
Quality Evaluation for Reconstructing Chaotic Attractors

Abstract
:1. Introduction
2. Systems under Investigation
- is the initial condition;
- is the first order derivative state vector;
- , is the vector field which defines the dynamical evolution of the system; means that the time t is positive.
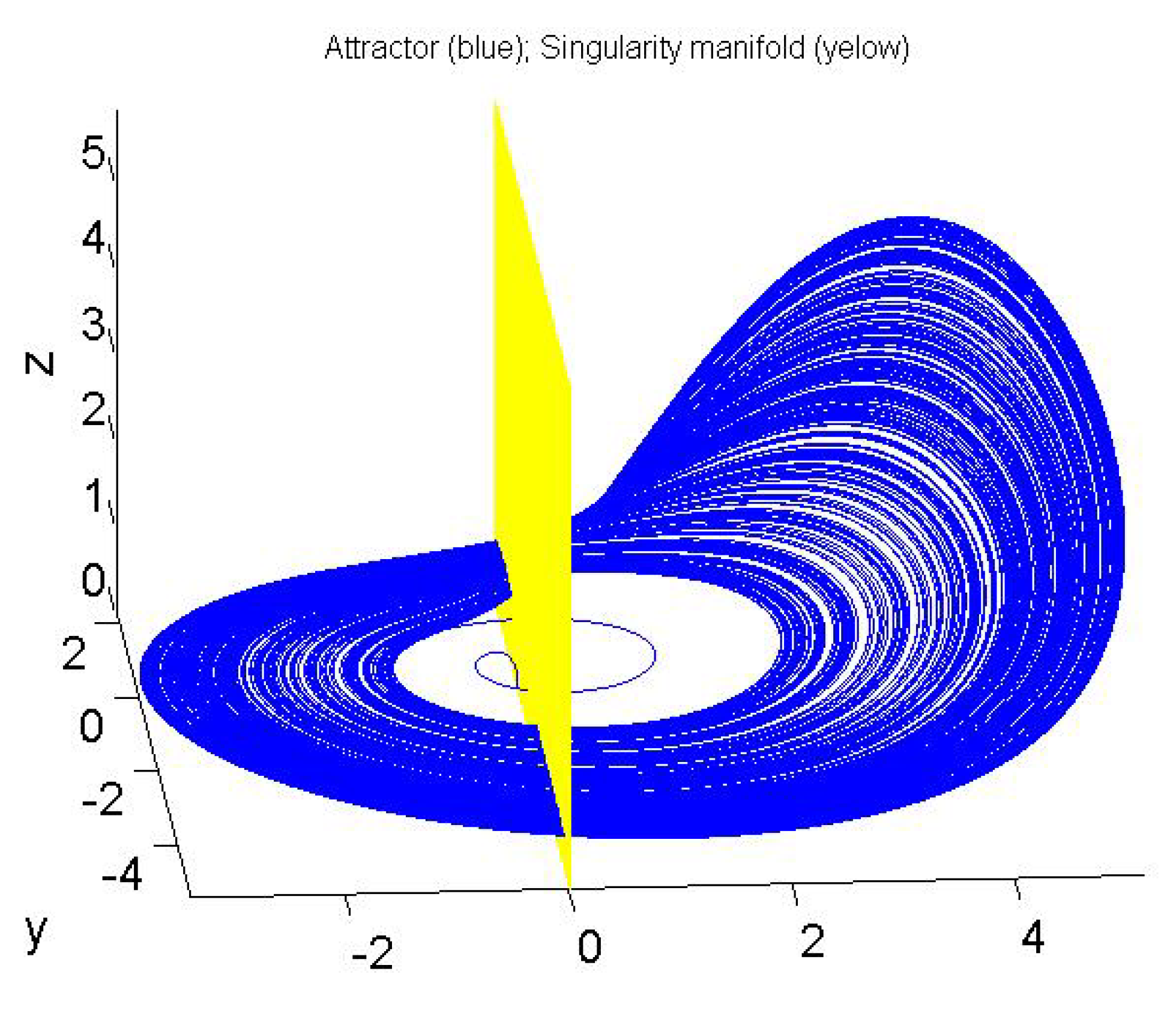
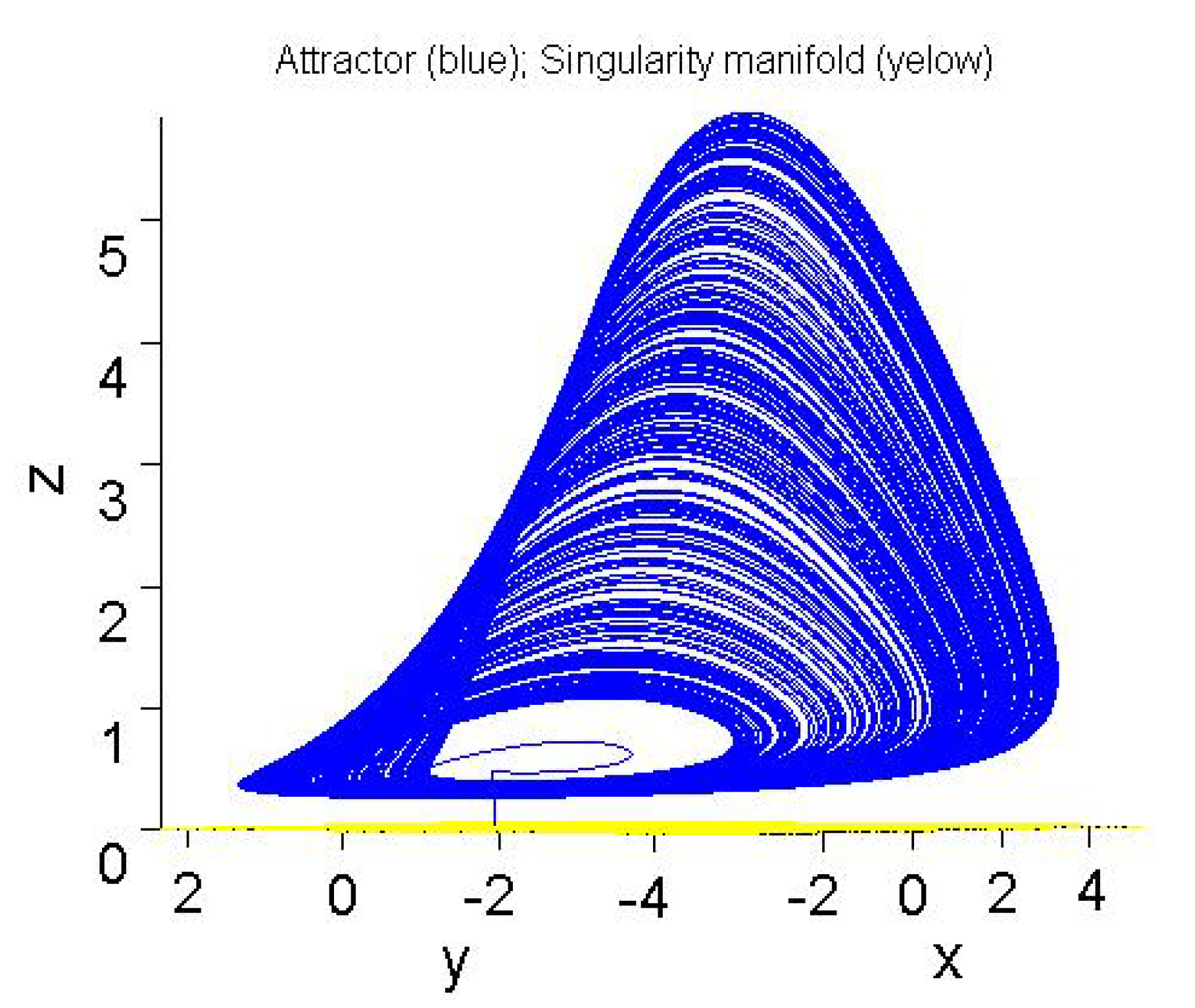
2.1. Lorenz System
- Fourier transform (power spectrum) of any of the state variables is similar to white noise. This property indicates the appearance of a non-periodic chaotic trajectory [22].
- Trajectories which are initially very close to each other diverge exponentially over time. This feature translates into a high sensitivity to initial conditions [23] and also implies the impossibility of predicting the long-term evolution of chaotic systems.
- Solutions of deterministic chaotic systems are generated by precise mathematical laws. This implies that chaotic systems can be reproduced [24], even if their evolution cannot be completely predicted.
2.2. Rössler System
3. Quality Observability Index
4. Experiments and Results
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Heffernan, D.M.; Jenkins, P.; Daly, M.; Hawdon, B.; O’Gorman, J. Characterization of chaos. Int. J. Theor. Phys. 1992, 31, 1345–1362. [Google Scholar] [CrossRef]
- Gonzalez, C.E.; Lainscsek, C.; Sejnowski, T.J.; Letellier, C. Assessing observability of chaotic systems using delay differential analysis. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 103113. [Google Scholar] [CrossRef] [PubMed]
- Letellier, C.; Barbot, J.P. Optimal flatness placement of sensors and actuators for controlling chaotic systems. Chaos Interdiscip. J. Nonlinear Sci. 2021, 31, 103114. [Google Scholar]
- Frunzete, M.; Barbot, J.P.; Letellier, C. Influence of the singular manifold of nonobservable states in reconstructing chaotic attractors. Phys. Rev. 2012, 86, 026205. [Google Scholar]
- Stefanescu, V.; Stoichescu, D.; Frunzete, M.; Florea, B. Influence of computer computation precision in chaos analysis. In Scientific Bulletin-Series A-Applied Mathematics and Physics; University Politehnica of Bucharest: Bucharest, Romania, 2013; Volume 75, pp. 151–162. [Google Scholar]
- Shukla, P.K.; Khare, A.; Rizvi, M.A.; Stalin, S.; Kumar, S. Applied cryptography using chaos function for fast digital logic-based systems in ubiquitous computing. Entropy 2015, 17, 1387–1410. [Google Scholar]
- Suomalainen, J.; Kotelba, A.; Kreku, J.; Lehtonen, S. Evaluating the efficiency of physical and cryptographic security solutions for quantum immune IoT. Cryptography 2018, 2, 5. [Google Scholar] [CrossRef] [Green Version]
- Butt, K.K.; Li, G.; Masood, F.; Khan, S. A digital image confidentiality scheme based on pseudo-quantum chaos and lucas sequence. Entropy 2020, 22, 1276. [Google Scholar] [CrossRef]
- Vlad, A.; Luca, A.; Frunzete, M. Computational measurements of the transient time and of the sampling distance that enables statistical independence in the logistic map. In Proceedings of the International Conference on Computational Science and Its Applications, Yongin, Korea, 29 June–2 July 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 703–718. [Google Scholar]
- Alves, P.; Duarte, L.; da Mota, L. A new characterization of chaos from a time series. Chaos Solitons Fractals 2017, 104, 323–326. [Google Scholar]
- Ruelle, D.; Takens, F. On the nature of turbulence. In Les Rencontres Physiciens-Mathématiciens de Strasbourg-RCP25; Université Louis Pasteur: Strasbourg, France, 1971; Volume 12, pp. 1–44. [Google Scholar]
- Vladeanu, C.; El Assad, S.; Carlach, J.C.; Quere, R.; Marghescu, I. Optimum PAM-TCM schemes using left-circulate function over GF(2N). In Proceedings of the International Symposium on Signals, Circuits and Systems ISSCS 2009, Iasi, Romania, 9–10 July 2009; pp. 1–4. [Google Scholar]
- Perruquetti, W.; Barbot, J.P. Chaos in Automatic Control; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Abingdon, UK, 2006. [Google Scholar]
- Sofroniou, A.; Bishop, S. Dynamics of a parametrically excited system with two forcing terms. Mathematics 2014, 2, 172–195. [Google Scholar] [CrossRef] [Green Version]
- Lee, T.F.; Chang, I.P.; Kung, T.S. Blockchain-based healthcare information preservation using extended chaotic maps for HIPAA privacy/security regulations. Appl. Sci. 2021, 11, 10576. [Google Scholar] [CrossRef]
- Boeing, G. Visual analysis of nonlinear dynamical systems: Chaos, fractals, self-similarity and the limits of prediction. Systems 2016, 4, 37. [Google Scholar]
- Chanwimalueang, T.; Mandic, D.P. Cosine similarity entropy: Self-correlation-based complexity analysis of dynamical systems. Entropy 2017, 19, 652. [Google Scholar]
- Sambas, A.; Vaidyanathan, S.; Bonny, T.; Zhang, S.; Hidayat, Y.; Gundara, G.; Mamat, M. Mathematical model and FPGA realization of a multi-stable chaotic dynamical system with a closed butterfly-like curve of equilibrium points. Appl. Sci. 2021, 11, 788. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic Nonperiodic Flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar]
- Dinu, A.; Frunzete, M. The Lorenz chaotic system, statistical independence and sampling frequency. In Proceedings of the 2021 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 15–16 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- Berezowski, M.; Lawnik, M. Hidden Attractors in Discrete Dynamical Systems. Entropy 2021, 23, 616. [Google Scholar]
- Chen, B.; Cheng, X.; Bao, H.; Chen, M.; Xu, Q. Extreme Multistability and Its Incremental Integral Reconstruction in a Non-Autonomous Memcapacitive Oscillator. Mathematics 2022, 10, 754. [Google Scholar] [CrossRef]
- Bao, H.; Ding, R.; Hua, M.; Wu, H.; Chen, B. Initial-condition effects on a two-memristor-based Jerk system. Mathematics 2022, 10, 411. [Google Scholar]
- Demir, K.; Ergün, S. An analysis of deterministic chaos as an entropy source for random number generators. Entropy 2018, 20, 957. [Google Scholar] [CrossRef] [Green Version]
- Rössler, O.E. An equation for hyperchaos. Phys. Lett. 1979, 71, 155–157. [Google Scholar] [CrossRef]
- Letellier, C.; Aguirre, L.A. Interplay between synchronization, observability, and dynamics. Phys. Rev. E 2010, 82, 016204. [Google Scholar] [CrossRef]
- Frunzete, M.; Luca, A.; Vlad, A.; Barbot, J.P. Observability and singularity in the context of rössler map. In University Politehnica of Bucharest Scientific Bulletin, Series A: Applied Mathematics and Physics; University Politehnica of Bucharest: Bucharest, Romania, 2012; Volume 74, pp. 83–92. [Google Scholar]
- Letellier, C.; Gilmore, R. Covering dynamical systems: Twofold covers. Phys. Rev. 2000, 63, 016206. [Google Scholar]
- Aguirre, L.A.; Portes, L.L.; Letellier, C. Structural, dynamical and symbolic observability: From dynamical systems to networks. PLoS ONE 2018, 13, e0206180. [Google Scholar]
- Perez-Padron, J.; Posadas-Castillo, C.; Paz-Perez, J.; Zambrano-Serrano, E.; Platas-Garza, M. FPGA realization and Lyapunov–Krasovskii analysis for a master-slave synchronization scheme involving chaotic systems and time-delay neural networks. Math. Probl. Eng. 2021, 2021, 2604874. [Google Scholar]
- Vijayakumar, M.; Natiq, H.; Leutcho, G.D.; Rajagopal, K.; Jafari, S.; Hussain, I. Hidden and Self-Excited Collective Dynamics of a New Multistable Hyper-Jerk System with Unique Equilibrium. Int. J. Bifurc. Chaos 2022, 32, 2250063. [Google Scholar] [CrossRef]
- Mannella, R.; McClintock, P.V. Noise in nonlinear dynamical systems. Contemp. Phys. 1990, 31, 179–194. [Google Scholar] [CrossRef]
- Chen, B.; Wornell, G.W. Analog error-correcting codes based on chaotic dynamical systems. IEEE Trans. Commun. 1998, 46, 881–890. [Google Scholar] [CrossRef] [Green Version]
- Murguia, C.; Shames, I.; Farokhi, F.; Nešić, D.; Poor, H.V. On privacy of dynamical systems: An optimal probabilistic mapping approach. IEEE Trans. Inf. Forensics Secur. 2021, 16, 2608–2620. [Google Scholar] [CrossRef]
- Frunzete, M.; Popescu, A.A.; Barbot, J.P. Dynamical discrete-time rössler map with variable delay. In Proceedings of the International Conference on Computational Science and Its Applications, Banff, AB, Canada, 22–25 June 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 431–446. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output | No-Intersection Coefficient q |
|---|---|
| x | 0.8103 |
| y | 0.3081 |
| z | 0.4245 |
| d% | Lorenz | Rössler | |||
|---|---|---|---|---|---|
| 1 | 0.7331 | 0.4666 | 0.9407 | 0.3300 | 0.9972 |
| 2 | 0.7279 | 0.5025 | 0.9473 | 0.3605 | 0.9974 |
| 3 | 0.7455 | 0.5746 | 0.9505 | 0.3817 | 0.9971 |
| 4 | 0.7651 | 0.6632 | 0.9521 | 0.4151 | 0.9970 |
| 5 | 0.7862 | 0.7585 | 0.9532 | 0.4425 | 0.9968 |
| 6 | 0.8005 | 0.8398 | 0.9539 | 0.4744 | 0.9967 |
| 7 | 0.8151 | 0.8906 | 0.9545 | 0.4964 | 0.9969 |
| 8 | 0.8309 | 0.9184 | 0.9547 | 0.5252 | 0.9971 |
| 9 | 0.8447 | 0.9386 | 0.9552 | 0.5434 | 0.9972 |
| 10 | 0.8577 | 0.9460 | 0.9555 | 0.5643 | 0.9972 |
| Parameter | Value | Significance |
|---|---|---|
| 1 | observable | |
| 0 | observable | |
| q | 1 | no intersecton |
| 0 | huge intersection | |
| r | 1 | maximum influence |
| 0 | minimum influence |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frunzete, M. Quality Evaluation for Reconstructing Chaotic Attractors. Mathematics 2022, 10, 4229. https://doi.org/10.3390/math10224229
Frunzete M. Quality Evaluation for Reconstructing Chaotic Attractors. Mathematics. 2022; 10(22):4229. https://doi.org/10.3390/math10224229
Chicago/Turabian StyleFrunzete, Madalin. 2022. "Quality Evaluation for Reconstructing Chaotic Attractors" Mathematics 10, no. 22: 4229. https://doi.org/10.3390/math10224229
APA StyleFrunzete, M. (2022). Quality Evaluation for Reconstructing Chaotic Attractors. Mathematics, 10(22), 4229. https://doi.org/10.3390/math10224229