
A Review of Intelligent Connected Vehicle Cooperative Driving Development




Abstract
:1. Introduction
2. Research Method
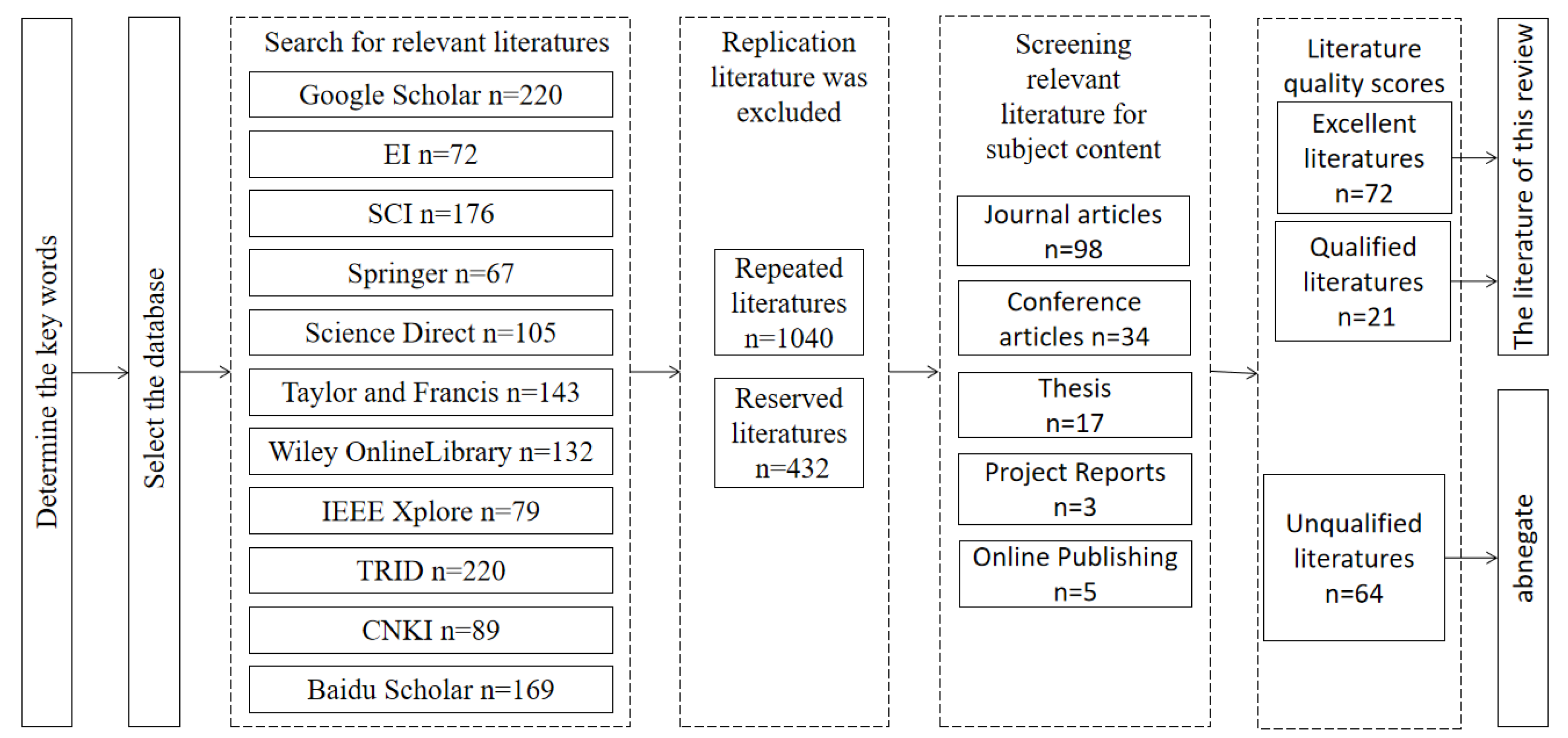
2.1. Literature Search
- (1)
- intelligent vehicle cooperative development, intelligent connected vehicles;
- (2)
- vehicle queue, collaborative positioning, collaborative control and decision, multi-vehicle, CACC;
- (3)
- communication security, communication delay, and internet of vehicles;
- (4)
- intelligent connected vehicle test platform, test software, experimental method and evaluation system.
2.2. Literature Screening
2.3. Information Extraction
2.4. Comprehensive Analysis of the Literature Results
3. Cooperative Control
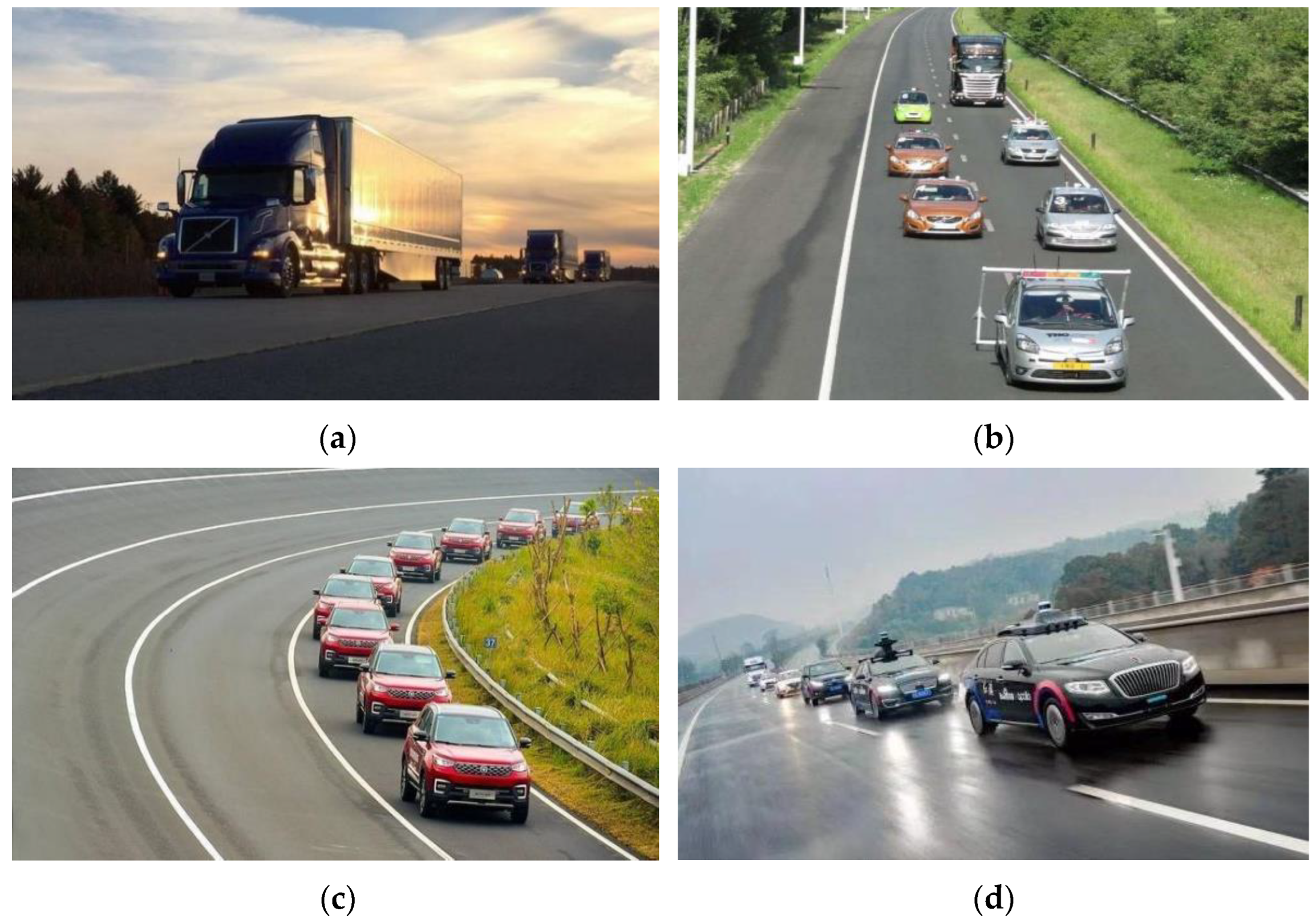
3.1. Vertical Formation
3.2. Vehicle Collaborative Decision-Making and Control Strategy
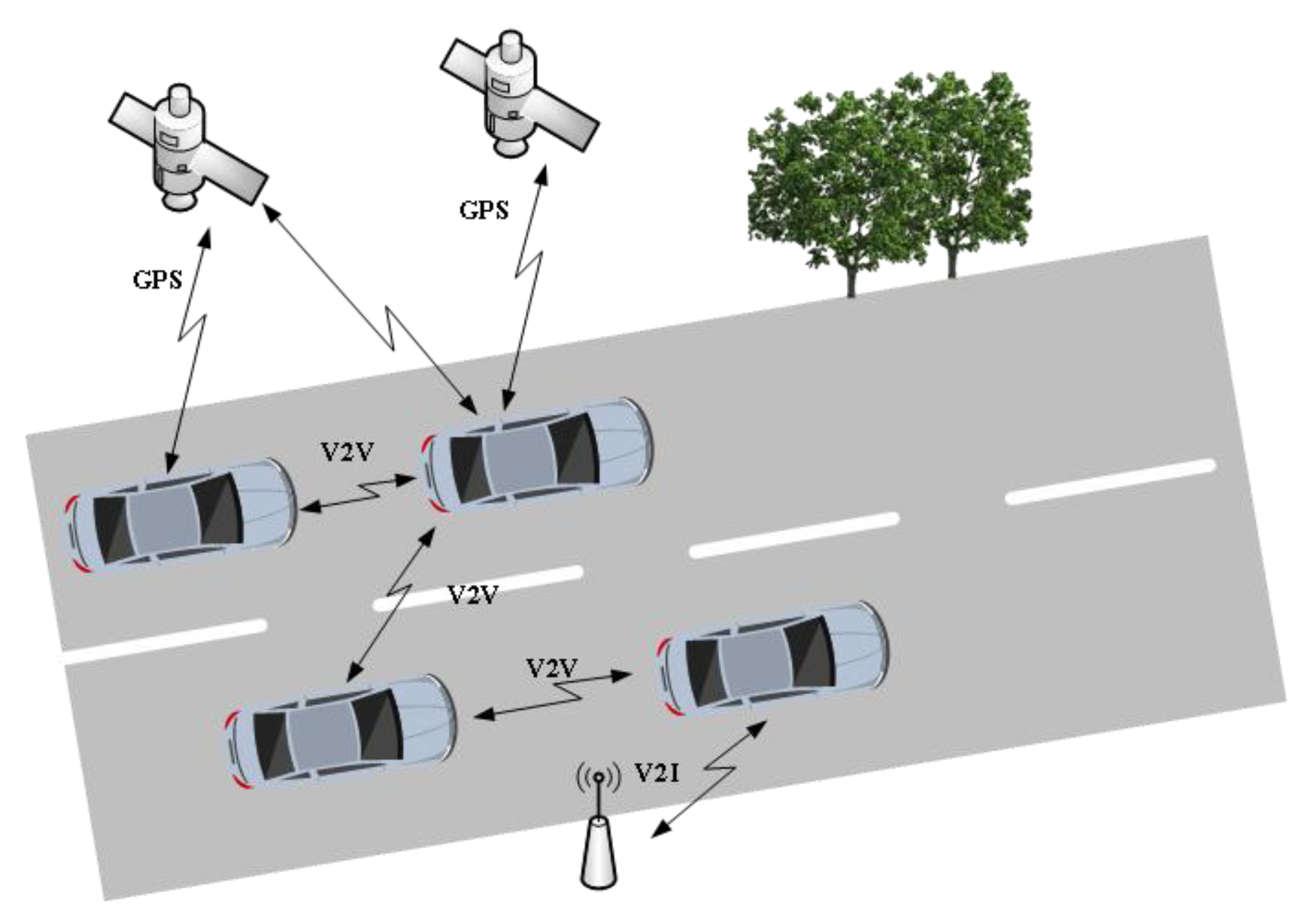
3.3. Collaborative Positioning
4. Vehicle Communication
4.1. Communication Security

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Frequency Band | Data Security and Privacy Threats | Security Research Methods Addressed |
|---|---|---|---|
| The internet of vehicles signature phase | Calculation consumes large resources, dynamic changes of user attributes, diverse data types, etc. | Fake attack, witch attack, location attack, mission related attack | Homomorphism encryption, fuzzy generalization |
| Data collection and transmission stage of internet of vehicles users | Network topology changes frequently, data rights and user permissions are complex | Middle node attack, witch attack, position attack, background knowledge attack | Secure multi-party computing, homomorphic encryption |
| Cloud platform processing data stage | Easy to be vulnerable to malicious attacks, the security and benefit game between users, the vehicle parties to seek benefit maximization, highly centralized | Plot attack, time association attack | Game theory method, blockchain technology |
4.2. Control Strategy for Communication Delay
5. Test Method and Evaluation
5.1. Real Vehicle Road Test Platform
5.2. Virtual Test Platform
5.3. Test Method and Evaluation
6. Expectations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, W.; Xia, F.; Nie, H.; Chen, Z.; Gong, Z.; Kong, X.; Wei, W. Vehicle trajectory clustering based on dynamic representation learning of internet of vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3567–3576. [Google Scholar] [CrossRef]
- Wang, B.Y.; Han, Y.; Liu, F.; Hu, H.; Zhao, R.; Fang, H. Intelligent Distribution Framework and Algorithms for Connected Logistics Vehicles. IEEE Access 2020, 8, 204241–204255. [Google Scholar] [CrossRef]
- Zhao, J.; Song, D.; Zhu, B.; Liu, B.; Chen, Z.; Zhang, P. Intelligent car following control strategy based on the hybrid drive of self-learning and supervised learning. J. Highw. China 2022, 35, 55–65. [Google Scholar]
- Autonomous Driving Working Committee of China Highway Society. Development Trend and Suggestions of vehicle-road collaborative autonomous driving. Intell. Connect. Car 2019, 4, 50–60.
- Daganzo, C.; Lehe, L. Traffic flow on signalized streets. Transport. Res. B-Meth. 2016, 90, 56–69. [Google Scholar] [CrossRef]
- Evers, R.; Proost, S. Optimizing intersections. Transport. Res. B-Meth. 2015, 71, 100–119. [Google Scholar] [CrossRef] [Green Version]
- Wong, S.; Sze, N.; Li, Y. Contributory factors to traffic crashes at signalized intersections in Hong Kong. Accid. Anal. Prev. 2007, 39, 1107–1113. [Google Scholar] [CrossRef] [PubMed]
- Xu, Q.J.; Fu, R.; Wu, F.W.; Wang, B.Y. Roadside Estimation of a Vehicle’s Center of Gravity Height Based on an Improved Single-Stage Detection Algorithm and Regression Prediction Technology. IEEE Sens. J. 2021, 21, 24520–24530. [Google Scholar] [CrossRef]
- Samuel, W. D3.1. Component Specification for the Overall Architecture; European Commission: Brussels, Belgium, 2015. [Google Scholar]
- Tan, H.; Huang, J. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints. IEEE Trans. Intell. Transp. Syst. 2016, 7, 415–428. [Google Scholar] [CrossRef]
- Yu, M. News: Japanese trucks are at 80 kilometers per hour. Commer. Car News 2013, 10, 20. [Google Scholar]
- Shim, J.; Park, S.H.; Chung, S.; Jang, K. Enforcement avoidance behavior near automated speed enforcement areas in korean expressways. Accid. Anal. Prev. 2015, 80, 57–66. [Google Scholar] [CrossRef] [PubMed]
- De, P.; Daniels, S.; Brijs, T.; Hermans, e.; Wets, E. Behavioural effects of fixed speed cameras on motorways: Overall improved speed compliance or kangaroo jumps? Accid. Anal. Prev. 2014, 73, 132–140. [Google Scholar]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred Reporting Items for Systematic Reviews and Meta-analyses: The PRISMA Statement. Ann. Intern. Med. 2009, 151, 264–269. [Google Scholar] [CrossRef] [Green Version]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA Statement for Reporting Systematic Reviews and Meta-analyses of Studies that evaluation. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [CrossRef]
- Jiang, G.; Liu, H.; Zhou, Y.; Fu, C.Y. Research status and development trend of overspeed behavior interventions. J. Highw. China 2020, 33, 1–31. [Google Scholar]
- Biswas, S.; Tatchikou, R.; Dion, F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Commun. Mag. 2006, 44, 74–82. [Google Scholar] [CrossRef]
- Rangesh, A.; Trivedl, M. No blind spots: Full-surround multi-object tracking for autonomous vehicles using cameras and lidars. IEEE Trans. Intell. Veh. 2019, 4, 588–599. [Google Scholar] [CrossRef] [Green Version]
- Horowitz, R.; Varaiya, P. Control design of an automated highway system. Proc. IEEE 2000, 88, 913–925. [Google Scholar] [CrossRef]
- Shladover, S. PATH at 20—History and major milestones. IEEE Trans. Intell. Transp. Syst. 2007, 8, 584–592. [Google Scholar] [CrossRef]
- Tsugawa, S.; Jeschke, S.; Shladover, S. A Review of Truck Platooning Projects for Energy Savings. IEEE Trans. Intell. Veh. 2016, 1, 68–77. [Google Scholar] [CrossRef]
- Hult, R.; Sancar, F.E.; Jalalmaab, M.; Vijayan, A.; Severinson, A.; Di Vaio, M.; Falcone, P.; Fidan, B.; Santini, S. Design and Experimental Validation of a Cooperative Driving Control Architecture for the Grand Cooperative Driving Challenge 2016. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1290–1301. [Google Scholar] [CrossRef]
- Ploeg, J.; Semsar-Kazerooni, E.; Medina, A.; de Jongh, J.F.C.M.; van de Sluis, J.; Voronov, A.; Englund, C.; Bril, R.J.; Salunkhe, H.; Arrue, A.; et al. Cooperative Automated Maneuvering at the 2016 Grand Cooperative Driving Challenge. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1213–1226. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Li, S.; Wang, J.; Cao, D.P.; Li, K.Q. Stability and Scalability of Homogeneous Vehicular Platoon: Study on the Influence of Information Flow Topologies. IEEE Trans. Intell. Transp. Syst. 2016, 17, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Bian, Y.; Zheng, Y.; Ren, W.; Li, S.; Wang, J.Q.; Li, K.Q. Reducing time headway for platooning of connected vehicles via V2V communication. Transport. Res. C-Emer. 2019, 102, 87–105. [Google Scholar] [CrossRef]
- Yanakiev, D.; Kanellakopoulos, I. Nonlinear spacing policies for automated heavy-duty vehicles. IEEE Trans. Veh. Technol. 1998, 47, 1365–1377. [Google Scholar] [CrossRef]
- Browand, F.; Mcarthur, J.; Radovich, C. Fuel Saving Achieved in the Field of Two Tandems Trucks. In California PATH Research Report UCB-ITS-PRR-2004-20; eScholarship: Berkeley, CA, USA, 2004. [Google Scholar]
- Memon, Z.A.; Unar, M.A.; Pathan, D.M. Parametric Study of Nonlinear Adaptive Cruise Control for a Road Vehicle Model by MPC. Mehran Univ. Res. J. En. 2016, 31, 301–314. [Google Scholar]
- Pan, C.; Huang, A.; Chen, L. A review of the development trend of adaptive cruise control for ecological driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 1931–1948. [Google Scholar] [CrossRef]
- Calvert, S.C.; van Arem, B. Cooperative adaptive cruise control and intelligent traffic signal interaction: A field operational test with platooning on a suburban arterial in real traffic. IET Intell. Transp. Syst. 2020, 14, 1665–1672. [Google Scholar] [CrossRef]
- Zhu, Y.H.; Zhao, D.B.; Zhong, C.G. Adaptive Optimal Control of Heterogeneous CACC System with Uncertain Dynamics. IEEE Trans. Control. Syst. Technol. 2019, 27, 1772–1779. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, K. A distributionally robust stochastic optimization-based model predictive control with distributionally robust chance constraints for cooperative adaptive cruise control under uncertain traffic conditions. Transp. Res. Part B 2020, 138, 144–178. [Google Scholar] [CrossRef]
- Yang, L.; Mao, J.; Liu, J. An Adaptive Cruise Control Method Based on Improved Variable Time Headway Strategy and Particle Swarm Optimization Algorithm. IEEE Access 2020, 8, 168333–168343. [Google Scholar] [CrossRef]
- Chen, J.Z.; Zhou, Y.; Liang, H. Effects of ACC and CACC vehicles on traffic flow based on an improved variable time headway spacing strategy. IET Intell. Transp. Syst. 2019, 13, 1365–1373. [Google Scholar] [CrossRef]
- Chen, J.Z.; Liang, H.; Lv, Z.K. Connected Automated Vehicle Platoon Control with Input Saturation and Variable Time Headway Strategy. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4929–4940. [Google Scholar] [CrossRef]
- Isaac, O.; Lagouge, K.; Modestus, O.; Alessandro, S. Comparative Traffic Flow Prediction of a Heuristic ANN Model and a Hybrid ANN-PSO Model in the Traffic Flow Modelling of Vehicles at a Four-Way Signalized Road Intersection. Sustainability 2021, 13, 10704. [Google Scholar]
- Myungeun, E.; Byung-In, K. The traffic signal control problem for intersections: A review. Eur. Transp. Res. Rev. 2020, 12, 50. [Google Scholar]
- Dresner, K.; Stone, P. A multiagent approach to autonomous intersection management. J. Artif. Intell. Res. 2018, 31, 591–656. [Google Scholar] [CrossRef] [Green Version]
- Rosolia, U.; Bruyne, D.; Alleyne, A.G. Autonomous vehicle control: A nonconvex approach for obstacle avoidance. IEEE Trans. Control. Syst. Technol. 2016, 25, 469–484. [Google Scholar] [CrossRef]
- Galceran, E.; Cunningham, A.G.; Eustice, R.M.; Olson, E. Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction: Theory and experiment. Auton. Robot. 2017, 41, 1367–1382. [Google Scholar] [CrossRef]
- Chen, L.; Englund, C. Cooperative intersection management: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 17, 570–586. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D.; Patel, R. Paradoxes of reservation-based intersection controls in traffic networks. Transp. Res. Part A Policy Pract. 2016, 90, 14–25. [Google Scholar] [CrossRef]
- Jablonský, J. Benchmarks for current linear and mixed integer optimization solvers. Acta Univ. Agric. Silvic. Mendel. Brun. 2015, 63, 1923–1928. [Google Scholar] [CrossRef]
- Zhou, Y.; Ahn, S.; Chitturi, M.; Noyce, D.A. Rolling horizon stochastic optimal control strategy for ACC and CACC under uncertainty. Transp. Res. Part C Emerg. Technol. 2017, 83, 61–76. [Google Scholar] [CrossRef]
- Li, Z.; Pourmehrab, M.; Elefteriadou, L.; Ranka, S. Intersection control optimization for automated vehicles using genetic algorithm. J. Transp. Eng. Part A Syst. 2018, 144, 04018074. [Google Scholar] [CrossRef]
- Wu, J.; Abbas-Turki, A.; Moudni, A.E. Cooperative driving: An ant colony system for autonomous intersection management. Appl. Intell. 2012, 37, 207–222. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C Emerg. Technol. 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Yang, H.; Jin, W.L. Instantaneous communication capacities of vehicular ad hoc networks. Transp. Res. Part C Emerg. Technol. 2016, 72, 325–341. [Google Scholar] [CrossRef]
- Altché, F.; Fortelle, D.L. Analysis of optimal solutions to robot coordination problems to improve autonomous intersection management policies. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016. [Google Scholar]
- Meng, Y.; Li, L.; Wang, F.Y.; Li, K.Q.; Li, Z.H. Analysis of cooperative driving strategies for nonsignalized intersections. IEEE Trans. Veh. Technol. 2017, 67, 2900–2911. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. A multiclass cell transmission model for shared human and autonomous vehicle roads. Transp. Res. Part C Emerg. Technol. 2016, 62, 103–116. [Google Scholar] [CrossRef]
- Tachet, R.; Santi, P.; Sobolevsky, S.; Reyes-Castro, L.I.; Frazzoli, E.; Helbing, D.; Ratti, C. Revisiting street intersections using slot-based systems. PLoS ONE 2016, 11, e0149607. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Lin, C.W.; Shiraishi, S.; Tomizuka, M. Distributed conflict resolution for connected autonomous vehicles. IEEE Trans. Intell. Veh. 2017, 3, 18–29. [Google Scholar] [CrossRef]
- Mirheli, A.; Hajibabai, L.; Hajbabaie, A. Development of a signal-head-free intersection control logic in a fully connected and autonomous vehicle environment. Transp. Res. Part C Emerg. Technol. 2018, 92, 412–425. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A. Automated and cooperative vehicle merging at highway on ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 780–789. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Malikopoulos, A.; Cassandras, C. Optimal control and coordination of connected and automated vehicles at urban traffic intersections. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Malikopoulos, A.; Cassandras, C.; Zhang, Y.J. A decentralized energy-optimal control framework for connected automated vehicles at non-signalized crossing. Automatica 2018, 93, 244–256. [Google Scholar] [CrossRef] [Green Version]
- Bichiou, Y.; Rakha, H.A. Real-time optimal intersection control system for automated/ cooperative vehicles. Int. J. Transp. Sci. Technol. 2019, 8, 1–12. [Google Scholar] [CrossRef]
- Guo, Y.S.; Xu, Q.J.; Su, Y.Q.; Jiang, S.Y. Visibility detection based on the recognition of the preceding vehicle’s taillight signals. IEEE Access 2020, 8, 206105–206117. [Google Scholar] [CrossRef]
- Hausknecht, M.; Au, T.; Stone, P. Autonomous intersection management: Multi-intersection optimization. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Huang, S.; Sadek, A.; Zhao, Y. Assessing the mobility and environmental benefits of reservation-based intelligent intersections using an integrated simulator. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1201–1214. [Google Scholar] [CrossRef]
- Chu, K.F.; Lam, A.; Li, V. Dynamic lane reversal routing and scheduling for connected autonomous vehicles. In Proceedings of the 2017 International Smart Cities Conference (ISC2), Wuxi, China, 14–17 September 2017. [Google Scholar]
- Milanes, V.; Perez, J.; Onieva, E.; Gonzalez, C. Controller for urban intersections based on wireless communications and fuzzy logic. IEEE Trans. Intell. Transp. Syst. 2010, 11, 243–248. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Kamel, A.E. V2X-based decentralized cooperative adaptive cruise control in the vicinity of intersections. IEEE Trans. Intell. Transp. Syst. 2016, 17, 644–658. [Google Scholar] [CrossRef]
- Ying, Z.B.; Ma, M.; Yi, L. Bavpm: Practical autonomous vehicle platoon management supported by blockchain technique. In Proceedings of the 2019 4th International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 5–7 September 2019; pp. 256–260. [Google Scholar]
- Cai, M.C.; Xu, Q.; Li, K.; Wang, J.Q. Multi-lane formation assignment and control for connected vehicles. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1968–1973. [Google Scholar]
- Gao, W.; Wu, C.; Zhong, L.; Yau, K.L.A. Communication Resources Management Based on Spectrum Sensing for Vehicle Platooning. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Won, M. L-Platooning: A protocol for managing a long platoon with DSRC. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Fida, N.A.; Ahmad, N.; Cao, Y.; Jan, M.A.; Ali, G. An improved multiple manoeuver management protocol for platoon mobility in vehicular ad hoc networks. IET Intell. Transp. Syst. 2021, 15, 886–901. [Google Scholar] [CrossRef]
- Santini, S.; Salvi, A.; Valente, A.S.; Pescapè, A.; Segata, M.; Cigno, R.L. Platooning maneuvers in vehicular networks: A distributed and consensus-based approach. IEEE Trans. Intell. Veh. 2018, 4, 59–72. [Google Scholar] [CrossRef]
- Liu, B.; Ding, Z.; Lv, C. Platoon control of connected autonomous vehicles: A distributed reinforcement learning method by consensus. IFAC-Pap. OnLine 2020, 53, 15241–15246. [Google Scholar] [CrossRef]
- Li, L.H.; Gan, J.; Qu, X.; Mao, P.P.; Yi, Z.W.; Ran, B. A novel graph and safety potential field theory-based vehicle platoon formation and optimization method. Appl. Sci. 2021, 11, 958. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S.; Lin, H.; Wang, C. Platoon formation control with prescribed performance guarantees for USVs. IEEE Trans. Ind. Electron. 2017, 65, 4237–4246. [Google Scholar] [CrossRef]
- Orujov, F.; Maskeliunas, R.; Damasevicius, R.; Wei, W.; Li, Y. Smartphone based intelligent indoor positioning using fuzzy logic. Future Gener. Comput. Syst. 2018, 89, 335–348. [Google Scholar] [CrossRef]
- Liu, J.; Cai, B.; Wang, J. Cooperative Localization of Connected Vehicles: Integrating GNSS With DSRC Using a Robust Cubature Kalman Filter. IEEE Trans. Intell. Transp. Syst. 2017, 18, 111–2125. [Google Scholar] [CrossRef]
- Zeng, Q.; Liu, J.; Hu, Q.; Yang, D. The Beidou system and GNSS multi-constellation combination navigation performance research. Glob. Position. 2011, 36, 53–57. [Google Scholar]
- Odolinski, R.; Teunissen, P.J.G. Low-cost, high-precision, single-frequency GPS–BDS RTK positioning. GPS Solut. 2017, 21, 1315–1330. [Google Scholar] [CrossRef]
- Yang, L.; Li, B.; Lou, L. Effect of different tropospheric models on the GPS localization results. Surv. Mapp. Bull. 2009, 4, 9–11. [Google Scholar]
- Milford, M.J.; Wyeth, G.F. Single camera vision-only SLAM on a suburban road network. In Proceedings of the Robotics and Automation IEEE, Pasadena, CA, USA, 19–23 May 2008; pp. 3684–3689. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- MPalzkill, T.; Ledermann, A. Verl. Anticipation-Preprocessing for Object Pose Detection. In Proceedings of the ISR 2010 and ROBOTIK 2010, Munich, Germany, 7–9 June 2010; pp. 1–6. [Google Scholar]
- Brand, C.; Schuster, M.J.; Hirschmüller, H.; Suppa, M. Submap matching for stereo-vision based indoor/outdoor slam. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5670–5677. [Google Scholar]
- Wang, L.; Zhang, Y.; Wang, J. Map-based localization method for autonomous vehicles using 3D-LIDAR. IFAC-Pap. 2017, 50, 276–281. [Google Scholar]
- Javanmardi, E.; Gu, Y.; Javanmardi, M.; Kamijo, S. Autonomous vehicle self-localization based on abstract map and multi-channel Li DAR in urban area. IATSS Res. 2019, 43, 1–13. [Google Scholar] [CrossRef]
- Magnusson, M.; Andreasson, H.; Nüchter, A.; Lilienthal, A.J. Automatic appearance-based loop detection from three-dimensional laser data using the normal distributions transform. J. Field Robot. 2009, 26, 892–914. [Google Scholar] [CrossRef] [Green Version]
- Fontana, R.J. Recent system applications of short-pulse ultra-wideband (UWB) technology. IEEE Trans. Microw. Theory Tech. 2004, 52, 2087–2104. [Google Scholar] [CrossRef]
- Parwari, N.; Joshua, N.A.; Kyperountas, S. Locating the Nodes-Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–59. [Google Scholar]
- Oppermann, I.; Yu, K.; Montillet, J.P.; Rabbachin, A.; Cheong, P. UWB Location and Tracking for Wireless Embedded Networks. Signal Process. 2006, 86, 2153–2171. [Google Scholar]
- Rohani, M.; Gingras, D.; Vigneron, V.; Gruyer, D. A new decentralized Bayesian approach for cooperative vehicle localization based on fusion of GPS and inter-vehicle distance measurements. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo, Las Vegas, NV, USA, 2–6 December 2013. [Google Scholar]
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit cooperative positioning in vehicular networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3980. [Google Scholar] [CrossRef] [Green Version]
- Ansari, K.; Feng, Y.; Tang, M. A runtime integrity monitoring framework for real-time relative positioning systems based on GPS and DSRC. IEEE Trans. Intell. Transp. Syst. 2015, 16, 980–992. [Google Scholar]
- Xiong, J.; Cheong, J.W.; Xiong, Z.; Dempster, A.G.; Tian, S.; Wang, R. Integrity for multi-sensor cooperative positioning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 792–807. [Google Scholar] [CrossRef]
- Liu, J.; Tan, S.; Cai, B.; Wang, J. Based on Vehicle-Road information interaction. Transportation System Engineering and Information. 2022. Available online: https://kns.cnki.net/kcms/detail/11.4520.U.20220811.1444.008.html (accessed on 7 August 2022).
- Yao, H.; Feng, F.; Chen, J. Practical Application of Vehicle⁃Road Cooperation Based on High Precision Map and Multi⁃sensor Fusion Positioning. J. Geomat. 2022, 47, 65–69. [Google Scholar]
- Liu, S.Y.; He, D.Z.; Xu, Y.; Zhang, C.; Sun, S.B.; Ru, D.Y. Adaptive Vehicle Cooperative Positioning System with Uncertain GPS Visibility and Neural Network-based Improved Approach. In Proceedings of the IEEE/CIC International Conference on Communications in China (ICCC), Beijing, China, 16–18 August 2018. [Google Scholar]
- Hu, L.; Ni, Q. IoT-Driven Automated Object Detection Algorithm for Urban Surveillance Systems in Smart Cities. IEEE Internet Things 2018, 5, 747–754. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; He, J.; Wang, R.; Wang, X. Relative positioning coordinate estimation algorithm for Internet of vehicles independent of precise initial coordinates. J. Comput. Sci. 2017, 40, 1583–1599. [Google Scholar]
- Han, Z.; Guo, K.; Xie, L.; Lin, Z.Y. Integrated Relative Localization & Leader-Follower Formation Control. IEEE Trans. Autom. Control. 2019, 64, 20–34. [Google Scholar]
- Jia, T.; Wang, H.; Shen, X.; Jiang, Z.; He, K. Target localization based on structured total least squares with hybrid TDOA-AOA measurements. Signal Process. 2018, 143, 211–221. [Google Scholar] [CrossRef]
- Qu, X.; Xie, L.; Tan, W. Iterative Constrained Weighted Least Squares Source Localization Using TDOA and FDOA Measurements. IEEE Trans. Signal Proces. 2017, 15, 3990–4003. [Google Scholar] [CrossRef]
- Jiang, X. Research on Communication Performance Optimization and Control Method of Vehicle Belt C-V2X System; Jiangsu University: Jiangsu, China, 2021. [Google Scholar]
- Jelinek, J. Simulation and Analysis of Information Dissemination in Vehicular Ad-Hoc Networks. In Proceedings of the 10th International Conference on Advanced Computer Information Technologies (ACIT), Deggendorf, Germany, 16–18 September 2020. [Google Scholar]
- Singh, J.; Singh, K. Advanced VANET Information Dissemination Scheme Using Fuzzy Logic. In Proceedings of the IEEE Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018. [Google Scholar]
- Zhao, H.T.; Zhang, M.K.; Gao, K.Q.; Mao, T.Q.; Zhu, H.B. A Multi-channel Cooperative Demand-Aware Media Access Control Scheme in Vehicular Ad-Hoc Network. Wirel. Pers. Commun. 2019, 104, 325–337. [Google Scholar] [CrossRef]
- Wei, W.; Liu, S.; Li, W.; Du, D.Z. Fractal Intelligent Privacy Protection in Online Social Network Using Attribute-Based Encryption Schemes. IEEE Trans. Comput. Soc. Syst. 2018, 6, 189. [Google Scholar] [CrossRef]
- Damaševičius, R.; Woźniak, M.; Alarcon-Aquino, V.; Ganchev, I.; Wei, W. Advances in security and privacy of multimodal interfaces. J. Univers. Comput. Sci. 2018, 24, 338–340. [Google Scholar]
- Vijayakumar, P.; Azees, M.; Kannan, A.; Deborah, L.J. Dual authentication and key management techniques for secure data transmission in vehicular ad hoc networks. IEEE Trans. Intell. Transp. 2016, 17, 1015–1028. [Google Scholar] [CrossRef]
- Vijayakumar, P.; Azees, M.; Chang, V.; Deborah, J.; Balusamy, B. Computationally efficient privacy preserving authentication and key distribution techniques for vehicular ad hoc networks. Clust. Comput. 2017, 20, 2439–2450. [Google Scholar] [CrossRef]
- Ma, W.; Cao, Y.; Wei, W.; Hei, X.; Ma, J. Energy-efficient collaborative communication for optimization cluster heads selection based on genetic algorithms inwireless sensor networks. Int. J. Distrib. Sens. N. 2015, 11, 396121. [Google Scholar] [CrossRef]
- Kang, J.; Yu, R.; Huang, X.; Zhang, Y. Privacy-preserved pseudonym scheme for fog computing supported Internet of Vehicles. IEEE Trans. Intell. Transp. 2018, 19, 2627–2637. [Google Scholar] [CrossRef] [Green Version]
- Hubaux, J.P.; Capkun, S.; Luo, J. The security and privacy of smart vehicles. IEEE Secur. Priv. 2004, 2, 49–55. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Yu, F.; Zhang, P.; Xie, W.X.; Peng, X. A survey on secure computation based on homomorphic encryption in vehicular Ad Hoc networks. Sensors 2020, 20, 4253. [Google Scholar] [CrossRef]
- Liu, Y.; Lang, X.; Pei, S. Encryption algorithm based on ECC and homomorphic encryption. Comput. Eng. Des. 2020, 41, 1243–1247. [Google Scholar]
- Wei, X.; Lu, D. Forward secure aggregated signature scheme based on Chinese Remainder Theorem. Comput. Technol. Dev. 2021, 31, 137–141. [Google Scholar]
- Abbasian Dehkordi, S.; Farajzadeh, K.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K.; Dehkordi, M.A. A survey on data aggregation techniques in IoT sensor networks. Wirel. Netw. 2020, 26, 1243–1263. [Google Scholar] [CrossRef]
- Boudia, O.; Senouci, M. An efficient and secure multidimensional data aggregation for fog computing-based smart grid. IEEE Internet Things J. 2020, 8, 6143–6153. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, J.; Chen, Y.; Cao, Z.F.; Dong, X.; Choo, K.K.R. PADP: Efficient privacypreserving data aggregation and dynamic pricing for vehicle to grid networks. IEEE Internet Things J. 2020, 8, 7863–7873. [Google Scholar] [CrossRef]
- Xie, Y.; Xu, F.; Li, D.; Nie, Y. Efficient message authentication scheme with conditional privacy-preserving and signature aggregation for vehicular cloud network. Wirel. Commun. Mob. Comput. 2018, 2018, 1875489. [Google Scholar] [CrossRef]
- Lai, Y.; Zhang, L.; Yang, F.; Zheng, L.; Wang, T.; Li, K.C. CASQ: Adaptive and cloudassisted query processing in vehicular sensor networks. Future Gener. Comput. Syst. 2019, 94, 237–249. [Google Scholar] [CrossRef]
- Liu, B.; Wang, Z.; Qin, J.; Jiang, Y.; Chen, X.H.; Wang, E.S.; Xiong, S.W. A novel framework for message dissemination with consideration of destination prediction in VFC. Neural Comput. Appl. 2021, 1–11. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, L.; Li, J. Review of Privacy Protection Data Aggregation Research based on Internet of Vehicles. Comput. Appl. Res. 2022, 39, 1–12. [Google Scholar]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J. Connected roads of the future: Use cases, requirements, and design considerations for vehicle-to-everything communications. IEEE Veh. Technol. Mag. 2018, 13, 110–123. [Google Scholar] [CrossRef]
- Abdulkareem, K.H.; Gunasekaran, S.; Al-Mhiqani, M.N.; Mutlag, A.A.; Mostafa, S.A.; Ali, N.S.; Ibrahim, D.A. A Review of Fog Computing and Machine Learning: Concepts, Applications, Challenges, and Open Issues. IEEE Access 2019, 7, 153123–153140. [Google Scholar] [CrossRef]
- Otomo, M.; Sato, G.; Shibata, Y. In-vehicle Cloudlet Computing System for Disaster Information Based on Delay Tolerant Network Protocol. In Proceedings of the 31st IEEE International Conference on Advanced Information Networking and Applications (IEEE AINA), Taipei, Taiwan, 27–29 March 2017. [Google Scholar]
- Zhao, H.; Zhu, Y.; Tang, J.; Han, Z.; Aujla, G.S. Message-Sensing Classified Processing and Transmission Scheme Based on Mobile Edge Computing in the Internet of Vehicles. Softw. Pract. Exper. 2020, 51, 2501–2518. [Google Scholar] [CrossRef]
- Zeng, T.; Semiari, O.; Saad, W.; Bennis, M. Joint Communication and Control for Wireless Autonomous Vehicular Platoon Systems. IEEE Trans. Commun. 2019, 67, 7907–7922. [Google Scholar] [CrossRef] [Green Version]
- Bahreini, M.; Zarei, J.; Razavi–Far, R.; Saif, M. Robust Finite-Time Stochastic Stabilization and Fault-Tolerant Control for Uncertain Networked Control Systems Considering Random Delays and Probabilistic Actuator Faults. Trans. Inst. Meas. Control. 2019, 41, 3550–3561. [Google Scholar] [CrossRef]
- Tang, Y.; Peng, C.; Yin, S.; Qiu, J.B.; Gao, H.J.; Kaynak, O. Robust Model Predictive Control Under Saturations and Packet Dropouts With Application to Networked Flotation Processes. IEEE Trans. Autom. Sci. Eng. 2014, 11, 1056–1064. [Google Scholar] [CrossRef]
- Zhang, L.; Xie, W.; Liu, J. Robust Control of Saturating Systems with Markovian Packet Dropouts under Distributed MPC. ISA Trans. 2019, 85, 49–59. [Google Scholar] [CrossRef]
- Li, C.; Jing, H.; Wang, R.; Chen, N. Vehicle Lateral Motion Regulation under Unreliable Communication Links Based on Robust H∞ Output-Feedback Control Schema. Mech. Syst. Signal Process. 2018, 104, 171–187. [Google Scholar] [CrossRef]
- Yin, C.; Gao, J.; Sun, Q. Enhanced PID Controllers Design Based on Modified Smith Predictor Control for Unstable Process with Time Delay. Math. Probl. Eng. 2014, 2014, 521460. [Google Scholar] [CrossRef] [Green Version]
- Xing, H.; Ploeg, J.; Nijmeijer, H. Smith Predictor Compensating for Vehicle Actuator Delays in Cooperative ACC Systems. IEEE Trans. Veh. Technol. 2019, 68, 1106–1115. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Y.; Nie, Y.; Wei, W.; Lloret, J.; Song, H.B. CASMOC: A novel complex alliance strategy with multi-objective optimization of coverage in wireless sensor networks. Wirel. Netw. 2017, 23, 1201–1222. [Google Scholar] [CrossRef]
- Wang, X.; Han, Y.; Wang, C.; Zhao, Q.; Chen, X.; Chen, M. In-Edge AI: Intelligentizing mobile edge computing, caching and communication by federated learning. IEEE Netw. 2019, 33, 156–165. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Liang, Y.; Yuan, J.; Yao, Q.; Zhang, J. Distributed blockchain-based trusted multi-domain collaboration for mobile edge computing in 5G and beyond. IEEE Trans. Ind. Inform. 2020, 16, 7094–7104. [Google Scholar] [CrossRef]
- Guo, C.; Liang, L.; Li, G. Resource Allocation for Low-Latency Vehicular Communications: An Effective Capacity Perspective. IEEE J. Sel. Area. Comm. 2019, 37, 905–917. [Google Scholar] [CrossRef]
- Oliveira, D.; Manera, L.T.; Luz, D. Development of a Smart Traffic Light Control System with Real-Time Monitoring. IEEE Internet Things 2021, 8, 3384–3393. [Google Scholar] [CrossRef]
- Zhang, J.; Letaief, K.B. Mobile edge intelligence and computing for the internet of vehicles. Proc. IEEE 2019, 108, 246–261. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Tian, B.; Xu, Z. A local traffic characteristic based dynamic gains tuning algorithm for cooperative adaptive cruise control considering wireless communication delay. Transp. Res. Part C 2022, 142, 103766. [Google Scholar] [CrossRef]
- Leopoldo, V.; Luis, J.; Marco, G.A. Dynamic predictor-based adaptive cruise control. J. Frankl. Inst. 2022, 359, 6123–6141. [Google Scholar]
- Wang, C.J.; Gong, S.Y.; Peeta, S. Cooperative adaptive cruise control for connected autonomous vehicles by factoring communication-relatedconstraints. Transp. Res. Part C-Emerg. Technol. 2020, 113, 124–145. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Hua, X.; Zhao, D. Safety impact of cooperative adaptive cruise control vehicles’ degradation under spatial continuous communication interruption. IET Intell. Transp. Syst. 2021, 16, 309–331. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, W. A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure. Sensors 2021, 21, 6158. [Google Scholar] [CrossRef]
- Petrillo, A.; Pescape, A.; Santini, S. A Secure Adaptive Control for Cooperative Driving of Autonomous Connected Vehicles in the Presence of Heterogeneous Communication Delays and Cyberattacks. IEEE Trans. Cybern. 2020, 51, 1134–1149. [Google Scholar] [CrossRef]
- Fiengo, G.; Lui, D.G.; Tufo, M. Distributed Robust PID Control For Leader Tracking in Uncertain Connected Ground Vehicles With V2V Communication Delay. IEEE-ASME Trans. Mechatron. 2019, 24, 1153–1165. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Platooning with IVC-Enabled autonomous vehicles:strategies to mitigate communication delays, improve safety and traffic flow. Intell. Transp. Syst. IEEE Trans. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Ge, J.I.; Orosz, G. Dynamics of connected vehicle systems with delayed acceleration feedback. Transp. Res. 2014, 46, 46–64. [Google Scholar] [CrossRef]
- Di Bernardo, M.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time- varying heterogeneous communication delays. IEEE Trans. Intell. Transp. Syst. 2015, 16, 102–112. [Google Scholar] [CrossRef]
- Zhou, Y.; Ahn, S. Robust local and string stability for a decentralized car following control strategy for connected automated vehicles. Transp. Res. Part B: Methodol. 2019, 125, 175–196. [Google Scholar] [CrossRef]
- Chehardoli, H.; Homaeinezhad, M.R. Third-order safe consensus of heterogeneous vehicular platoons with MPF network topology:Constant time headway strategy. Proc. Inst. Mech. Eng. J. Automob. Eng. 2018, 232, 1402–1413. [Google Scholar] [CrossRef]
- Chehardoli, H.; Ghasemi, A. Adaptive centralized/ decentralized control and identification of 1- D heterogeneous vehicular platoons based on constant time headway policy. Intell. Transp. Syst. IEEE Trans. 2018, 19, 3376–3386. [Google Scholar] [CrossRef]
- Hossein, C.; Ali, G. Formation control of longitudinal vehicular platoons under generic network topology with heterogeneous time delays. J. Vib. Control. 2018, 25, 655–665. [Google Scholar]
- Asadi, A.; Müller, S.; Sim, G.; Klein, A.; Hollick, M. FML: Fast machine learning for 5G mmWave vehicular communications. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM), Honolulu, HI, USA, 16–19 April 2018. [Google Scholar]
- Samarakoon, S.; Bennis, M.; Saad, W. Distributed federated learning for ultra-reliable low-latency vehicular communications. IEEE Trans. Commun. 2019, 68, 1146–1159. [Google Scholar] [CrossRef] [Green Version]
- Gyawali, S.; Qian, Y. Misbehavior Detection using Machine Learning in Vehicular Communication Networks. In Proceedings of the IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Hasselt, H.; Guez, A.; Silver, D. Deep Reinforcement Learning with Double Q-learning. In Proceedings of the 30th Association-for-the-Advancement-of-Artificial-Intelligence (AAAI) Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016. [Google Scholar]
- Zhao, H.; Mao, T.; Duan, J.; Wang, Y.F.; Zhu, H.B. FMCNN: A Factorization Machine Combined Neural Network for Driving Safety Prediction in Vehicular Communication. IEEE Access 2019, 7, 11698–11706. [Google Scholar] [CrossRef]
- Liu, T.Y.; Yu, Z.P.; Xiong, L.; Zhang, P. Development status and construction suggestions of intelligent Connected Vehicle Test ground. Auto. Technol. 2017, 1, 7–11. [Google Scholar]
- Zhang, W.; Li, X.H.; Wu, X.Y.; Tang, F.M.; Guo, P.; He, J. Research status of autonomous driving simulation technology. Auto Electric. 2019, 8, 13–15. [Google Scholar]
- Ministry of Industry and Information Technology; Ministry of Public Security; Ministry of Transport. Notice on the Issuance of the Management Code for Road Testing and Demonstration Application of Intelligent Connected Vehicles (Trial): The Ministry of Industry and Information Technology, No.97,2021. 21 July 2021. Available online: https://baike.baidu.com/item/Managementstandardforroadtestanddemonstrationapplicationofintelligentandconnectedvehicles/55766374?fr=aladdin (accessed on 1 January 2022).
- Changsha Municipal Bureau of Industry and Information Technology. Notice on the issuance of the Implementation Rules of Road Test Management of Intelligent and Connected Vehicle in Changsha City (Trial) V3.0: Changgongxin Digital Issue No. 77,2020. 18 June 2020. Available online: https://baike.baidu.com/item/ImplementationRulesforRoadTestofIntelligentandConnectedVehiclesinChangshaCity(Trial)/23790739?fr=aladdin (accessed on 14 June 2022).
- Varga, B.O.; Burnete, N.; Iclodean, C. Validation Procedure for Worldwide Harmonized Light Vehicles Test Cycle via Hardware in the Loop—Real Time Testing. In Proceedings of the 12th International Congress of Automotive and Transport Engineering (CONAT), Brasov, Romania, 26–29 October 2016. [Google Scholar]
- Zhang, L.; Du, Z.; Zhao, S.; Zhai, Y.; Shen, Y. Development and Verification of Traffic Confrontation Simulation Test Platform Based on PanoSim. In Proceedings of the 4th IEEE Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Electr, Network, 12–14 June 2020. [Google Scholar]
- Ortega, J.; Lengyel, H.; Szalay, Z. Overtaking maneuver scenario building for autonomous vehicles with PreScan software. Transport. Engi. 2020, 2, 100029. [Google Scholar] [CrossRef]
- Ates, U. Long-Term Planning with Deep Reinforcement Learning on Autonomous Drones. In Proceedings of the 2020 Innovations in Intelligent Systems and Applications Conference (ASYU), Istanbul, Turkey, 15–17 October 2020. [Google Scholar]
- Li, G.F.; Yang, Y.F.; Zhang, T.R.; Qu, X.D.; Cao, D.P.; Cheng, B.; Li, K.Q. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios. Transport. Res. C-Emer. 2021, 122, 102820. [Google Scholar] [CrossRef]
- Akhter, S.; Ahsan, N.; Quaderi, S.; Sumit, S.; Rahman, M. A sumo based simulation framework for intelligent traffic management system. Transport. Res. C-Emer. 2020, 8, 1–5. [Google Scholar] [CrossRef]
- Song, Z.; Wang, H.; Sun, J.; Tian, Y. Experimental findings with VISSIM and TransModeler for evaluating environmental and safety impacts using micro-simulations. Transport. Res. Rec. 2020, 2674, 566–580. [Google Scholar] [CrossRef]
- Szalai, M.; Varga, B.; Tettamanti, T.; Tihanyi, V. Mixed reality test environment for autonomous cars using Unity 3D and SUMO. In Proceedings of the 18th IEEE World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 23–25 January 2020. [Google Scholar]
- Elrofai, H.; Paardekooper, J.; Gelder, E.; Kalisvaart, S.; Camp, O.; StreetWise: Scenario-Based Safety Validation of Connected and Automated Driving. Neth. Organ. Appl. Sci. Res. TNO Tech. Rep. 2018. Available online: https://repository.tno.nl/islandora/object/uuid:2b155e03-5c51-4c9f-8908-3fa4c34b3897 (accessed on 7 August 2022).
- De Gelder, E.; Paardekooper, J.P.; Saberi, A.K.; Elrofai, H.; Camp, O.; Kraines, S.; Ploeg, J.; Schutter, B.D. Towards an Ontology for Scenario Definition for the Assessment of Automated Vehicles: An Object-Oriented Framework. IEEE Trans. Intell. Veh. 2022, 7, 300–314. [Google Scholar] [CrossRef]
- China Automotive Technology and Research Center Co., Ltd. Development and Application of Automated Driving Test Scenaro Technology; Machine PressL: Beijing, China, 2020. [Google Scholar]
- Xu, X.; Hu, W.; Dong, H.; Wang, Y.; Xiao, L.; Li, P. Summary of key technologies for the construction of autonomous vehicle test scenarios. Automot. Eng. 2021, 43, 610–619. [Google Scholar]
- Vargas, J.; Alsweiss, S.; Jernigan, M.; Amin, A.; Brinkmann, M.; Santos, J.; Razdan, R. Development of Sensors Testbed for Autonomous Vehicles. In Proceedings of the IEEE SoutheastCon Conference, Huntsville, AL, USA, 11–14 April 2019. [Google Scholar]
- Wei, B.; Xiao, L.; Wei, W.; Song, Y.; Yan, B.C.; Huo, Z.S. A high-bandwidth and low-cost data processing approach with heterogeneous storage architectures. Pers. Ubiquit. Comput. 2020, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Zhu, B.; Zhang, P.; Zhao, J.; Chen, H.; Xu, Z.; Zhao, X.; Deng, W. Review of Scenario-Based Virtual Validation Methods for Automated Vehicles. China J. Highw. Transp. 2019, 32, 1–19. [Google Scholar]
- Kirovskii, O. Determination of Validation Testing Scenarios for an ADAS Functionality: Case Study. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Davision, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Deng, W.; Zhang, S.; Qi, S.Q.; Li, X. A Novel Method of Radar Modeling for Vehicle Intelligence. SAE Tech. Pap. 2017, 10, 50–57. [Google Scholar]
- Economic Commission for Europe. Uniform Provisions Concerning the Approval of Vehicles with Regard to Automated Lane Keeping Systems; United Nations: New York, NY, USA; Economic Commission for Europe: Geneva, Switzerland, 2021. [Google Scholar]
- Economic Commission for Europe. Proposal for the 01 Series of Amendments to UN Regulation No. 157 (Automated Lane Keeping Systeme); United Nations: Geneva, Switzerland; Economic Commission for Europe: Geneva, Switzerland, 2022. [Google Scholar]
- Ministry of Land and Communications. TRIAS 48-R157-01 Automated Lane Keeping Systems Test (Agreement No.157); Ministry of Land and Communications: Tokyo, Japan, 2020. [Google Scholar]
- Economic Commission for Europe. New Assessment/ Test Method for Automated Driving (NATMG) uidelines for Validating Automated Driving (ADS) Safety; United Nations: Geneva, Switzerland; Economic Commission for Europe: Geneva, Switzerland, 2022. [Google Scholar]
- European Commission. Draft Commission Implementing Regulation: Laying Down Rules for the Application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as Regards Uniform Procedures and Technical Specifications for the Type-Approval of Motor Vehicles with Regard to Their Automated Driving System (ADS) (G/TBT/N/EU/884); European Commission: Geneva, Switzerland, 2022.
- ISO 11010-1: 2022. Passenger Cars—Simulation Model Classification—Part 1: Vehicle Dynamics. International Organization for Standardization: Geneva, Switzerland, 2021.
- ISO 22140: 2021. Passenger Cars—Validation of Vehicle Dynamics Simulation—Lateral Transient Response Test Methods. International Organization for Standardization: Geneva, Switzerland, 2021.
- Schöner, H.P. Simulation in Development and Testing of Autonomous Vehicles. In 18th Internationales Stuttgarter Symposium; Springer: Wiesbaden, Germany, 2018. [Google Scholar]
- Liu, F.; Xu, X.; Chen, Z.; Li, Y.; Li, J.; Pan, P.; Zhang, J.; Zhang, Z. Research on the safety testing and evaluation methods of intelligent connected vehicles equipped with autonomous driving function. J. Automot. Eng. 2022, 12, 221–227. [Google Scholar]
- Ahamed MF, S.; Tewolde, G.; Kwon, J. Software-inthe-Loop Modeling and Simulation Framework for Autonomous Vehicles. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 305–310. [Google Scholar]
- Bachuwar, S.; Bulsara, A.; Dossaji, H.; Gopinath, A.; Paredis, C.; Pilla, S.; Jia, Y. Integration of Autonomous Vehicle Frameworks for Software-in-the-Loop Testing. SAE Tech. Pap. 2020, 2, 2617–2622. [Google Scholar]
- Kato, S.; Tokunaga, S.; Maruyama, Y.; Maeda, S.; Hirabayashi, M.; Kitsukawa, Y.; Monrroy, A.; Ando, T.; Fujii, Y.; Azumi, T. Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; pp. 287–296. [Google Scholar]


| Number | Literature Quality Assessment Index | Marking |
|---|---|---|
| 1 | Is the motivation clear? | Yes is 2, Not exactly 1, No is 0 |
| 2 | Are the hypotheses/questions under study clearly and adequately stated? | Yes is 2, Not exactly 1, No is 0 |
| 3 | Is the study design suitable for the study purposes? | Yes is 2, Not exactly 1, No is 0 |
| 4 | Does the study clearly describe the type or characteristics of collaborative control clearly? | Yes is 2, Not exactly 1, No is 0 |
| 5 | Is the test environment clearly described? | Yes is 2, Not exactly 1, No is 0 |
| 6 | Is the way of data collection is clear and reasonable? | Yes is 2, Not exactly 1, No is 0 |
| 7 | Are all the influencing factors strictly restricted in the experimental studies? | Yes is 2, Not exactly 1, No is 0 |
| 8 | Are the data fully analyzed? | Yes is 2, Not exactly 1, No is 0 |
| 9 | Are the investigation or test results clearly stated? | Yes is 2, Not exactly 1, No is 0 |
| 10 | Are the study conclusions fully discussed? | Yes is 2, Not exactly 1, No is 0 |
| 11 | Is there any lack of research and prospects? | Yes is 2, Not exactly 1, No is 0 |
| Classification/ Characteristics | Frequency Band | Band Range | Frequency Range |
|---|---|---|---|
| Ultra-long-wave | VLF | 105~104 m | 3~30 kHz |
| Long-wave | Low frequency | 104~103 m | 30~300 kHz |
| Medium-wave | Intermediate frequency | 103~102 m | 300~3000 kHz |
| Short-wave | High frequency | 102~10 m | 3~30 MHz |
| Ultra-short-wave | VHF | 10~1 m | 30~300 MHz |
| Microwave | Extra-high frequency | 100~10 cm | 300~3000 MHz |
| UHF | 10~1 cm | 3~30 GHz | |
| Very high frequency | 10~1 mm | 30~300 GHz | |
| Ultra-high frequency | <1 mm | >300 GHz |
| Test Specification | Virtual Test | Closed Site Test | Real Car Road Test |
|---|---|---|---|
| Test the truth | Depending on the authenticity of the model, the authenticity is relatively low in comparison. | More real, but not the real dynamic elements of other traffic participants. | Real, consistent with the actual driving environment of autonomous cars on the road. |
| Test cost | Low, the cost of the software systems is relatively low. | The construction cost of the test site is relatively high. | High, it requires too many people and over a long time to drive. |
| Testing efficiency | High, multi-core parallel testing can greatly improve the simulation speed. | High, can be targeted to strengthen the test for key scenarios. | Low, road mileage-based test methods require long driving times with multiple people and multiple cars. |
| Repeatability | Strong, you can build the same test scenario according to the defined data. | Strong, the scene elements can be reconstructed through the scene configuration requirements. | Poor, not a reproducible test on the public road. |
| Number of test scenarios | Many, any number of test scenarios can be generated given the logical scenario parameter space. | Less often, although as many scenarios can be built as possible according to scene element changes, the number of virtual test and open road test scenarios is still low. | Many, as many required test scenarios can be encountered long enough. |
| Test purpose | Embedded in each link of the system development, massive scene testing, to verify the boundaries of the autonomous driving function. | At the same time, the scene type that is not encountered or with low probability in reality can be built by configuring the field and the scene elements to verify the operation of the system under the boundary situations. | Clarify the statistical laws of related events, verify the system boundaries in practical situations, detect the interaction between autonomous vehicles and traditional vehicles, and find new scenarios that were not considered. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Han, Y.; Wang, S.; Tian, D.; Cai, M.; Liu, M.; Wang, L. A Review of Intelligent Connected Vehicle Cooperative Driving Development. Mathematics 2022, 10, 3635. https://doi.org/10.3390/math10193635
Wang B, Han Y, Wang S, Tian D, Cai M, Liu M, Wang L. A Review of Intelligent Connected Vehicle Cooperative Driving Development. Mathematics. 2022; 10(19):3635. https://doi.org/10.3390/math10193635
Chicago/Turabian StyleWang, Biyao, Yi Han, Siyu Wang, Di Tian, Mengjiao Cai, Ming Liu, and Lujia Wang. 2022. "A Review of Intelligent Connected Vehicle Cooperative Driving Development" Mathematics 10, no. 19: 3635. https://doi.org/10.3390/math10193635
APA StyleWang, B., Han, Y., Wang, S., Tian, D., Cai, M., Liu, M., & Wang, L. (2022). A Review of Intelligent Connected Vehicle Cooperative Driving Development. Mathematics, 10(19), 3635. https://doi.org/10.3390/math10193635