic assessment, and evaluation approach that looks to assess the overall performance of the student within each conducted learning activity. This also considers student involvement in a part of the assessment process;
A guideline for project-based learning that helps to conduct effective and efficient learning skills.
The adopted methodology that has been used to achieve this aims to:
Understand the role of experiential learning to build-up hands-on experience and stimulate thinking skills;
Develop a student-centered approach that engages students in the learning process at the laboratory experimental level and the project-based learning activities;
Develop the necessary laboratory experiments and the necessary mechatronics experimental systems that facilitate students’ interactive engagement and experience through open involvement. This aims to develop quality learning skills, and assess the performance of the students at this level;
Develop a guideline that facilitates an effective approach to develop an effective project-based learning process that is student-centered to yield quality in terms of innovations and to develop new ideas and solutions. Implement and assess the performance of the students;
Evaluate the developed approach and layout concluding remarks.
3. Experiential Learning and Thinking Skills
The trends guiding education for the 21st century are student-centered, experiential learning, technology-infused, and inquiry-based supported by compassion and empathy. Experiential learning is an active student-led learning process through direct engagement supported by experience, analysis, and reflections. It can also be described as an applied creativity, a learning approach that helps to identify the ability of skill and knowledge adaptation needs and applies the required changes to improve and maximize performance. Therefore, experiential learning combined with creative thinking represents the top important requirements featuring future careers.
Creativity is a collection of critical skills that facilitate divergently thinking and enables the brain to generate new concepts, new ideas, and new ways to solve problems. Creativity skill-building can be achieved through different efforts, such as readings, interactive discussion, brainstorming, exercises, experiments, team-based projects, etc. This helps students to assess real problems available in real life in new ways and enables them to find out the best solution, novel product design, and the way to adapt and adopt new technologies. Building creative thinking as a cognitive process enables innovative capabilities that enhance the learning process yielding innovation.
Engineering education supported by doing through experiments and project-based learning methodologies has direct contributions to motivate students’ interest, improve their hands-on experience, and positively influence their learning capabilities. Moreover, it facilitates discussion and social interaction, encourage, inspire, and challenge students to improve their ability to apply the acquired knowledge. This approach enables students to use the added value knowledge to develop new skills to design and provide innovative solutions to problems in the real world. Such engagement supported by students’ active efforts helps them to build up experience by doing and learning from it, leading to stimulate the brain, enhance thinking skills, and establish creative abilities to develop innovative solutions. In addition, a team-based project helps to create and enhance employability skills at the individual and group levels. Such an approach forms the foundation of experiential learning that aims to conduct hands-on experiments and projects, test and troubleshoots, gather and analyze data, evaluate outcomes, reflect/observe creative behaviors abstracted from the learning novel experience. The creative behaviors stimulate new ideas and solutions that contribute to the enhancement of the learning process and in developing new thinking skills. Furthermore, this has a direct impact on developing professional skills and contribute to achieving the quality of innovative learning, enabling the transformation of new concepts into reality with added value processes, functions, services, or products [
16,
17,
18,
19,
20,
21,
22,
23].
4. Mechatronics and the Development of Creative Thinking Skills
As an interdisciplinary field, mechatronics is evolved into a philosophy supporting new ways of thinking, interdisciplinary knowledge synergy, work and practices, skills, and innovations [
2]. Mechatronics considers education as a social process with a focus to synergize knowledge, establish interactive communications, develop functional skills (through experiments and projects), stimulate motivation, facilitate new teaching techniques, and effectively contribute to the enhancement of student’s independent learning skills with the stimulation of strongly couples critical and creative activities as individuals and in teams to bring complementary dimensions to the learning process. This should be supported by an effective exploratory learning environment that focuses on creativity while stimulating a student’s motivation. In mechatronics education, the learning process is directly linked with functional skill development that is directly coupled with thinking and creativity. These skills enable thinkers to solve complex problems and work efficiently across different disciplines. In general, current human thinking is not that efficient, based on judgment more than ideas, design, knowledge, and experience. Thinking and creativity are skills that can be developed. These skills require learning it, practicing it, paying attention to it, and gaining confidence. Creative design is a constructive process that looks to develop and implement ideas with new values. Hence, it is essential that students and researchers (individuals and teams) develop their knowledge, experience, and accumulate the acquired creative thinking skills. Besides, engaging them to develop new innovative concurrent design capabilities.
Creative mechatronics as a concurrent and interactive design process helps to facilitate the learning process that leads to the generation of new ideas and solutions to fulfill the demand to maximize the level of creativity supported by creative thinking skills. Evidence of lateral thinking (horizontal) that is classified as deliberate creative skills aiming to understand existing challenges or opportunities, open new possibilities, maximize problem-solving agility for better or new solutions, and develop new ideas by trying to brainstorm new novel solutions, concepts, and perceptions, while understanding governing rules and constraints. In addition, evidence of vertical thinking involves logical thinking and reasoning, and it includes different functional principles in terms of accuracy, reliability, and geometric structure besides the application of general scientific design principles. In real problem-solving circumstances, a combination of lateral and vertical approaches should be considered to produce the best results. Moreover, practical design with experimental work is an integral part to stimulate thinking, while building up thinking skills. Integrating problem-solving approaches together with creative thinking practices into the concurrent design process of engineering and science projects/products demand not only to change the learning environment and the teaching methods, but it also requires to adopt a new holistic assessment, and evaluation methods [
24,
25]. Such learning environments contribute to establishing motivation, create curiosity and challenges, imagination, and success in understanding science, engineering, and technology [
2].
5. Mechatronics Experimental Educational Systems
A set of experimental systems were developed in association with this paper. The developed experimental system is featured by the integration of the necessary knowledge and skills demanded in mechatronics as an interdisciplinary field. The developed experimental hardware and associated software alone are not making a major difference compared to the adopted educational learning process as a whole. Each experiment in the list of the laboratory work represents an integrated process that includes: Experiment set up and troubleshooting, running and results’ evaluation, answering attached design problems according to the design requirements. This is going to challenge the gained skills throughout the experiment while stimulating students to develop new skills. Furthermore, it leads to improving writing and oral communication skills through the assigned presentation sessions.
5.1. Mechatronics Experimental System I
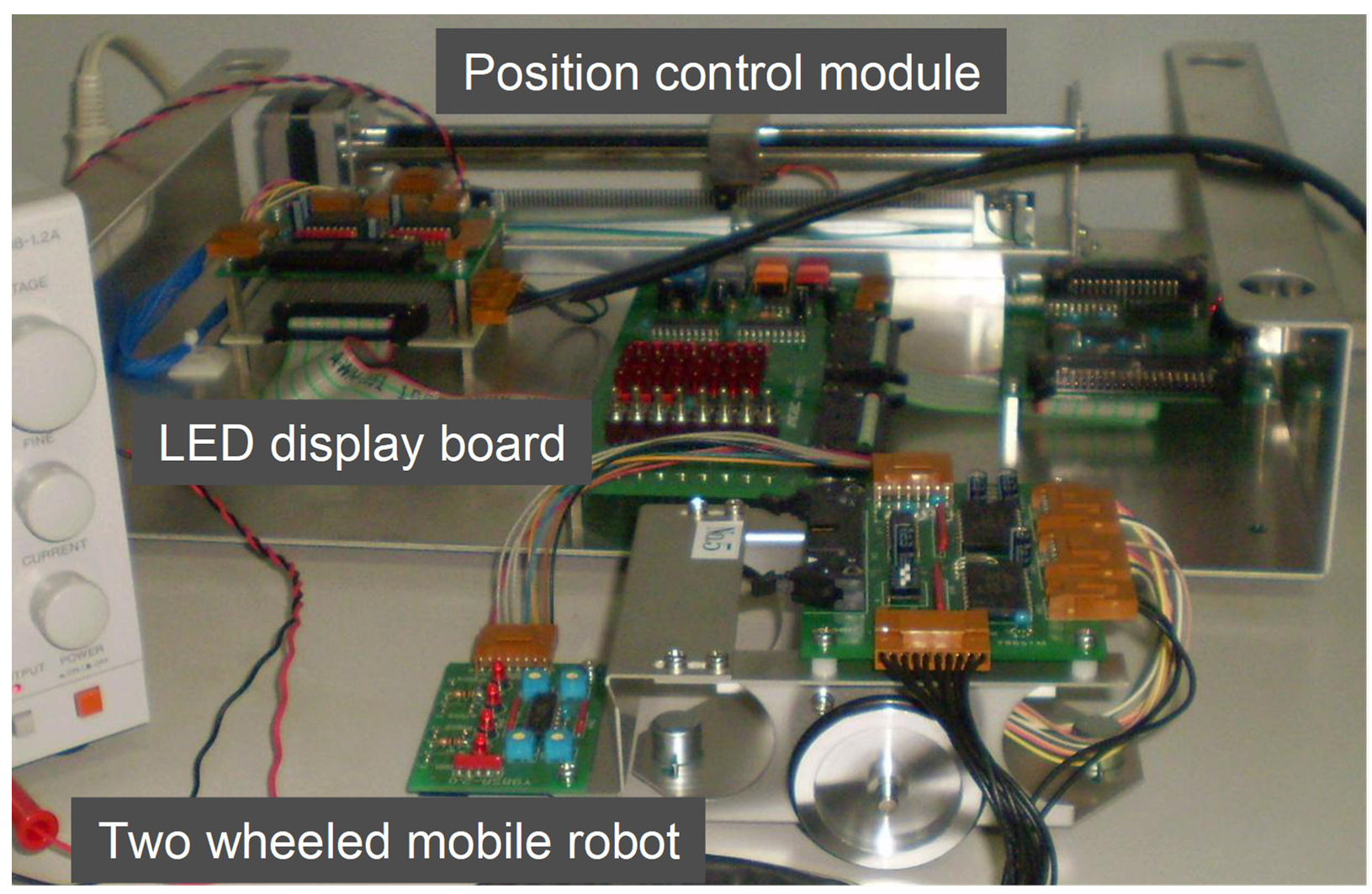
Figure 1 depicts the mechatronics experimental system I that consists of LEDs aboard showing LEDs as ON or OFF, a two wheels’ mobile robot with position control. The developed mechatronics experimental system I aims to support hands-on experiments as a part of experimental sessions of the course “Experiments I for Mechanical Engineering” required for second-year students [
18]. This course is a three credit-hour course, and it constitutes sixteen laboratory sessions divided into five modules associated with five topics. These are:
Each module constitutes three laboratory sessions. There are about 10 students per each laboratory session, which is divided into five groups. In general, two students per one group. The remaining laboratory session is dedicated to the group presentation on a selected module and for each group. The laboratory sessions are conducted weekly, and the duration of each is five hours. Accordingly, the laboratory module titled mechatronics experiment I is covered by three laboratory sessions, and that requires a total of 15 h (3 sessions × 5 h).
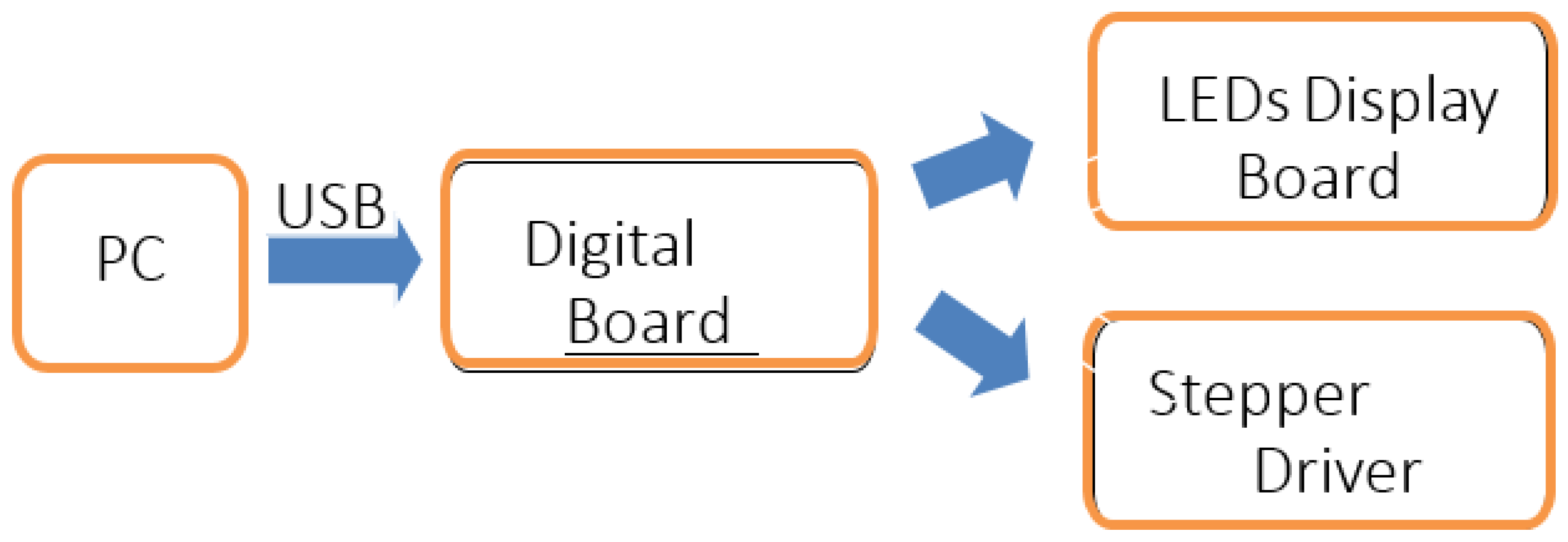
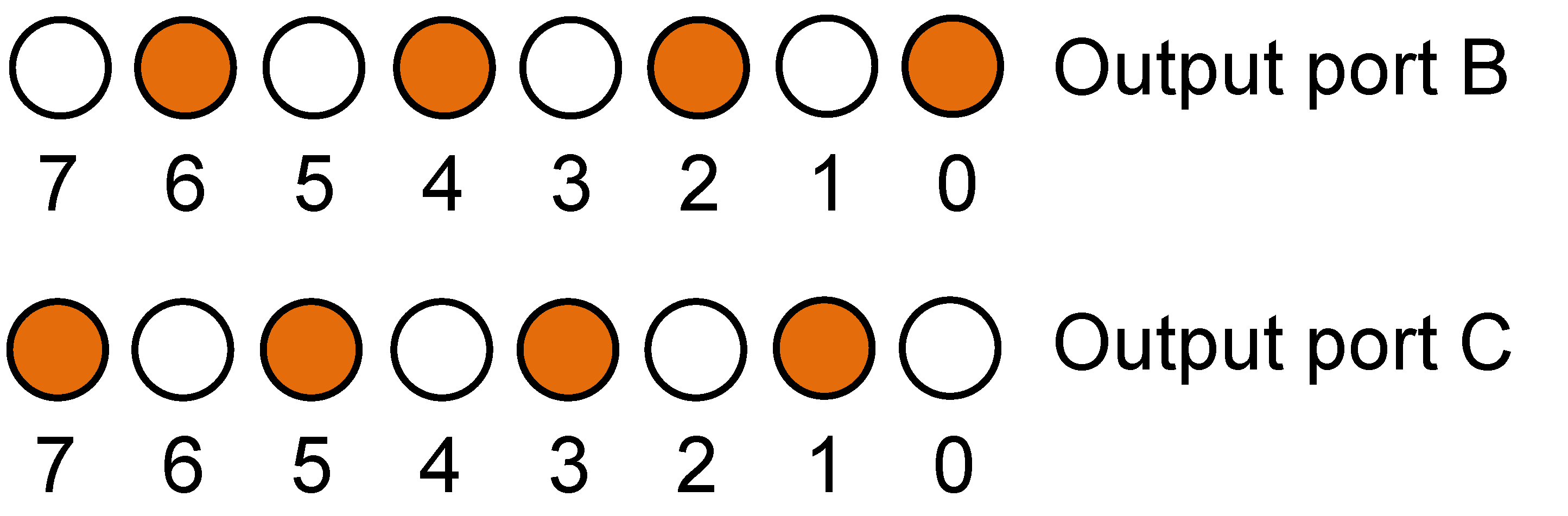
Figure 2 presents the board layout of the experimental LEDs. The board has 24 LEDs that arrayed into 8 LEDs per row, as depicted in
Figure 3, showing the two output ports B and C, respectively. Lighting and timely flashing patterns can be set using hexadecimal code as required, while the flashing period can be adjusted using Window’s timer interrupt or by external triggering. The experiment helps students to learn how to use input-output ports and to design LEDs’ flashing using varieties of different flashing patterns by writing proper computer programs to achieve the desired flashing according to the status of binary input received through sensors or by other means and checked through the input port. Five hours are allotted for this experiment covering hardware and programming skill requirements. Note that the input port A is used to receive the operational state of binary sensors.
5.1.1. Experiment on Position Control of a Stepper Motor
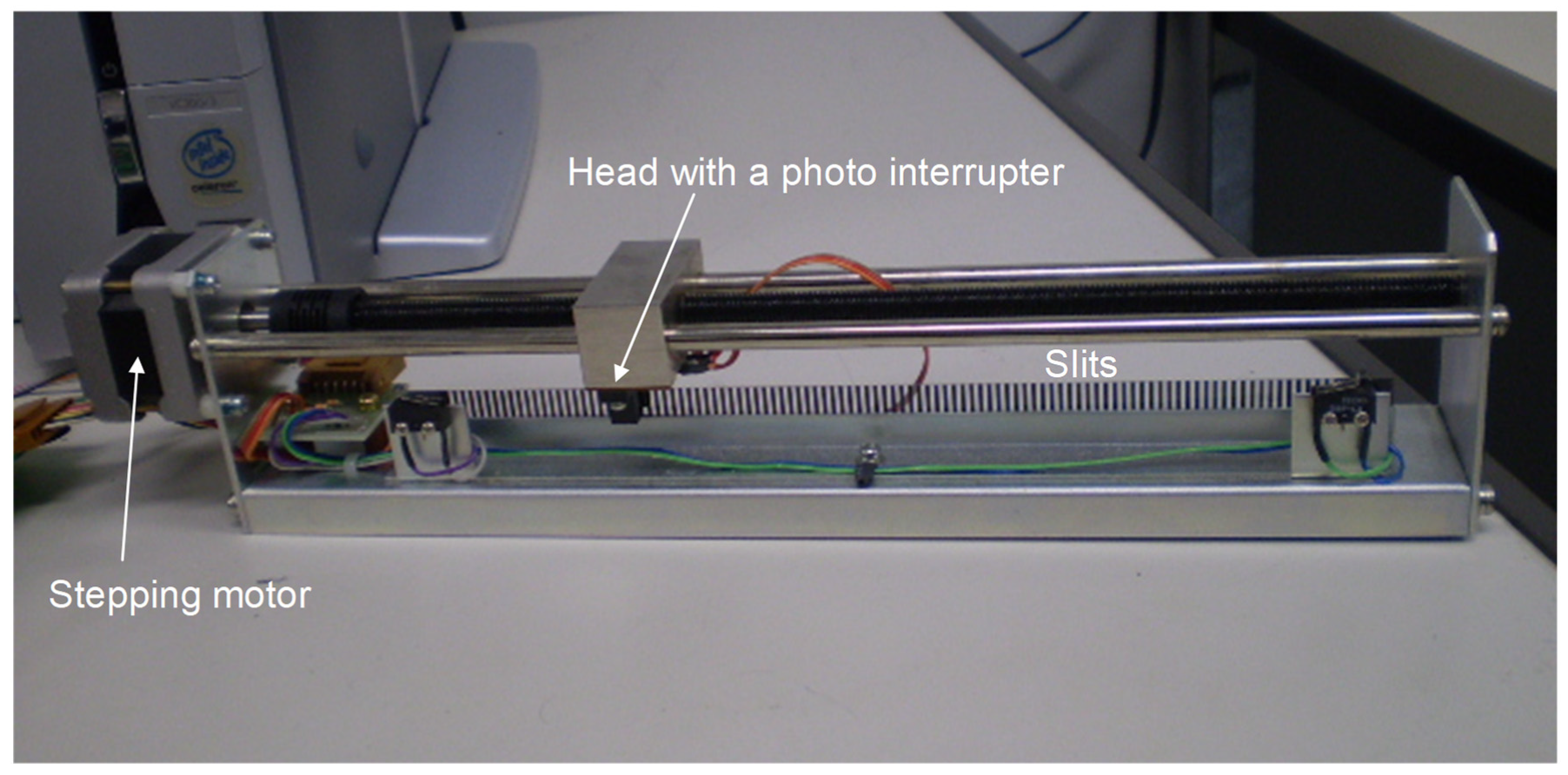
The position control module to control a stepper motor is shown in
Figure 4. A photo-interrupter is used and fixed together with the leadscrew that is mechanically coupled with the stepper motor. The sensor detects the position of the leadscrew movement through slit positions aligned under the base frame of the leadscrew. The pulse signals generated by the sensor during the movement are used to calculate the actual moved distance and compare it with the pulses sent to drive the stepping motor in steps equivalent to the total desired distance. This experiment helps students to program the motion and understand the effect of stepper motor resolution and the leadscrew resolution with their impact on the traveled distance and the position accuracy. With the implemented position control module and the leadscrew mechanism, each step of the used stepper motor has a resolution of 1.8 degrees/step, and this causes the leadscrew to move by 6.25 µm, based on its thread structure. The desired number of pulses signal representing the desired distance is sent to the motor through port A, and the output port B is used to monitor the actual movement using the photo-coupler (output port B, see
Figure 3).
Table 1 shows the interpretation of the binary code displayed at port B to that corresponding motor motion action. Students can learn from the experiment how to generate pulses used to drive the motor, how to control the stepper motor, and track the current position of the moving leadscrew. Besides, students (after understanding the hardware structure) work to develop computer programs to control the leadscrew while counting the number of detected slits and find out the position accordingly. Five hours are allotted to conduct this experiment.
5.1.2. Use of Mobile Robot for Line-Tracing Experiment
Figure 5 shows the used mobile robot with two actuated wheels and equipped with four diffuse light sensors at the front side. The two wheels of the robot are driven by two stepper motors. The motion of the stepper motors is excited by the binary data coming from received through the output ports B and C to energize the coils of the motors. Furthermore,
Figure 5 shows ω and v representing the rotational and the forward translational velocities of the robot, respectively. The robot’s rotational velocity is calculated from the angular velocity of both wheels as:
where
ω1 and
ω2 are the wheels’ rotational velocities 1 and 2, respectively, and the mobile robot is described with respect to its coordinate frame; 2
L represents the thread distance connecting the centers of the two wheels, while
R represents the wheel radius. Furthermore, when generating forward/backward linear motions, it requires only to set the required robot linear velocity (
v) and find out the linear velocity of each wheel,
v1,
v2, as,
The integrated light reflectors with the robot are used to detect floor color (black or white). The detection status is monitored by checking reflected outputs going to the input port A.
In this part of the experiment, the aim is to enable students to learn how to write basic programs that generate forward/backward motions and instruct the robot to turn left/right while understanding the basic kinematics of a two wheels’ mobile robots. In this experiment, students learn how to program the robot to generate the required motion, test and run the programs. Moreover, to write programs that enable the robot to trace a line using the integrated light sensors. Five hours are allotted to this experiment.
5.2. Mechatronics Experimental System II
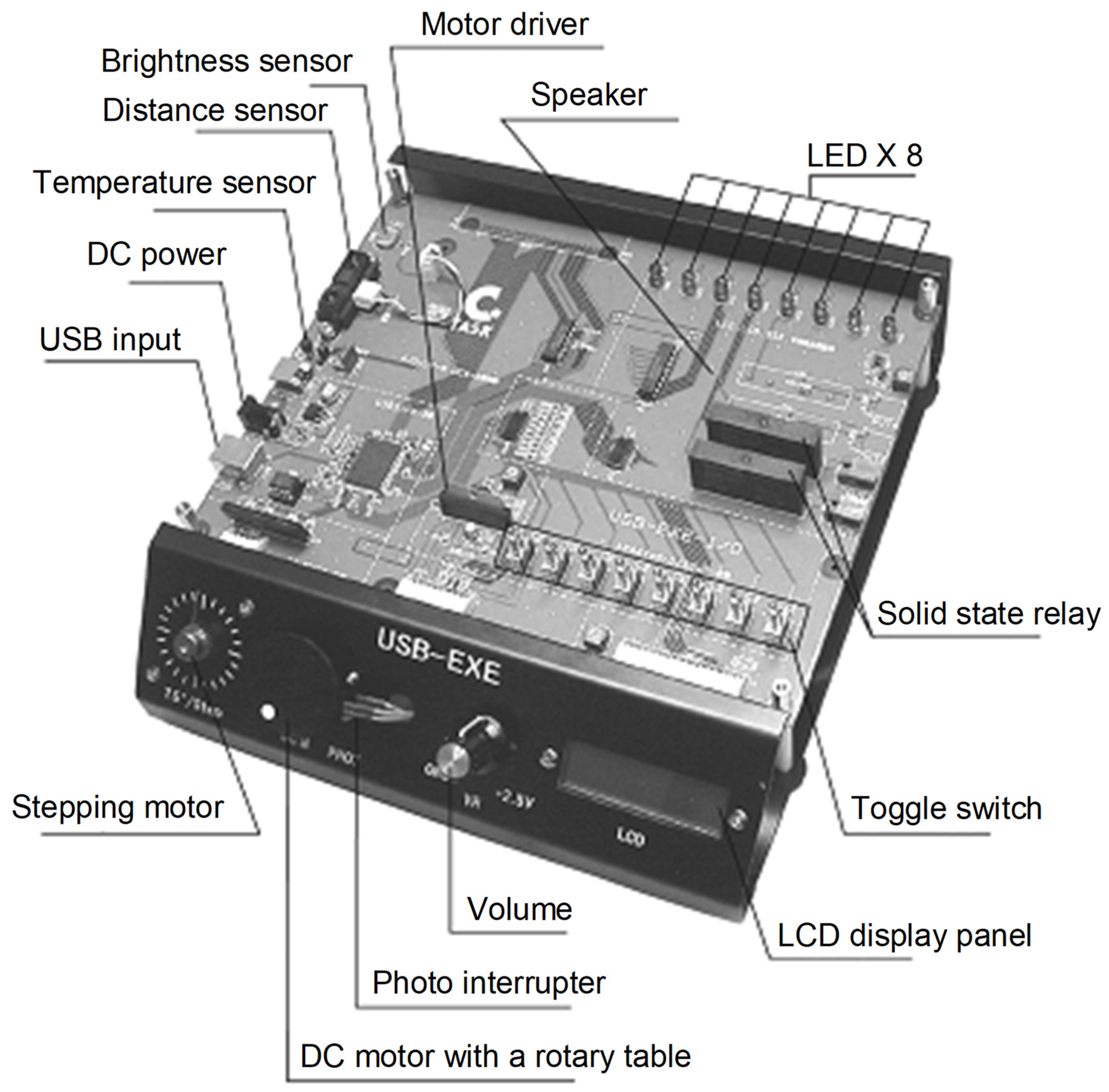
The second developed mechatronics experimental system is shown in
Figure 6, and it consists of three analog sensors that help to measure distance, temperature, and light intensity. Moreover, it has interfaces for AD/DA conversion; also, it is equipped with an LCD panel. Beside this, it has one DC motor and one stepper motor, and a photo-interrupter sensor. The principle hardware is of this experiment is provided through C-TASK Company. The developed experimental module “mechatronics experiment II” system is used to fulfill the needs demanded by the experimental sessions of the course “Experiments II for Mechanical Engineering” offered at a third year level [
26]. The Experiments II for Mechanical Engineering course is a four credit-hour course, and it is conducted for two semesters (one year). It constitutes twenty-six laboratory sessions (13 per each semester). The laboratory sessions are conducted weekly, and the duration of each laboratory session is five hours.
The laboratory sessions cover twelve modules supporting twelve topics. Two laboratory sessions are assigned for each module topic. Besides, a laboratory session is assigned for presentation at the end of each semester. The overall topic modules within the course are listed, based on each semester as follows:
For the first semester:
Thermal expansion of metallic materials,
Line trace robot using mind-storms,
Laminar and turbulent flow,
Control simulation,
Metallic materials and heat treatment, and
Boiling experiment and its visualization.
For the second semester:
Mechatronics experimental system II
Vibration simulation,
Articulated industrial robot,
Metallic materials and tension test,
Inverted pendulum, and
Heat cycle and heat exchange.
The first module during the week of mechatronics experimental system II aims to help students learn how to use different analog sensors and convert their output signals to digital through the use of A/D conversion technique. Students in the second week learn how to design a closed-loop feedback control facilitated by a PID control law to control the wheel’s rotational velocity. Velocity control software is developed and tested by students for the purpose of this experiment. In addition, the D/A converter used in this experiment is characterized by 8 bits output, and it can accommodate analog signal ranging at least from 0 to +3.3 V. Furthermore, it is necessary to practice how to adjust the output voltage from the D/A to match the need to drive the DC motor with 256 levels (8 bits) of speed control resolution. The DC motor velocity is controlled using a proportional-integral (PI) controller given by:
where
τ (
k) represents the DC motor torque’s output at the k discrete time;
Kp represents the proportional gain, and
Ki represents the integral gain of the PI controller;
and
are the desired rotational velocity and the actual rotational velocity measured at
k discrete time, as shown in
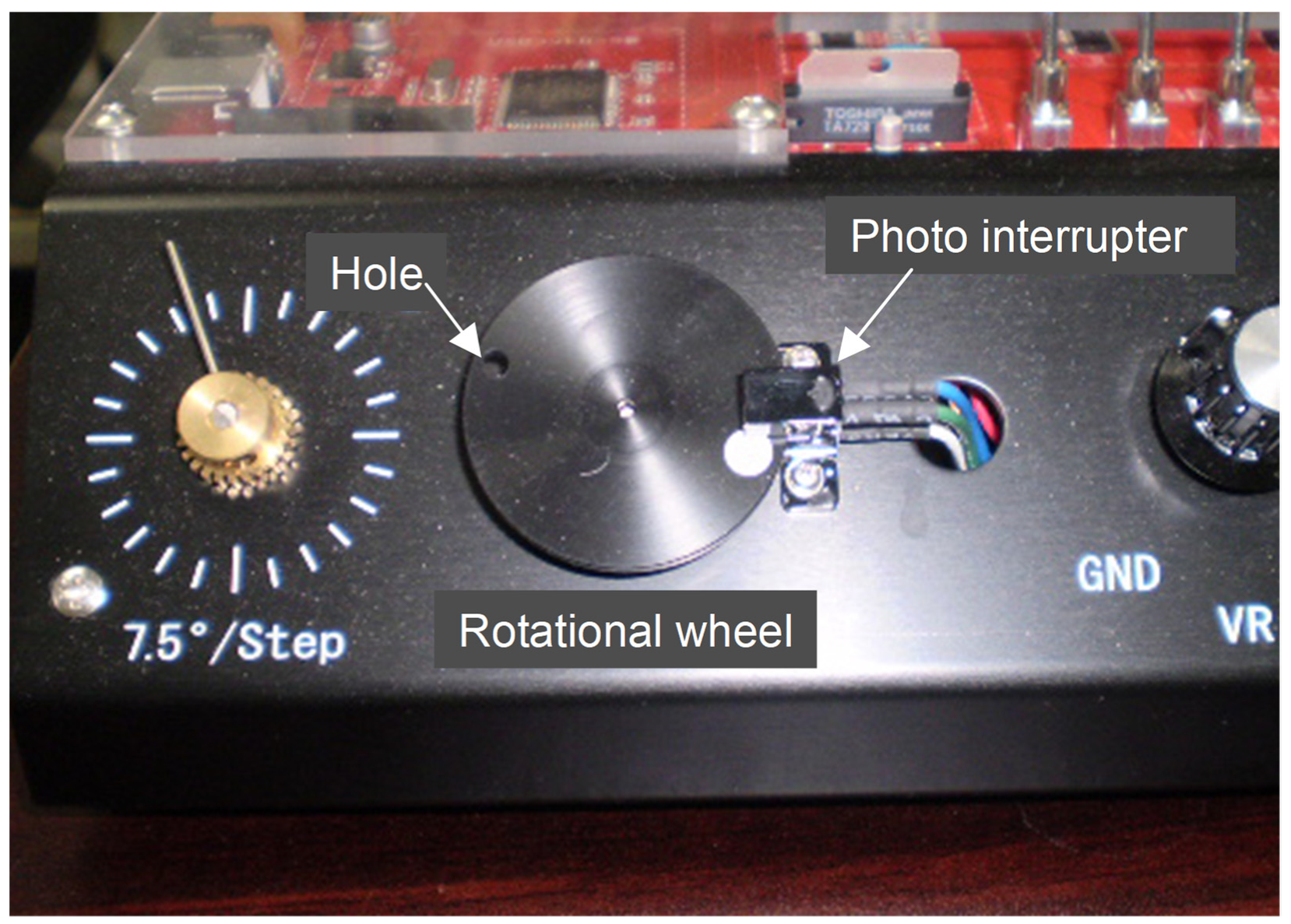
Figure 7. The actual rotational velocity is measured by counting the number of detected holes at the wheel boundary using the optical sensor.
This experiment enables students to design and implement velocity feedback controller described by Equations (3) and (4), respectively. Besides, students experimentally learn to use and understand the characteristics of PI controllers and their control impact on both dynamic parameters and the steady-state error.
5.3. Mechatronics Experimental System III
Grasping Force and Joint Velocity Control Using 4-DoF Robot
After going through the laboratory sessions of mechatronics experiment systems I and II, students would be able to reflect and build up their creative thinking skills through project-based learning with each course or dedicated for the fourth year senior project course as a requirement for their graduation. The robot’s arm is a PC-based 4-DOF, robot and each joint is driven by a DC motor. An example of used robots is called Arm Robot (ABOT), and it is shown in
Figure 8. The students used this robot to understand and demonstrate its operation and then learn how to develop a controller to control its joint velocities using Pulse Width Modulation (PWM) technique. In addition, the project aims to enable students to understand the principles of grasping force control using a force sensor placed at the inner sides of the gripper and demonstrate experimentally by programing the robot for this purpose. The experimental layout of the robot is also shown in
Figure 8. When the applied force by the gripper force increases, the resistance is representing the physical property of the sensor decreases. Hence, the robot’s controller can be programmed to monitor the change in the force by measuring the voltage across the force sensor. The measured voltage is conditioned and converted to digital through the AGB65-ADC converter module.
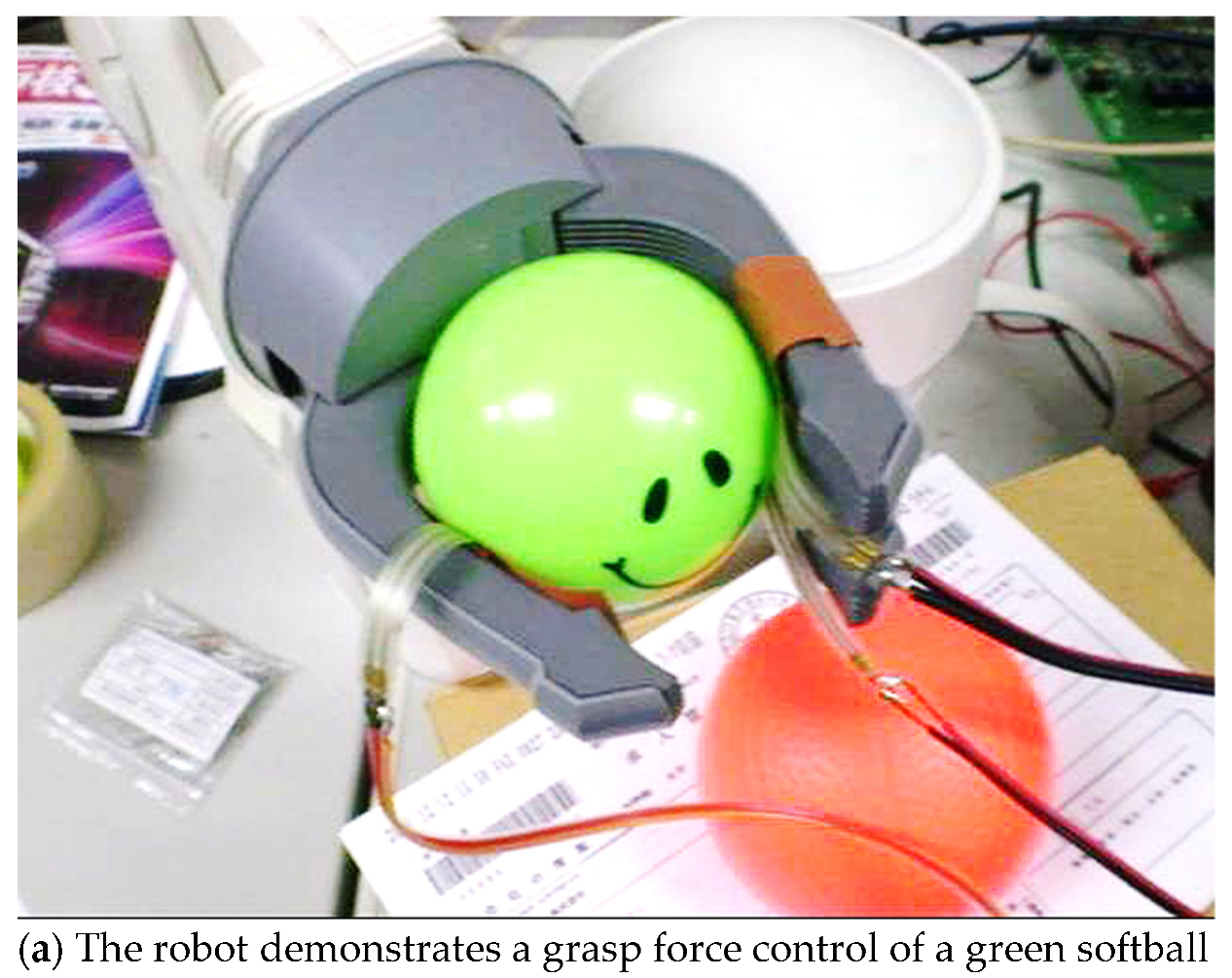
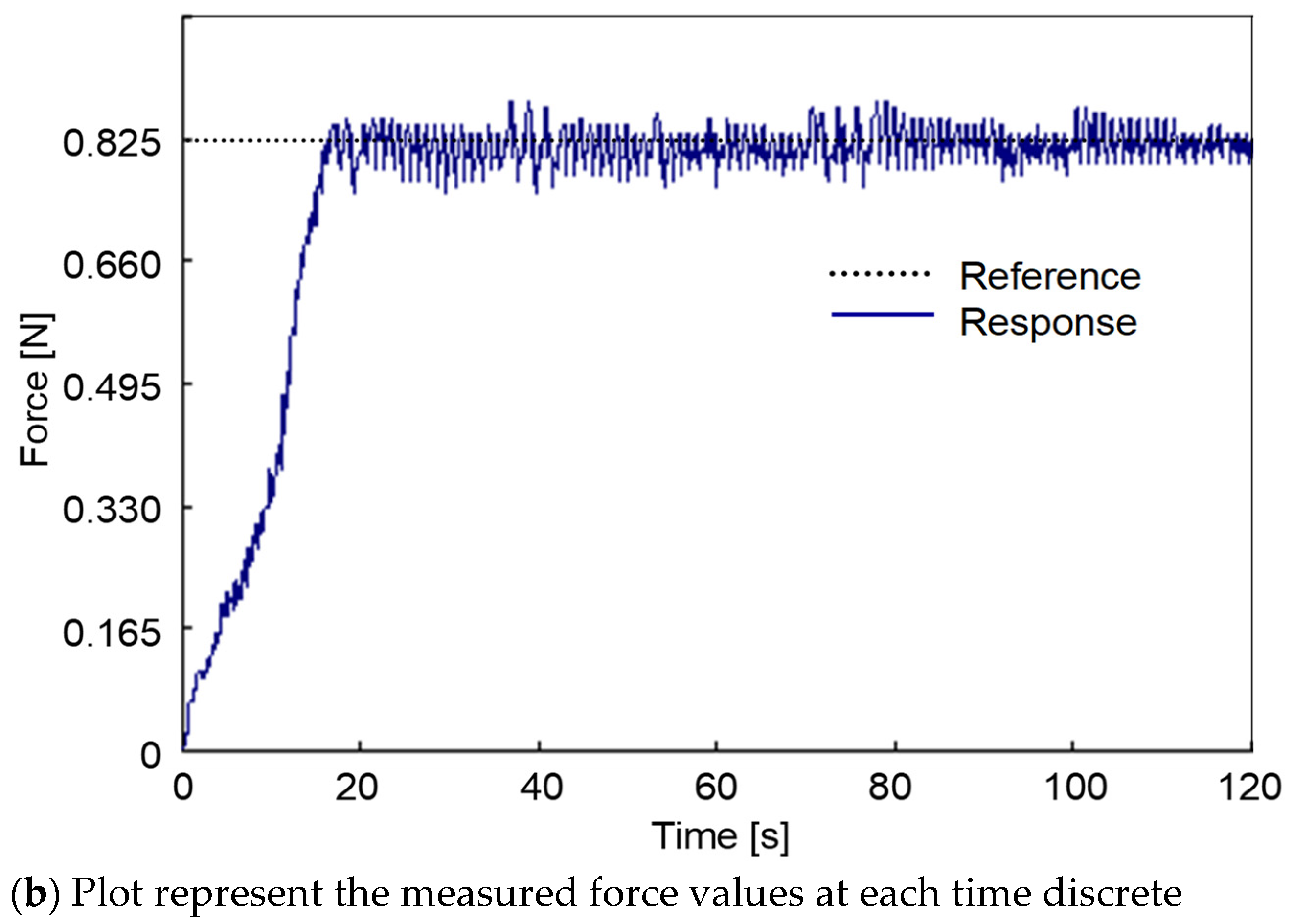
Figure 9a demonstrates the robots’ grasp force control of a green softball. The force control is achieved by controlling either the gripper’s opening or closing velocity according to the measured output of the force sensor. Furthermore,
Figure 9b demonstrates the desired and actual force control result. The measured force values at each time discrete are plotted to represent the feedback of the grasping motion.
5.4. Mechatronics Experimental System IV
Multiple Mobile Robots System
This section introduces the mechatronics experimental system IV. System IV uses a number of mobile robots to enable these robots to learn the principles of subsumption control architecture and the way to use it to develop schooling behavior. The subsumption control architecture represents the early contributions to developing behavior-based control introduced by Brooks in 1986 [
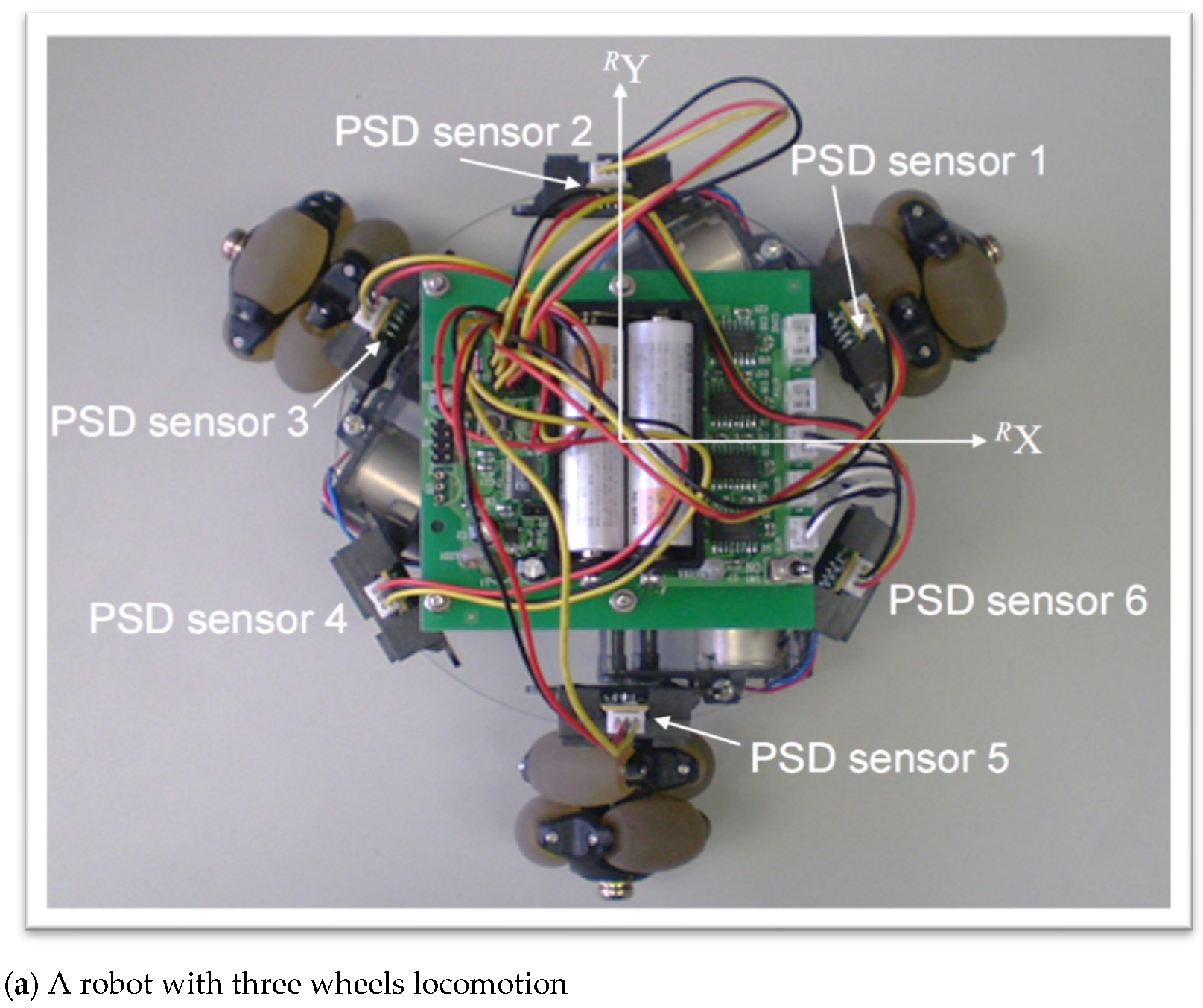
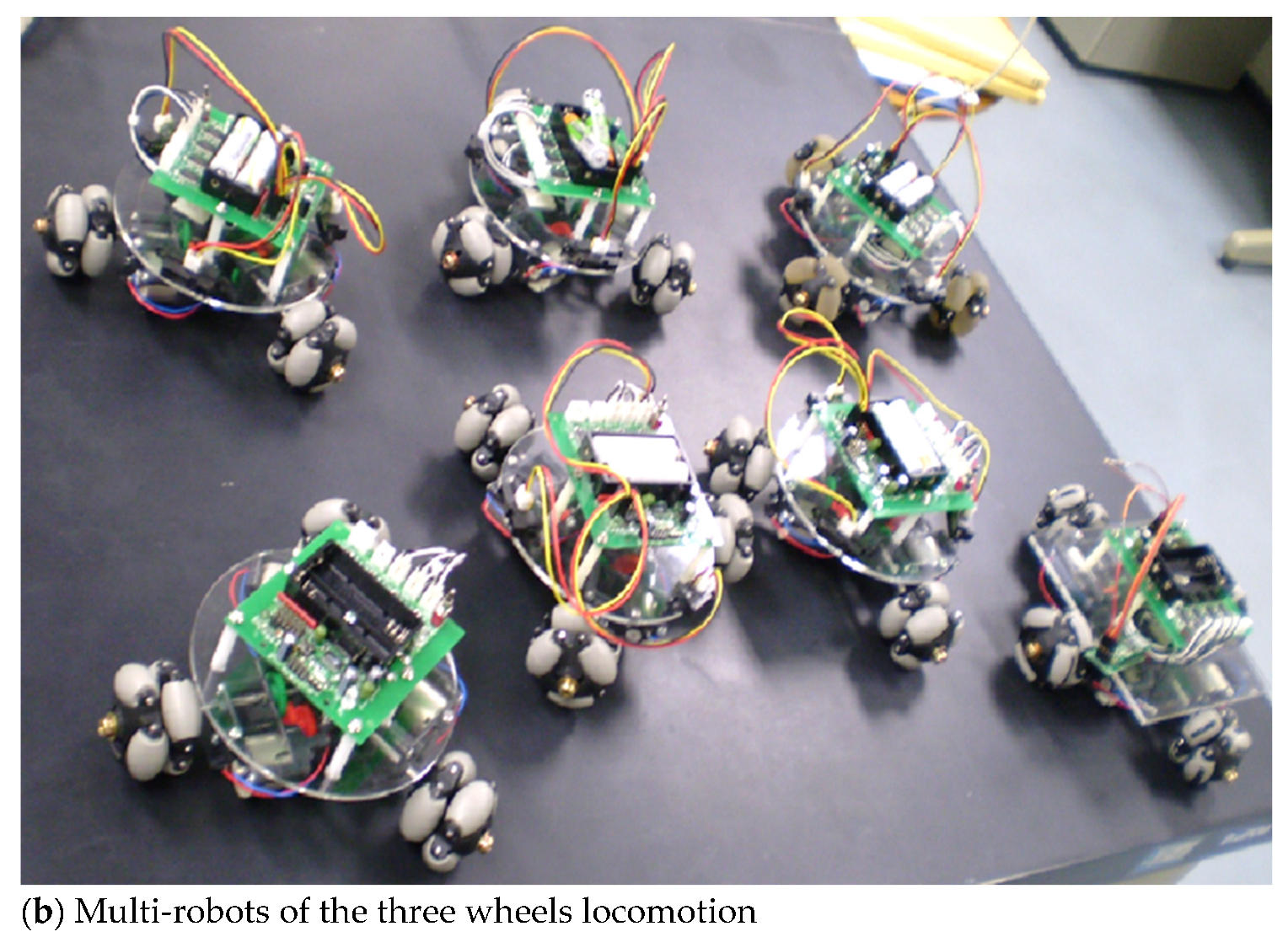
27], and it highly influences the navigation aspect of autonomous robotics development. A robot with three wheels locomotion is shown in
Figure 10a, and the is a multi-robotic system using the three wheels robot is shown in
Figure 10b. This system is used for the fourth year senior project to enhance their learning of new critical thinking skills through project-based learning, e.g., to develop a new structure of subsumption solving schooling behavior. With such learning activity, students begin to familiarize themselves, and practice the subsumption architecture concept and introduce technical methods to develop the structure of reactive behavior systems. This starts from low level behavior to a higher level behavior using layered sets of rules that compose reactive behaviors with reference to the demand of the environmental changes and needs.
Table 2 shows the list of command codes and the associated reaction behaviors (reflex actions) that support the navigation of the mobile robots. An agent represents a primitive basic behavior with an assigned priority. Each agent is designed to generate a reflex action based on the sensory information within its priority level.
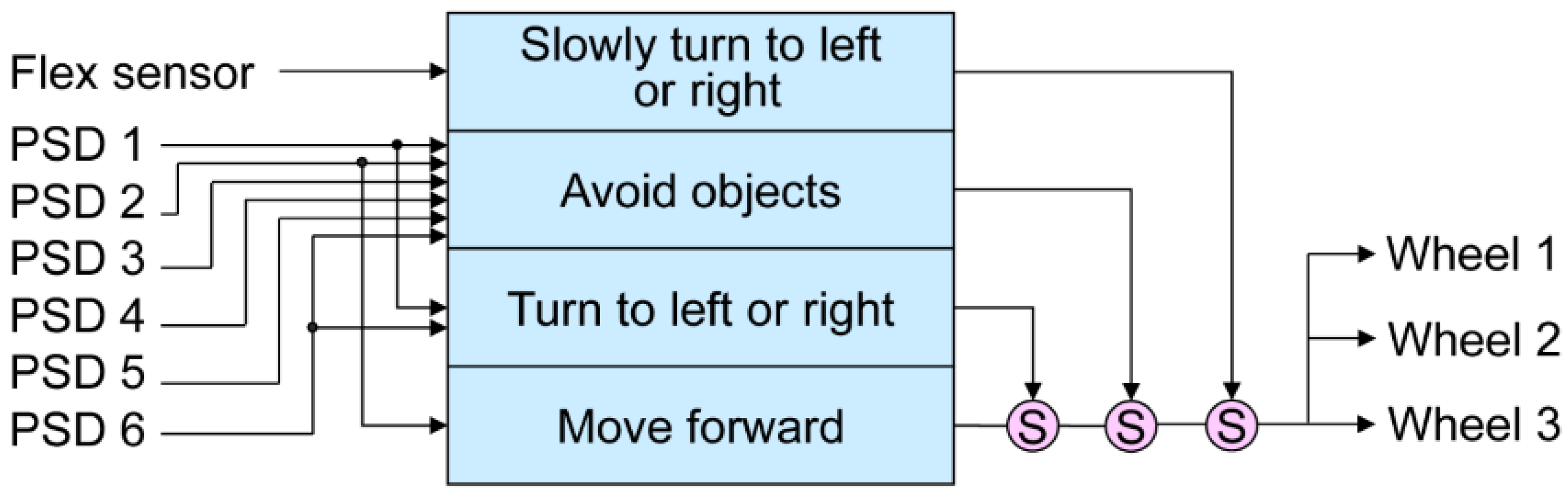
The developed subsumption-based controller is illustrated in
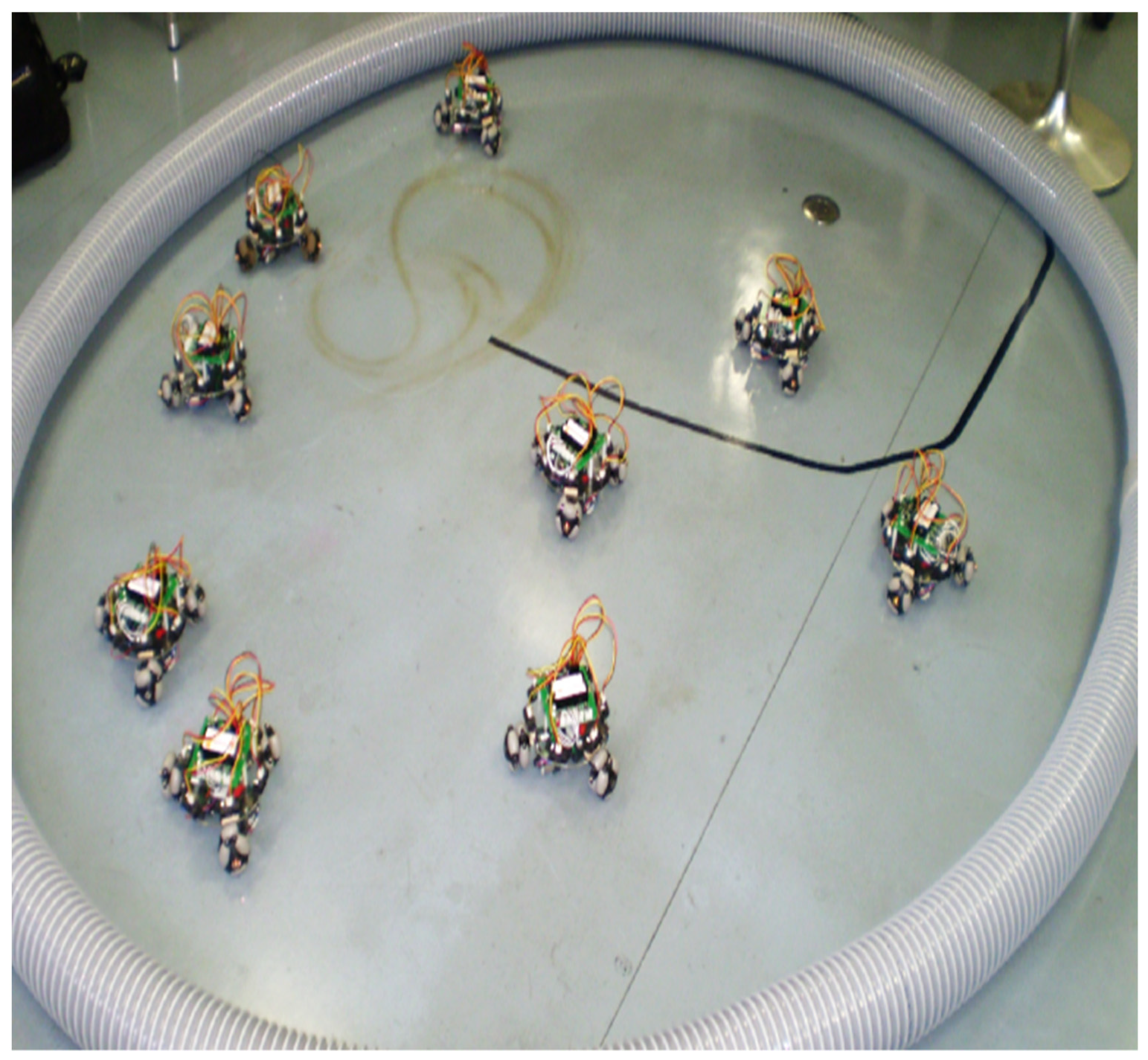
Figure 11. It is composed of four agents, in which the higher execution level priority is assigned to the upper agent. Each small circle with the letter ‘S’ inside represents a suppression node from a higher priority level to deactivate agent behavior(s) with low priority when more than one behavior agent is activated. The experimental scene of schooling behavior is shown in
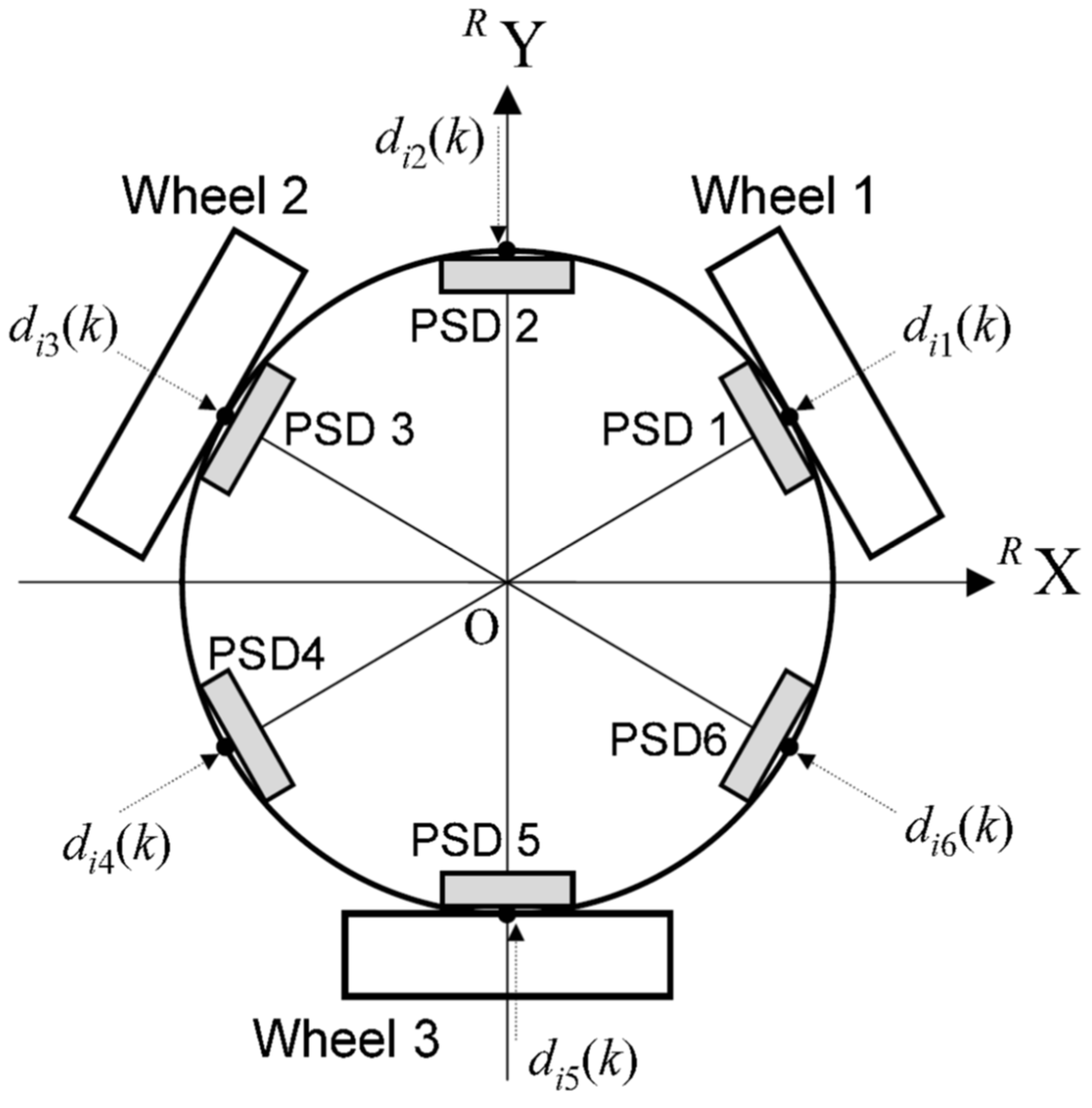
Figure 12. When schooling pattern modes of the mobile robots are selected, the robots regularly move to follow the inner side of the circular fence while trying to keep a constant distance between the robots and the fence, and also between the robots. This mode enables the behavior of the robots to mimic the carps’ movement in a circular artificial Japanese pond. Besides, in case a robot moves along the circular fence in a counterclockwise direction, the control law resulted from “Move forward” agent can be stated as bellow,
where
represents the linear velocity described in the
i-th robot, coordinate frame,
represents the normalized velocity for moving to Position Sensitive Detector (PSD) sensor 2, while
v is the magnitude of the robot’s linear velocity.
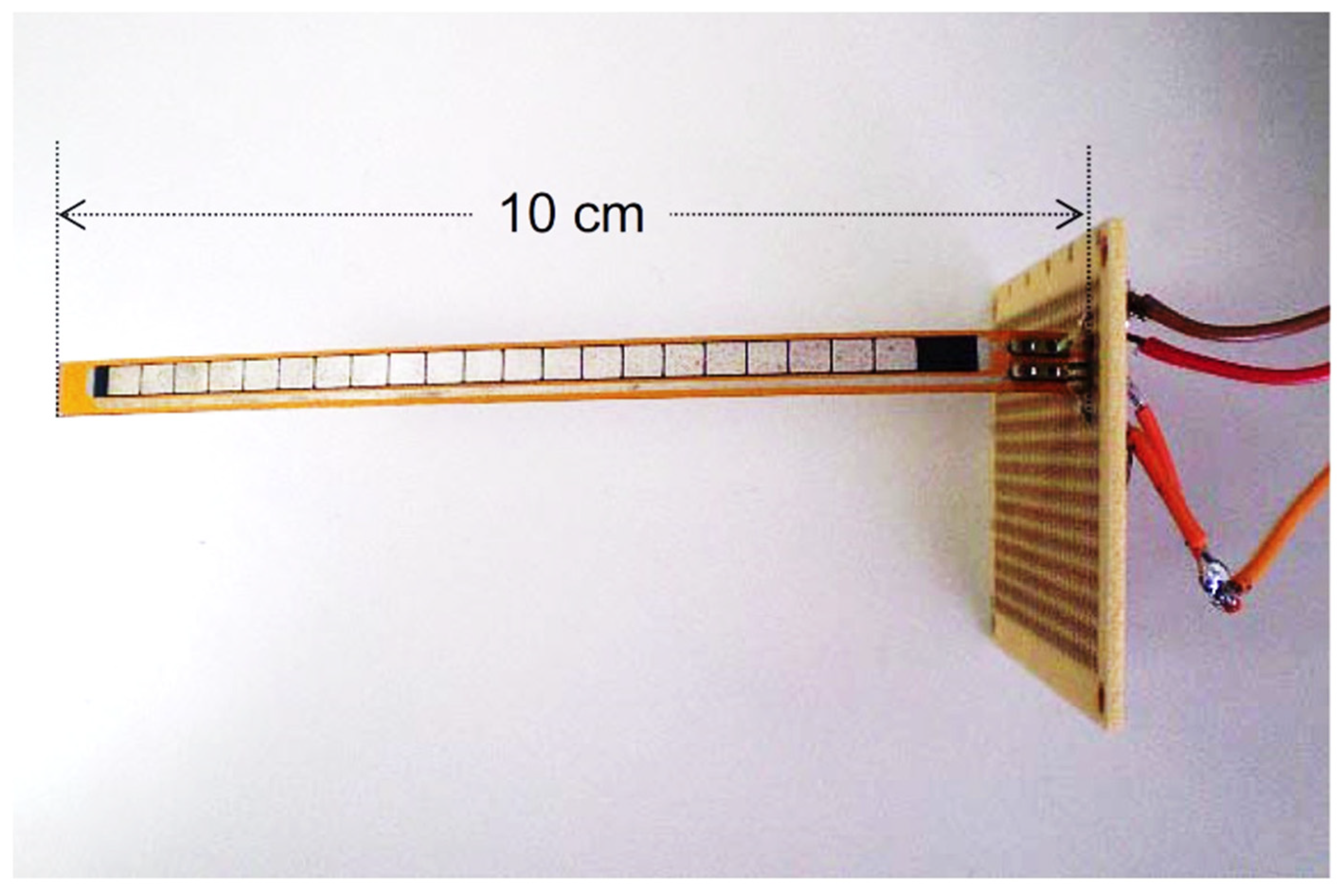
The configuration of the two tactile flex sensors and the six PSD sensors is illustrated in
Figure 13. The sensing distance range of the PSD sensor is between a maximum of 80 cm and a minimum of 10 cm. In addition,
Figure 14 presents the tactile flex sensor used with each robot. The degree of bending is measured, and the obtained analog signals from the sensors are converted to digital using the A/D converter module.
The robot’s orientation of a robot is controlled when by the higher priority agent “Turn to left or right” as
where
indicates to the rotational velocity;
di1(
k) and
di6(
k) are the measured values by the 1st and 6th PSD sensors of the
i-th robot, respectively;
Kϕ represents the gain used to keep and control the orientation of the robot parallel to the inner circular fence.
Besides this, the agent behavior “Avoid objects” actuates the robot’s wheels to avoid collisions when an object, including other robots, is detected within the effective PSD range. Furthermore, the agent behavior “Slowly turn to left or right” has to be activated when an object is detected by the flex sensor within a range of 10 cm by measuring the readings of fi1(k) and fi2(k). Students can learn the principles of how to build different levels of priorities of agent behaviors for single and multiple mobile robots through the use of the subsumption architecture.
Finally, students’ performance associated with lab experiments was assessed using two indicators and the results are shown in
Table 3. The results showed positive and effective outcomes.
6. Project-Based Learning
A project-based learning strategy is a comprehensive learning approach aiming to motivate and enhance the capacity of a student’s thinking skills [
28,
29,
30,
31,
32]. The adopted project-based learning approach is an integrated approach demand active student engagement in the investigation that focuses on considering realistic, complex, and open-ended, unstructured problems to coordinate all learning activities to find out innovative solutions to a problem. It is an integrated and holistic learning process the constitutes multiple milestones. These milestones start from team formation, specify the problem to solve, objectives, plan development, debating ideas, constraints, functional requirements (software and hardware), conceptual design, specifications, details design, implementation and troubleshooting, integration, demonstration, conclusions, reporting, and communicating the findings.
Project-based learning is student-centered, and it is facilitated by an instructor who motivates students to learn by applying the acquired knowledge, experience, and interdisciplinary skills through active and interactive engagement for the acquisition of new deeper knowledge and enhance thinking skills, and help to find new ideas and new solutions to solve interdisciplinary real-world challenges and problems that require to seek and use skills and knowledge from different knowledge domains. In addition, project-based learning through its activities helps team members to learn and inspire from each other through collaboration and facilitate deeper learning to represent knowledge and finding new ideas and solutions.
The presented four developed mechatronics experimental systems are used to build up acquired knowledge through experiments. The aim is to integrate the acquired knowledge foundation and enables students to demonstrate freely their skills through practice. It also facilitates a new added value experience with interdisciplinary knowledge from different perspectives while engaging them actively in the project activities. The challenges arise on how to apply such knowledge, skills, and experience through a new context to solving challenging real-life problems with which students never dealt with before. Besides this, it is also necessary to build team-based learning skills to meet professional challenges. Hence, project-based learning is the way to deal with such needs and requirements and fulfill the targeted educational values.
In project-based learning covered by this paper, students were divided into teams, and a coordinator is selected for each team from within to follow up the team interactive and collaborative work and communicate with the instructor. The target is to reflect on and improve their learning added values by developing creative and critical thinking skills, improving writing and communication skills by emphasizing student interest, while giving them the freedom and the responsibility to deliberate through brainstorming and deciding their project topic related to products or systems for each team separately. It is essential to have the communication line open between the instructor and each of the project teams to discuss their concerns, suggestions, and inquiries while receiving feedback on their reports and reflections. However, the following milestones represent the key stages conducted successfully for the adopted project-based learning approach:
For the purpose of assuring collaborative learning, project teams were formed with a size of 3–4 students each. Each team was asked to start deliberate, and think to list (5) topics of their interest without any constraints of time and required resources. Then, arrange the listed topics based on the priority of the team’s interest. Hence, the project starts from the seed level by considering the possible topics and uses design thinking supported by an effective strategy to overcome hurdles and reach the final stage.
While considering the scope of the listed topics, their requirements, and complexity, the instructor discusses that with each team, and the teams decide their project topic for each. Accordingly, the team prepares a brief report that contains a survey, the technical challenges, scope, objectives, and a methodology to achieve the objectives supported by project key milestones, times frame, with work distribution among team members. In addition, is it important to make the student learn how to reflect on each of the workings steps throughout the development process and also professionally adhere to their plan with the associated timeframe.
The next key milestone in project-based learning is developing the conceptual design thinking and design that covers: Technical specifications list supported by technical feedback and user needs from the market as relevant, list of functional requirements, operational scenarios, assumptions, and constraints. Then, a detailed design is prepared. After concluding this stage, a report has to be submitted with reflections on their experience, difficulties, and achievements.
Then, the team enters the milestone of hardware selection and software development details, integrates the system, and conducts troubleshooting. Furthermore, this stage is associated with report writing integrated with the previous report while considering the feedback on the earlier submissions.
The final milestone is to test and demonstrate the developed system under different operational circumstances, evaluate and reflect on the whole process. A final integrated report has to be submitted, and a team presentation is scheduled and conducted by each team with the participation of each team member. All teams have to attend the final presentation while encouraging interactive questions and answers among the students and with the instructor about the content of each presentation.
Documentation is an essential part of the work related to project-based learning that should be going in parallel through all the stages of the project.
According to the experience of the conducted experimental systems, problem-solving and project-based learning during the last three years. Three key indicators were assessed and related to the size of the class between 25–30 students.
Table 4 presents the students’ performance assessment associated with three performance indicators.
Finally, and through the obtained experience in the field, the following guidelines have been concluded to help to guide project-based learning and maximize the learning outcomes:
Decide the term and the target learning skills of each project-based learning by defining the problem and the goals. Project term can range from one week, a few weeks, a month, or the full term of a course. The scope and size of the project can vary from one area or topic to another,
Form small teams with size between 3–4 of each, and the team assigns one of the team members as a coordinator,
Establish a target scope with key outcomes to guide students to deliberate and conclude a list of topics within the announced scope. The instructor should communicate to the students the learning goals of the project.
Each team starts to ask questions, and the instructor should listen and answer for the purpose, to clarify the dimensions, prospect, and nature of the project scope, topics, and what they are aiming to solve and obtain. This helps to define the selected topic within the targeted context. In product-related projects, it is necessary to frame the outcomes in a way that benefit the end-users of the targeted product,
Each team works to have brainstorming sessions to list according to their interest the possible topics of interest reflecting the announced scope. The role of the instructor here is to help the team to identify and finalize a potential problem/topic, and list the required functionalities, the achievements concluded in the field of the topic, constraints, assumptions, and challenges. The constraints may cover technical, financial, and social are relevant. In order to maximize learning through the project work, it is necessary for the instructor to guide each team to select an unstructured open-ended project topic. It has been proved that selecting and open-ended unstructured problems help students to find out their way to structure multiple solutions to the problem, and this supports collaborative and deeper learning, and helps to develop students’ ability to apply the acquired knowledge and adapt it to solve problems that they didn’t try before,
Develop a plan with key milestones with the timeframe mapped into the project assigned timing. Flexibility is needed with a consultation to adjust the plan, and the process according to the work progress, the team with the support of the coordinator assigns work distribution among the members for each milestone. Each assigned work should be documented and reported to all team members,
Each team starts to discuss different ideas and develops different scenarios for possible solutions, evaluating them with emphasis on the effective one. All students in each team should be engaged inter-team discussions to inspire each other and give them the freedom to state and list their ideas and views. All suggested ideas should be discussed and assessed toward the best solution. Each team is asked to state something unique about the selected idea,
The team should develop a methodology on how to implement the selected idea by developing a road map to realize the best solution with possible expansion (concepts, ideas, and visualization). This may include, conceptual design, different forms of prototype development, analysis, etc. This helps the team to uncover possible challenges associated with the selected solution and adjust accordingly through an iterative approach,
The instructor should consolidate the work process and progress by assuring the proper number of reporting during the term of the project and assure proper and timely feedback to the team on their progress with suggestions, and
In project-based learning, the learning is taken place through a process during the term of the project. Hence, assessing project-based learning should focus on the process through all of its milestones and not just focusing on the final results. The assessment should encourage the students to reflect on each milestone and through the project.
7. Conclusions
This paper focused on the importance of experiential learning and its contributions to utilize acquired knowledge and experience to develop creative and critical thinking skills through its added value activities aiming to improve the quality of students’ learning outcomes. In order to support achieving such mainstream goals, experimental laboratory content was designed. The laboratory content was facilitated by the development of four mechatronics experimental systems. The developed systems were used as an effective exploratory learning environment with a focus to enhance the outcomes of the integrated learning process, motivate students through practical design and implementation work, solving real-life problems and stimulate thinking to find out new ways and solutions to solve problems and form new ideas that establish the base of building creative thinking skills which can accommodate the ability for innovations and inventions. These systems enabled students to synergize theoretical knowledge with practical mechatronics technological experience using sensors, motor, control, controllers design, information processing and programming while steaming up students’ motivation and enjoyment. Furthermore, a project-based learning approach both individual and team-based were integrated with the developed concepts and the experimental mechatronics systems to enhance students’ innovation capabilities through a thinking-based design process.
Although each of the developed systems is simple and primitive, integrating these systems with experiments, knowledge, experience, and skills besides other hardware and software can encourage students to solve complex and realistic problems. Moreover, build complex behavioral agent levels using the primitive ones, improve performance and enhance the outcomes of the learning process. The effectiveness of the developed mechatronics experimental systems I, II, III, and IV were evaluated through the experimental laboratory sessions and project-based learning at the Sanyo-Onoda City University, Yamaguchi, Japan, and at the American University in Cairo. Finally, students were divided into teams and asked to select a problem/topic and apply project-based learning with no given list of project titles. The projects’ topics were generated through brainstorming sessions and interactive student-centered discussion by the team members with the final endorsement by the instructor. The selected project topic then went through all necessary design thinking, interactive collaboration, and development processes while the faculty facilitates this process. Finally, students made their reflections about the experience of project-based learning and list the newly concluded knowledge and skills obtained through this exercise, and share this experience with other project groups through an open team-based presentation.
The conclusions through the experiences with project-based learning led to developing effective guidelines that specify the best practices associated with the framework of achieving high-quality learning. Project-based learning should highlight and focus on the value of learning and the learning competencies that lead to better achievements, and not just on the learning as a process. This differentiates project-based learning from just conducting projects. Project-based learning should give students the space to voice out their ideas, discuss them, have fun, interact, and raise concerns and inquiries while they need to be inspired for high-level achievements. The project-based learning, with such an open space of skills and content integration will have (besides the value of learning) a good social impact. Finally, the experience through this work highlight the needs to start shifting to student centered learning techniques. The methodology that encourages students’ effective engagement by contributing to lectures, assignments, laboratory experiments, and projects, while the instructor must facilitate, update, and guide the learning process. Furthermore, assessing students’ performance and activities in a course should be considered holistically by looking at students’ achievements as a whole.
To address the educational and teaching needs during the Covid-19 pandemic, the developed mechatronics experimental systems can be integrated remotely as an option to support remote teaching.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}