
Multiphase Electric Motor Drive with Improved and Reliable Performance: Combined Star-Pentagon Synchronous Reluctance Motor Fed from Matrix Converter



Abstract
:1. Introduction
2. Dynamic Modeling of the Combined Star-Pentagon Five-Phase SynRM
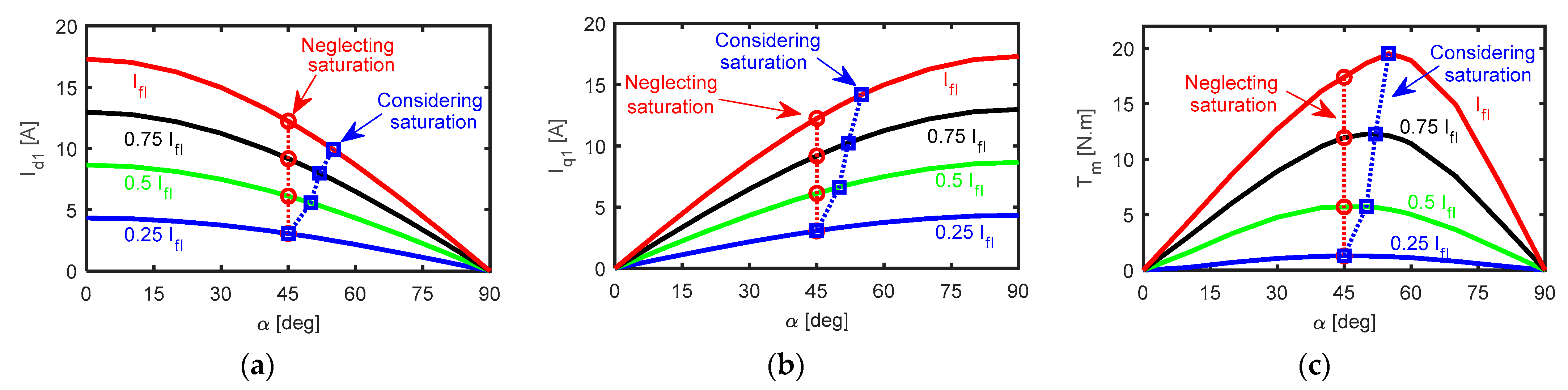
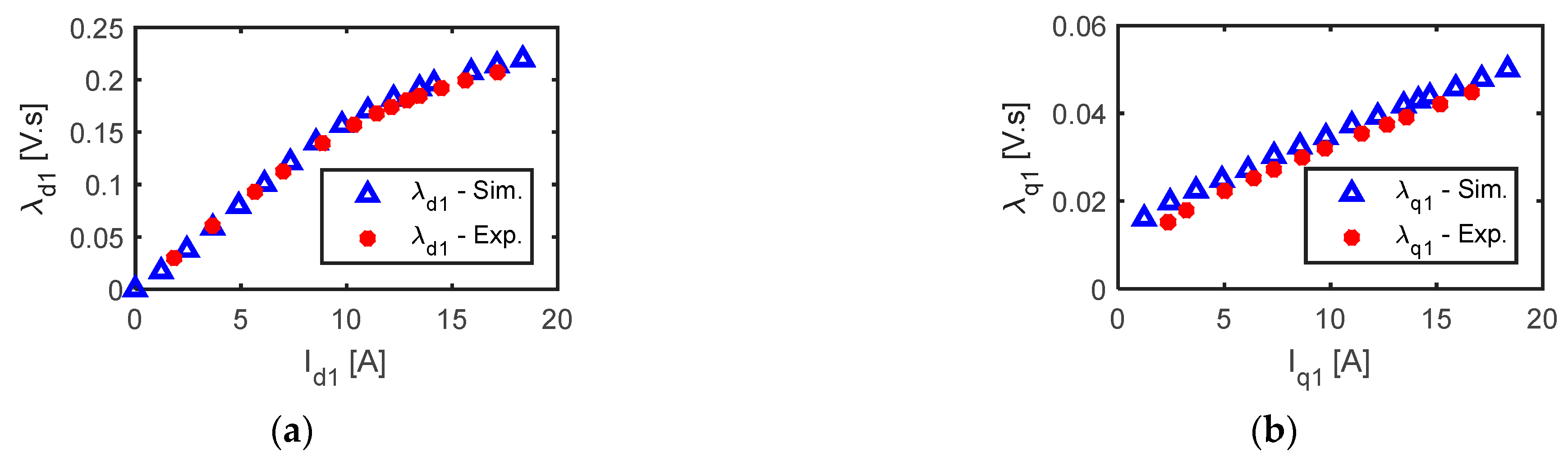
2.1. Effect of Saturation and Cross Saturation on SynRM Flux-Linkages (λd1 and λq1)
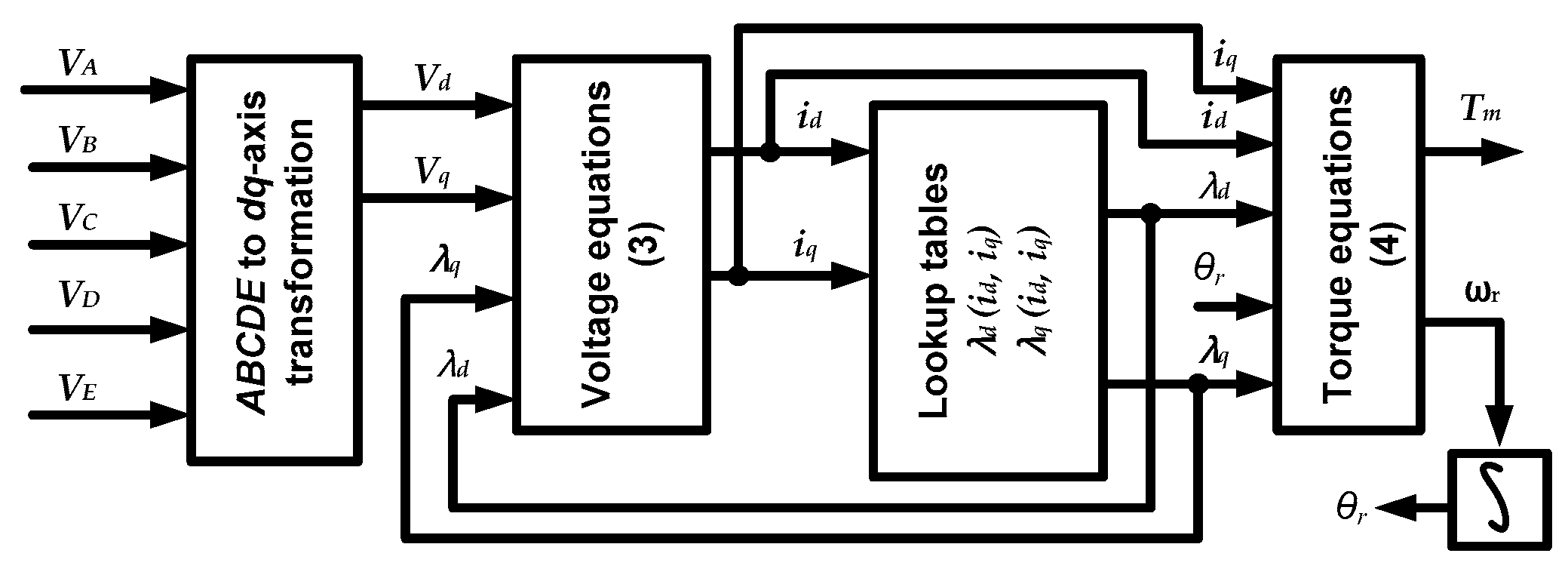
2.2. Modelling Equations of Five-Phase SynRM
3. Five-Phase Indirect Matrix Converter
3.1. Three-Phase Controlled Rectifier Stage
3.2. Five-Phase Inverter Stage
3.3. Synchronization between Rectifier and Inverter
4. Performance Analysis of the Drive System
4.1. Simulation Results
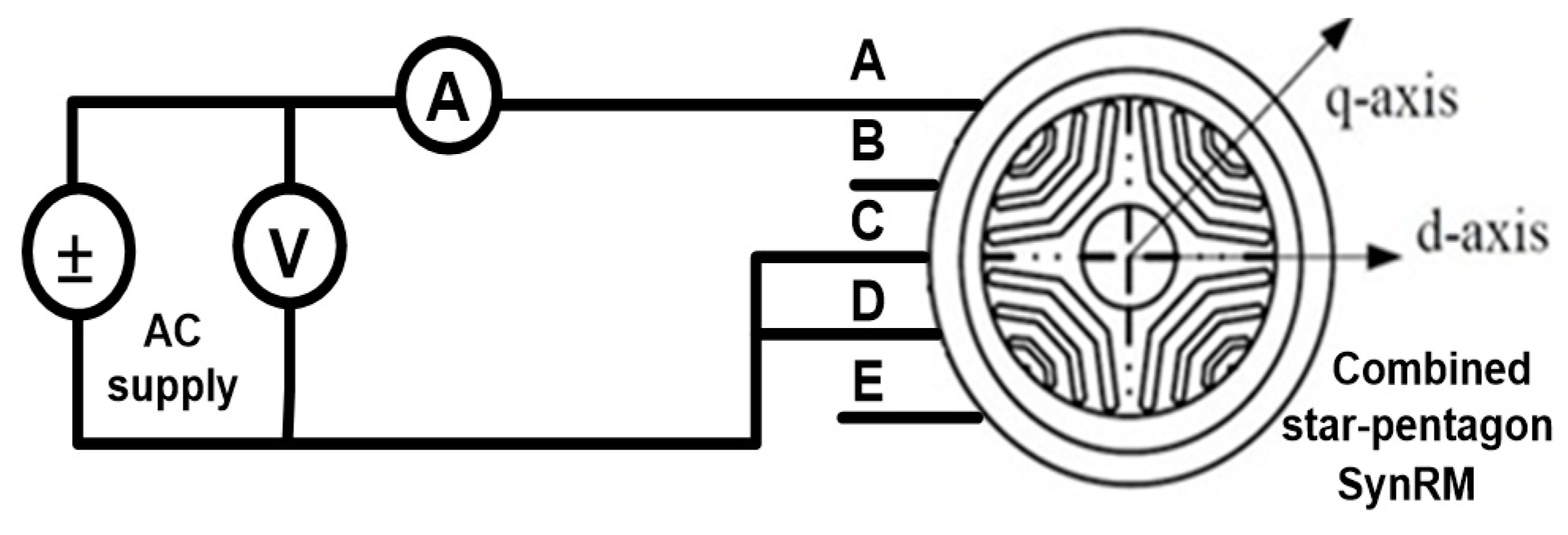
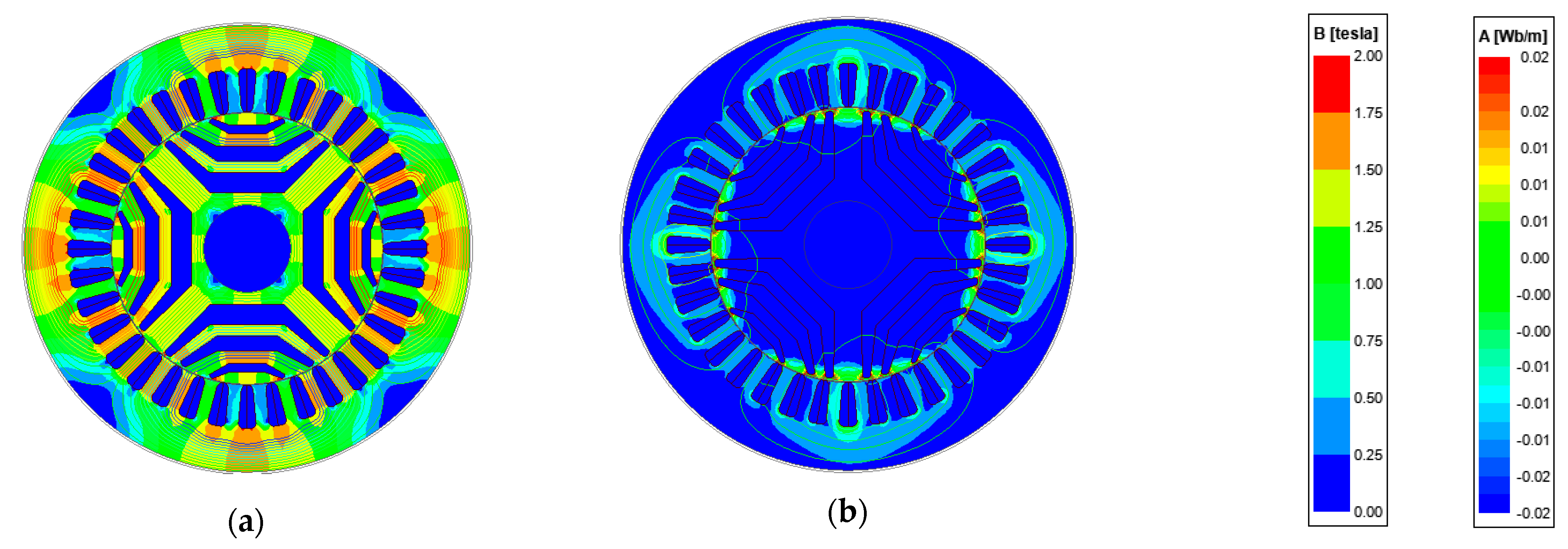
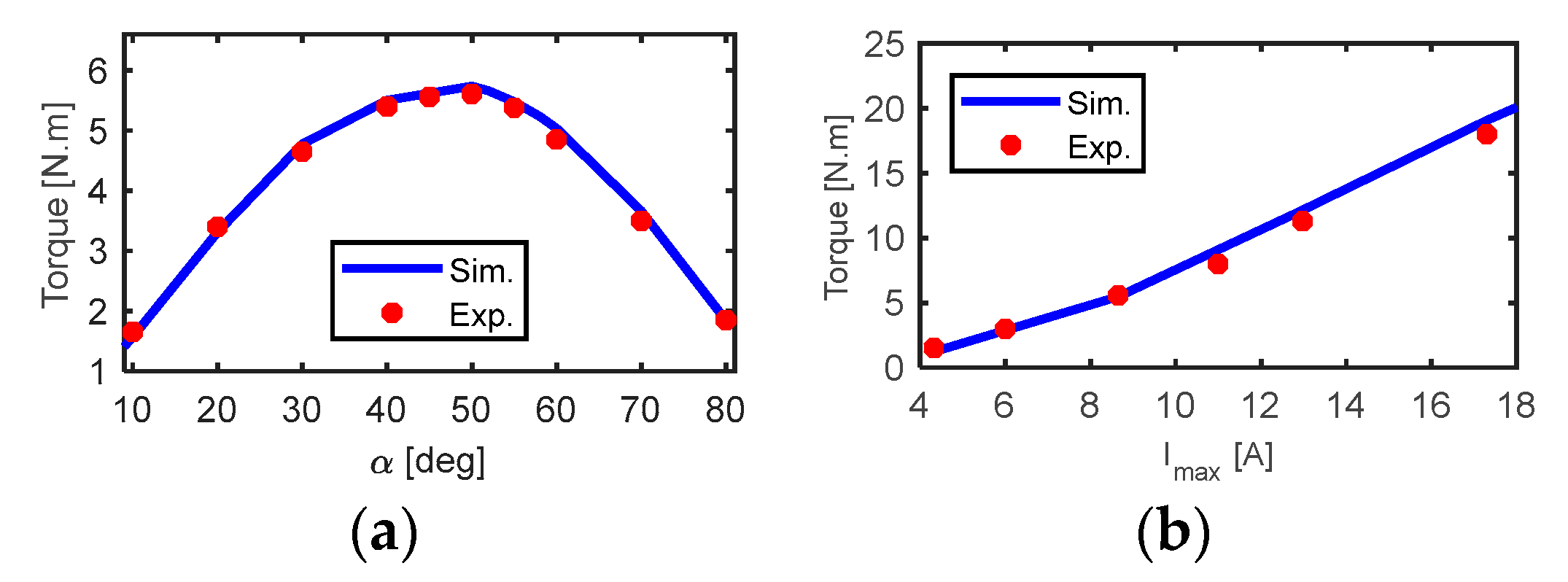
4.2. Experimental Validation of the FEM Model
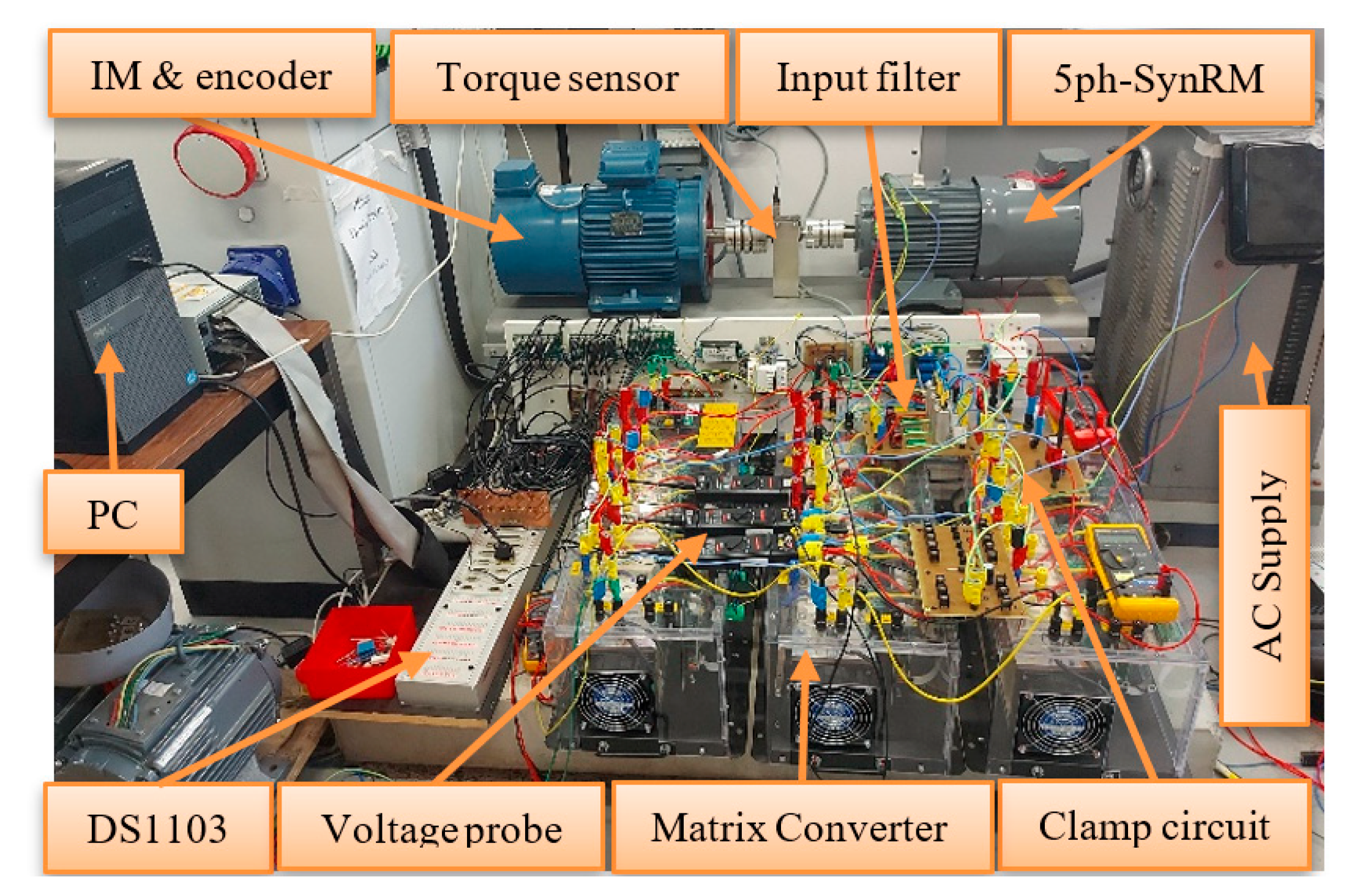
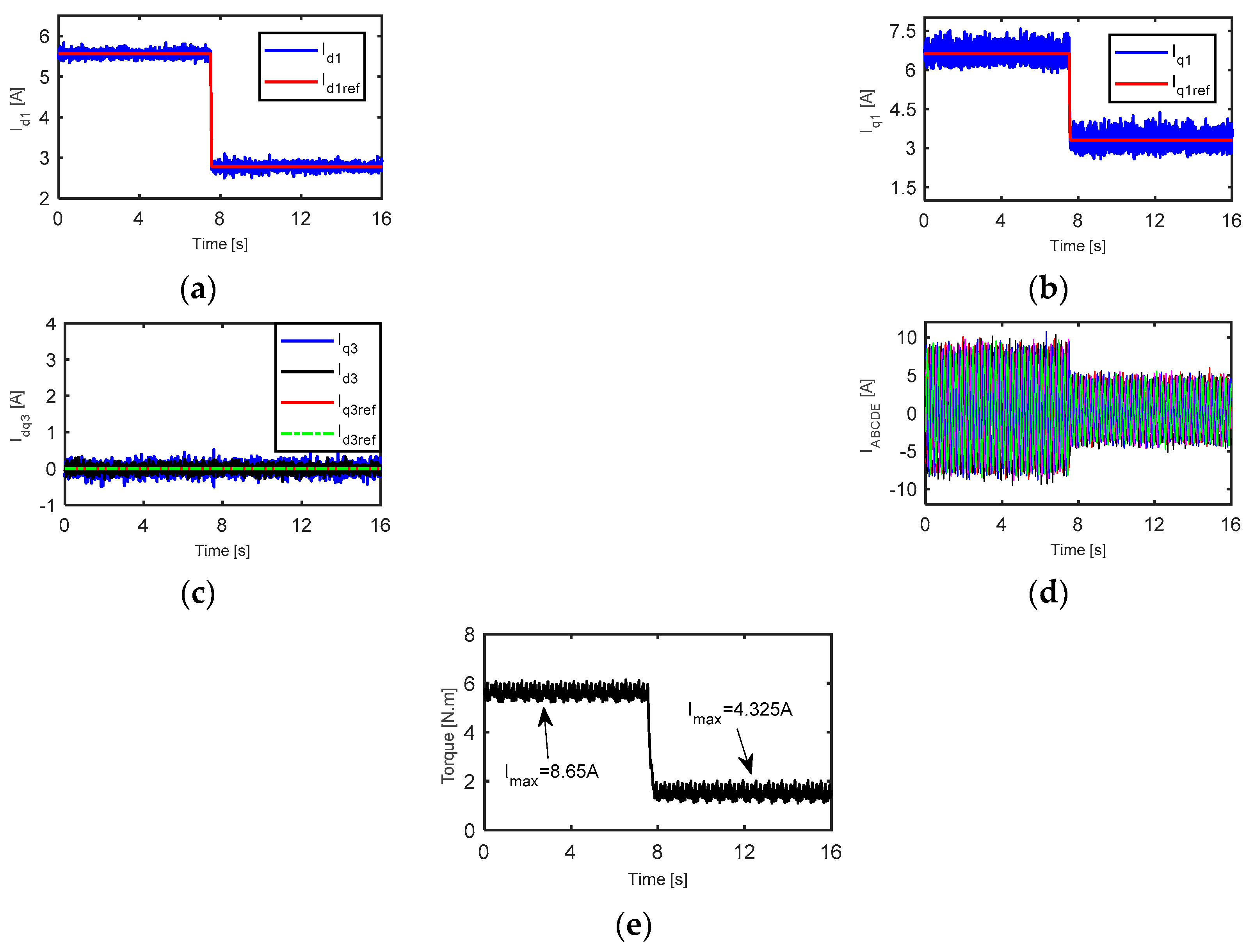
4.3. Experimental Results
5. Analysis of Reliability, Cost, and Performance
5.1. Cost Aanalysis of the Drive Systems
5.2. Reliability Analysis of the Drive Systems
5.3. Performance Comparison of the Drive Systems
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tian, B.; Molinas, M.; An, Q.; Zhou, B.; Wei, J. Freewheeling Current-Based Sensorless Field-Oriented Control of Five-Phase Permanent Magnet Synchronous Motors under Insulated Gate Bipolar Transistor Failures of a Single Phase. IEEE Trans. Ind. Electron. 2022, 69, 213–224. [Google Scholar] [CrossRef]
- Sadeghi, S.; Parsa, L. Multiobjective Design Optimization of Five-Phase Permanent-Magnet Machine. IEEE Trans. Magn. 2011, 47, 1658–1666. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Sen, B.; Griffo, A.; Sun, Z.; Chong, E. A Fault-Tolerant Machine Drive Based on Permanent Magnet-Assisted Synchronous Reluctance Machine. IEEE Trans. Ind. Appl. 2018, 54, 1349–1359. [Google Scholar] [CrossRef]
- Ward, E.E.; Harer, H. Preliminary investigation of an inverter-fed 5-phase induction motor. Electr. Eng. Proc. Inst. 1969, 116, 980–984. [Google Scholar] [CrossRef]
- Levi, E. Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Xu, L.; Lipo, T.A. A Five Phase Reluctance Motor with High Specific Torque. IEEE Trans. Ind. Appl. 1992, 28, 659–667. [Google Scholar] [CrossRef]
- Williamson, S.; Smith, S. Pulsating torques and losses in multiphase induction machines. IEEE Trans. Ind. Appl. 2003, 39, 986–993. [Google Scholar] [CrossRef]
- Hu, J.S.; Chen, K.Y.; Shen, T.Y.; Tang, C.H. Analytical solutions of multilevel space-vector PWM for multiphase voltage source inverters. IEEE Trans. Power Electron. 2011, 26, 1489–1502. [Google Scholar] [CrossRef]
- Amin, A.; Tawfiq, K.B.; Youssef, H.; El-Kholy, E.E. Performance analysis of inverter fed from wind energy system. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; pp. 512–516. [Google Scholar]
- Scuiller, F.; Charpentier, J.; Semail, E. Multi-star multi-phase winding for a high-power naval propulsion machine with low ripple torques and high fault tolerant ability. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC’10), Lille, France, 1–3 September 2010; pp. 26–29. [Google Scholar]
- Iqbal, A.; Ahmed, S.M.; Abu-Rub, H. Space Vector PWM Technique for a Three-to-Five-Phase Matrix Converter. IEEE Trans. Ind. Appl. 2012, 48, 697–707. [Google Scholar] [CrossRef]
- Kavitha, P.; umamaheswari, B. Bus synchronized matrix converter fed switched reluctance machine in motoring and generating modes of operation. Int. J. Soft Comput. 2014, 9, 391–400. [Google Scholar]
- Tawfiq, K.B. Performance Improvement of Existing Three Phase Synchronous Reluctance Machine: Stator Upgrading to 5-Phase with Combined Star-Pentagon Winding. IEEE Access 2020, 8, 143569–143583. [Google Scholar] [CrossRef]
- Park, J.-K.; Babetto, C.; Berardi, G.; Hur, J.; Bianchi, N. Comparison of Fault Characteristics According to Winding Configurations for Dual Three-Phase Synchronous Reluctance Motor. IEEE Trans. Ind. Appl. 2021, 57, 2398–2406. [Google Scholar] [CrossRef]
- Cupertino, F.; Pellegrino, G.; Gerada, C. Design of Synchronous Reluctance Motors with Multiobjective Optimization Algorithms. IEEE Trans. Ind. Appl. 2014, 50, 3617–3627. [Google Scholar] [CrossRef]
- Credo, A.; Villani, M.; Popescu, M.; Riviere, N. Application of Epoxy Resin in Synchronous Reluctance Motors with Fluid-Shaped Barriers for E-Mobility. IEEE Trans. Ind. Appl. 2021, 57, 6440–6452. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Elgenedy, M.A.; Ahmed, S.; Massoud, A.M. An Improved Fault-Tolerant Five-Phase Induction Machine Using a Combined Star/Pentagon Single Layer Stator Winding Connection. IEEE Trans. Ind. Electron. 2016, 63, 618–628. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; EL-Kholy, E.E.; Sergeant, P. Construction of Synchronous Reluctance Machines with Combined Star-Pentagon Configuration Using Standard Three-Phase Stator Frames. IEEE Trans. Ind. Electron. 2022, 69, 7582–7595. [Google Scholar] [CrossRef]
- Raziee, S.M.; Misir, O.; Ponick, B. Multiple Multiphase Combined Star–Polygon Winding Analysis. IEEE Trans. Ind. Electron. 2019, 66, 7468–7479. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Sadeghi, S.; Parsa, L. A Generalized Fault-Tolerant Control Strategy for Five-Phase PM Motor Drives Considering Star, Pentagon, and Pentacle Connections of Stator Windings. IEEE Trans. Ind. Electron. 2014, 61, 63–75. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Ahmed, S.; Massoud, A.M. Dynamic Modeling of a Five-Phase Induction Machine with a Combined Star/Pentagon Stator Winding Connection. IEEE Trans. Energy Convers. 2016, 31, 1645–1656. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; El-Kholy, E.E.; Sergeant, P. Refurbishing three-phase synchronous reluctance machines to multiphase machines. Electr. Eng. 2020, 103, 139–152. [Google Scholar] [CrossRef]
- Yamamoto, S.; Ara, T.; Matsuse, K. A Method to Calculate Transient Characteristics of Synchronous Reluctance Motors Considering Iron Loss and Cross-Magnetic Saturation. IEEE Trans. Ind. Appl. 2007, 43, 47–56. [Google Scholar] [CrossRef]
- Ferrari, M.; Bianchi, N.; Fornasiero, E. Analysis of Rotor Saturation in Synchronous Reluctance and PM-Assisted Reluctance Motors. IEEE Trans. Ind. Appl. 2015, 51, 169–177. [Google Scholar] [CrossRef]
- Levi, E. Saturation modelling in d-q axis models of salient pole synchronous machines. Trans. Energy Convers. 1999, 14, 44–50. [Google Scholar] [CrossRef]
- Lubin, T.; Razik, H.; Rezzoug, A. Magnetic saturation effects on the control of a synchronous reluctance machine. IEEE Trans. Energy Convers. 2002, 17, 356–362. [Google Scholar] [CrossRef]
- Vagati, A.; Pastorelli, M.; Scapino, F.; Franceschini, G. Impact of cross saturation in synchronous reluctance motors of the transverse-laminated type. IEEE Trans. Ind. Electron. 2000, 36, 1039–1046. [Google Scholar] [CrossRef]
- Quéval, L.; Ohsaki, H. Nonlinear abc-Model for Electrical Machines Using N-D Lookup Tables. IEEE Trans. Energy Convers. 2015, 30, 316–322. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. An Enhanced Fault-Tolerant Control of a Five-Phase Synchronous Reluctance Motor Fed from a Three-to-Five-Phase Matrix Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 4182–4194. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. Power Loss Analysis of a Five-Phase Drive System Using a Synchronous Reluctance Motor and an Indirect Matrix Converter with Reduced Switching Losses. Machines 2022, 10, 738. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; Rezk, H.; El-Kholy, E.E.; Sergeant, P. Mathematical Modelling, Analysis and Control of a Three to Five-Phase Matrix Converter for Minimal Switching Losses. Mathematics 2021, 9, 96. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; Su, M.; Sun, Y.; Li, X.; Zhang, G. Control method for the two-stage matrix converter to enhance the linear voltage transfer ratio. IET Power Electron. 2018, 11, 2295–2301. [Google Scholar] [CrossRef]
- Ramalho, A.; Vitorino, M.A.; Correa, M.; Costa, L.A.C.; Braga-Filho, E. New Family of Two-to-Three-Phase AC-AC Indirect Matrix Converters with Open-end Rectifier Stage. IEEE Trans. Ind. Appl. 2021, 58, 517–530. [Google Scholar] [CrossRef]
- Dabour, S.M.; Hassan, A.E.; Rashad, E. Analysis and implementation of space vector modulated five-phase matrix converter. Int. J. Electron. Power Energy Syst. 2014, 63, 740–746. [Google Scholar] [CrossRef]
- Rashad, E.M.; Radwan, T.S.; Rahman, M.A. A maximum torque per ampere vector control strategy for synchronous reluctance motors considering saturation and iron losses. In Proceedings of the 39th IAS Annual Meeting Conference Record of the 2004 IEEE Industry Applications Conference, Seattle, WA, USA, 3–7 October 2004; Volume 4, pp. 2411–2417. [Google Scholar]
- Hwang, S.-H.; Kom, J.-M.; Khang, H.V.; Ahn, J.-W. Parameter identification of a synchronous reluctance motor by using asynchronous PI current regulator at a standstill. J. Power Electron. 2010, 10, 491–497. [Google Scholar] [CrossRef]
- Available online: https://be.farnell.com/ (accessed on 1 April 2021).
- Domingues-Olavarría, G.; Márquez-Fernández, F.J.; Fyhr, P.; Reinap, A.; Andersson, M.; Alaküla, M. Optimization of Electric Powertrains Based on Scalable Cost and Performance Models. IEEE Trans. Ind. Appl. 2019, 55, 751–764. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Choi, S.; Baek, J. Comparisons of three-phase and five-phase permanent magnet assisted synchronous reluctance motors. IET Electron. Power Appl. 2016, 10, 347–355. [Google Scholar] [CrossRef]
- Yang, S.; Xiang, D.; Bryant, A.; Mawby, P.; Ran, L.; Tavner, P. Condition Monitoring for Device Reliability in Power Electronic Converters: A Review. IEEE Trans. Power Electron. 2010, 25, 2734–2752. [Google Scholar] [CrossRef]
- Wolfgang, E. Examples for Failures in Power Electronics Systems; ECPE Tutorial on Reliability of Power Electronic Systems: Nuremberg, Germany, 2007. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Stator bore diameter (D1O) | 110 mm | Air gap length (Lg) | 0.3 mm |
| Stator inner diameter (D) | 180 mm | Number of slots (S) | 36 |
| Rotor outer diameter (Dro) | 109.4 mm | Pole pairs (P) | 2 |
| Rotor inner diameter (Dri) | 35 mm | Rated frequency (F) | 100 Hz |
| Axial length (L) | 140 mm | Rated power (Pr) | 5.5 kW |
| Number of turns of star coil per phase | 24 | Number of turns of pentagon coil per phase | 29 |
| Stator/Rotor steel | M270-50A/M330-50A | Rated current (Is) | 12.3 A |
| Rotor flux barriers per pole (Nfb) | 3 | Number of phases (m) | 5 |
| ) | 0.25 | ) | 0.125 |
| Parameters | Drive-1 | Drive-2 | |
|---|---|---|---|
| Cost | Copper cost (pu) | 1 | 1.029 |
| Winding cost (pu) | 1 | 1.2 | |
| Punching, cutting and iron cost (pu) | 1 | 1 | |
| Machine cost (pu) | 1 | 1.04 | |
| Diode bridge cost (pu) | 1 | 0 | |
| Number of switches | 6 | 22 | |
| Switches I- rating (pu) | 1 | 1 | |
| Switches V- rating (pu) | 1 | 0.6 | |
| Switches cost (pu) | 1 | 1.941 | |
| DC-link capacitor cost (pu) | 1 | 0 | |
| Converter cost (pu) | 1 | 0.637 | |
| Total initial cost (pu) | 1 | 1.0219 | |
| Performance | MMF Magnitude (pu) | 1 | 1.0729 |
| MMF THD (pu) | 1 | 0.8010 | |
| Winding factor (pu) | 1 | 1.0321 | |
| Average torque (pu) | 1 | 1.1335 | |
| Torque ripple (pu) | 1 | 0.6952 | |
| Power factor | 1 | 1.0228 | |
| Power flow direction | Uni. | Bi. | |
| Efficiency (pu) | 1 | 1.0058 | |
| Reliability | Average torque at one phase open (pu) | 1 | 2.08 |
| Torque ripple at one phase open (pu) | 1 | 0.189 | |
| Starting with one/two phase open | No | Yes | |
| ) | 59% | 41% | |
| Reliability | + | +++ | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. Multiphase Electric Motor Drive with Improved and Reliable Performance: Combined Star-Pentagon Synchronous Reluctance Motor Fed from Matrix Converter. Mathematics 2022, 10, 3351. https://doi.org/10.3390/math10183351
Tawfiq KB, Ibrahim MN, Sergeant P. Multiphase Electric Motor Drive with Improved and Reliable Performance: Combined Star-Pentagon Synchronous Reluctance Motor Fed from Matrix Converter. Mathematics. 2022; 10(18):3351. https://doi.org/10.3390/math10183351
Chicago/Turabian StyleTawfiq, Kotb B., Mohamed N. Ibrahim, and Peter Sergeant. 2022. "Multiphase Electric Motor Drive with Improved and Reliable Performance: Combined Star-Pentagon Synchronous Reluctance Motor Fed from Matrix Converter" Mathematics 10, no. 18: 3351. https://doi.org/10.3390/math10183351
APA StyleTawfiq, K. B., Ibrahim, M. N., & Sergeant, P. (2022). Multiphase Electric Motor Drive with Improved and Reliable Performance: Combined Star-Pentagon Synchronous Reluctance Motor Fed from Matrix Converter. Mathematics, 10(18), 3351. https://doi.org/10.3390/math10183351