
Full Duplex Relaying with Intelligent Reflecting Surface: Joint Beamforming and Phase Adjustment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model
3. Beamformer Design
3.1. The Source Beamformer Optimization
| Algorithm 1 The source beamformer optimization algorithm |
|
3.2. The FDR Beamformer Optimization
| Algorithm 2 The FDR beamformer optimization algorithm |
|
3.3. IRS Phase Shifter Optimization
| Algorithm 3 Φ decision algorithms |
|
3.4. Alternating Optimization and Computational Complexity
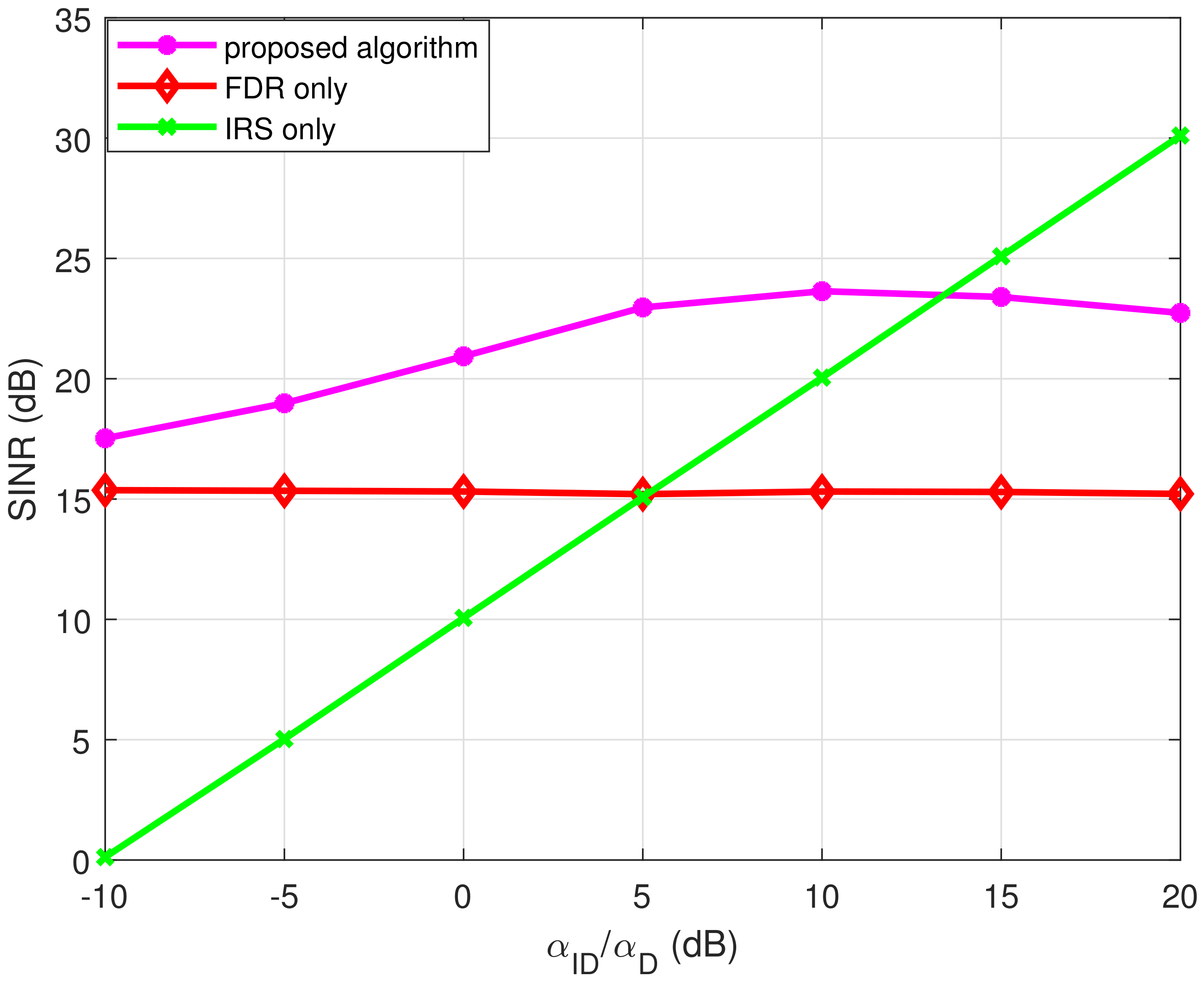
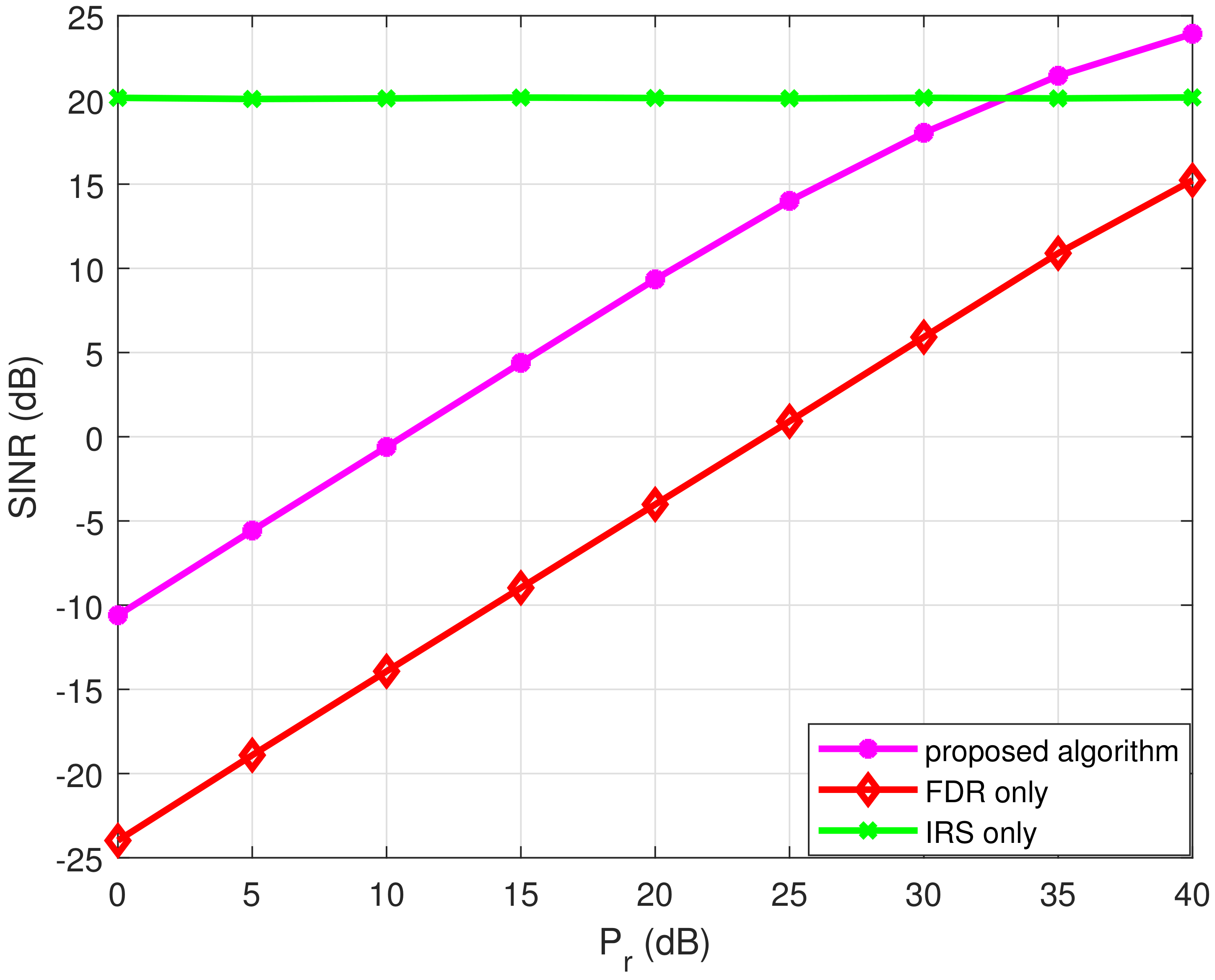
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ding, Z.; Krikidis, I.; Rong, B.; Thompson, J.S.; Wang, C.; Yang, S. On combating the half-duplex constraint in modern cooperative networks: Protocols and Techniques. IEEE Wirel. Commun. 2012, 19, 20–27. [Google Scholar] [CrossRef]
- Sabharwal, A.; Schniter, P.; Guo, D.; Bliss, D.W.; Rangaraian, S.; Wichman, R. In-Band Full-Duplex Wireless: Challenges and Opportunities. IEEE J. Selec. Areas Commun. 2014, 32, 1637–1653. [Google Scholar] [CrossRef]
- Wang, L.; Tian, F.; Svensson, T.; Feng, D.; Song, M.; Li, S. Exploiting full duplex for device-to-device communications in heterogeneous networks. IEEE Commun. Mag. 2015, 53, 146–152. [Google Scholar] [CrossRef]
- Liu, G.; Yu, F.R.; Ji, H.; Leung, V.C.M.; Li, X. In-band full-duplex relaying: A survey, research and challenges. IEEE Commun. Surv. Tut. 2015, 17, 500–524. [Google Scholar] [CrossRef]
- Riihonen, T.; Werner, S.; Wichman, R. Mitigation of loopback Self-Interference in Full-Duplex MIMO Relays. IEEE Trans. Signal Process. 2011, 59, 5983–5993. [Google Scholar] [CrossRef]
- Hwang, D.; Yang, J.; Nam, S.S. SINR maximizing Beamforming Schemes for the Full Duplex Amplify-and-Forward Relay Channel. IEEE Access 2017, 5, 18987–18998. [Google Scholar] [CrossRef]
- Hwang, D.; Hwang, K.C.; Kim, D.I.; Lee, T.J. Self-Energy Recycling for RF Powered Multi-Antenna Relay Channels. IEEE Trans. Wirel. Commun. 2017, 16, 812–824. [Google Scholar] [CrossRef]
- Day, B.P.; Margetts, A.R.; Bliss, D.W.; Schniter, P. Full-Duplex MIMO Relaying: Achievable Rates Under Limited Dynamic Range. IEEE J. Sel. Areas Commun. 2012, 30, 1541–1553. [Google Scholar] [CrossRef]
- Charlise, B.K.; Ma, W.K.; Zhang, Y.D.; Suraweera, H.A.; Amin, M.G. Optimum Performance Boundaries of OSTBC Based AF-MIMO Relay Systems With Energy Harvesting Receiver. IEEE Trans. Signal Process. 2013, 61, 4199–4213. [Google Scholar] [CrossRef]
- Cirik, A.C.; Rong, Y.; Hua, Y. Achievable Rates of Full-Duplex MIMO Radios in Fast Fading Channels With Imperfect Channel Estimation. IEEE Trans. Signal Process. 2014, 63, 3874–3886. [Google Scholar] [CrossRef] [Green Version]
- Cirik, A.C.; Hua, Y.; Latva-aho, M. Weighted Sum-Rate Maximization for Full-Duplex MIMO Interference Channels. IEEE Trans. Commun. 2015, 63, 801–815. [Google Scholar] [CrossRef]
- Suraweera, H.A.; Krikidis, I.; Zheng, G.; Yuen, C.; Smith, P.J. Low-Complexity End-to-End Performance Optimization in MIMO Full-Duplex Relay Systems. IEEE Trans. Wirel. Commun. 2014, 13, 913–927. [Google Scholar] [CrossRef]
- Zheng, G. Joint Beamforming Optimization and Power Control for Full-Duplex MIMO Two-Way Relay Channel. IEEE Trans. Commun. 2015, 63, 555–566. [Google Scholar] [CrossRef]
- Shim, Y.; Choi, W.; Park, H. Beamforming Design for Full-Duplex Two-Way Amplify-ad-Forward MIMO Relay. IEEE Trans. Wirel. Commun. 2016, 15, 6705–6715. [Google Scholar] [CrossRef]
- Heath, R.W.; Gonzalez-Prelcic, N.; Rangan, S.; Rho, W.; Sayeed, A.M. An Overview of Signal Processing Techniques for Millimeter Wave MIMO Systems. IEEE J. Sel. Top. Signal Process. 2016, 10, 436–453. [Google Scholar] [CrossRef]
- Han, S.; Xu, C.I.Z.; Rowell, C. Large-Scale Antenna Systems with Hybrid Analog and Digital Beamforming for Millimeter Wave 5G. IEEE Commun. Mag. 2015, 53, 186–194. [Google Scholar] [CrossRef]
- Molisch, A.F.; Ratnam, V.V.; Han, S.; Li, Z.; Nguyen, S.L.H.; Li, L.; Haneda, K. Hybrid Beamforming for Massive MIMO: A Survey. IEEE Commun. Mag. 2017, 55, 134–141. [Google Scholar] [CrossRef]
- Alkhateeb, A.; Ayach, O.E.; Leus, G.; Heath, R.W. Channel Estimation and Hybrid Prcoding for Millimeter Wave Cellular Systems. IEEE J. Sel. Top. Signal Process. 2014, 8, 831–846. [Google Scholar] [CrossRef]
- Ayach, O.E.; Rajagopal, S.; Abu-Surra, S.; Pi, Z.; Heath, R.W. Spatially Sparse Precoding in Millimeter Wave MIMO Systems. IEEE Trans. Wirel. Commun. 2014, 13, 1499–1513. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Beamforming Optimization for Intelligent Reflecting Surface with Discrete Phase Shifts. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing, Brighton, UK, 12–17 May 2019. [Google Scholar]
- Hu, S.; Rusek, F.; Edfors, O. Beyond Massive MISO: ThePotential of Data Transmission With Large Intelligent Surfaces. IEEE Trans. Signal Process. 2018, 66, 2746–2758. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zhang, R. Intelligent Reflecting Surface Enahnced Wireless Network via Joint Active and Passive Beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflectig Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, Y.A.; Shi, Y.; Liu, H. Reconfigurable-Intelligent-Surface Empowered Wireless Communications: Challenges and Opportunities. IEEE Wirel. Comm. 2021, 28, 136–143. [Google Scholar] [CrossRef]
- Cho, H.; Choi, J. Alternating Beamforming With Intelligent Reflecting Surface Element Allocation. IEEE Wirel. Comm. Lett. 2021, 10, 1232–1236. [Google Scholar] [CrossRef]
- Pan, G.; Ye, J.; Alouini, M.S. Full-duplex enabled intellignent reflecting surface systems: Opportunities and challenges. IEEE Wirel. Comm. 2021, 122–129. [Google Scholar] [CrossRef]
- Abdullah, Z.; Chen, G.; Lambotharan, S.; Chambers, J.A. Optimization of Intelligent Reflecting Surface Assisted Full-Duplex Relay Networks. IEEE Wirel. Comm. Lett. 2021, 10, 363–367. [Google Scholar] [CrossRef]
- Abdullah, Z.; Chen, G.; Lambotharan, S.; Chambers, J.A. A Hybrid Relay and Intelligent Reflecting Surface Network and Its Ergodic Perforamance Analysis. IEEE Wirel. Comm. Lett. 2020, 9, 1653–1657. [Google Scholar] [CrossRef]
- Bjornson, E.; Ozdogan, O.; Larsson, E.G. Intelligent Reflecting Surface Versus Decode-and-Forward: How Large Surfaces Are Needed to Beat Relaying? IEEE Wirel. Comm. Lett. 2020, 9, 244–248. [Google Scholar] [CrossRef]
- Sharma, P.K.; Garg, P. Intelligent Reflecting Surfaces to Achieve the Full-Duplex Wireless Communication. IEEE Commun. Lett. 2021, 25, 622–626. [Google Scholar] [CrossRef]
- Shaikh, M.H.N.; Bohara, V.A.; Srivastava, A.; Ghatak, G. Intelligent Reflecting Surfaces Versus Full-Duplex Relaying: Perforamnce Comparison for Non-Ideal Transmitter Case. In Proceedings of the PIMRC 2021—2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Communications, Helsinki, Finland, 13–16 September 2021. [Google Scholar]
- Shafique, T.; Tabassum, H.; Hossain, E. Optimization of Wireless Relaying With Flexible UAV-Bourn Reflecting Surfaces. IEEE Trans. Commun. 2021, 69, 309–325. [Google Scholar] [CrossRef]
- Zhou, Z.; Ge, N.; Wang, Z.; Hanzo, L. Joint Transmit Precoding and Reconfigurable Intelligent Surface Phase Adjustment: A Decomposition-Aided Channel Estimation Approach. IEEE Trans. Commun. 2021, 69, 1228–1243. [Google Scholar] [CrossRef]
- Zhao, M.; Wu, Q.; Zhao, M.J.; Zhang, R. Intelligent Reflecting Surface Enhanced Wireless Networks: Two-Timescale Beamforming Optimization. IEEE Trans. Wirel. Commun. 2021, 20, 2–17. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Yuan, X.; Chen, Z.; Li, H. Intelligent Reflecting Surface-Assisted Millimeter Wave Communications: Joint Active and Passive Precoding Design. IEEE Trans. Vehic. Techno. 2020, 69, 14960–14973. [Google Scholar] [CrossRef]
- Tao, Q.; Zhang, S.; Zhong, C.; Zhang, R. Intelligent Reflecting Surface Aided Multicasting With Random Passive Beamforming. IEEE Wirel. Commun. Lett. 2021, 10, 92–96. [Google Scholar] [CrossRef]
- Zhou, G.; Pan, C.; Ren, H.; Wang, K.; Nallanathan, A. Intelligent Reflecting Surface Aided Multigroup Multicast MISO Communication Systems. IEEE Trans. Signal Process. 2020, 68, 3236–3251. [Google Scholar] [CrossRef]
- Li, Y.; Kudathanthirige, D.; Amarasuriya, G. Intelligent Reflecting Surface Aided Multi-Way Communications. In Proceedings of the PIMRC 2021—2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Communications, Helsinki, Finland, 13–16 September 2021. [Google Scholar]
- Cheng, Y.; Liu, K.H.; Teh, K.C. Outage Perforamance of Downlink IRS-Assisted NOMA Systems. In Proceedings of the Globecom 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020. [Google Scholar]
- Cheng, Y.; Li, K.H.; Liu, Y.; Teh, K.C. Downlink and Uplink Intelligent Reflecting Surface Aided Networks: NOMA and OMA. IEEE Trans. Wirel. Commun. 2021, 20, 3988–4000. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, K.H.; Liu, Y.; Teh, K.C.; Karagiannidis, G.K. Non-Orthogonal Multiple Access (NOMA) with Multiple Intelligent Reflecting Surfaces. IEEE Trans. Wirel. Commun. 2021, 20, 7184–7195. [Google Scholar] [CrossRef]
- Lyu, J.; Zhang, R. Spatial Throughput Characterization for Intelligent Reflecting Surface Aided Multiuser System. IEEE Wirel. Commun. Lett. 2021, 9, 834–838. [Google Scholar] [CrossRef]
- Fascista, A.; Keskin, M.F.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. RIS-aided Joint Localization and Synchronization with a Single-Antenna Receiver: Beamforming Design and Low-Complexity Estimation. IEEE J. Sel. Top. Signal Process. To appear. [CrossRef]
- Najafi, M.; Jamali, V.; Schober, R.; Poor, H.V. Physics-Based Modelin and Scalable Optimization of Large Intelligent Reflecting Surfaces. IEEE Trans. Commun. 2021, 69, 2673–2691. [Google Scholar] [CrossRef]
- Kwon, K.; Hwang, D.; Nam, S. Beamformer Design for Self-Energy Recycling in Full-Duplex Decode-and-Forward Relay Systems. IEEE Wirel. Commun. Lett. 2020, 9, 1417–1421. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, D.; Yang, J.; Nam, S.-S.; Song, H.-K. Full Duplex Relaying with Intelligent Reflecting Surface: Joint Beamforming and Phase Adjustment. Mathematics 2022, 10, 3075. https://doi.org/10.3390/math10173075
Hwang D, Yang J, Nam S-S, Song H-K. Full Duplex Relaying with Intelligent Reflecting Surface: Joint Beamforming and Phase Adjustment. Mathematics. 2022; 10(17):3075. https://doi.org/10.3390/math10173075
Chicago/Turabian StyleHwang, Duckdong, Janghoon Yang, Sung-Sik Nam, and Hyoung-Kyu Song. 2022. "Full Duplex Relaying with Intelligent Reflecting Surface: Joint Beamforming and Phase Adjustment" Mathematics 10, no. 17: 3075. https://doi.org/10.3390/math10173075
APA StyleHwang, D., Yang, J., Nam, S.-S., & Song, H.-K. (2022). Full Duplex Relaying with Intelligent Reflecting Surface: Joint Beamforming and Phase Adjustment. Mathematics, 10(17), 3075. https://doi.org/10.3390/math10173075