
Tan-Type BLF-Based Attitude Tracking Control Design for Rigid Spacecraft with Arbitrary Disturbances


Abstract
:1. Introduction
- A constrained predefined-time backstepping control is designed. It is guaranteed that the system trajectories converge to zero within a finite time, independent of the initial condition and the control gains.
- A quadratic function is utilized in the virtual attitude control to resolve the problem of singularity without employing any command filter or piece-wise continuous function.
- To satisfy the constraint on the attitude tracking error, a tan-type BLF is incorporated into the virtual attitude control. Therefore, the constraint is handled by satisfying a simple inequality condition.
- A predefined-time disturbance observer is developed to precisely reconstruct the differential of the virtual control and the total disturbance. The settling time of the observer is always less than a predefined time, even if the initial estimation error tends to infinity. Moreover, this time is determined as a tunable gain in the observer.
2. Problem Formulation
2.1. Equations of Motion of a Rigid Spacecraft Attitude System
2.1.1. Attitude Kinematics
2.1.2. Rigid Spacecraft Dynamics
2.2. Control Objective
- The spacecraft attitude tracks the reference attitude trajectory in a predefined time, in spite of the system’s uncertainty and environmental disturbance.
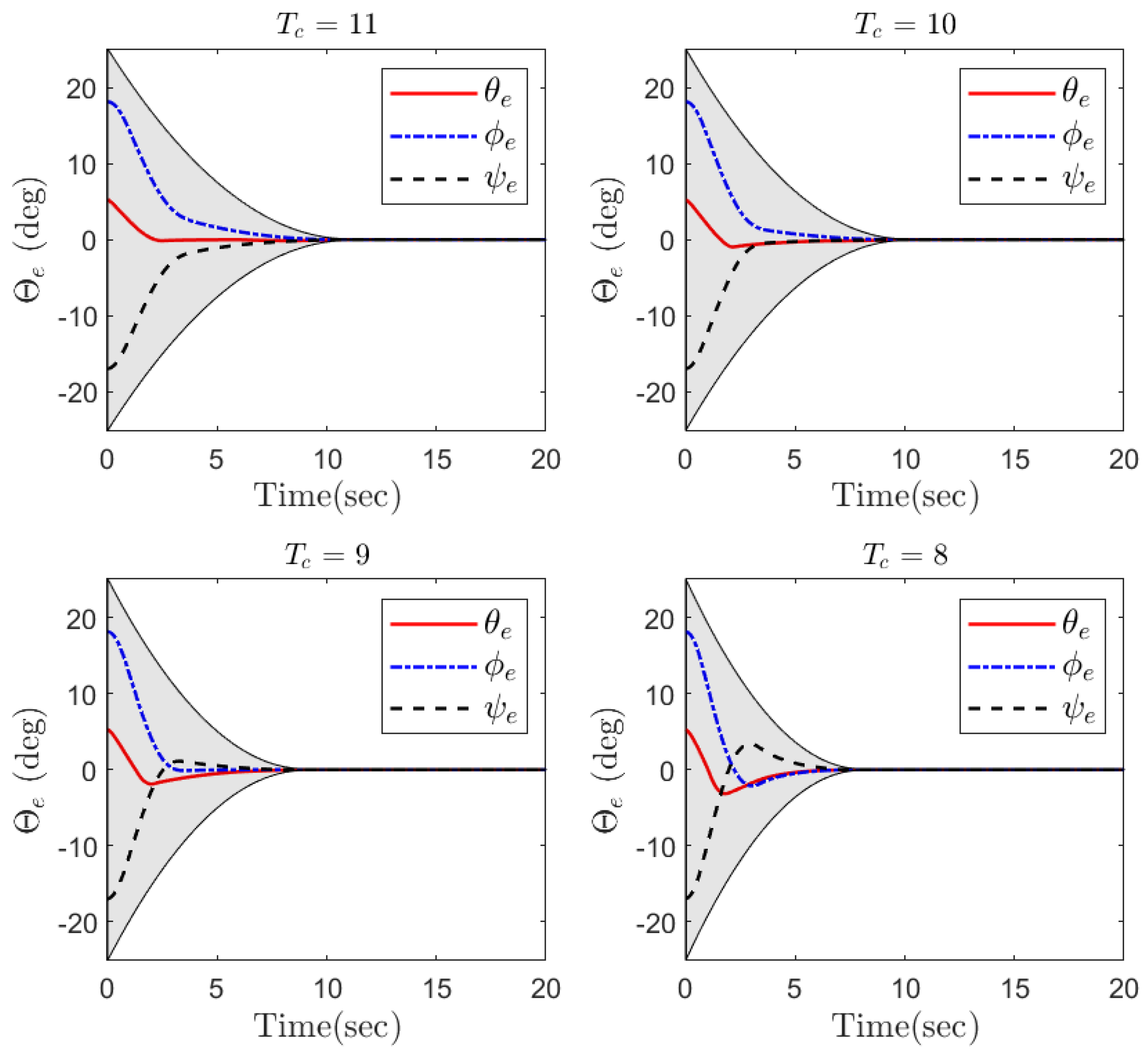
- The predefined performance for the attitude tracking error in transient (e.g., maximum overshoot) and steady-state (e.g., ultimate tracking error) settings is specified in advance.
2.3. Preliminaries
3. Attitude Control Derivation
3.1. Error Transformation
3.2. Tan-Type BLF Attitude Control Design
3.3. Disturbance Observer Design
3.4. Stability Analysis
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Euler angles vector | FTPPF | ||
| roll | initial value of PPF | ||
| pitch | final value of FTPPF | ||
| angular velocity | convergence time of FTPPF | ||
| control torque | transformed tracking error | ||
| disturbance | virtual control | ||
| inertia matrix | total disturbance | ||
| attitude reference trajectory | estimation of total disturbance | ||
| attitude tracking error | state of observer | ||
| angular velocity tracking error | observer error | ||
| body-fixed frame | convergence time of observer | ||
| inertial-fixed frame | nominal part of | ||
| uncertain part of | orbital rate | ||
| observer gains | 3-D vector space | ||
| positive constant | virtual control error | ||
| intermediate control | sgn | sign function |
References
- Yao, Q.; Jahanshahi, H.; Bekiros, S.; Mihalache, S.F.; Alotaibi, N.D. Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft. Mathematics 2022, 10, 2467. [Google Scholar] [CrossRef]
- Dai, M.Z.; Xiao, B.; Zhang, C.; Wu, J. Event-triggered policy to spacecraft attitude stabilization with actuator output nonlinearities. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2855–2859. [Google Scholar] [CrossRef]
- Chen, W.; Hu, Q. Sliding-mode-based attitude tracking control of spacecraft under reaction wheel uncertainties. IEEE/CAA J. Autom. Sin. 2022, 1–13. [Google Scholar] [CrossRef]
- Yao, Q. Robust finite-time control design for attitude stabilization of spacecraft under measurement uncertainties. Adv. Space Res. 2021, 68, 3159–3175. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Vibration Suppression for Two-Inertia System With Variable-Length Flexible Load Based on Neural Network Compensation Sliding Mode Controller and Angle-Independent Method. IEEE/ASME Trans. Mechatron. 2022, 1–12. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Dynamic modeling and control for dual-flexible servo system considering two-dimensional deformation based on neural network compensation. Mech. Mach. Theory 2022, 175, 104954. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Tracking control strategy for space flexible manipulator considering nonlinear friction torque based on adaptive fuzzy compensation sliding mode controller. Adv. Space Res. 2022. [Google Scholar] [CrossRef]
- Yao, Q.; Jahanshahi, H.; Moroz, I.; Alotaibi, N.D.; Bekiros, S. Neural Adaptive Fixed-Time Attitude Stabilization and Vibration Suppression of Flexible Spacecraft. Mathematics 2022, 10, 1667. [Google Scholar] [CrossRef]
- Golestani, M.; Mobayen, S.; ud Din, S.; El-Sousy, F.F.; Vu, M.T.; Assawinchaichote, W. Prescribed performance attitude stabilization of a rigid body under physical limitations. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4147–4155. [Google Scholar] [CrossRef]
- Hu, Q.; Tan, X. Dynamic near-optimal control allocation for spacecraft attitude control using a hybrid configuration of actuators. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1430–1443. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, B.; Lu, J.; Cao, J.; Lu, G. Event-triggered sliding mode control for attitude stabilization of a rigid spacecraft. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3290–3299. [Google Scholar] [CrossRef]
- Li, H.; Yan, W.; Shi, Y. Continuous-time model predictive control of under-actuated spacecraft with bounded control torques. Automatica 2017, 75, 144–153. [Google Scholar] [CrossRef]
- Fridman, L.; Levant, A.; Davila, J. Observation of linear systems with unknown inputs via high-order sliding-modes. Int. J. Syst. Sci. 2007, 38, 773–791. [Google Scholar] [CrossRef]
- Sanyal, A.; Fosbury, A.; Chaturvedi, N.; Bernstein, D.S. Inertia-free spacecraft attitude tracking with disturbance rejection and almost global stabilization. J. Guid. Control Dyn. 2009, 32, 1167–1178. [Google Scholar] [CrossRef] [Green Version]
- Weiss, A.; Kolmanovsky, I.; Bernstein, D.S.; Sanyal, A. Inertia-free spacecraft attitude control using reaction wheels. J. Guid. Control Dyn. 2013, 36, 1425–1439. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.; Biggs, J.D.; Zazzera, F.B.; Cui, N. Adaptive attitude tracking with active uncertainty rejection. J. Guid. Control Dyn. 2018, 41, 550–558. [Google Scholar] [CrossRef]
- Sun, L.; Zheng, Z. Disturbance-observer-based robust backstepping attitude stabilization of spacecraft under input saturation and measurement uncertainty. IEEE Trans. Ind. Electron. 2017, 64, 7994–8002. [Google Scholar] [CrossRef]
- Xiao, B.; Cao, L.; Xu, S.; Liu, L. Robust tracking control of robot manipulators with actuator faults and joint velocity measurement uncertainty. IEEE/ASME Trans. Mechatron. 2020, 25, 1354–1365. [Google Scholar] [CrossRef]
- Cao, L.; Xiao, B.; Golestani, M. Robust fixed-time attitude stabilization control of flexible spacecraft with actuator uncertainty. Nonlinear Dyn. 2020, 100, 2505–2519. [Google Scholar] [CrossRef]
- Xiao, B.; Wu, X.; Cao, L.; Hu, X. Prescribed Time Attitude Tracking Control of Spacecraft with Arbitrary Disturbance. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2531–2540. [Google Scholar] [CrossRef]
- Xia, K.; Zou, Y. Adaptive fixed-time fault-tolerant control for noncooperative spacecraft proximity using relative motion information. Nonlinear Dyn. 2020, 100, 2521–2535. [Google Scholar] [CrossRef]
- Du, H.; Zhang, J.; Wu, D.; Zhu, W.; Li, H.; Chu, Z. Fixed-time attitude stabilization for a rigid spacecraft. ISA Trans. 2020, 98, 263–270. [Google Scholar] [CrossRef] [PubMed]
- Zou, A.M.; Kumar, K.D.; de Ruiter, A.H. Fixed-time attitude tracking control for rigid spacecraft. Automatica 2020, 113, 108792. [Google Scholar] [CrossRef]
- Zou, A.M.; Fan, Z. Fixed-time attitude tracking control for rigid spacecraft without angular velocity measurements. IEEE Trans. Ind. Electron. 2020, 67, 6795–6805. [Google Scholar] [CrossRef]
- Shi, X.N.; Zhou, Z.G.; Zhou, D. Adaptive Fault-Tolerant Attitude Tracking Control of Rigid Spacecraft on Lie Group with Fixed-Time Convergence. Asian J. Control 2020, 22, 423–435. [Google Scholar] [CrossRef]
- Cruz-Ortiz, D.; Chairez, I.; Poznyak, A. Non-singular terminal sliding-mode control for a manipulator robot using a barrier Lyapunov function. ISA Trans. 2022, 121, 268–283. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.; Fan, W.; Wang, C.; Ma, P. Finite-time control for quadrotor based on composite barrier Lyapunov function with system state constraints and actuator faults. Aerosp. Sci. Technol. 2021, 119, 107063. [Google Scholar] [CrossRef]
- Qin, H.; Chen, X.; Sun, Y. Adaptive state-constrained trajectory tracking control of unmanned surface vessel with actuator saturation based on RBFNN and tan-type barrier Lyapunov function. Ocean Eng. 2022, 253, 110966. [Google Scholar] [CrossRef]
- Yuan, F.; Liu, Y.J.; Liu, L.; Lan, J.; Li, D.; Tong, S.; Chen, C.P. Adaptive Neural Consensus Tracking Control for Nonlinear Multiagent Systems Using Integral Barrier Lyapunov Functionals. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Yao, Q.; Jahanshahi, H.; Batrancea, L.M.; Alotaibi, N.D.; Rus, M.I. Fixed-Time Output-Constrained Synchronization of Unknown Chaotic Financial Systems Using Neural Learning. Mathematics 2022, 10, 3682. [Google Scholar] [CrossRef]
- Wang, D.; Liu, S.; He, Y.; Shen, J. Barrier Lyapunov function-based adaptive back-stepping control for electronic throttle control system. Mathematics 2021, 9, 326. [Google Scholar] [CrossRef]
- Zhou, Z.G.; Zhou, D.; Zhang, Y.; Chen, X.; Shi, X.N. Event-triggered integral sliding mode controller for rigid spacecraft attitude tracking with angular velocity constraint. Int. J. Control 2021. [Google Scholar] [CrossRef]
- Wu, Y.Y.; Zhang, Y.; Wu, A.G. Preassigned finite-time attitude control for spacecraft based on time-varying barrier Lyapunov functions. Aerosp. Sci. Technol. 2021, 108, 106331. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, G. Adaptive finite-time attitude tracking control for state constrained rigid spacecraft systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3552–3556. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica 2013, 49, 3591–3599. [Google Scholar] [CrossRef]
- Tiwari, P.M.; Janardhanan, S.U.; un Nabi, M. Rigid spacecraft attitude control using adaptive integral second order sliding mode. Aerosp. Sci. Technol. 2015, 42, 50–57. [Google Scholar] [CrossRef]
- Munoz-Vazquez, A.J.; Sánchez-Torres, J.D.; Jimenez-Rodriguez, E.; Loukianov, A.G. Predefined-time robust stabilization of robotic manipulators. IEEE/ASME Trans. Mechatron. 2019, 24, 1033–1040. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems Third Edition; Patience Hall: Hoboken, NJ, USA, 2002; Volume 115. [Google Scholar]
- Xie, S.; Chen, Q. Adaptive nonsingular predefined-time control for attitude stabilization of rigid spacecrafts. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 189–193. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, L. Fixed-time adaptive fuzzy control for uncertain strict feedback switched systems. Inf. Sci. 2021, 546, 742–752. [Google Scholar] [CrossRef]
- Golestani, M.; Esmailzadeh, M.; Mobayen, S. Constrained attitude control for flexible spacecraft: Attitude pointing accuracy and pointing stability improvement. IEEE Trans. Syst. Man Cybern. Syst. 2022. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. Finite-Time Prescribed Performance Control for Spacecraft Attitude Tracking. IEEE/ASME Trans. Mechatron. 2022, 27, 3087–3098. [Google Scholar] [CrossRef]
- Golestani, M.; Zhang, W.; Yang, Y.; Xuan-Mung, N. Disturbance observer-based constrained attitude control for flexible spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2022. [Google Scholar] [CrossRef]
- Phanomchoeng, G.; Rajamani, R. Real-time estimation of rollover index for tripped rollovers with a novel unknown input nonlinear observer. IEEE/ASME Trans. Mechatron. 2013, 19, 743–754. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
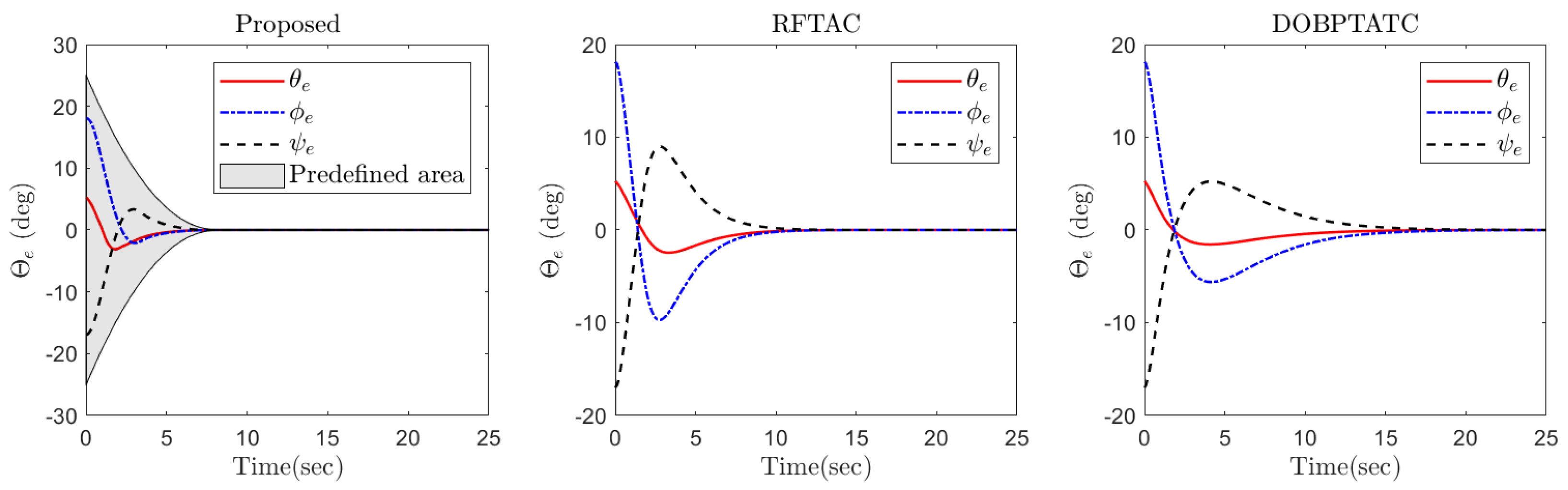
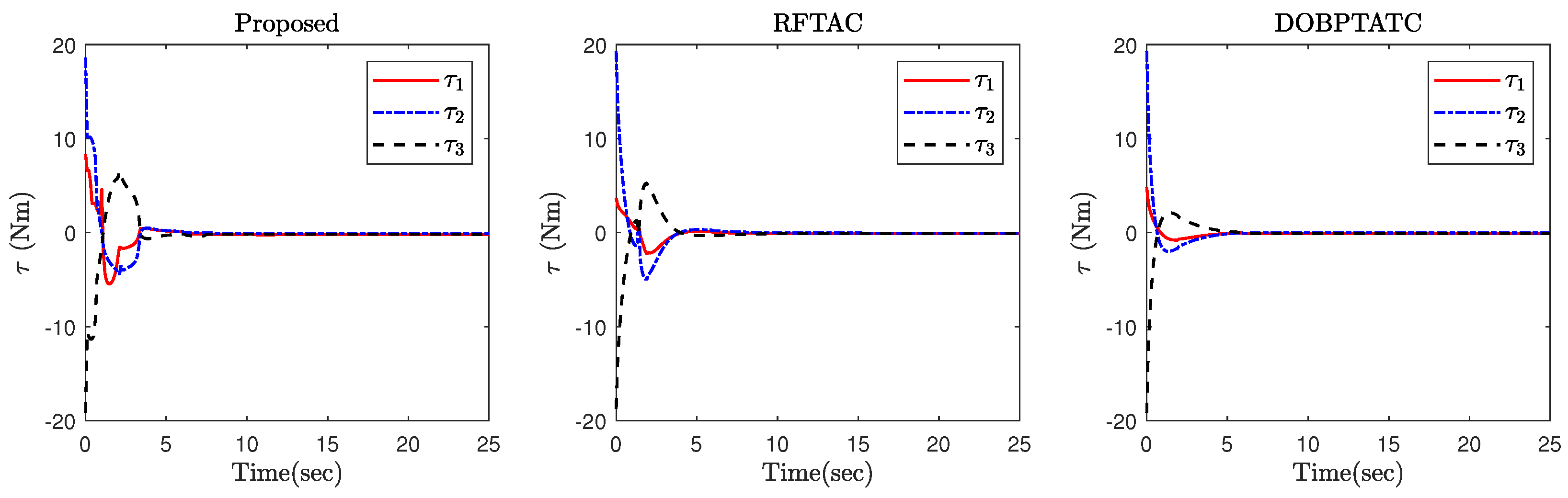
| Controller | in Steady-State | in Steady-State | Settling Time |
|---|---|---|---|
| Proposed | |||
| RFTAC | |||
| DOBPTATC |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan-Mung, N.; Golestani, M.; Hong, S.-K. Tan-Type BLF-Based Attitude Tracking Control Design for Rigid Spacecraft with Arbitrary Disturbances. Mathematics 2022, 10, 4548. https://doi.org/10.3390/math10234548
Xuan-Mung N, Golestani M, Hong S-K. Tan-Type BLF-Based Attitude Tracking Control Design for Rigid Spacecraft with Arbitrary Disturbances. Mathematics. 2022; 10(23):4548. https://doi.org/10.3390/math10234548
Chicago/Turabian StyleXuan-Mung, Nguyen, Mehdi Golestani, and Sung-Kyung Hong. 2022. "Tan-Type BLF-Based Attitude Tracking Control Design for Rigid Spacecraft with Arbitrary Disturbances" Mathematics 10, no. 23: 4548. https://doi.org/10.3390/math10234548