
Chaotic Synchronization in Mobile Robots




Abstract
:1. Introduction
- An effective fuzzy controller based on novel T3-FLSs is designed for MRs.
- The chaotic synchronization is studied for MRs.
- To better enhance the robustness of MR, in addition to complicated uncertain dynamics and reference path, some external disturbances are also considered.
- An adaptive parallel compensator is designed to improve the robustness.
- The stability and robustness of MR in a chaotic path are proved.
- The designed controller is online learned to optimize itself every sample time.
2. Formulation
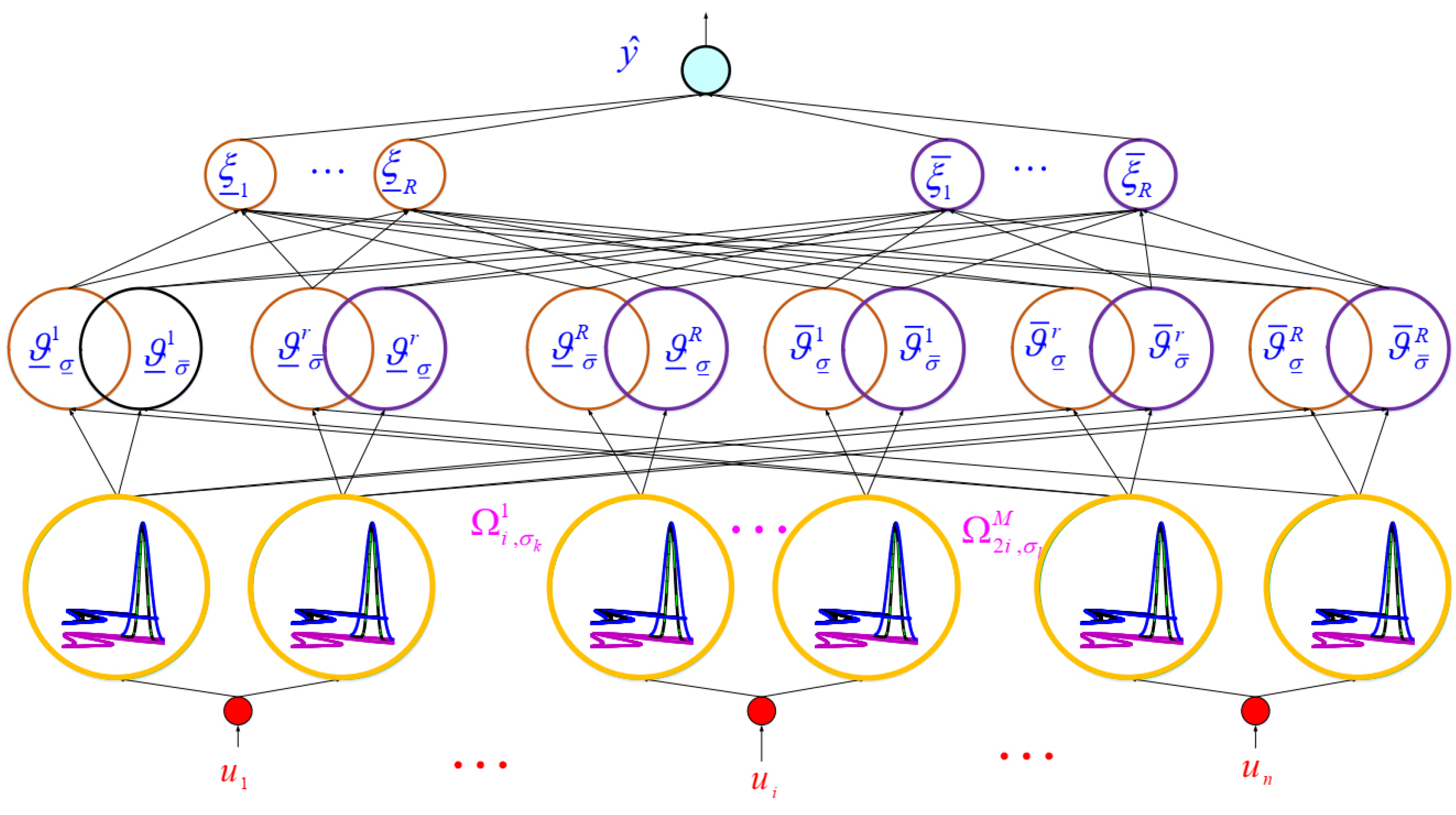
3. Type-3 FLS
- (1)
- The inputs are the states of slave system.
- (2)
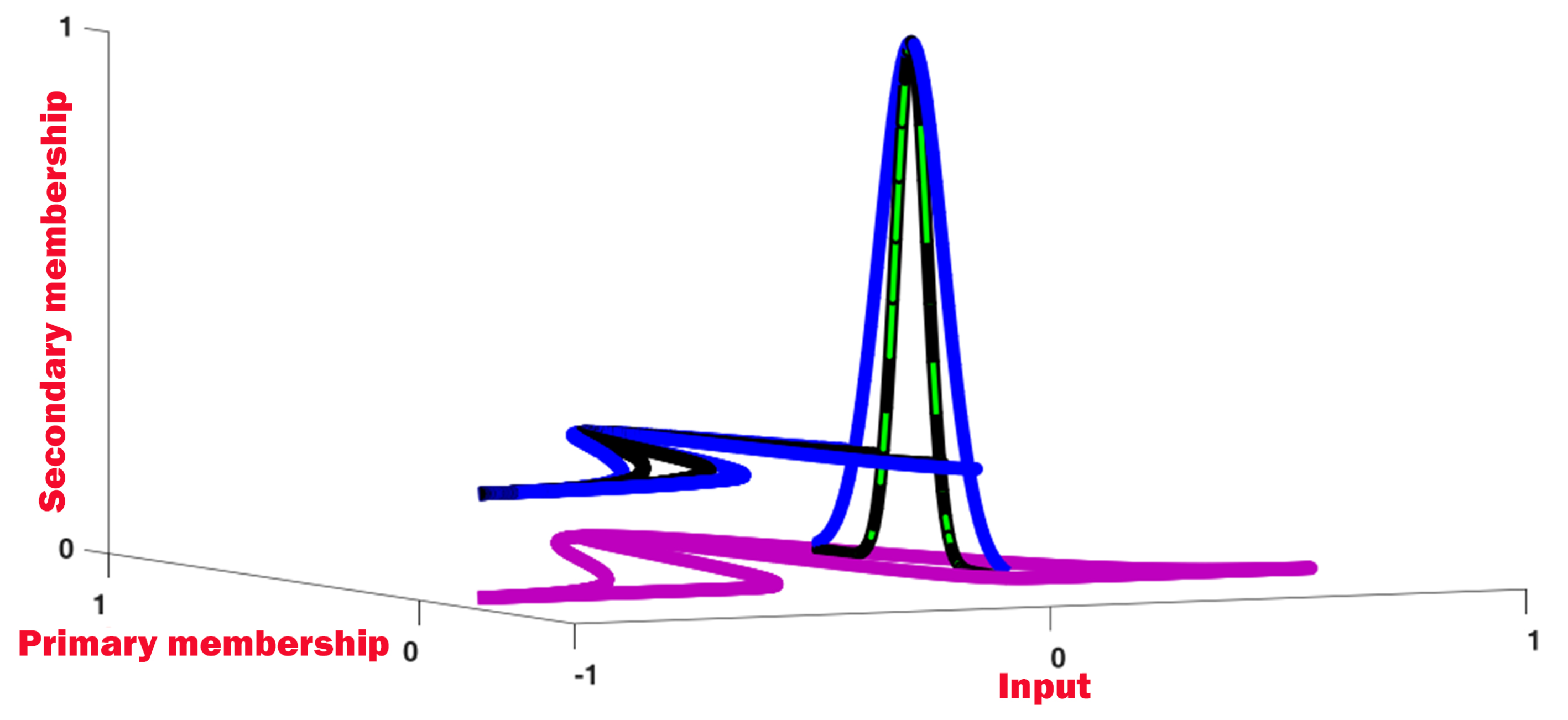
- For , and , the upper/lower memberships of M membership functions (MF) are computed as follows (see Figure 3):
- (3)
- The r-th rule is written as:where , and are r-th MF for , and , respectively. The rule firings are written as:where and denote the upper bound of firing degrees, and and represent the lower bound of firing degrees.
- (4)
4. Control Designing and Stability Analysis
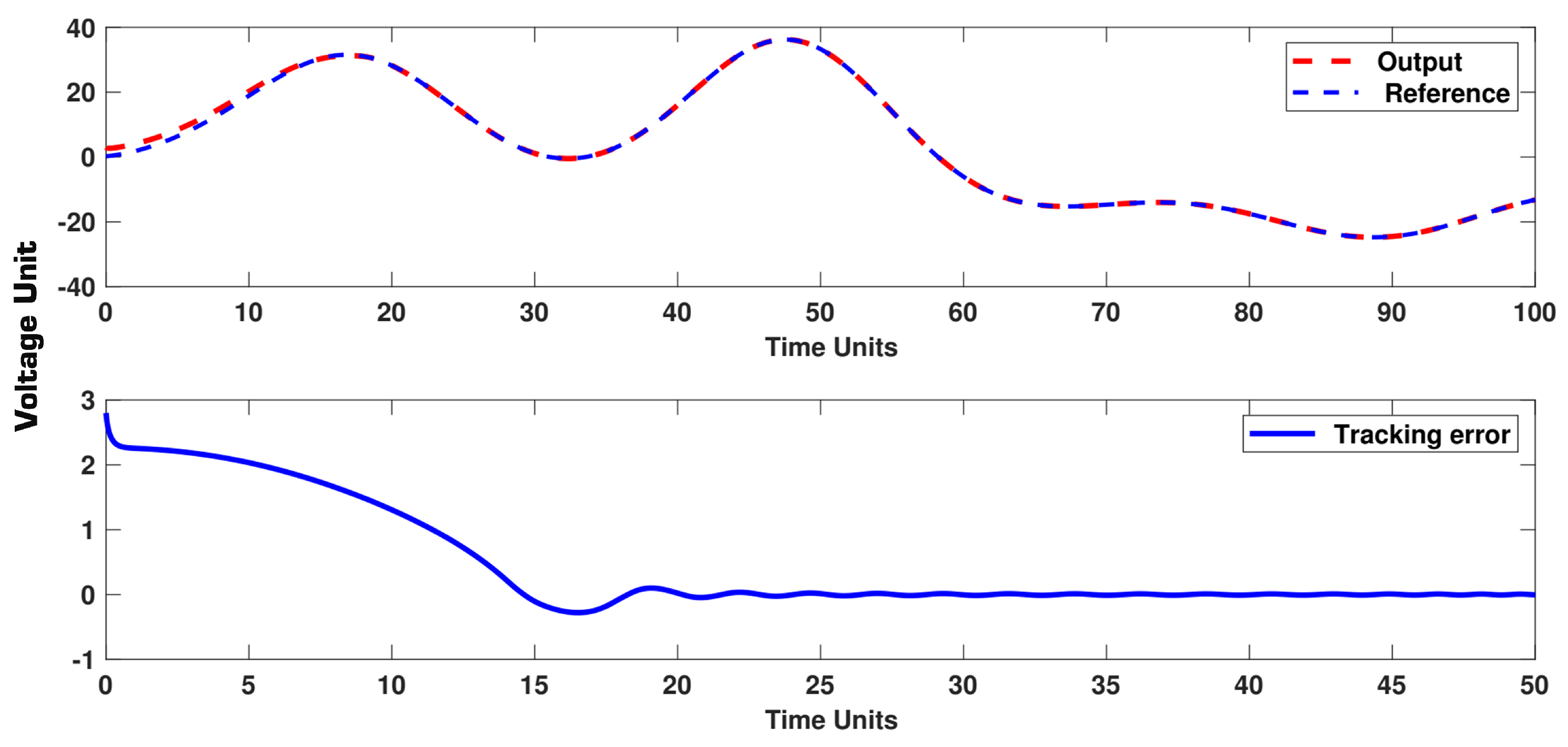
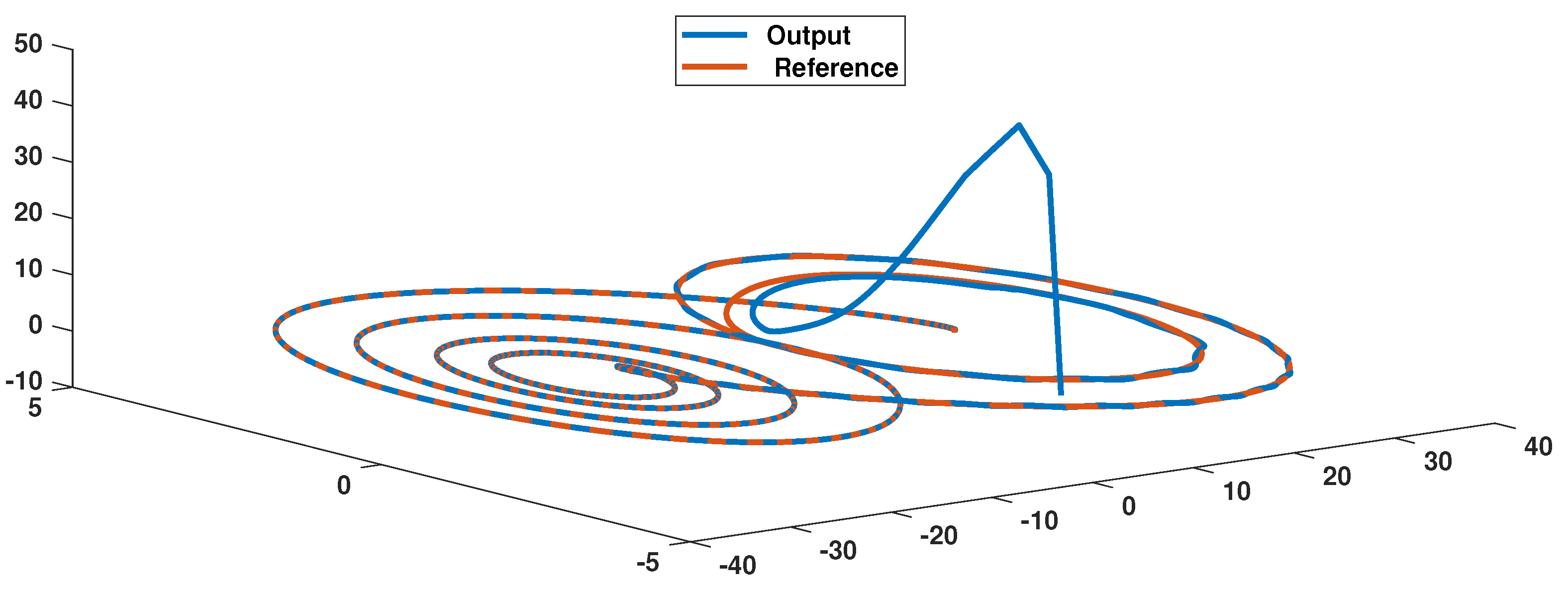
5. Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, Y.; Sheng, H.; Zhang, Y.; Wang, S.; Xiong, Z.; Ke, W. Hybrid Motion Model for Multiple Object Tracking in Mobile Devices. IEEE Internet Things J. 2022. [Google Scholar] [CrossRef]
- Lin, Y.; Song, H.; Ke, F.; Yan, W.; Liu, Z.; Cai, F. Optimal caching scheme in D2D networks with multiple robot helpers. Comput. Commun. 2022, 181, 132–142. [Google Scholar] [CrossRef]
- Gong, X.; Wang, L.; Mou, Y.; Wang, H.; Wei, X.; Zheng, W.; Yin, L. Improved Four-channel PBTDPA control strategy using force feedback bilateral teleoperation system. Int. J. Control. Autom. Syst. 2022, 20, 1002–1017. [Google Scholar] [CrossRef]
- Naik, P.A.; Zu, J.; Naik, M.U.D. Stability analysis of a fractional-order cancer model with chaotic dynamics. Int. J. Biomath. 2021, 14, 2150046. [Google Scholar] [CrossRef]
- Wang, Y.; Ji, H.; Wang, Y.; Sun, J. Stability based on PI control of three-dimensional chaotic oscillatory system via DNA chemical reaction networks. IEEE Trans. NanoBiosci. 2021, 20, 311–322. [Google Scholar] [CrossRef]
- Ma, W.; Zhang, W.; Zhang, Y. Stability and multi-pulse jumping chaotic vibrations of a rotor-active magnetic bearing system with 16-pole legs under mechanical-electric-electromagnetic excitations. Eur. J. Mech.-A/Solids 2021, 85, 104120. [Google Scholar] [CrossRef]
- Wang, Z.; Veeman, D.; Zhang, M.; Natiq, H.; Yang, R.; Hussain, I. A symmetric oscillator with multi-stability and chaotic dynamics: Bifurcations, circuit implementation, and impulsive control. Eur. Phys. J. Spec. Top. 2022, 231, 2153–2161. [Google Scholar] [CrossRef]
- Rao, R.; Zhong, S. Input-to-state stability and no-inputs stabilization of delayed feedback chaotic financial system involved in open and closed economy. Discret. Contin. Dyn. Syst.-S 2021, 14, 1375. [Google Scholar] [CrossRef] [Green Version]
- Khajehzadeh, M. Earth slope stability evaluation subjected to earthquake loading using chaotic sperm swarm optimization. Arab. J. Geosci. 2022, 15, 1–13. [Google Scholar] [CrossRef]
- Li, D.; Yu, H.; Tee, K.P.; Wu, Y.; Ge, S.S.; Lee, T.H. On time-synchronized stability and control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2450–2463. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, C.; Roohi, M. Design of a model-free adaptive sliding mode control to synchronize chaotic fractional-order systems with input saturation: An application in secure communications. J. Frankl. Inst. 2021, 358, 8109–8137. [Google Scholar] [CrossRef]
- Pal, P.; Mukherjee, V.; Alemayehu, H.; Jin, G.G.; Feyisa, G. Generalized adaptive backstepping sliding mode control for synchronizing chaotic systems with uncertainties and disturbances. Math. Comput. Simul. 2021, 190, 793–807. [Google Scholar] [CrossRef]
- Hammouch, Z.; Yavuz, M.; Özdemir, N. Numerical solutions and synchronization of a variable-order fractional chaotic system. Math. Model. Numer. Simul. Appl. 2021, 1, 11–23. [Google Scholar] [CrossRef]
- Kumar, S.; Matouk, A.E.; Chaudhary, H.; Kant, S. Control and synchronization of fractional-order chaotic satellite systems using feedback and adaptive control techniques. Int. J. Adapt. Control Signal Process. 2021, 35, 484–497. [Google Scholar] [CrossRef]
- Wu, W.; He, L.; Zhou, J.; Xuan, Z.; Arik, S. Disturbance-term-based switching event-triggered synchronization control of chaotic Lurie systems subject to a joint performance guarantee. Commun. Nonlinear Sci. Numer. Simul. 2022, 115, 106774. [Google Scholar] [CrossRef]
- Setoudeh, F.; Dezhdar, M.M.; Najafi, M. Nonlinear analysis and chaos synchronization of a memristive-based chaotic system using adaptive control technique in noisy environments. Chaos Solitons Fractals 2022, 164, 112710. [Google Scholar] [CrossRef]
- Tutueva, A.V.; Moysis, L.; Rybin, V.G.; Kopets, E.E.; Volos, C.; Butusov, D.N. Fast synchronization of symmetric Hénon maps using adaptive symmetry control. Chaos Solitons Fractals 2022, 155, 111732. [Google Scholar] [CrossRef]
- Gao, Y.P.; Liu, X.C.; Cao, C.; Han, L.H.; Lu, P.F. Optomagnonically induced RoF chaotic synchronization. New J. Phys. 2022, 24, 083022. [Google Scholar] [CrossRef]
- Doroshin, A.V. Heteroclinic chaos and its local suppression in attitude dynamics of an asymmetrical dual-spin spacecraft and gyrostat-satellites. The Part I—Main models and solutions. Commun. Nonlinear Sci. Numer. Simul. 2016, 31, 151–170. [Google Scholar] [CrossRef]
- Doroshin, A.V. Heteroclinic chaos and its local suppression in attitude dynamics of an asymmetrical dual-spin spacecraft and gyrostat-satellites. The Part II—The heteroclinic chaos investigation. Commun. Nonlinear Sci. Numer. Simul. 2016, 31, 171–196. [Google Scholar] [CrossRef]
- Doroshin, A.V. Chaos and its avoidance in spinup dynamics of an axial dual-spin spacecraft. Acta Astronaut. 2014, 94, 563–576. [Google Scholar] [CrossRef]
- Nasiri, H.; Ebadzadeh, M.M. MFRFNN: Multi-Functional Recurrent Fuzzy Neural Network for Chaotic Time Series Prediction. Neurocomputing 2022, 507, 292–310. [Google Scholar] [CrossRef]
- Balootaki, M.A.; Rahmani, H.; Moeinkhah, H.; Mohammadzadeh, A. Non-singleton fuzzy control for multi-synchronization of chaotic systems. Appl. Soft Comput. 2021, 99, 106924. [Google Scholar] [CrossRef]
- Mohamed, A.G.; Korany, N.O.; El-Khamy, S.E. New DNA coded fuzzy based (DNAFZ) S-boxes: Application to robust image encryption using hyper chaotic maps. IEEE Access 2021, 9, 14284–14305. [Google Scholar] [CrossRef]
- Golouje, Y.N.; Abtahi, S.M. Chaotic dynamics of the vertical model in vehicles and chaos control of active suspension system via the fuzzy fast terminal sliding mode control. J. Mech. Sci. Technol. 2021, 35, 31–43. [Google Scholar] [CrossRef]
- Li, J.; Cao, J.; Liu, H. State observer-based fuzzy echo state network sliding mode control for uncertain strict-feedback chaotic systems without backstepping. Chaos Solitons Fractals 2022, 162, 112442. [Google Scholar] [CrossRef]
- Labbaf Khaniki, M.A.; Tavakoli-Kakhki, M. Adaptive type-II fuzzy nonsingular fast terminal sliding mode controller using fractional-order manifold for second-order chaotic systems. Asian J. Control 2022, 24, 2395–2409. [Google Scholar] [CrossRef]
- Soleimanizadeh, A.; Nekoui, M.A. Optimal type-2 fuzzy synchronization of two different fractional-order chaotic systems with variable orders with an application to secure communication. Soft Comput. 2021, 25, 6415–6426. [Google Scholar] [CrossRef]
- Wang, J.; Liang, F.; Zhou, H.; Yang, M.; Wang, Q. Analysis of Position, Pose and Force Decoupling Characteristics of a 4-UPS/1-RPS Parallel Grinding Robot. Symmetry 2022, 14, 825. [Google Scholar] [CrossRef]
- Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N. Experimental investigation on coverage performance of a chaotic autonomous mobile robot. Robot. Auton. Syst. 2013, 61, 1314–1322. [Google Scholar] [CrossRef]
- Ashraf, F.A. Implementation of the chaotic mobile robot for the complex missions. J. Autom. Mob. Robot. Intell. Syst. 2012, 6, 8–12. [Google Scholar]
- Tlelo-Cuautle, E.; Ramos-López, H.C.; Sánchez-Sánchez, M.; Pano-Azucena, A.D.; Sánchez-Gaspariano, L.A.; Núñez-Pérez, J.C.; Camas-Anzueto, J.L. Application of a chaotic oscillator in an autonomous mobile robot. J. Electr. Eng. 2014, 65, 157. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Song, Y.; Wang, F.; Wang, Z.; Li, Y. A bounded strategy of the mobile robot coverage path planning based on Lorenz chaotic system. Int. J. Adv. Robot. Syst. 2016, 13, 107. [Google Scholar] [CrossRef] [Green Version]
- Li, C.H.; Song, Y.; Wang, F.Y.; Wang, Z.Q.; Li, Y.B. A chaotic coverage path planner for the mobile robot based on the Chebyshev map for special missions. Front. Inf. Technol. Electron. Eng. 2017, 18, 1305–1319. [Google Scholar] [CrossRef]
- Sambas, A.; Vaidyanathan, S.; Mamat, M.; Sanjaya, W.; Rahayu, D.S. A.; Vaidyanathan, S.; Mamat, M.; Sanjaya, W.; Rahayu, D.S. A 3-D novel jerk chaotic system and its application in secure communication system and mobile robot navigation. In Advances and Applications in Chaotic Systems; Springer: Cham, Switzerland, 2016; pp. 283–310. [Google Scholar]
- Cetina-Denis, J.J.; Lopéz-Gutiérrez, R.M.; Cruz-Hernández, C.; Arellano-Delgado, A. Design of a Chaotic Trajectory Generator Algorithm for Mobile Robots. Appl. Sci. 2022, 12, 2587. [Google Scholar] [CrossRef]
- Lian, J.; Yu, W.; Xiao, K.; Liu, W. Cubic spline interpolation-based robot path planning using a chaotic adaptive particle swarm optimization algorithm. Math. Probl. Eng. 2020, 2020, 1849240. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Zhang, W. An interval type-3 fuzzy system and a new online fractional-order learning algorithm: Theory and practice. IEEE Trans. Fuzzy Syst. 2019, 28, 1940–1950. [Google Scholar] [CrossRef]
- Sastry, S. Lyapunov stability theory. In Nonlinear Systems; Springer: New York, NY, USA, 1999; pp. 182–234. [Google Scholar]
- Zhang, J.; Zhu, C.; Zheng, L.; Xu, K. ROSEFusion: Random optimization for online dense reconstruction under fast camera motion. ACM Trans. Graph. (TOG) 2021, 40, 1–17. [Google Scholar]
- Zhang, J.; Tang, Y.; Wang, H.; Xu, K. ASRO-DIO: Active Subspace Random Optimization Based Depth Inertial Odometry. IEEE Trans. Robot. 2022. [Google Scholar] [CrossRef]
- Zhao, H.; Zhu, C.; Xu, X.; Huang, H.; Xu, K. Learning practically feasible policies for online 3D bin packing. Sci. China Inf. Sci. 2022, 65, 1–17. [Google Scholar] [CrossRef]
- She, Q.; Hu, R.; Xu, J.; Liu, M.; Xu, K.; Huang, H. Learning High-DOF Reaching-and-Grasping via Dynamic Representation of Gripper-Object Interaction. arXiv 2022, arXiv:2204.13998. [Google Scholar] [CrossRef]
- Wang, J.; Tian, J.; Zhang, X.; Yang, B.; Liu, S.; Yin, L.; Zheng, W. Control of Time Delay Force Feedback Teleoperation System With Finite Time Convergence. Front. Neurorobot. 2022, 16, 877069. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.; Ban, Y.; Zhang, X.; Yang, B.; Yin, L.; Liu, S.; Zheng, W. Adaptive control of time delay teleoperation system with uncertain dynamics. Front. Neurorobot. 2022, 16, 928863. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Wang, D.; Zhang, C.; Mohammadzadeh, A. Chaotic Synchronization in Mobile Robots. Mathematics 2022, 10, 4568. https://doi.org/10.3390/math10234568
Wu L, Wang D, Zhang C, Mohammadzadeh A. Chaotic Synchronization in Mobile Robots. Mathematics. 2022; 10(23):4568. https://doi.org/10.3390/math10234568
Chicago/Turabian StyleWu, Lili, Dongyun Wang, Chunwei Zhang, and Ardashir Mohammadzadeh. 2022. "Chaotic Synchronization in Mobile Robots" Mathematics 10, no. 23: 4568. https://doi.org/10.3390/math10234568
APA StyleWu, L., Wang, D., Zhang, C., & Mohammadzadeh, A. (2022). Chaotic Synchronization in Mobile Robots. Mathematics, 10(23), 4568. https://doi.org/10.3390/math10234568