
Noise-to-State Stability in Probability for Random Complex Dynamical Systems on Networks


{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
- 2.
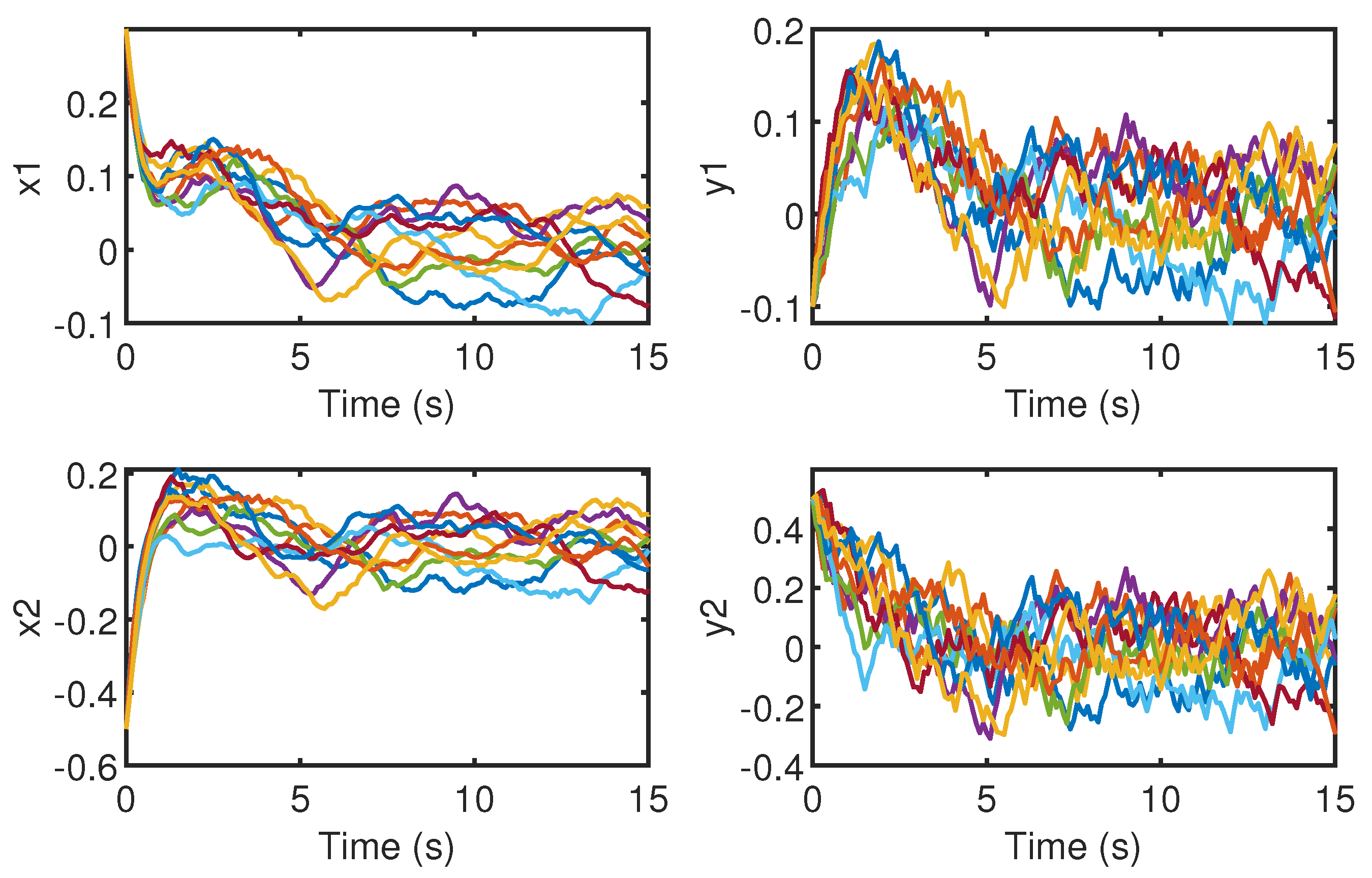
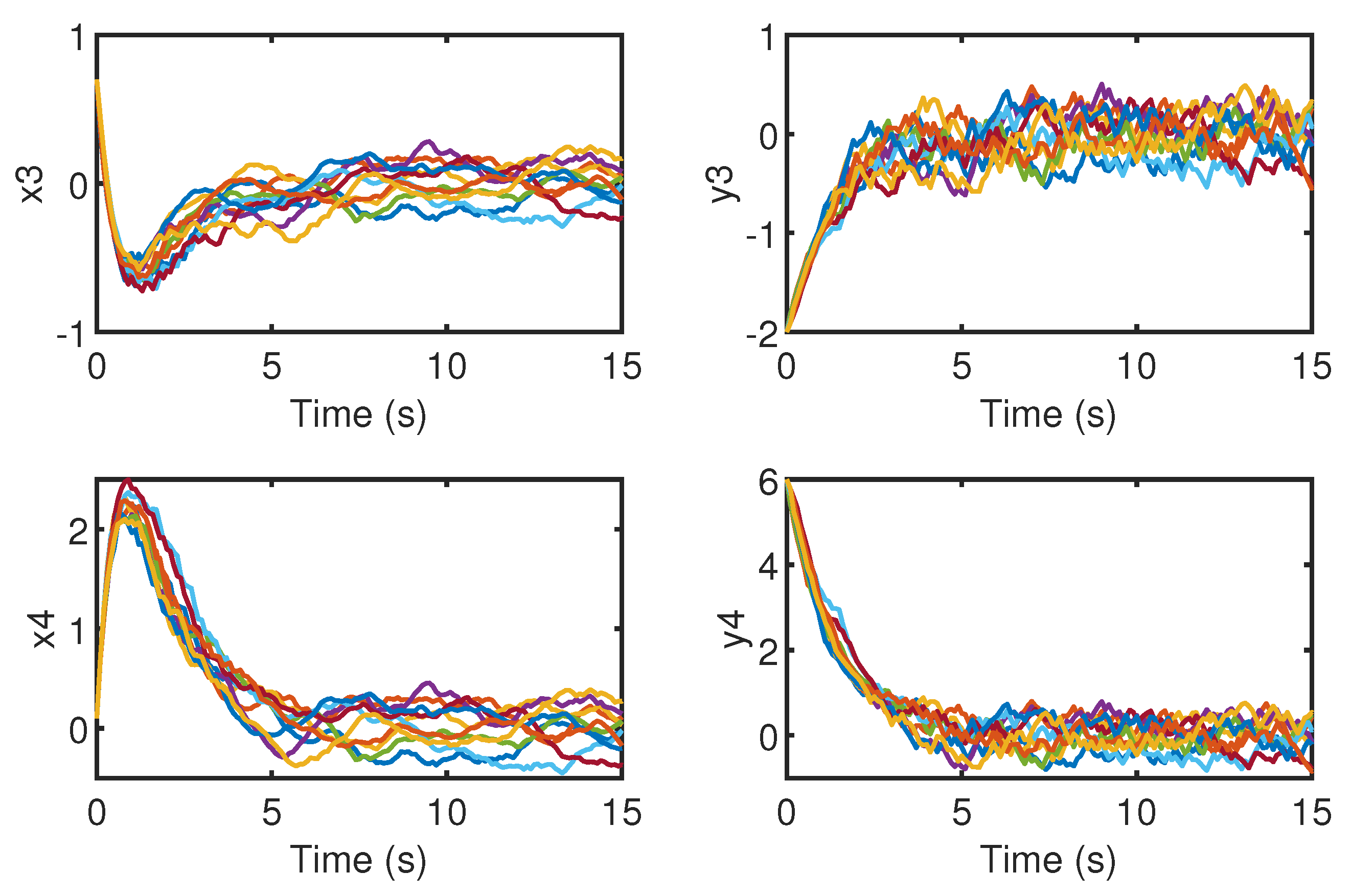
- The main result is applied to random coupled oscillators on networks (RCON), and its usefulness and effectiveness can be fully demonstrated in some numerical tests.
2. Notations
3. Model Description and Preliminaries
4. Main Results
5. An Application to Random Coupled Oscillators on Networks
6. Numerical Test
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, S.G.; Huang, L.T.; Xu, G.D.; Wu, X.D.; Wu, Z.H. On Deep Learning for Trust-Aware Recommendations in Social Networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1757–1762. [Google Scholar] [CrossRef]
- Yu, J.; Hu, C.; Jiang, H.J.; Wang, L.M. Exponential and adaptive synchronization of inertial complex-valued neural networks: A non-reduced order and non-separation approach. Neural Netw. 2020, 124, 50–59. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.N.; Zang, Z.Y. State Estimation for Complex-Valued Inertial Neural Networks with Multiple Time Delays. Mathematics 2022, 10, 1725. [Google Scholar] [CrossRef]
- Pang, L.; Hu, C.; Yu, J.; Jiang, H.J. Fixed-Time Synchronization for Fuzzy-Based Impulsive Complex Networks. Mathematics 2022, 10, 1533. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, P.R.; Chu, D.H.; Su, H. Stationary distribution of stochastic multi-group models with dispersal and telegraph noise. Nonlinear Anal. Hybrid Syst. 2019, 33, 93–103. [Google Scholar] [CrossRef]
- Wang, P.F.; Hong, Y.; Su, H. Asymptotic stability in probability for discrete-time stochastic coupled systems on networks with multiple dispersal. Int. J. Robust Nonlinear Control 2018, 28, 1199–1217. [Google Scholar] [CrossRef]
- Jing, G.S.; Zheng, Y.S.; Wang, L. Consensus of Multiagent Systems with Distance-Dependent Communication Networks. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2712–2726. [Google Scholar] [CrossRef]
- Zhao, C.; Zhong, S.M.; Zhong, Q.S.; Shi, K.B. Synchronization of Markovian complex networks with input mode delay and Markovian directed communication via distributed dynamic event-triggered control. Nonlinear Anal. Hybrid Syst. 2020, 36, 100883. [Google Scholar] [CrossRef]
- Wu, Y.B.; Li, Y.C.; Li, W.X. Almost surely exponential synchronization of complex dynamical networks under aperiodically intermittent discrete observations noise. IEEE Trans. Cybern. 2020, 52, 2663–2674. [Google Scholar] [CrossRef]
- Jiao, T.C.; Zong, G.D.; Ahn, C.K. Noise-to-state practical stability and stabilization of random neural networks. Nonlinear Dyn. 2020, 100, 2469–2481. [Google Scholar] [CrossRef]
- Yao, L.Q.; Zhang, W.H. New noise-to-state stability and instability criteria for random nonlinear systems. Int. J. Robust Nonlinear Control 2020, 30, 526–537. [Google Scholar] [CrossRef]
- Gao, S.; Peng, C.; Li, J.X.; Kang, R.; Liu, X.Q.; Zhang, C.R. Global asymptotic stability in mean for stochastic complex networked control systems. Commun. Nonlinear Sci. Numer. Simul. 2022, 107, 106162. [Google Scholar] [CrossRef]
- Gao, S.; Wu, B.Y. On input-to-state stability for stochastic coupled control systems on networks. Appl. Math. Comput. 2015, 262, 90–101. [Google Scholar] [CrossRef]
- Wang, P.F.; Wang, S.Q.; Su, H. Stochastic input-to-state stability of impulsive stochastic nonlinear systems in infinite dimensions. Siam J. Control. Optim. 2021, 59, 2774–2797. [Google Scholar] [CrossRef]
- Wu, Y.B.; Guo, H.H.; Li, W.X. Finite-time stabilization of stochastic coupled systems on networks with Markovian switching via feedback control. Phys. Stat. Mech. Appl. 2020, 537, 122797. [Google Scholar] [CrossRef]
- Wu, Z.J. Stability criteria of random nonlinear systems and their applications. IEEE Trans. Autom. Control 2015, 60, 1038–1049. [Google Scholar] [CrossRef]
- Li, M.Y.; Shuai, Z.S. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Deng, H.; Krstić, M. Output-feedback stabilization of stochastic nonlinear systems driven by noise of unknown covariance. Automatic 2000, 39, 173–182. [Google Scholar] [CrossRef]
- Douglas, B.W. Introduction to Graph Theory; Prentice Hall: Hoboken, NJ, USA, 2001; pp. 300–588. [Google Scholar]
- Rahaman, M.H.; Hasan, M.K.; Ali, A.; Alam, M.S. Implicit Methods for Numerical Solution of Singular Initial Value Problems. Appl. Math. Nonlinear Sci. 2020, 2, 00001. [Google Scholar] [CrossRef]
- Liu, D.J.; He, W. Numerical Simulation Analysis Mathematics of Fluid Mechanics for Semiconductor Circuit Breaker. Appl. Math. Nonlinear Sci. 2021, 2, 00024. [Google Scholar] [CrossRef]
- Gao, W.; Veeresha, P.; Cattani, C.; Baishya, C.; Baskonus, H.M. Modified Predictor Corrector Method for the Numerical Solution of a Fractional-Order SIR Model with 2019-nCoV. Fractal Fract. 2022, 6, 92. [Google Scholar] [CrossRef]
- Srinivasa, K.; Baskonus, H.M.; Sánchez, Y.G. Numerical Solutions of the Mathematical Models on the Digestive System and COVID-19 Pandemic by Hermite Wavelet Technique. Symmetry 2022, 13, 2428. [Google Scholar] [CrossRef]
- Chi, J.Q.; Alahmadi, D. Badminton players’ trajectory under numerical calculation method. Appl. Math. Nonlinear Sci. 2021, 2, 00125. [Google Scholar]
- Xu, L.Y.; Aouad, M. Application of Lane-Emden differential equation numerical method in fair value analysis of financial accounting. Appl. Math. Nonlinear Sci. 2021, 1, 00094. [Google Scholar] [CrossRef]
- Sabir, Z.; Wahab, H.A.; Javeed, S.; Baskonus, H.M. Efficient Stochastic Numerical Computing Framework for the Nonlinear Higher Order Singular Models. Fractal Fract. 2021, 5, 176. [Google Scholar] [CrossRef]
- Yin, K.L.; Pu, Y.F.; Lu, L. Combination of fractional FLANN filters for solving the Van der Pol-Duffing oscillator. Neurocomputing 2020, 399, 183–192. [Google Scholar] [CrossRef]
- Song, Q.; Liu, F.; Wen, G.H.; Qiu, J.L.; Tang, Y. Synchronization of coupled harmonic oscillators via sampled position data control. IEEE Trans. Circuits Syst. 2016, 63, 1079–1088. [Google Scholar] [CrossRef]
- D’Huys, O.; Jüngling, T.; Kinzel, W. Stochastic switching in delay-coupled oscillaors. Phys. Rev. Stat. Nonlin. Soft Matter Phys. 2014, 90, 032918. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.B.; Chen, B.D.; Li, W.X. Synchronization of stochastic coupled systems via feedback control based on discrete-time state observations. Nonlinear Anal. Hybrid Syst. 2017, 26, 68–85. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.; Ma, J.; Li, Q.; Gao, S. Noise-to-State Stability in Probability for Random Complex Dynamical Systems on Networks. Mathematics 2022, 10, 2096. https://doi.org/10.3390/math10122096
Peng C, Ma J, Li Q, Gao S. Noise-to-State Stability in Probability for Random Complex Dynamical Systems on Networks. Mathematics. 2022; 10(12):2096. https://doi.org/10.3390/math10122096
Chicago/Turabian StylePeng, Cheng, Jiaxin Ma, Qiankun Li, and Shang Gao. 2022. "Noise-to-State Stability in Probability for Random Complex Dynamical Systems on Networks" Mathematics 10, no. 12: 2096. https://doi.org/10.3390/math10122096
APA StylePeng, C., Ma, J., Li, Q., & Gao, S. (2022). Noise-to-State Stability in Probability for Random Complex Dynamical Systems on Networks. Mathematics, 10(12), 2096. https://doi.org/10.3390/math10122096