
Optimization Environment Definition for Beam Steering Reflectarray Antenna Design

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Antenna and Optimization Environment Description
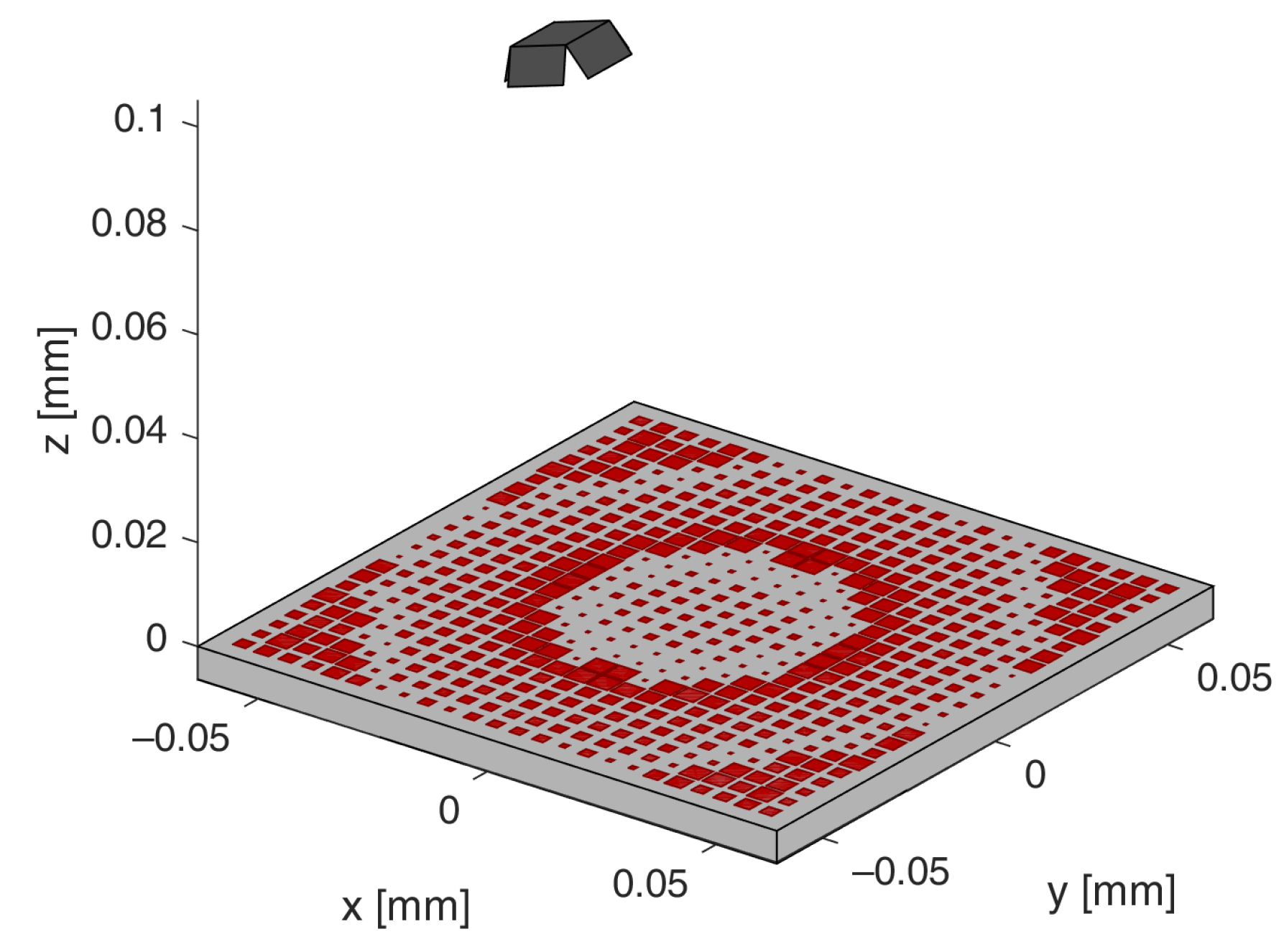
2.1. Antenna Geometry
2.2. Performance Parameters
2.3. Optimization Environment
3. Evolutionary Algorithms
3.1. Differential Evolution
3.2. Genetic Algorithm
3.3. Biogeography Based Optimization
3.4. Particle Swarm Optimization
3.5. Social Network Optimization
4. Antenna Optimization Results and Discussion
4.1. Feasibility Function
4.2. Cost Function Parameter Definition
4.3. Algorithm Comparison
4.4. Analysis of the Final Solution
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Goudos, S.K.; Kalialakis, C.; Mittra, R. Evolutionary algorithms applied to antennas and propagation: A review of state of the art. Int. J. Antennas Propag. 2016, 2016, 1010459. [Google Scholar] [CrossRef]
- Niccolai, A.; Bettini, L.; Zich, R. Optimization of electric vehicles charging station deployment by means of evolutionary algorithms. Int. J. Intell. Syst. 2021, 36, 5359–5383. [Google Scholar] [CrossRef]
- Massa, A.; Salucci, M. On the Design of Complex EM Devices and Systems through the System-by-Design Paradigm—A Framework for Dealing with the Computational Complexity. IEEE Trans. Antennas Propag. 2021. [Google Scholar] [CrossRef]
- Capozzoli, A.; Curcio, C.; Liseno, A. CUDA-based particle swarm optimization in reflectarray antenna synthesis. Adv. Electromagn. 2020, 9, 66–74. [Google Scholar] [CrossRef]
- Nayeri, P.; Yang, F.; Elsherbeni, A.Z. Reflectarray Antennas: Theory, Designs and Applications; Wiley Online Library: Hoboken, NJ, USA, 2018. [Google Scholar]
- Li, W.; Gao, S.; Zhang, L.; Luo, Q.; Cai, Y. An ultra-wide-band tightly coupled dipole reflectarray antenna. IEEE Trans. Antennas Propag. 2017, 66, 533–540. [Google Scholar] [CrossRef]
- Dahri, M.H.; Jamaluddin, M.H.; Abbasi, M.I.; Kamarudin, M.R. A review of wideband reflectarray antennas for 5G communication systems. IEEE Access 2017, 5, 17803–17815. [Google Scholar] [CrossRef]
- Karimipour, M.; Komjani, N. Bandwidth enhancement of electrically large shaped-beam reflectarray by modifying the shape and phase distribution of reflective surface. AEU Int. J. Electron. Commun. 2016, 70, 530–538. [Google Scholar] [CrossRef]
- Huang, J.; Encinar, J.A. Reflectarray Antennas; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Sakagawa, K.; Inoue, H.; Higashi, D.; Deguchi, H.; Tsuji, M. Design of a Dual-Band Single Layer Reflectarray with Arbitrarily-Shaped Elements. In Proceedings of the 2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, Montreal, QC, Canada, 5–10 July 2020; pp. 93–94. [Google Scholar]
- Nouri, F.; Jam, S.; Basiri, R. The design of a wideband single-layer dual-band reflectarray antenna based on an optimized element. J. Comput. Electron. 2019, 18, 178–188. [Google Scholar] [CrossRef]
- Li, C.; Xu, S.; Yang, F.; Li, M. Design and optimization of a mechanically reconfigurable reflectarray antenna with pixel patch elements using genetic algorithm. In Proceedings of the 2019 IEEE MTT-S International Wireless Symposium (IWS), Guangzhou, China, 19–22 May 2019; pp. 1–3. [Google Scholar]
- Ohsawa, T.; Maruyama, T.; Omiya, M.; Suematsu, N. Design of Dual-frequency Reflectarray Using Particle Swam Optimization. In Proceedings of the 2018 International Symposium on Antennas and Propagation (ISAP), Busan, Korea, 23–26 October 2018; pp. 1–2. [Google Scholar]
- Belen, A.; Güneş, F.; Belen, M.A.; Mahouti, P. 3D printed wideband flat gain multilayer nonuniform reflectarray antenna for X-band applications. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2753. [Google Scholar] [CrossRef]
- Rezaei, F.; Safavi, H.R. GuASPSO: A new approach to hold a better exploration–exploitation balance in PSO algorithm. Soft Comput. 2020, 24, 4855–4875. [Google Scholar] [CrossRef]
- Li, W.T.; Shi, X.W.; Hei, Y.Q.; Liu, S.F.; Zhu, J. A hybrid optimization algorithm and its application for conformal array pattern synthesis. IEEE Trans. Antennas Propag. 2010, 58, 3401–3406. [Google Scholar] [CrossRef]
- Jia, X.; Lu, G. A hybrid Taguchi binary particle swarm optimization for antenna designs. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1581–1585. [Google Scholar] [CrossRef]
- Yigit, M.E.; Giinel, T. Pattern synthesis of linear antenna array via a new hybrid Taguchi-genetic-particle swarm optimization algorithm. In Proceedings of the 2018 18th Mediterranean Microwave Symposium (MMS), Istanbul, Turkey, 31 October–2 November 2018; pp. 17–21. [Google Scholar]
- Yang, J.; Yang, P.; Yang, F.; Xing, Z.; Ma, X.; Yang, S. A Hybrid Approach for the Synthesis of Nonuniformly-Spaced Linear Subarrays. IEEE Trans. Antennas Propag. 2020, 69, 195–205. [Google Scholar] [CrossRef]
- Zhang, S.R.; Zhang, Y.X.; Cui, C.Y. Efficient Multiobjective Optimization of Time Modulated Array Using a Hybrid Particle Swarm Algorithm with Convex Programming. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 1842–1846. [Google Scholar] [CrossRef]
- Nayeri, P.; Yang, F.; Elsherbeni, A.Z. Beam-Scanning Reflectarray Antennas: A technical overview and state of the art. IEEE Antennas Propag. Mag. 2015, 57, 32–47. [Google Scholar] [CrossRef]
- Carrasco, E.; Barba, M.; Encinar, J.A. Reflectarray element based on aperture-coupled patches with slots and lines of variable length. IEEE Trans. Antennas Propag. 2007, 55, 820–825. [Google Scholar] [CrossRef]
- Beccaria, M.; Pirinoli, P.; Dassano, G.; Orefice, M. Design and experimental validation of convex conformal reflectarray antennas. Electron. Lett. 2016, 52, 1511–1512. [Google Scholar] [CrossRef] [Green Version]
- Dahri, M.H.; Jamaluddin, M.H.; Seman, F.C.; Abbasi, M.I.; Ashyap, A.Y.; Kamarudin, M.R.; Hayat, O. A Novel Asymmetric Patch Reflectarray Antenna with Ground Ring Slots for 5G Communication Systems. Electronics 2020, 9, 1450. [Google Scholar] [CrossRef]
- Beccaria, M.; Niccolai, A.; Zich, R.E.; Pirinoli, P. Shaped-Beam Reflectarray Design by Means of Social Network Optimization (SNO). Electronics 2021, 10, 744. [Google Scholar] [CrossRef]
- Niccolai, A.; Zich, R.; Beccaria, M.; Pirinoli, P. SNO Based Optimization for Shaped Beam Reflectarray Antennas. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–4. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Price, K.V. Differential evolution. In Handbook of Optimization; Springer: New York, NY, USA, 2013; pp. 187–214. [Google Scholar]
- Khatib, W.; Fleming, P.J. The stud GA: A mini revolution? In International Conference on Parallel Problem Solving from Nature; Springer: New York, NY, USA, 1998; pp. 683–691. [Google Scholar]
- Grimaccia, F.; Mussetta, M.; Niccolai, A.; Zich, R.E. Comparison of binary evolutionary algorithms for optimization of thinned array antennas. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Simon, D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Mussetta, M.; Pirinoli, P. MmCn-BBO schemes for electromagnetic problem optimization. In Proceedings of the 2013 7th European Conference on Antennas and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013; pp. 1058–1059. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95, the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Song, C.; Pan, L.; Jiao, Y.; Jia, J. A high-performance transmitarray antenna with thin metasurface for 5G communication based on PSO (Particle Swarm Optimization). Sensors 2020, 20, 4460. [Google Scholar] [CrossRef] [PubMed]
- Niccolai, A.; Grimaccia, F.; Mussetta, M.; Zich, R. Optimal Task Allocation in Wireless Sensor Networks by Means of Social Network Optimization. Mathematics 2019, 7, 315. [Google Scholar] [CrossRef] [Green Version]
- Simon, D. Evolutionary Optimization Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Niccolai, A.; Grimaccia, F.; Mussetta, M.; Gandelli, A.; Zich, R. Social network optimization for WSN routing: Analysis on problem codification techniques. Mathematics 2020, 8, 583. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Box Condition | Mean | Standard Deviation | Best Result |
|---|---|---|---|
| Impenetrable wall | 191.41 | 19.75 | 164.14 |
| Elastic wall | 201.08 | 52.76 | 159.1 |
| Eliminating wall | 2566.66 | 527.95 | 1452.67 |
| Closed space | 291.09 | 62.12 | 219.96 |
| Algorithm | DE | GA | SGA | mBBO | nBBO | PSO | SNO |
|---|---|---|---|---|---|---|---|
| Population size | 25 | 50 | 25 | 25 | 25 | 25 | 100 |
| Algorithm | Mean | Standard Deviation | Best Result |
|---|---|---|---|
| DE | 196.57 | 67.49 | 125.13 |
| GA | 6124.97 | 1329.65 | 4224.91 |
| SGA | 873.38 | 1778.9 | 234.97 |
| mBBO | 539.64 | 106.72 | 335.32 |
| nBBO | 402.39 | 106.84 | 269.46 |
| PSO | 26,823.4 | 6314.18 | 13,603.59 |
| SNO | 195.95 | 27.65 | 154.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niccolai, A.; Grimaccia, F.; Mussetta, M.; Zich, R.; Gandelli, A. Optimization Environment Definition for Beam Steering Reflectarray Antenna Design. Mathematics 2022, 10, 33. https://doi.org/10.3390/math10010033
Niccolai A, Grimaccia F, Mussetta M, Zich R, Gandelli A. Optimization Environment Definition for Beam Steering Reflectarray Antenna Design. Mathematics. 2022; 10(1):33. https://doi.org/10.3390/math10010033
Chicago/Turabian StyleNiccolai, Alessandro, Francesco Grimaccia, Marco Mussetta, Riccardo Zich, and Alessandro Gandelli. 2022. "Optimization Environment Definition for Beam Steering Reflectarray Antenna Design" Mathematics 10, no. 1: 33. https://doi.org/10.3390/math10010033