
Prediction and Compensation Model of Longitudinal and Lateral Deck Motion for Automatic Landing Guidance System

Abstract
:1. Introduction
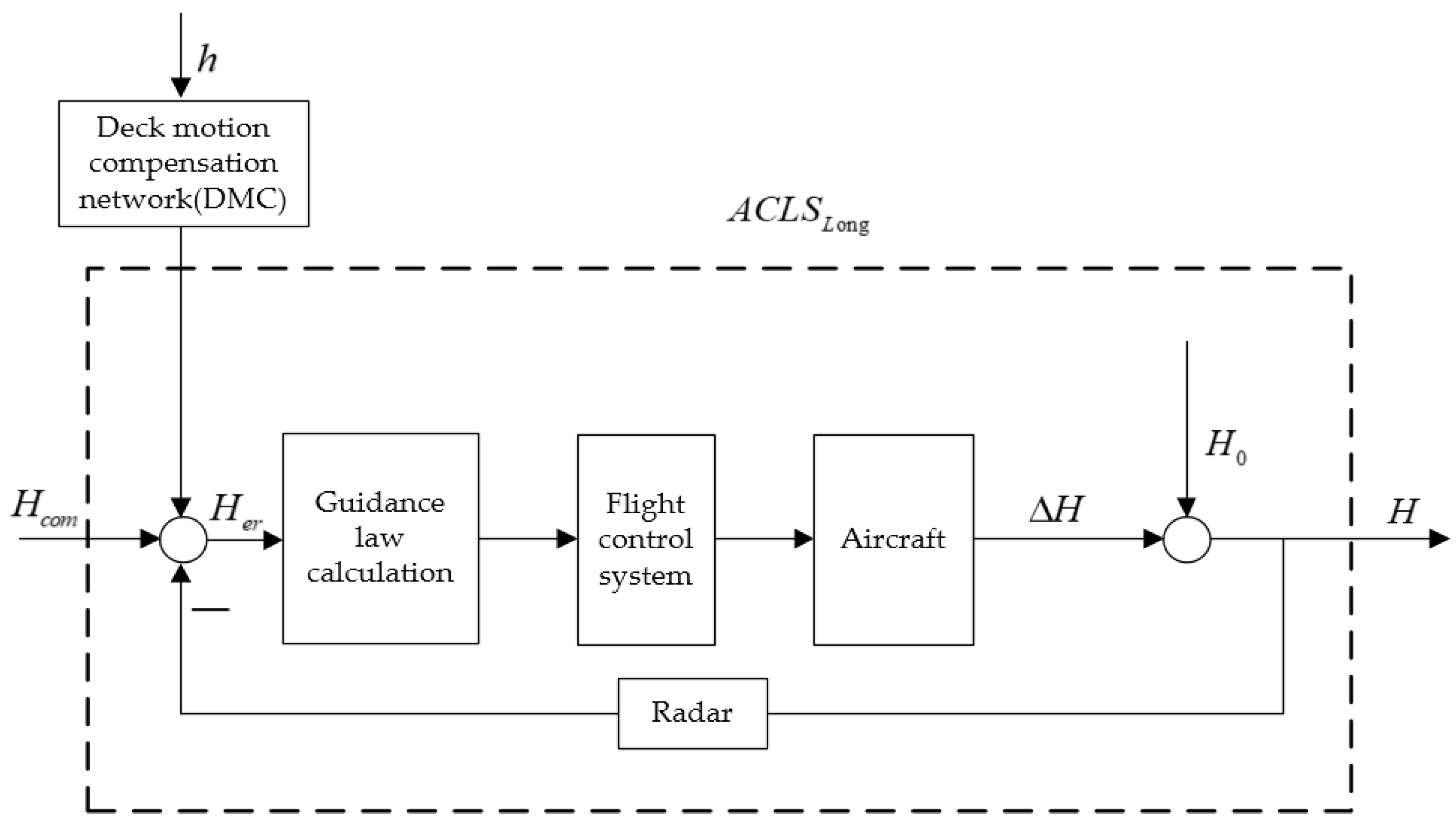
2. Overall Framework of the Prediction and Compensation Strategy of the Longitudinal Motion on Deck
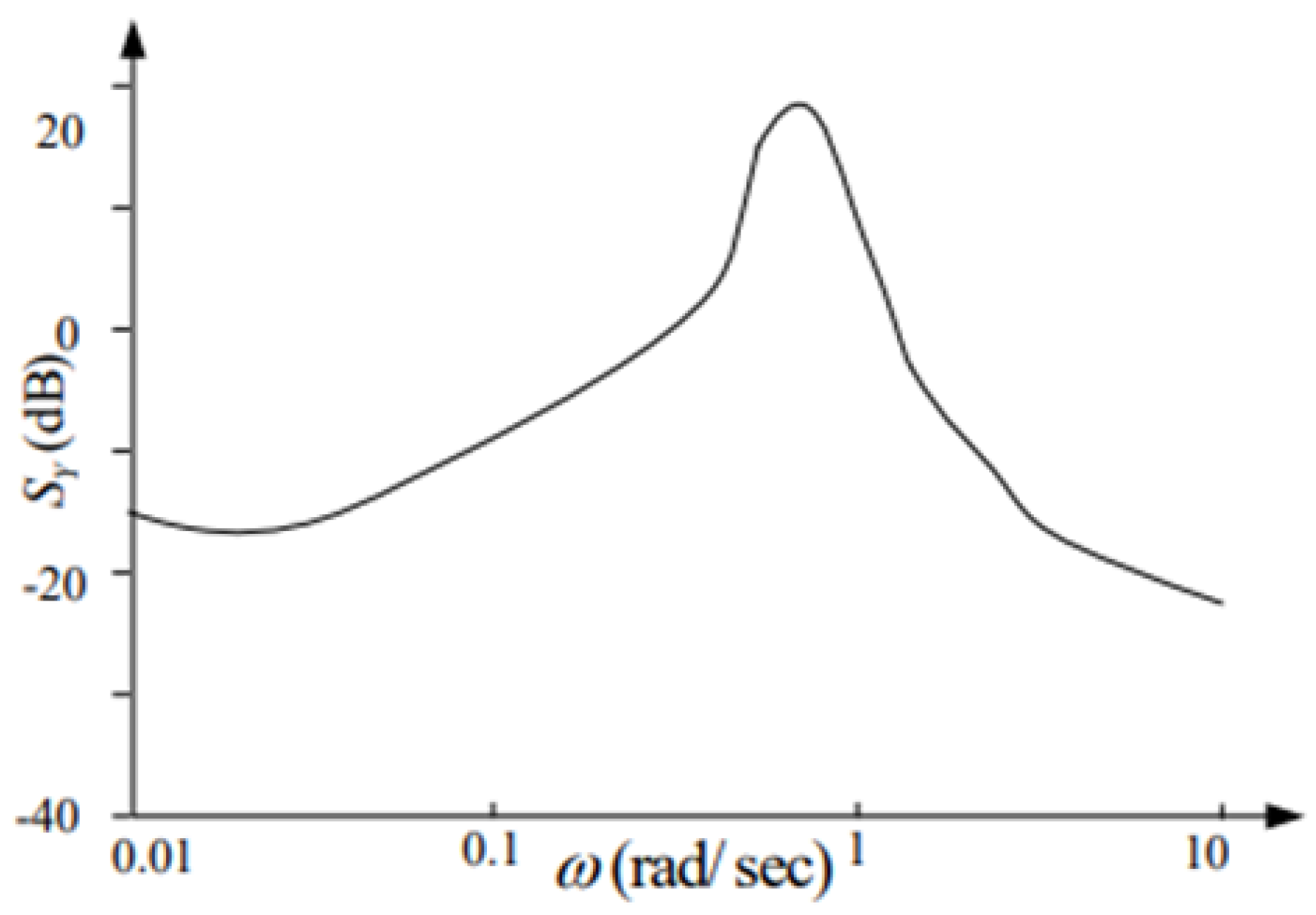
2.1. Research on Prediction Technology of Deck Motion
2.2. Research on Deck Motion Prediction
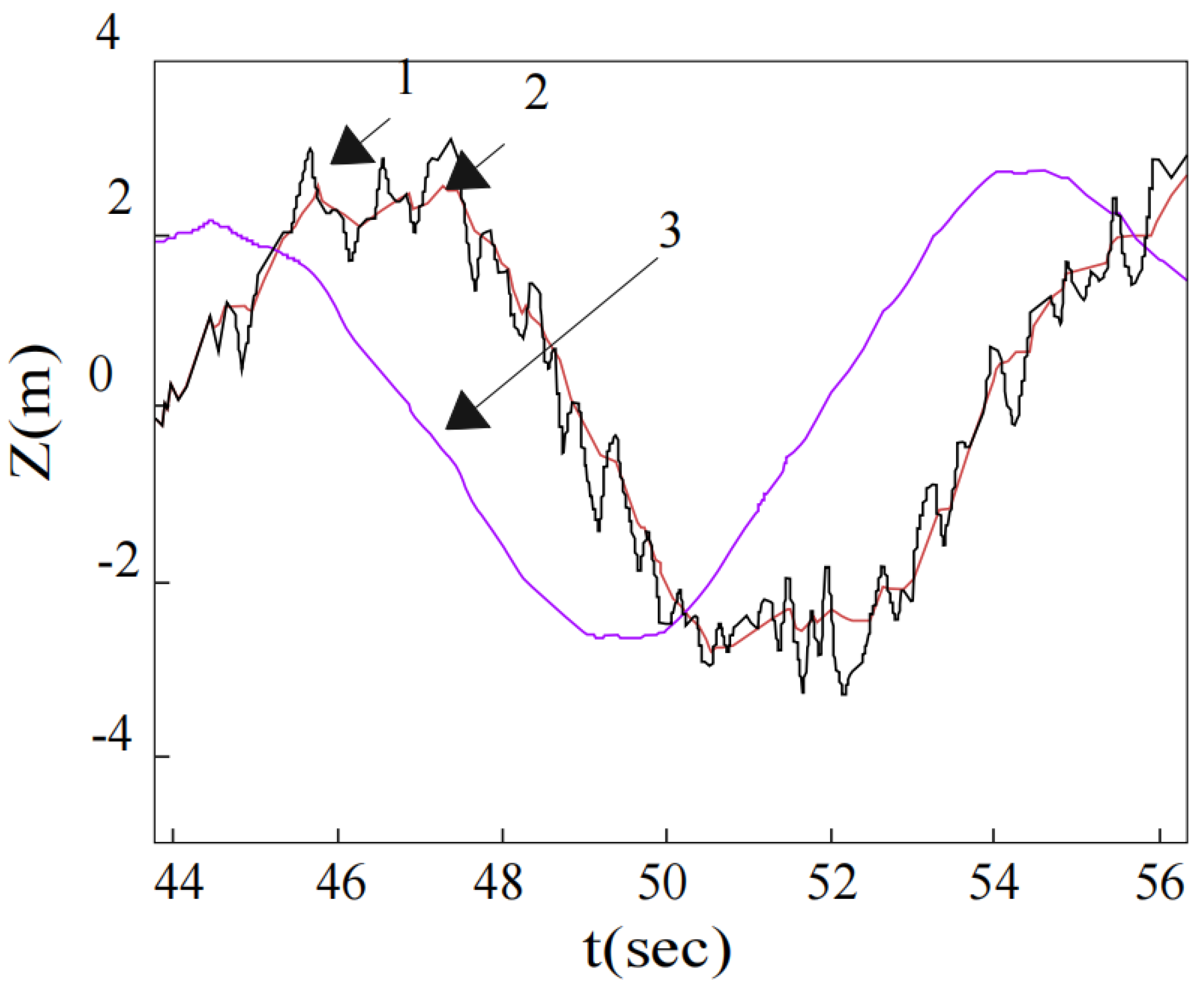
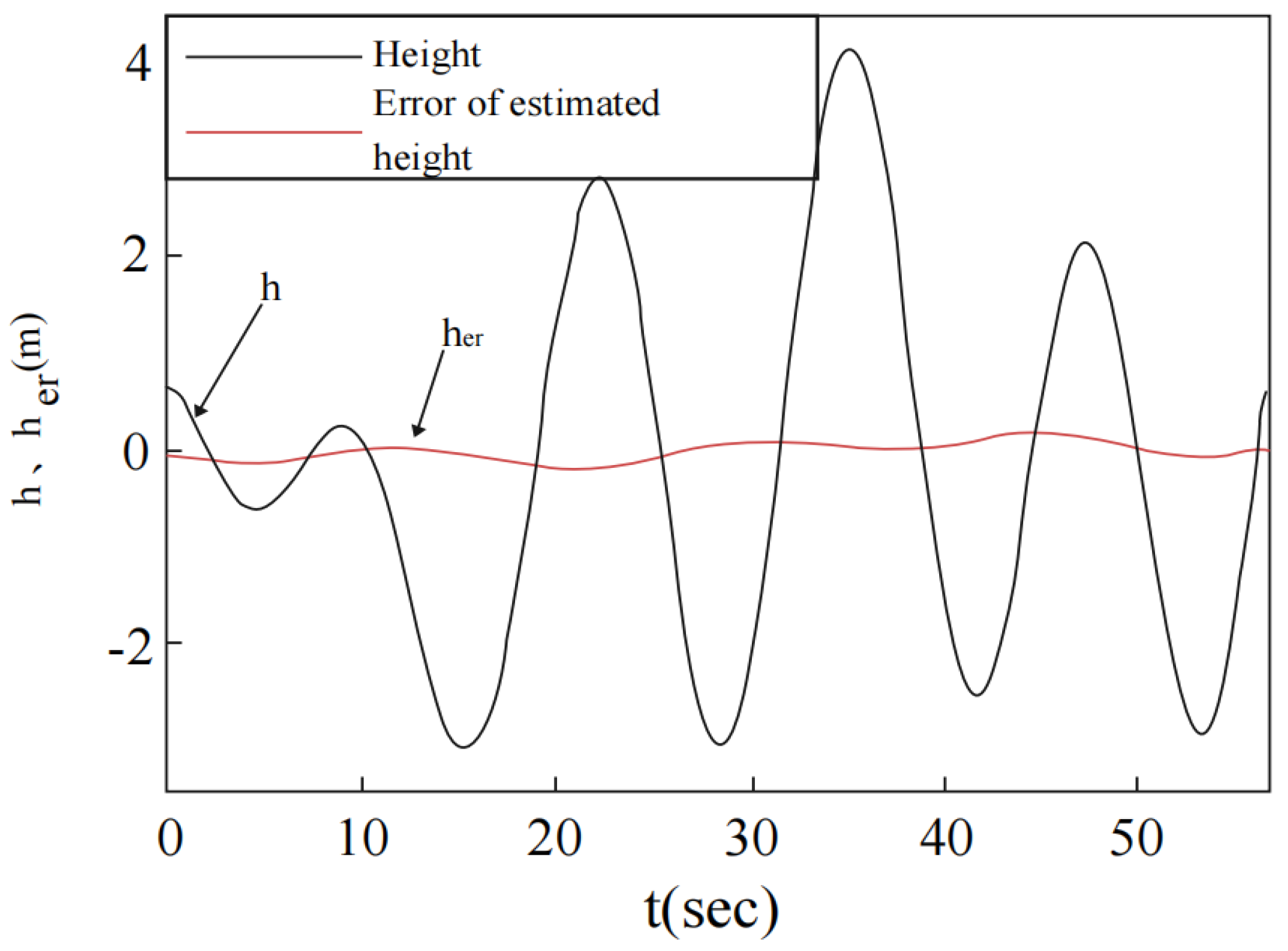
2.2.1. Design of the Predictor Based on Particle Filter Theory
- (1)
- Discrete system equation sets are used to calculate the optimal filtering value of the system (including deck motion displacement and deck motion speed ) at moment. The specific calculation process is shown as follows:
- (a)
- The particle swarm is generated by prior probability , and the weights of all the particles are ;
- (b)
- at moment, weights of particles are updated and normalized, the least mean square estimation of unknown parameters at can be obtained;
- (c)
- obtain new particle swarm by resampling;
- (d)
- unknown parameters are predicted by system state equations;
- (e)
- , turn to step 2.
- (2)
- The expression of the optimal estimation value of the displacement information of the up and down motion at the future moment :
2.2.2. Predictor Design Based on Time Series AR Model
- (1)
- General form of AR model sequence:
- (2)
- The prediction model of AR model sequence:
- (3)
- Determination of sequence order of AR model:
- (4)
- Parameters prediction of AR model:
- (5)
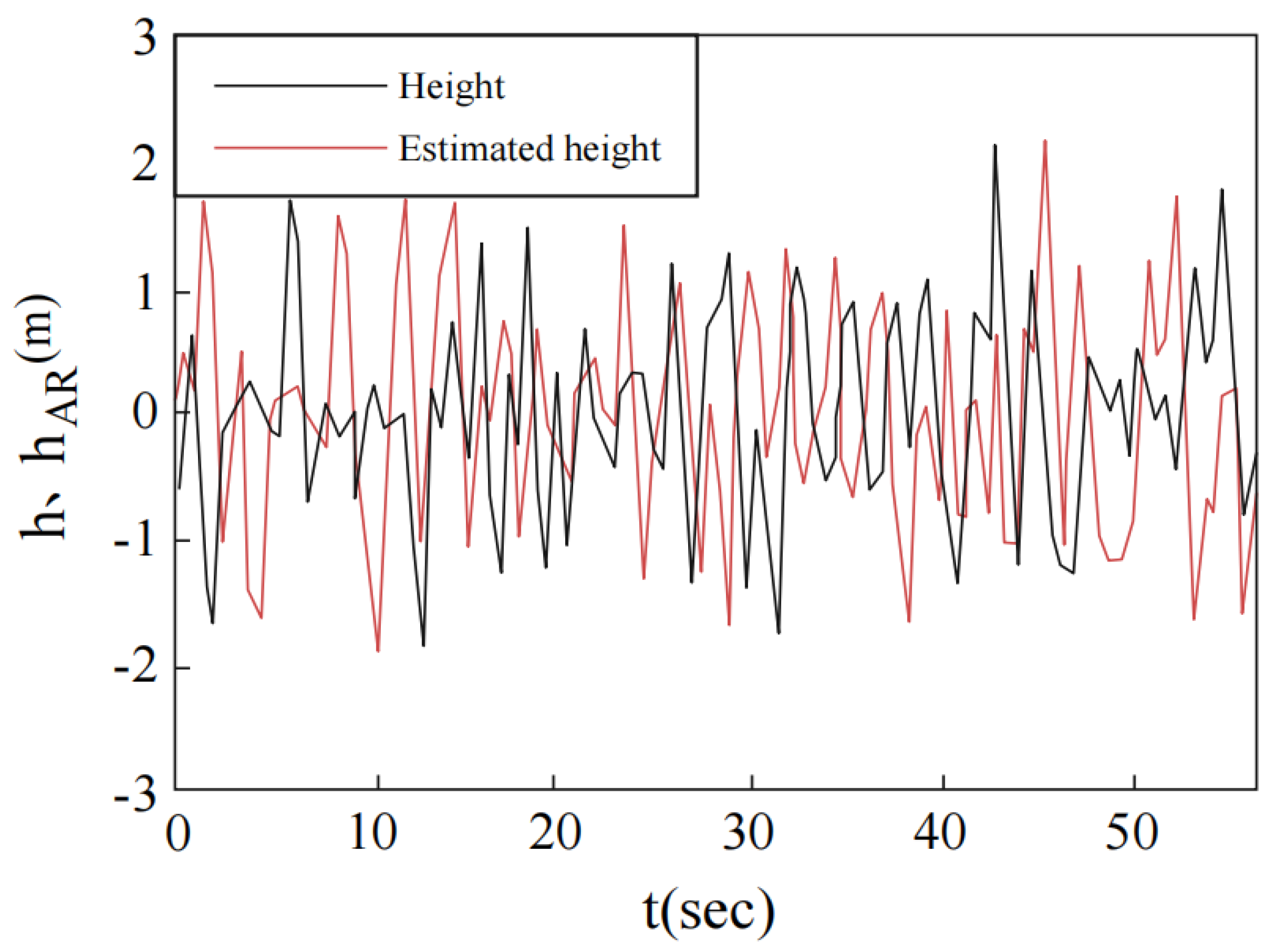
- Simulation of deck motion predictor based on AR model:
3. Research on Vertical Motion Compensation
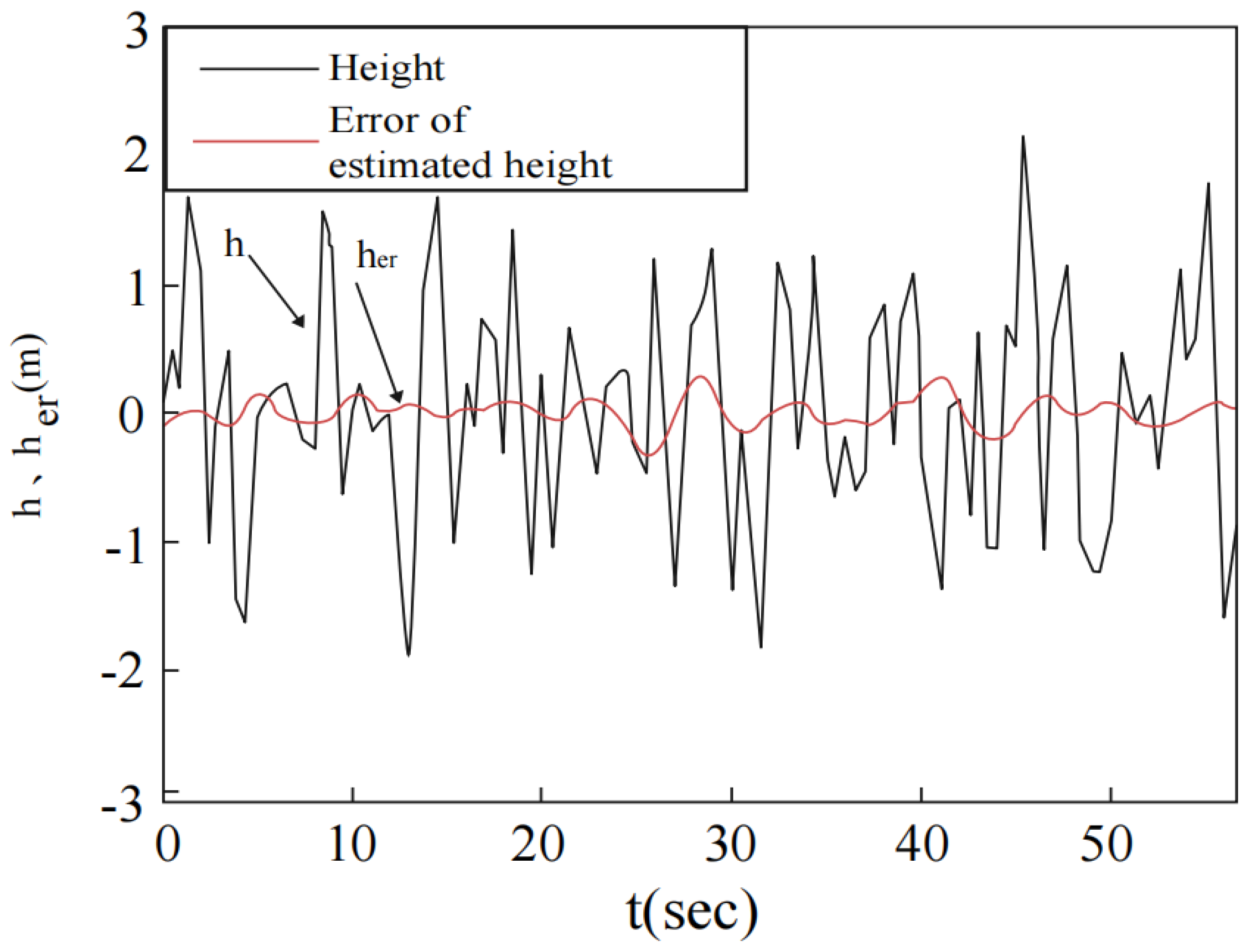
3.1. Design of Vertical Motion Compensator at Ideal Landing Point
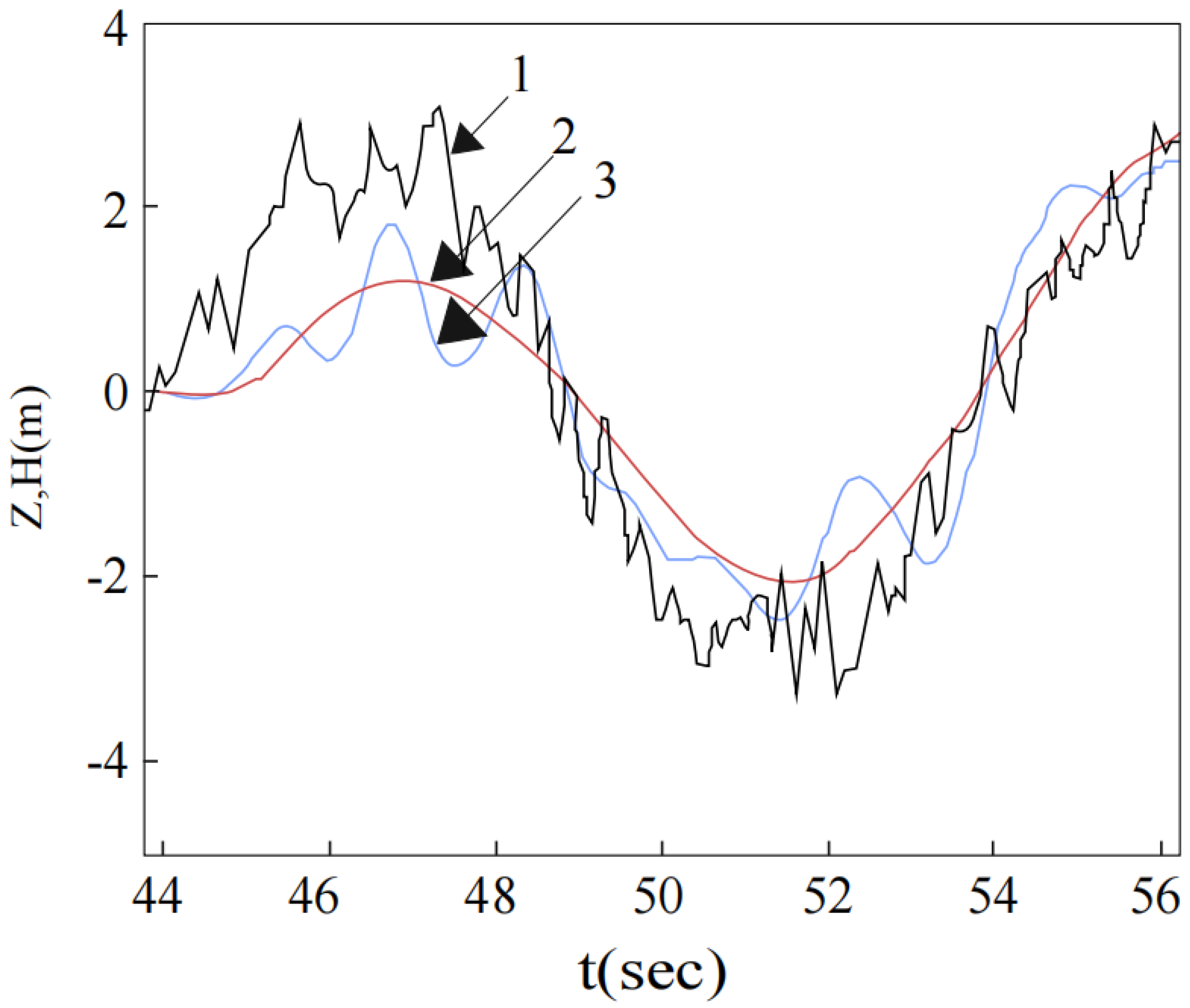
3.2. Compensation Effects Verification of Vertical Motion of the Ideal Landing Point
3.3. Simulation on the Compensation for the Vertical Motion at Ideal Landing Point
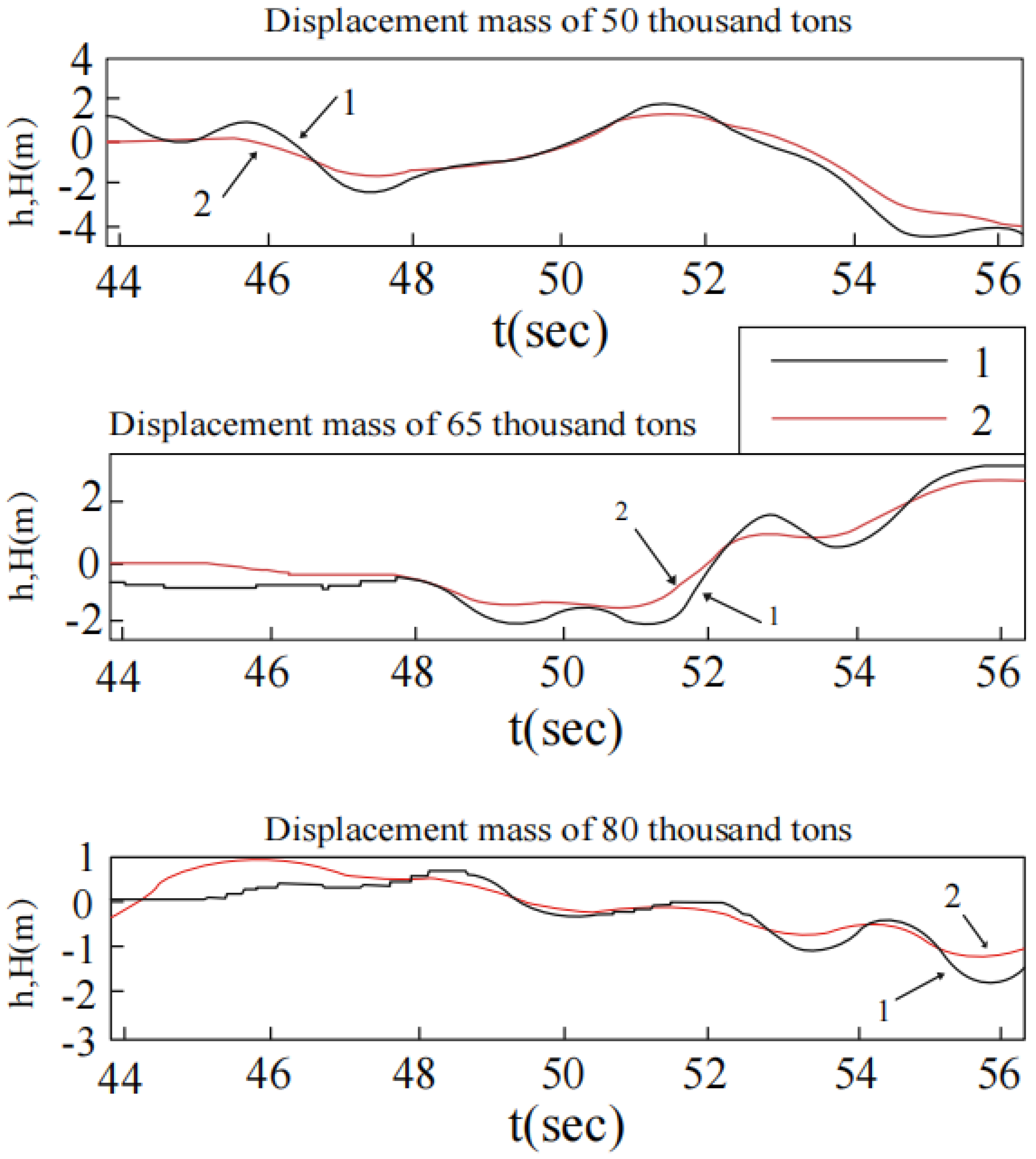
3.3.1. The Influence of Ship Size on Compensation Effects
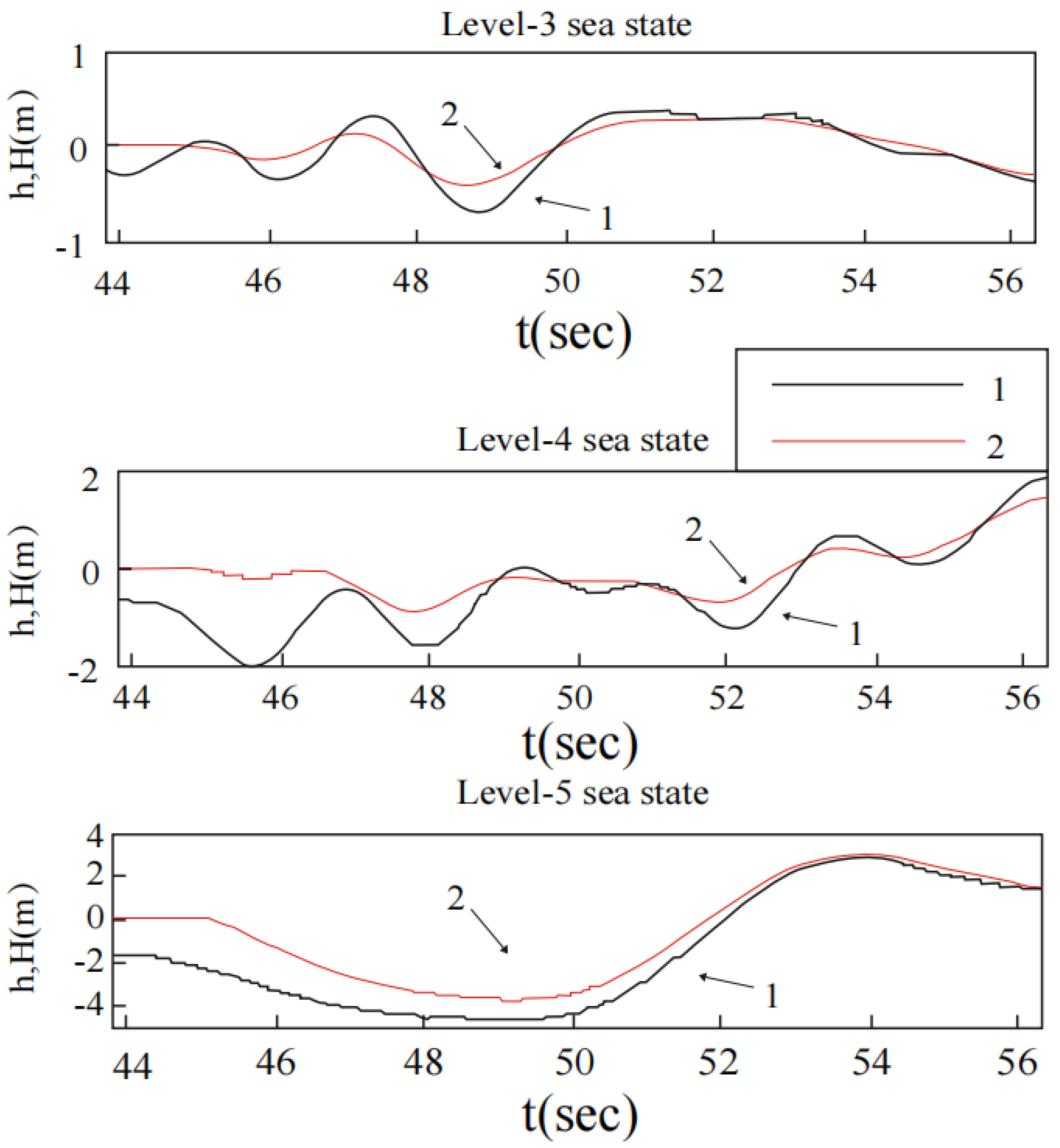
3.3.2. The Influence of State of Sea Scale on Compensation Effects
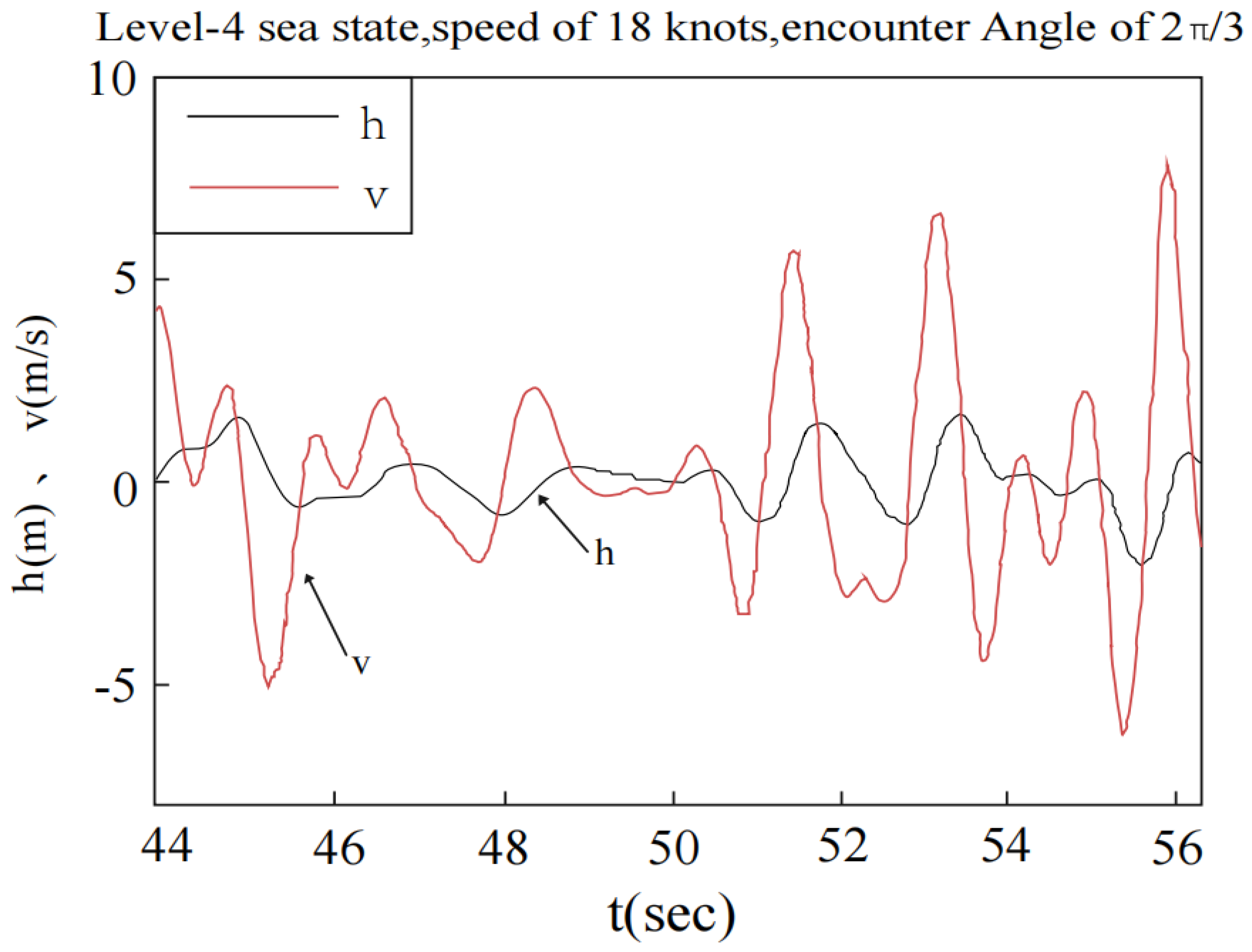
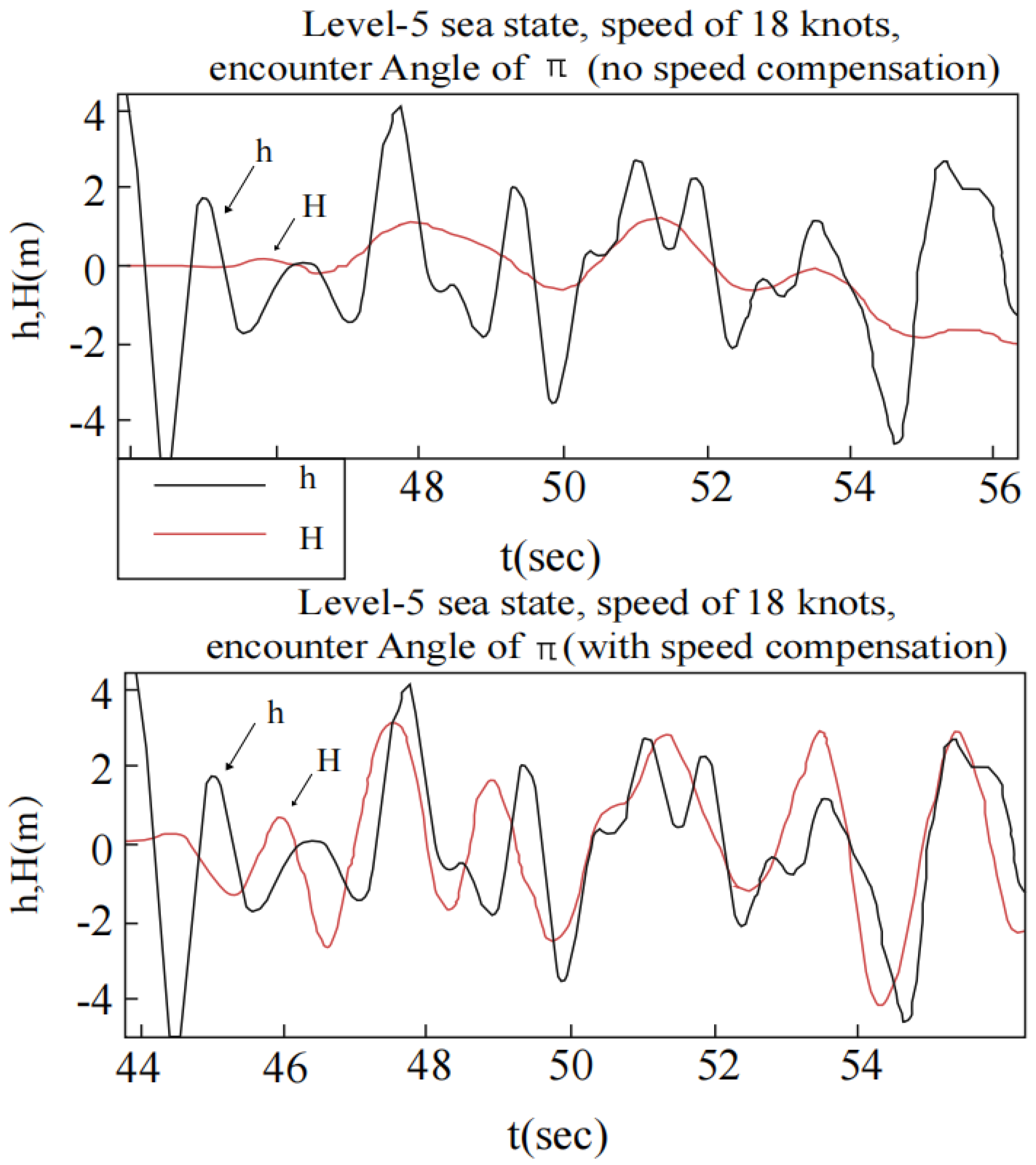
3.3.3. Influence of Ship Speed on Compensation Effect
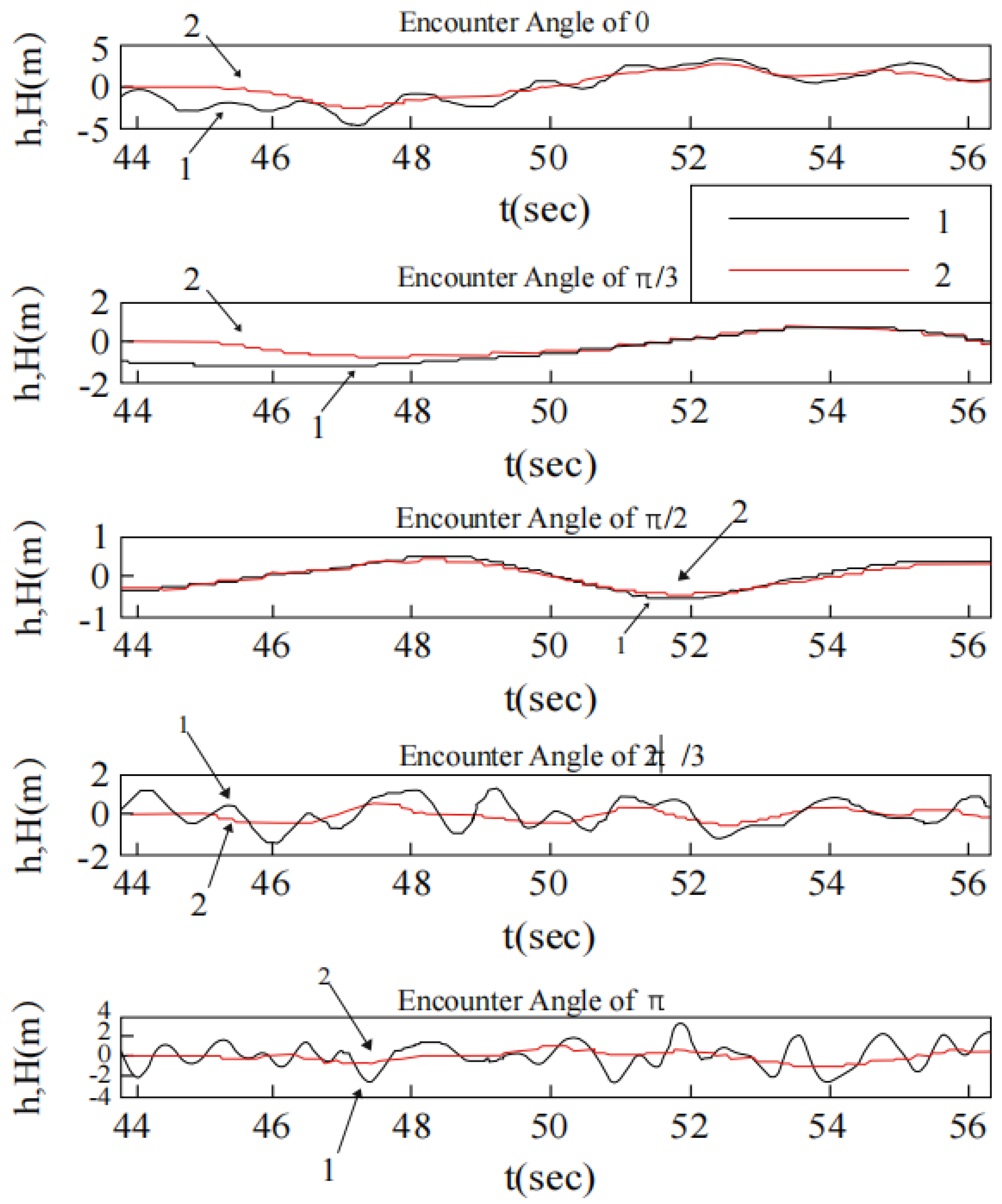
3.3.4. Influence of Ship Encounter Angle on Compensation Effect
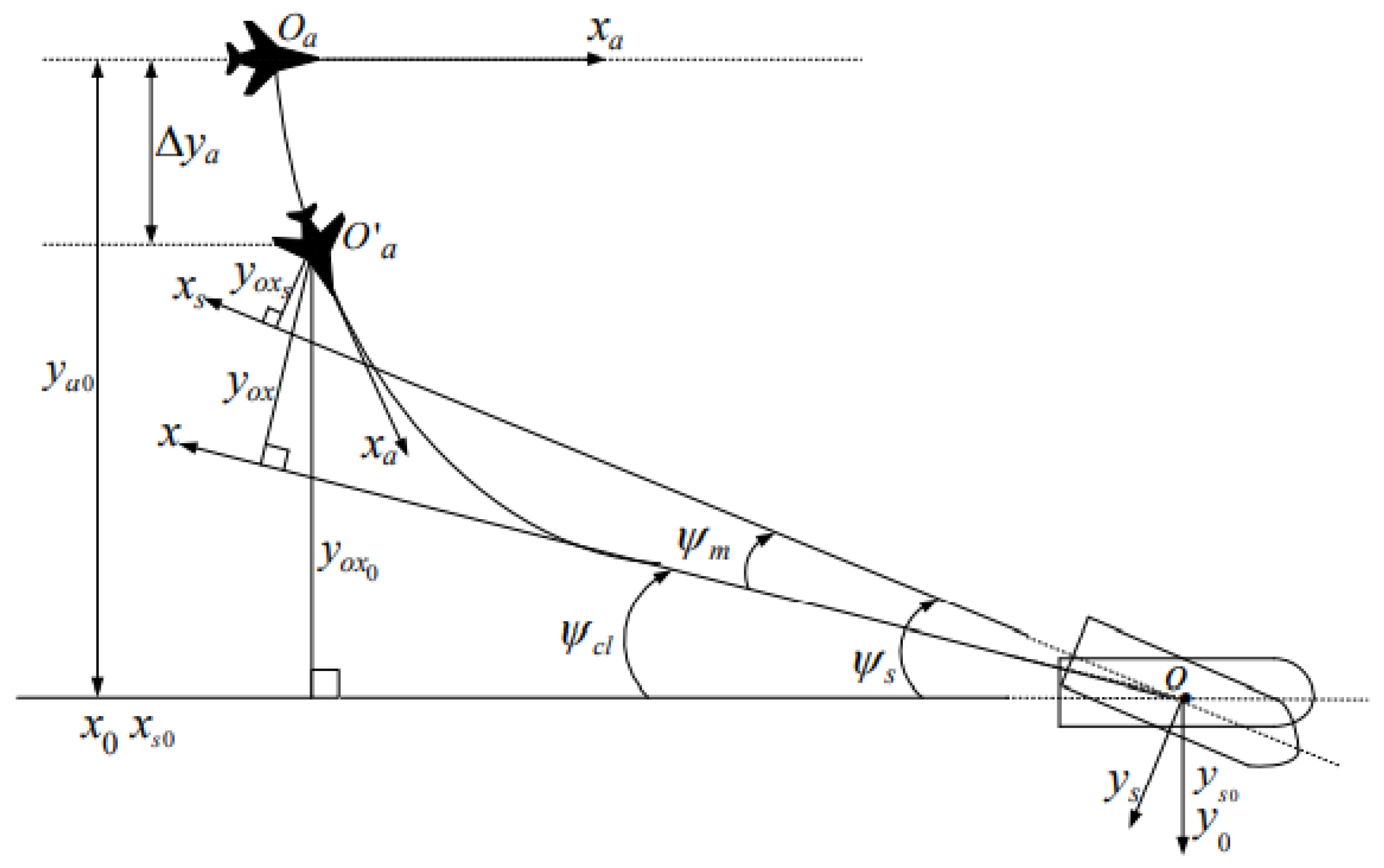
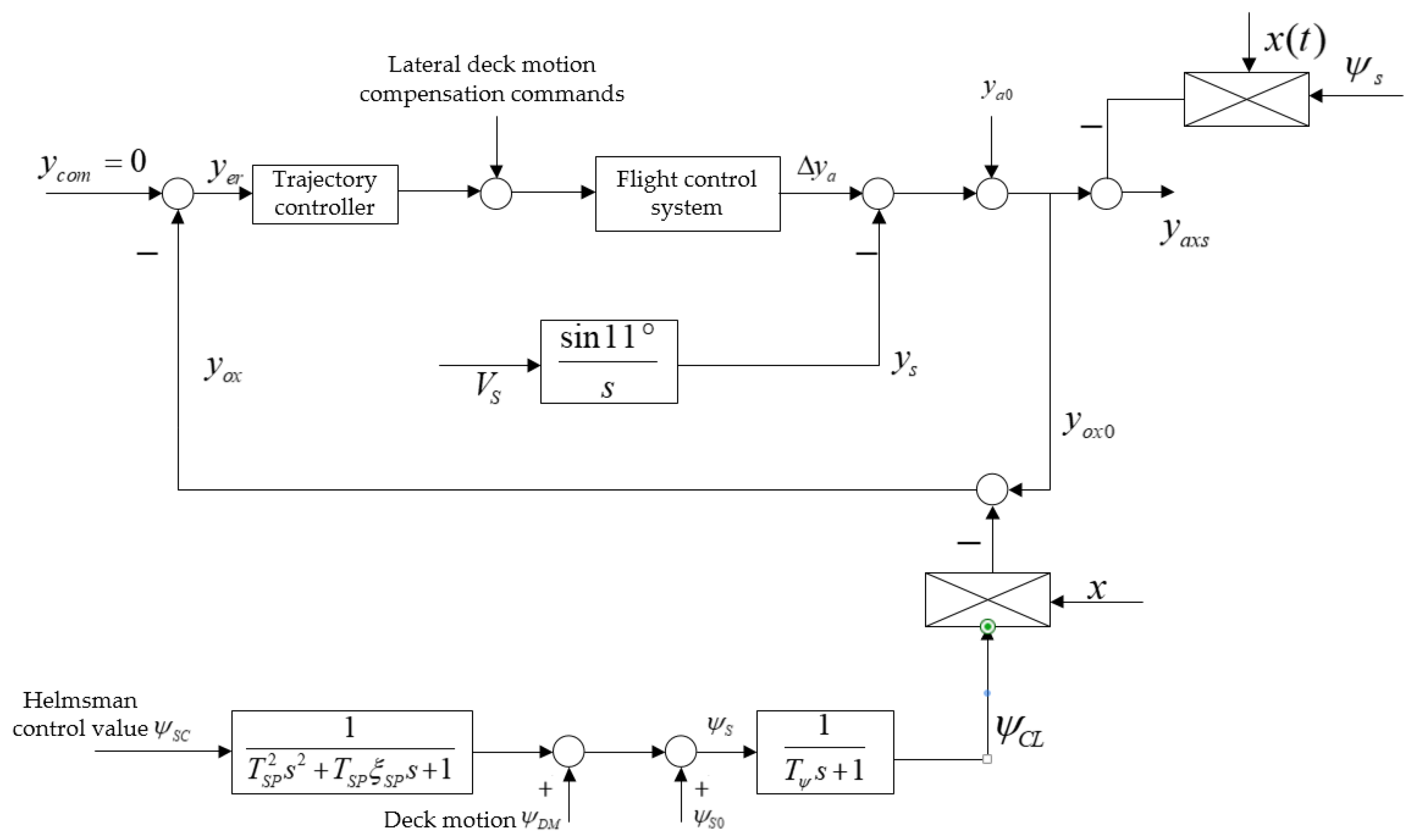
4. Research on Lateral Deck Motion Compensation
4.1. Overall Structure of Lateral Deck Motion Compensation Strategy
4.2. Strategy Design of Measurement Axis Tracking Deck Center Line
4.2.1. Integral Tracking Strategy Design
4.2.2. Inertial Tracking Strategy Design
4.3. Modeling and Simulation of Lateral Deck Motion Compensation Commands
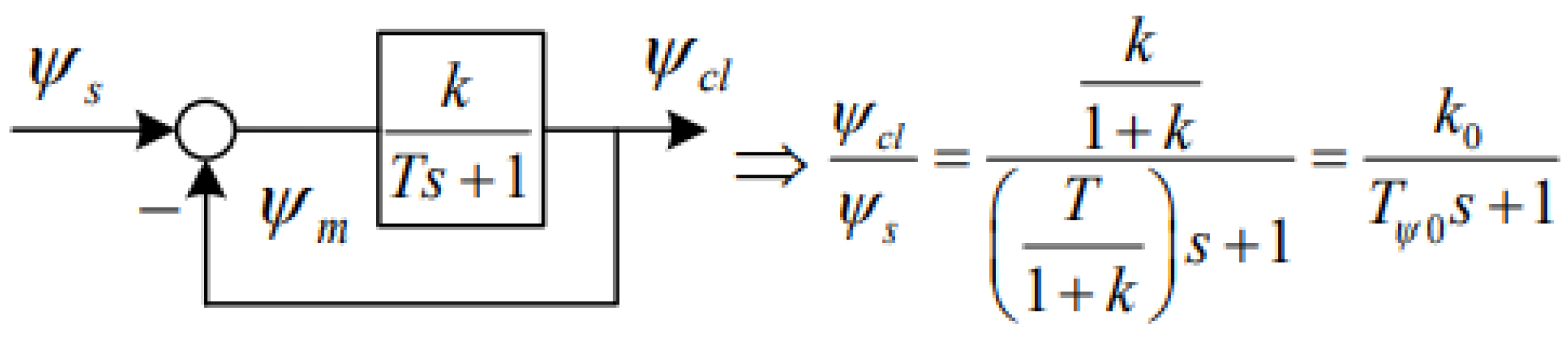
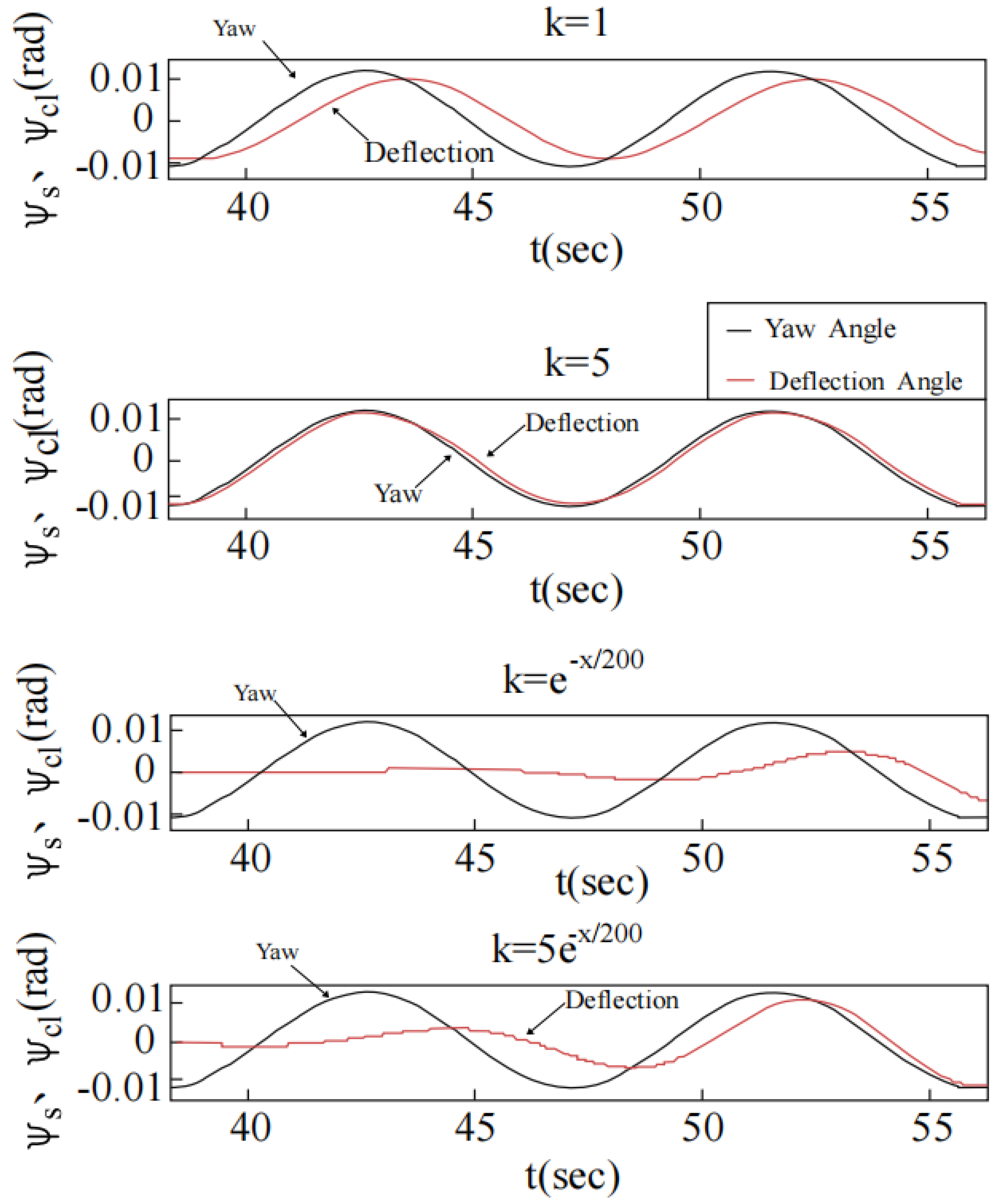
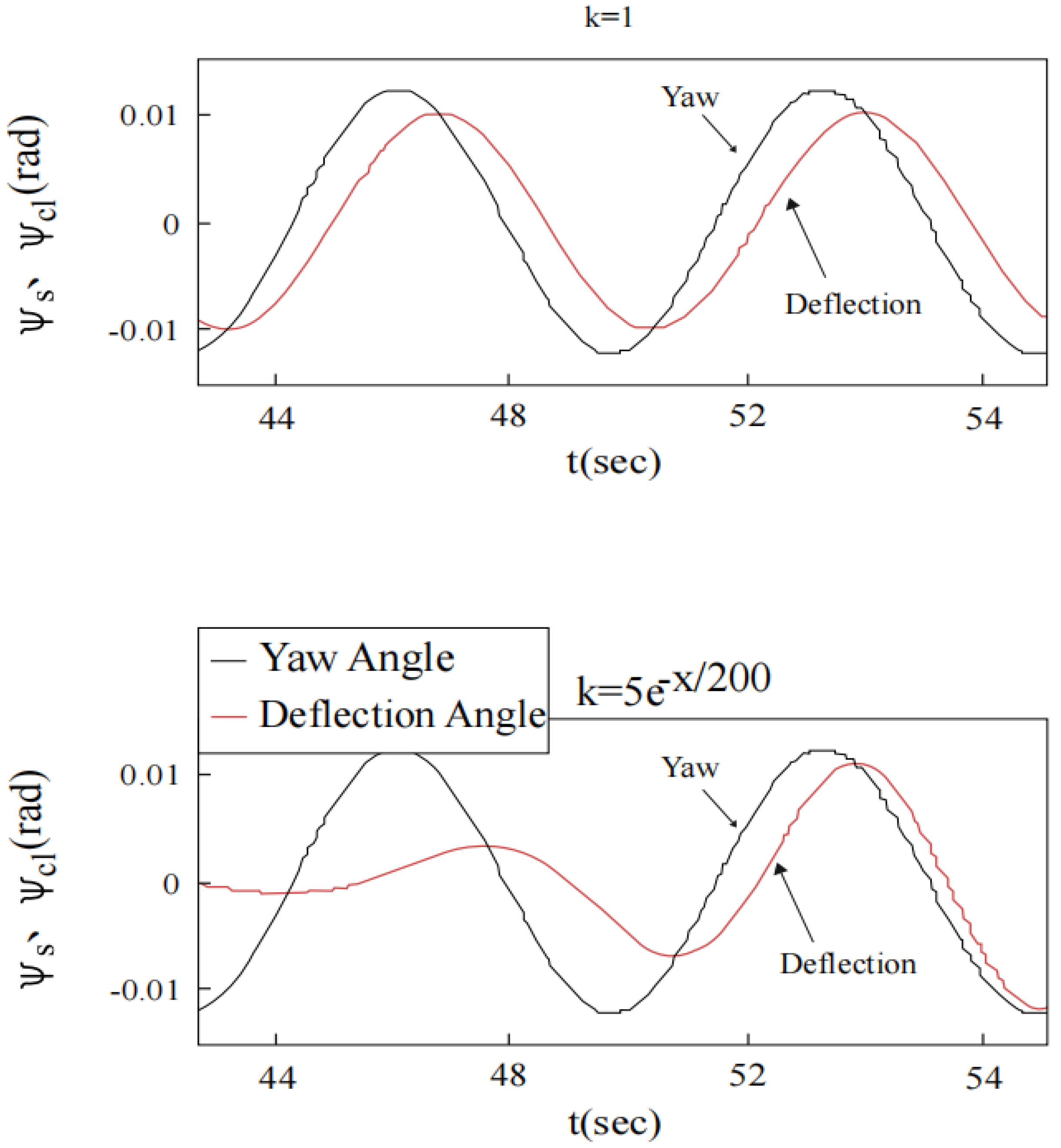
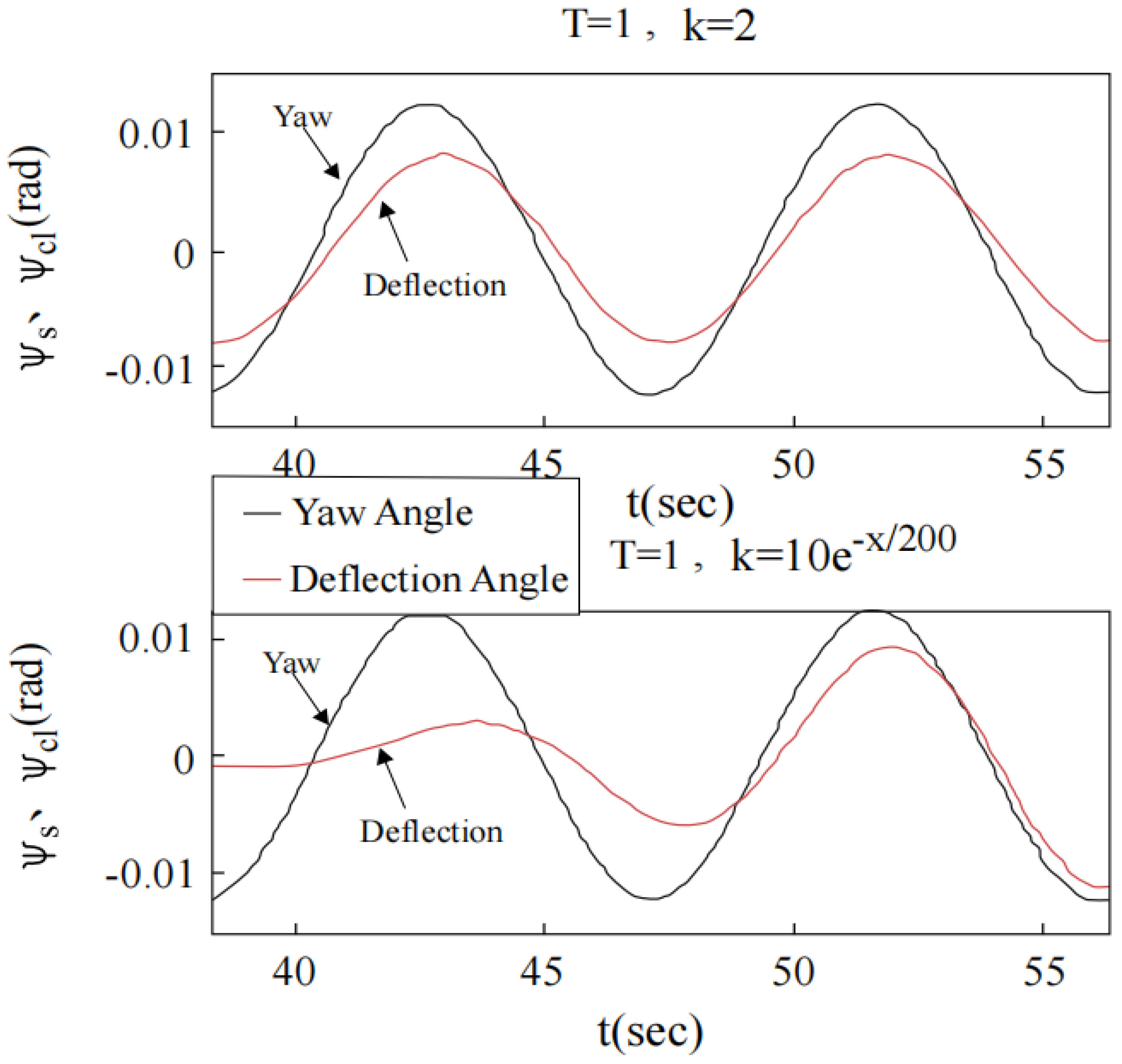
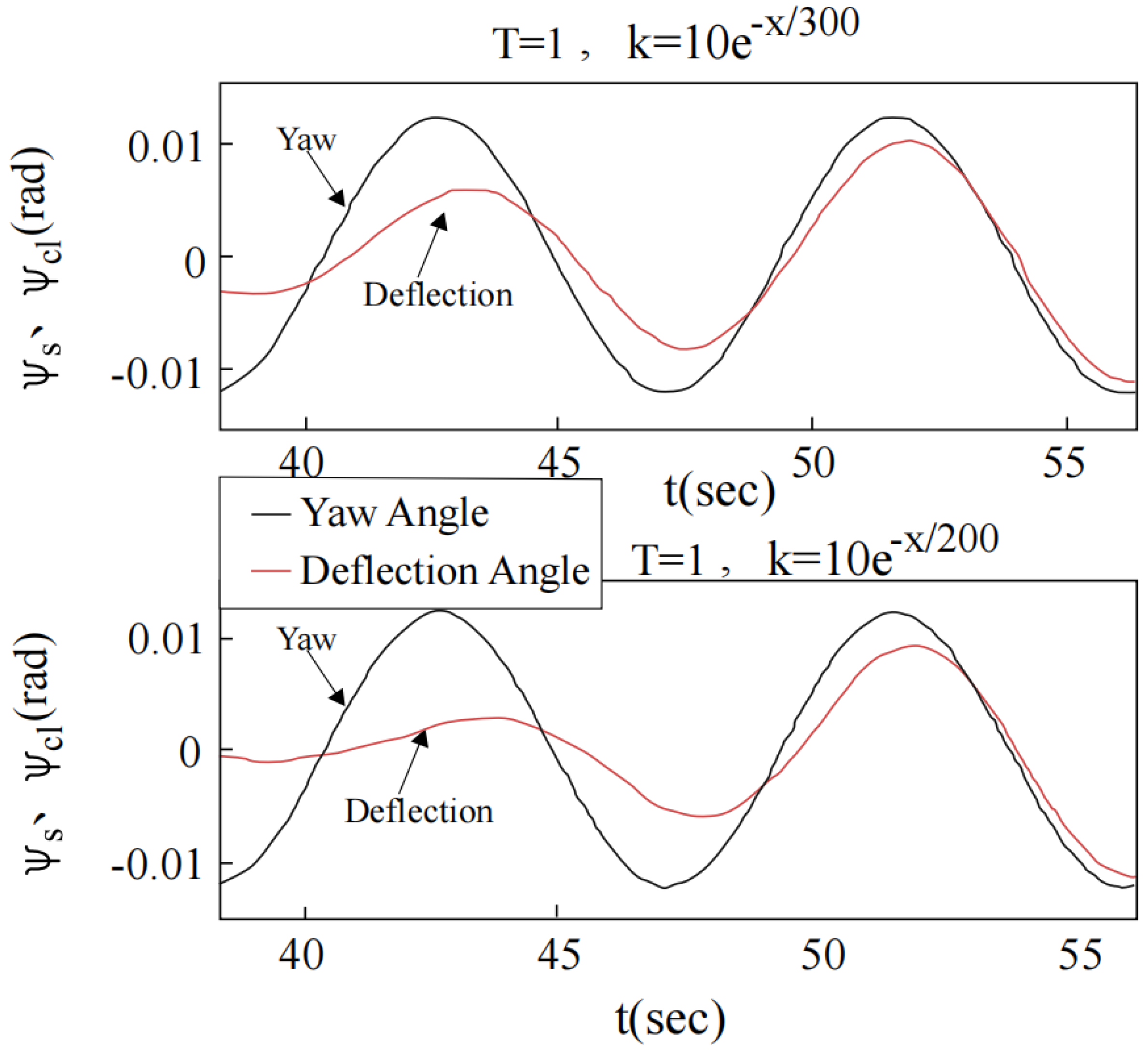
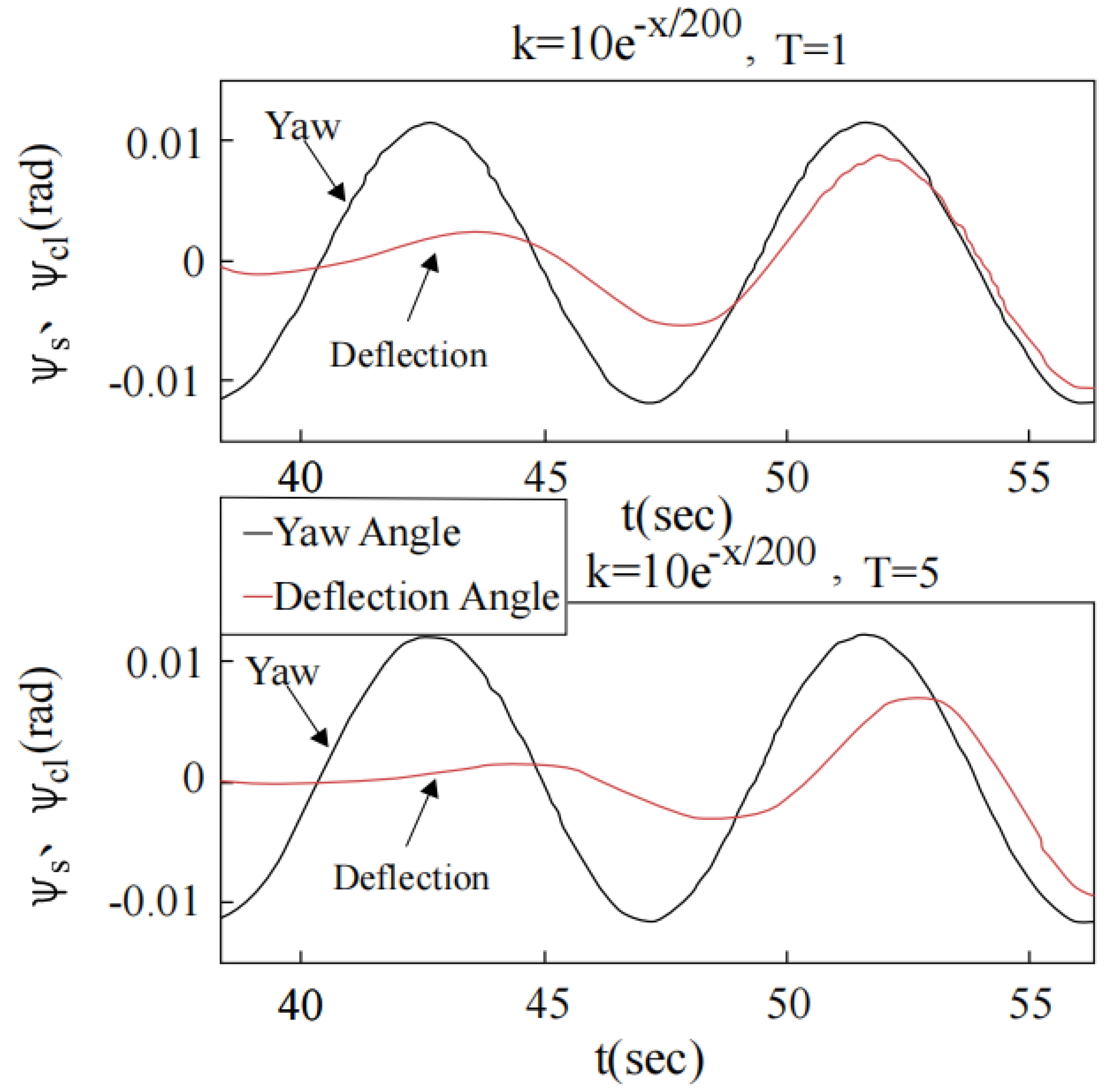
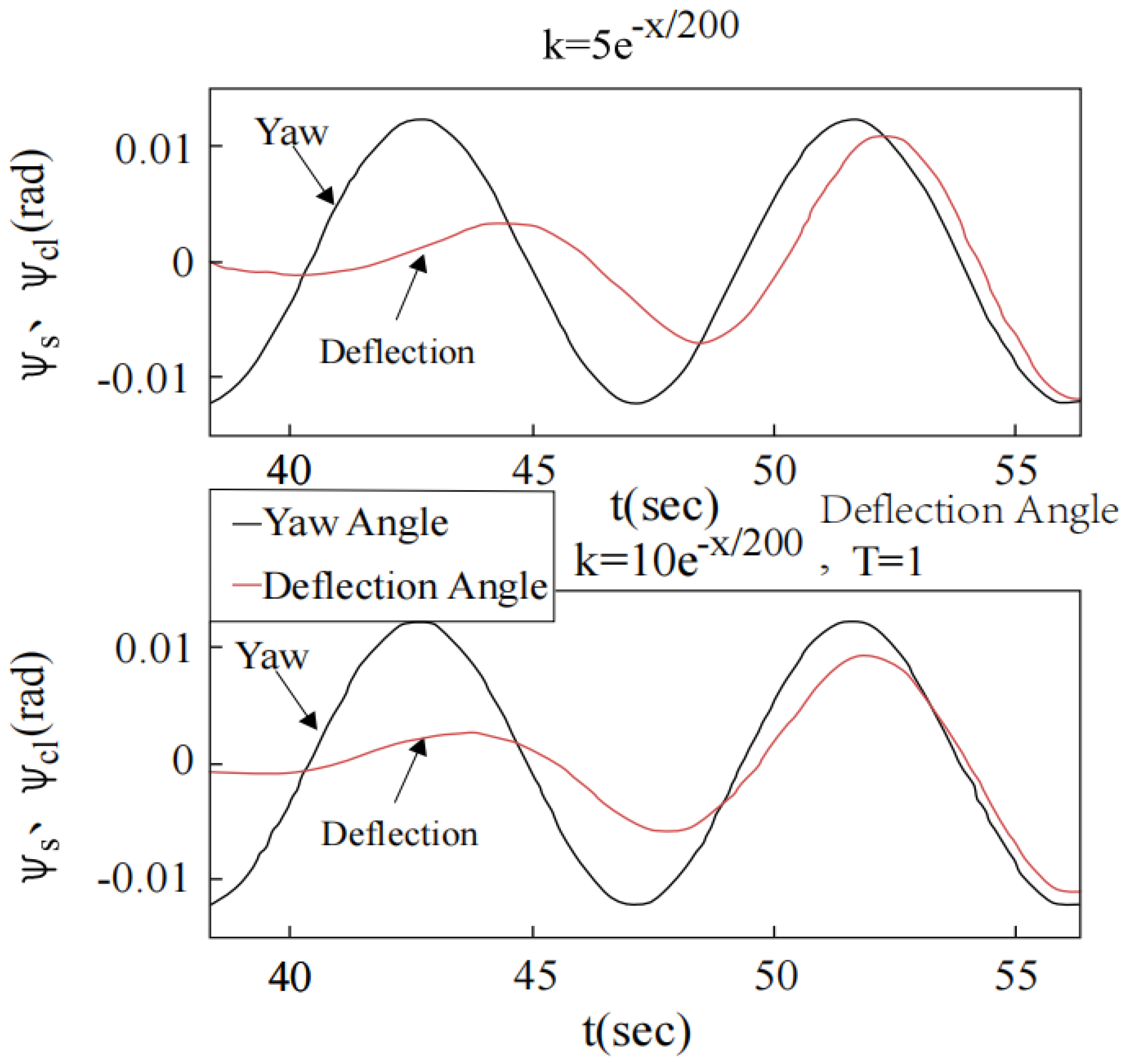
4.3.1. Design and Simulation Analysis of Yaw Compensation Command
4.3.2. Roll Compensation Instruction Design and Simulation Analysis
4.3.3. Design and Simulation Analysis of Parallel Compensation Command for Yaw and Roll
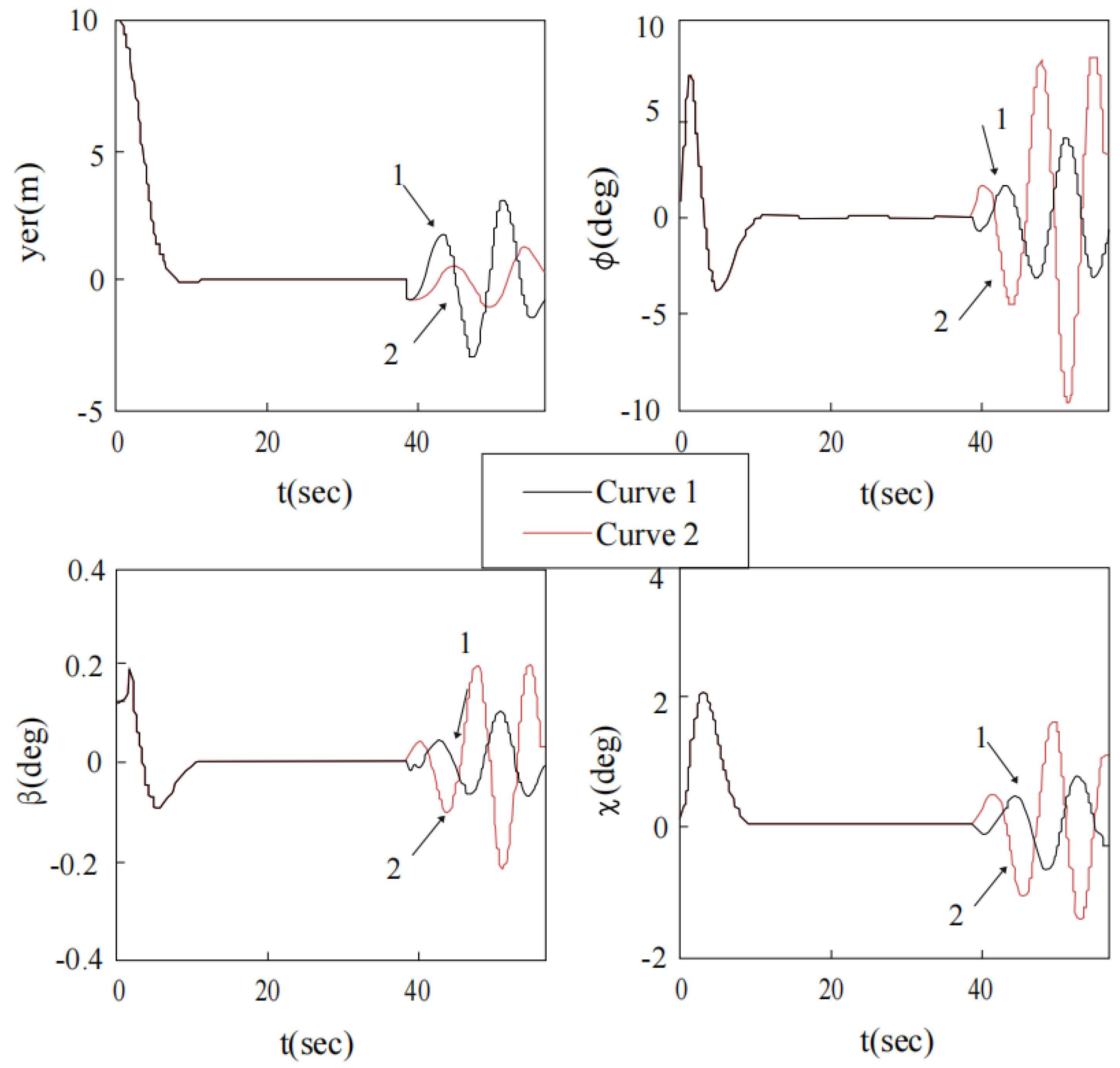
4.4. Simulation on the Compensation Effect for Lateral Deck Motion under Different Tracking Strategies
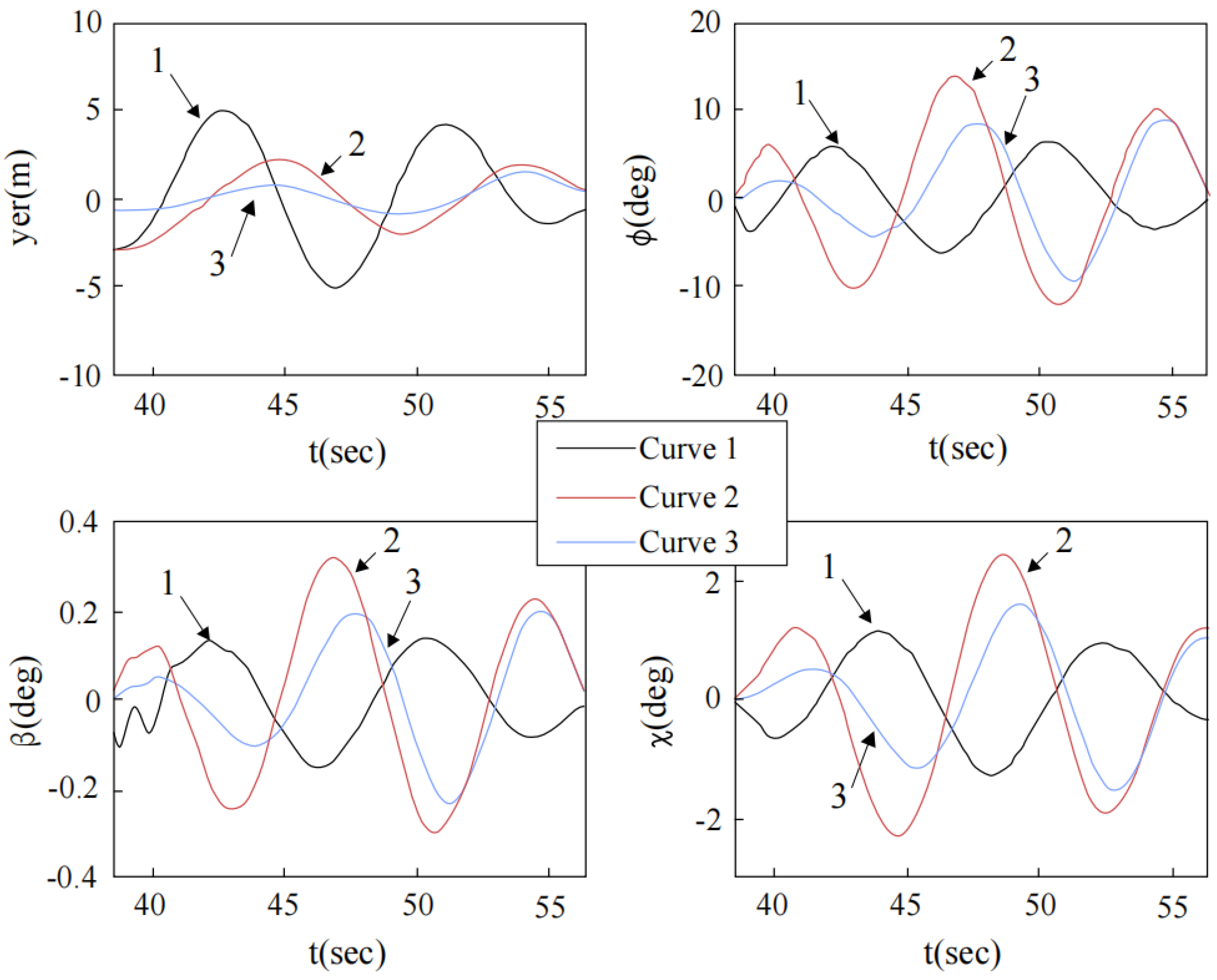
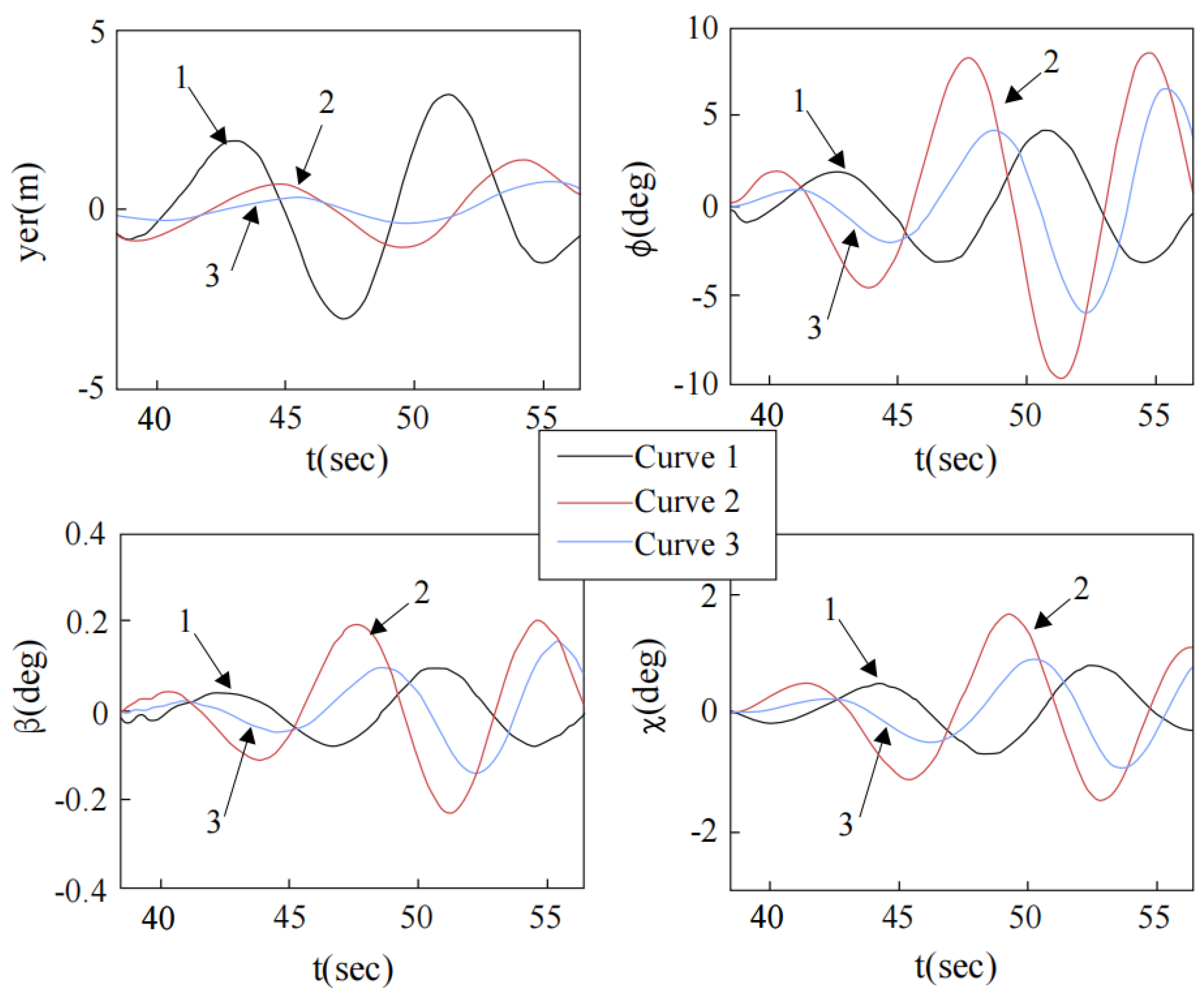
4.4.1. Compensation Effect under Integral Tracking Strategy
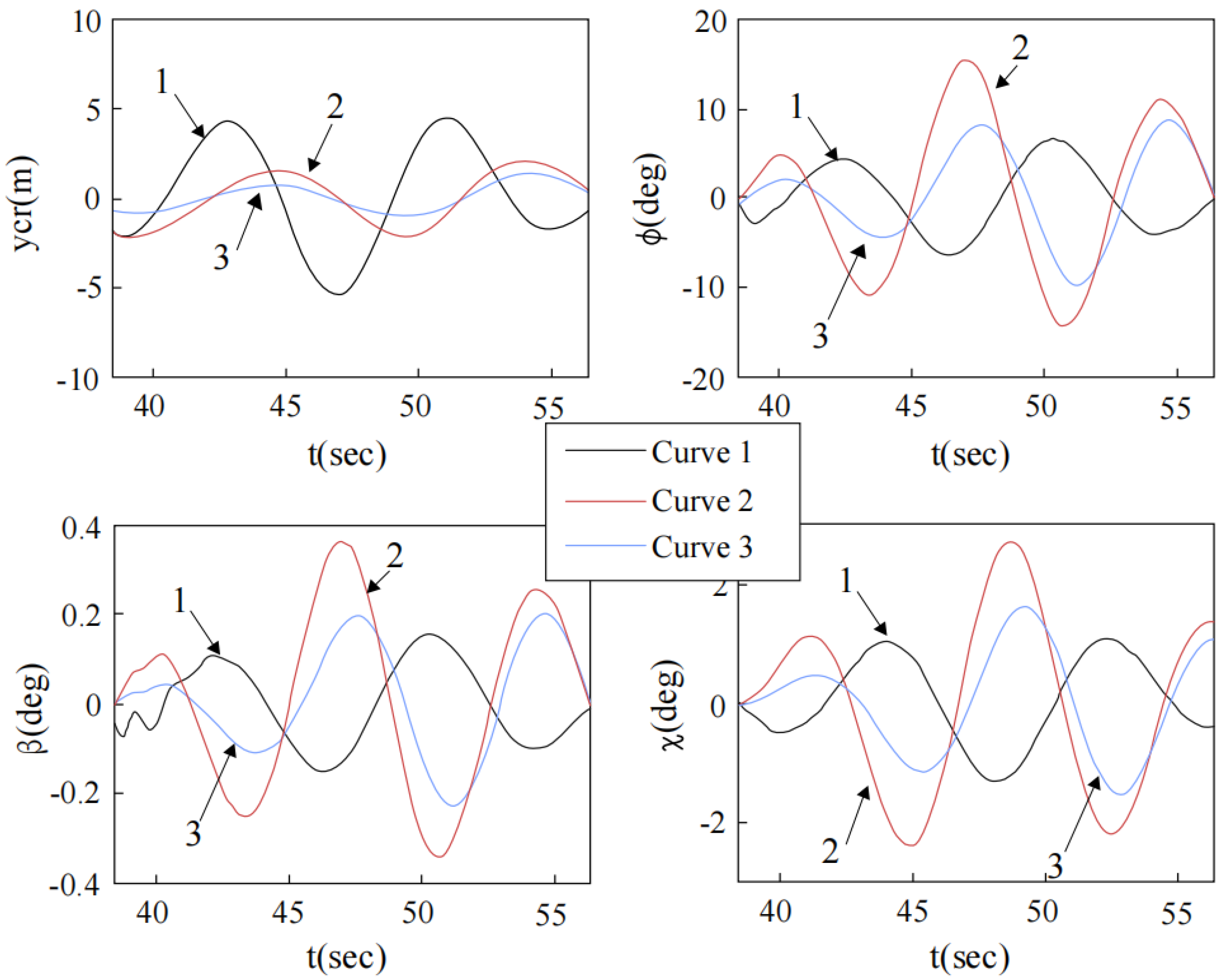
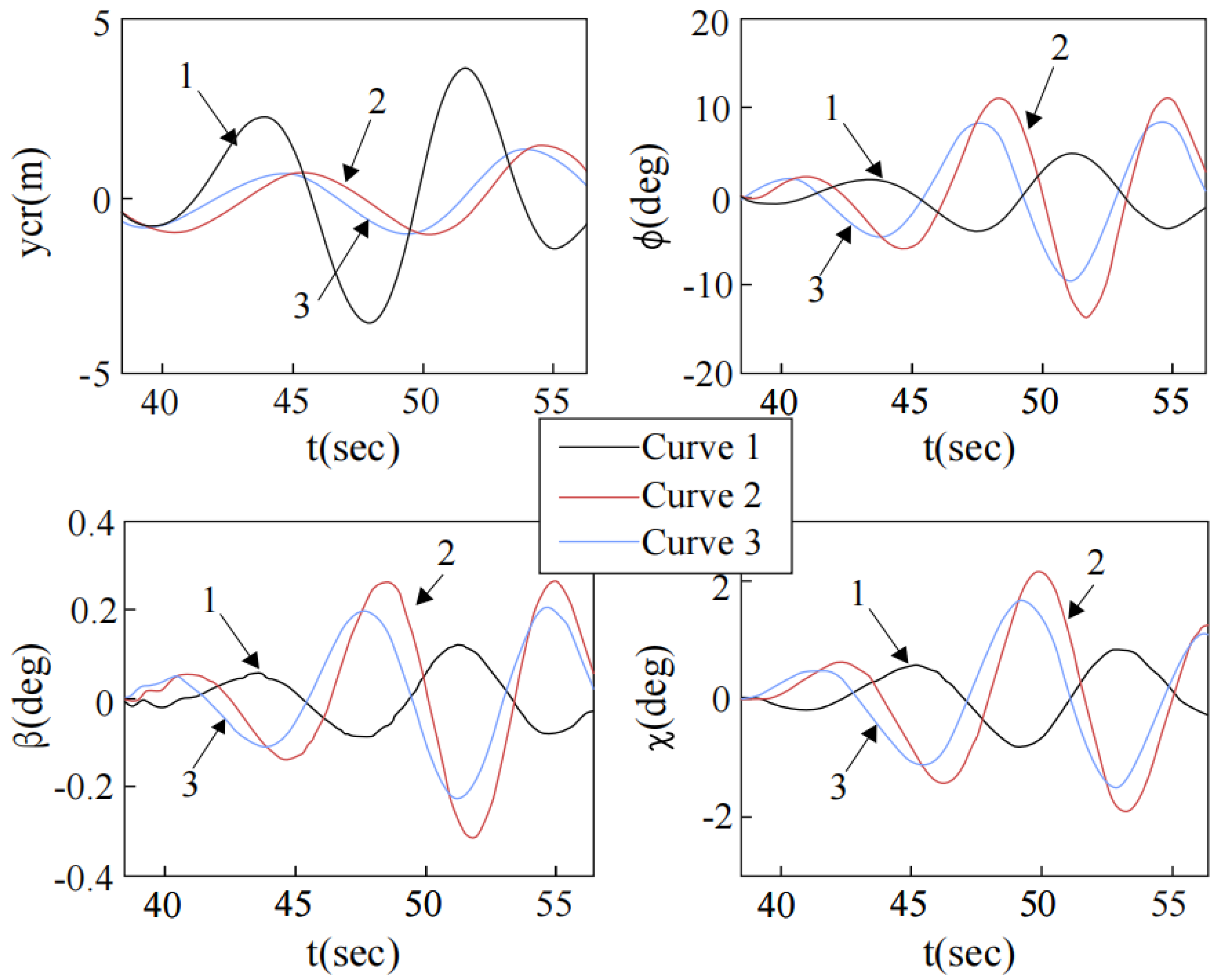
4.4.2. Compensation Effect under Inertial Tracking Strategy
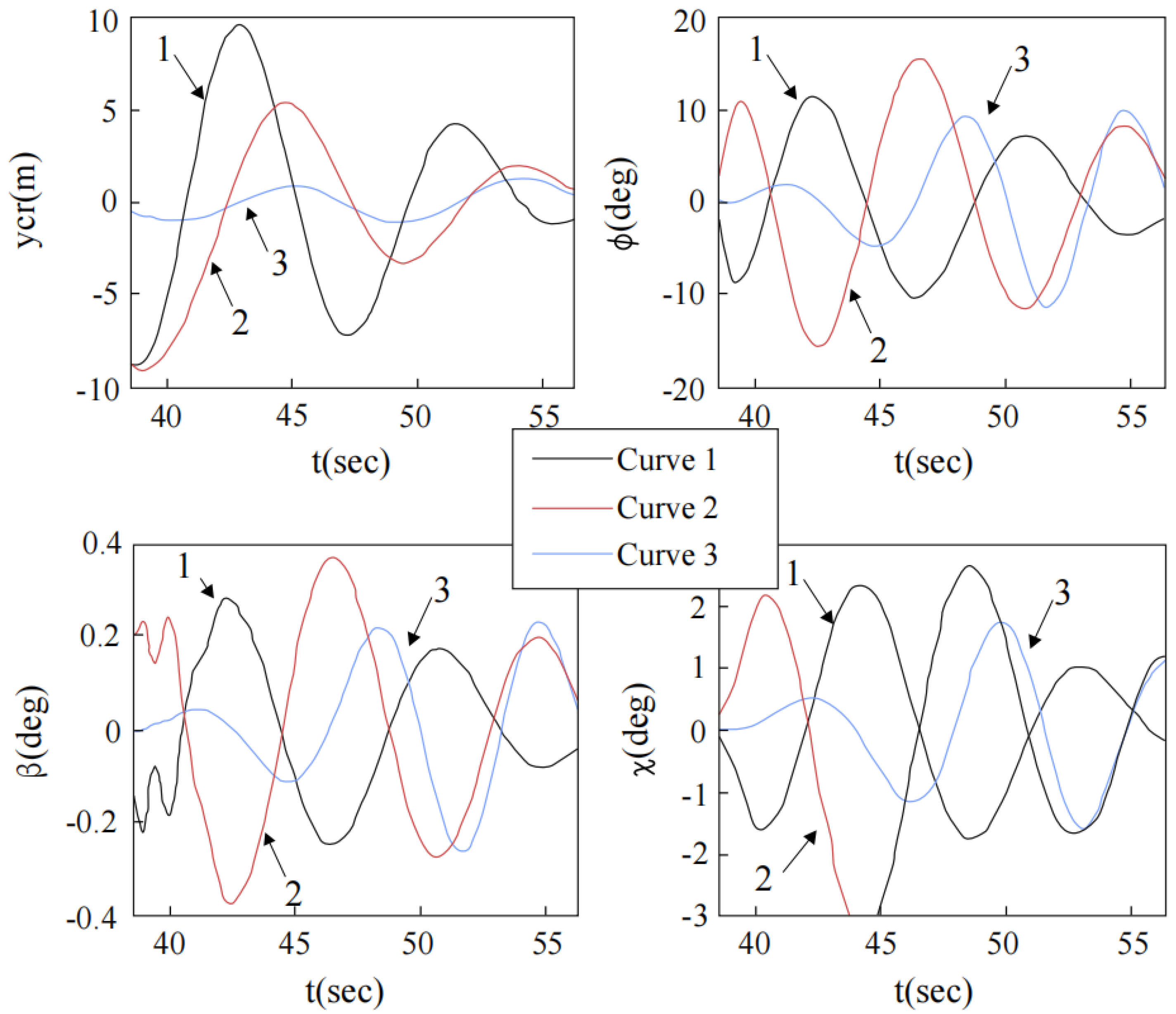
4.4.3. The Comparison and Analysis of the Compensation Effects under Two Strategies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xin, Z.H.O.U.; Rongkun, P.E.N.G.; Suozhong, Y.U.A.N.; Ju, J. Longitudinal Deck Motion Prediction and Compensation for Carrier Landing. J. Nanjing Univ. Aeronaut. Astronaut. 2013, 45, 599–604. [Google Scholar]
- Qu, H.; Guo, R.Z.; Ding, X.Z. Design of the Deck Longitudinal Motion Compensation for Carrier Landing. Aeronaut. Sci. Technol. 2016, 27, 13–17. [Google Scholar]
- Yu, Y.; Yang, Y.D. Study on the Lateral Deck Motion Compensation Technique. Acta Aeronaut. Astronaut. Sin. 2003, 24, 69–71. [Google Scholar]
- Li, H.X.; Gao, F.Y.; Hu, C.J.; An, Q.L.; Peng, X.Q.; Gong, Y.M. Trajectory Track for the Landing of Carrier Aircraft with the Forecast on the Aircraft Carrier Deck Motion. Math. Probl. Eng. 2021, 2021, 5597878. [Google Scholar] [CrossRef]
- Bhatia, A.K.; Ju, J.; Ziyang, Z.; Ahmed, N.; Rohra, A.; Waqar, M. Robust adaptive preview control design for autonomous carrier landing of F/A-18 aircraft. Aircr. Eng. Aerosp. Technol. 2021, 93, 642–650. [Google Scholar] [CrossRef]
- Bhatia, A.K.; Jiang, J.; Kumar, A.; Shah, S.A.A.; Rohra, A.; ZiYang, Z. Adaptive preview control with deck motion compensation for autonomous carrier landing of an aircraft. Int. J. Adapt. Control Signal Process. 2021, 35, 769–785. [Google Scholar] [CrossRef]
- Xue, Y.X.; Zhen, Z.Y.; Yang, L.Q.; Wen, L.D. Adaptive fault-tolerant control for carrier-based UAV with actuator failures. Aerosp. Sci. Technol. 2020, 107, 106227. [Google Scholar] [CrossRef]
- Zhen, Z.; Jiang, S.; Ma, K. Automatic carrier landing control for unmanned aerial vehicles based on preview control and particle filtering. Aerosp. Sci. Technol. 2018, 81, 99–107. [Google Scholar] [CrossRef]
- Chang, C.W.; Lo, L.Y.; Cheung, H.C.; Feng, Y.; Yang, A.S.; Wen, C.Y.; Zhou, W. Proactive Guidance for Accurate UAV Landing on a Dynamic Platform: A Visual–Inertial Approach. Sensors 2022, 22, 404. [Google Scholar] [CrossRef] [PubMed]
- Park, M.-C.; Hur, H. Implementation of Educational UAV with Automatic Navigation Flight. J. Korea Soc. Comput. Inf. 2019, 24, 29–35. [Google Scholar]
- Lungu, M. Auto-landing of fixed wing unmanned aerial vehicles using the backstepping control. Isa Trans. 2019, 95, 194–210. [Google Scholar] [CrossRef] [PubMed]
- Lungu, M. Auto-landing of UAVs with variable canter of mass using the backstepping and dynamic inversion control. Aerosp. Sci. Technol. 2020, 103, 105912.1–105912.15. [Google Scholar] [CrossRef]
- Higuera, J.G.; Kumin, H.J.; Fagan, J.E.; McCartor, G. A Statistical Analysis of Balked Landing Approaches for the Airbus A380 under GBAS Guidance. Navigation 2009, 56, 175–184. [Google Scholar] [CrossRef]
- Zaal, P.M.; Schroeder, J.A.; Chung, W.W. Objective motion cueing criteria investigation based on three flight tasks. Aeronaut. J. 2017, 121, 163–190. [Google Scholar] [CrossRef] [Green Version]
- Jeong, M.S.; Bae, J.; Jun, H.S.; Lee, Y.J. Flight test evaluation of ILS and GBAS performance at Gimpo International Airport. Gps Solut. 2015, 20, 473–483. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, Q.; Zhang, Z.; Dong, R. Modeling pilot behaviors based on discrete-time series during carrier-based aircraft landing. J. Aircr. 2016, 53, 1922–1931. [Google Scholar] [CrossRef]
- Izadi, H.; Pakmehr, M.; Sadati, N. Optimal neuro-controller in longitudinal auto-landing of a commercial jet transport. In Proceedings of the 2003 IEEE Conference on Control Applications, 2003. CCA 2003, Istanbul, Turkey, 25 June 2003; Volume 1, pp. 492–497. [Google Scholar]
- Bian, Q.; Nener, B.; Wang, X. An improved NSGA-II based control allocation optimization for aircraft longitudinal automatic landing system. Int. J. Control 2019, 92, 705–716. [Google Scholar] [CrossRef]
- Lungu, R.; Lungu, M.; Grigorie, L.T. Automatic control of aircraft in longitudinal plane during landing. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1338–1350. [Google Scholar] [CrossRef]
- Xu, G.; Liu, G.; Jiang, X.; Qian, W. Effect of pitch down motion on the vortex reformation over fighter aircraft. Aerosp. Sci. Technol. 2018, 73, 278–288. [Google Scholar] [CrossRef]
- Brandon, J.M. Dynamic stall effects and applications to high performance aircraft. Aircraft Dynamics at High Angles of Attack: Ezperiments and Modelling 1991. Available online: https://dl.acm.org/doi/book/10.5555/887303 (accessed on 15 August 2022).
- Tayebi, A.; McGilvray, S. Attitude stabilization of a VTOL quadrotor aircraft. IEEE Trans. Control Syst. Technol. 2006, 14, 562–571. [Google Scholar] [CrossRef]
- Su, X.; Li, H.; Zhang, Y.; Jiang, H.; Zhao, M. Research on Landing Environment System of Carrier-Based Aircraft. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 2747–2750. [Google Scholar]
- Li, H.; Su, X.; Jiang, H. Modeling landing control system of carrier-based aircraft on internet of things. In Proceedings of the International Conference on Software Intelligence Technologies and Applications & International Conference on Frontiers of Internet of Things, Hsinchu, Taiwan, 4–6 December 2014. [Google Scholar]
- Liang, Y.; Chen, X.; Xu, R. Research on Longitudinal Landing Track Control Technology of Carrier-based Aircraft. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 3039–3044. [Google Scholar]
- Kayani, I.K.; Ahsan, M.; Rashid, M.I.; Rind, S.A. Technical Papers Parallel Session-VI: A new perspective to velocity control for fixed wing UAVs. In Proceedings of the International Conference on Information and Communication Technologies, Karachi, Pakistan, 12–13 December 2015. [Google Scholar]
- Foster, W.C.; Gieseking, D.L.; Waymeyer, W.K. A nonlinear filter for independent gain and phase (with applications). J. Basic Eng. 1966, 88, 457–462. [Google Scholar] [CrossRef]
- Zhai, X.; Qian, Z.; Xin, G. Research on UAV degrade control system under sensor fault state. In Proceedings of the 2010 Second WRI Global Congress on Intelligent Systems, Wuhan, China, 16–17 December 2010; Volume 2, pp. 20–23. [Google Scholar]
- Yu, Y.; Wang, H.; Li, N.; Su, Z.; Wu, J. Automatic carrier landing system based on active disturbance rejection control with a novel parameters optimizer. Aerosp. Sci. Technol. 2017, 69, 149–160. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level of Sea State | Significant Wave Height (m) | Average Period (sec) | Average Wave Length (m) | Wind Speed (Knot) |
|---|---|---|---|---|
| 3 | 1 | 3.6 | 15.8 | 11~16 |
| 4 | 2 | 5.1 | 30.2 | 17~21 |
| 5 | 3.2 | 6.4 | 48.8 | 22~27 |
| 6 | 4.4 | 7.5 | 64.4 | 28~33 |
| Significant Wave Height (m) | Wind Speed (m/s) | Simulation Frequency Band (rad/s) | Frequency Increment (rad/s) |
|---|---|---|---|
| <2.5 | <8.0 | 0.30~3.0 | 0.10 |
| 2.5~5.0 | 8.0~11.5 | 0.24~2.4 | 0.08 |
| >5.0 | >11.5 | 0.08~1.7 | 0.06 |
| Ship length (m) | 265 |
| Ship width (m) | 30.5 |
| Draft of water (m) | 10 |
| Displacement (ton) | 65,000 |
| Water plane area coefficient | 0.85 |
| Block coefficient | 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, C.; Wang, Z.; Gong, Z.; Cai, P.; Zhang, C. Prediction and Compensation Model of Longitudinal and Lateral Deck Motion for Automatic Landing Guidance System. Mathematics 2022, 10, 3440. https://doi.org/10.3390/math10193440
Cheng C, Wang Z, Gong Z, Cai P, Zhang C. Prediction and Compensation Model of Longitudinal and Lateral Deck Motion for Automatic Landing Guidance System. Mathematics. 2022; 10(19):3440. https://doi.org/10.3390/math10193440
Chicago/Turabian StyleCheng, Chen, Zian Wang, Zheng Gong, Pengcheng Cai, and Chengxi Zhang. 2022. "Prediction and Compensation Model of Longitudinal and Lateral Deck Motion for Automatic Landing Guidance System" Mathematics 10, no. 19: 3440. https://doi.org/10.3390/math10193440