


A Branch-and-Bound Algorithm for the Bi-Objective Quay Crane Scheduling Problem Based on Efficiency and Energy


Abstract
:1. Introduction
2. Literature Review
2.1. Quay Crane Scheduling at Container Terminals
2.2. Energy Saving and Emission Reduction at Container Terminals
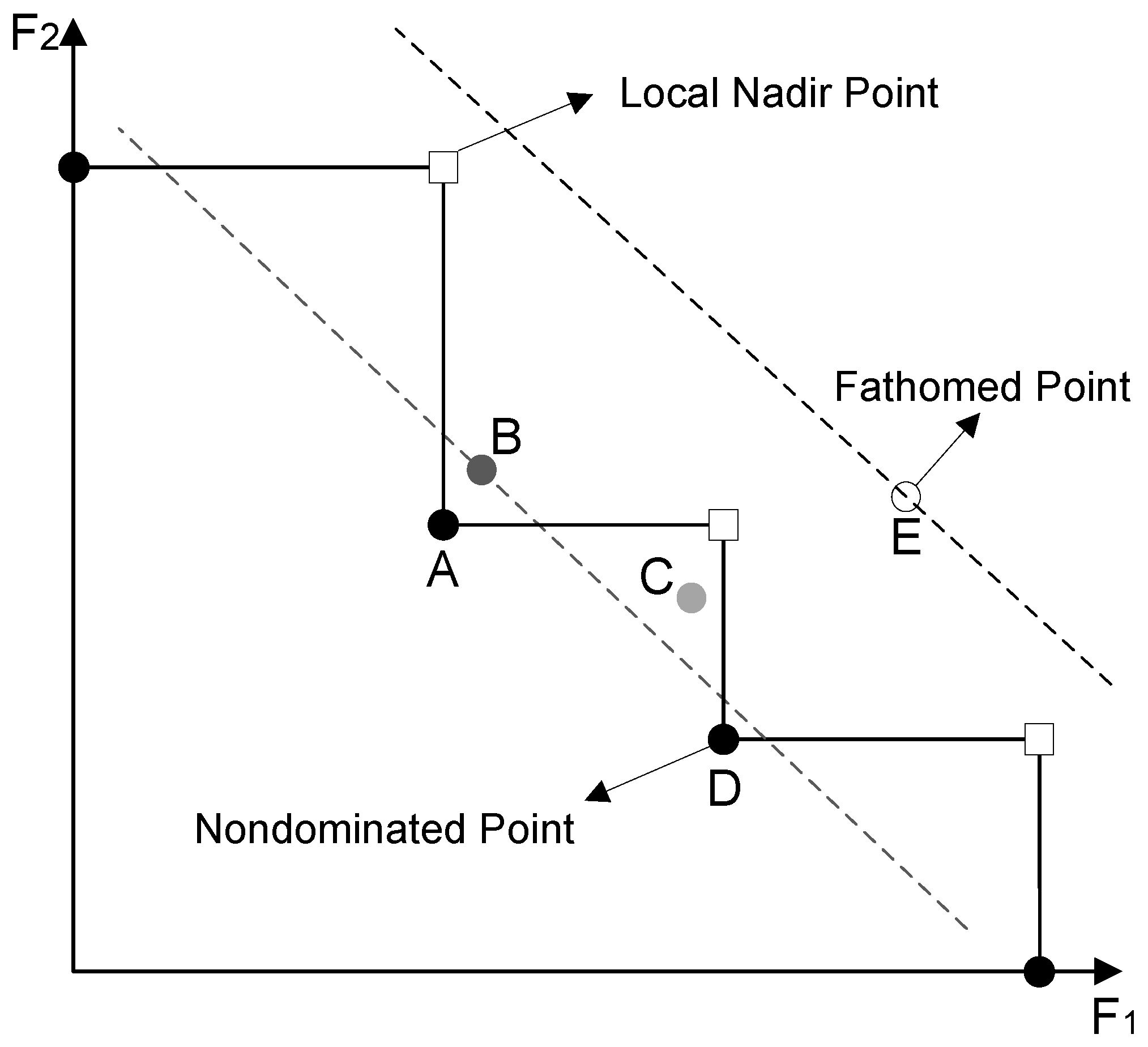
2.3. Pareto-Optimization Approach
2.4. Contribution
3. Problem Formulation
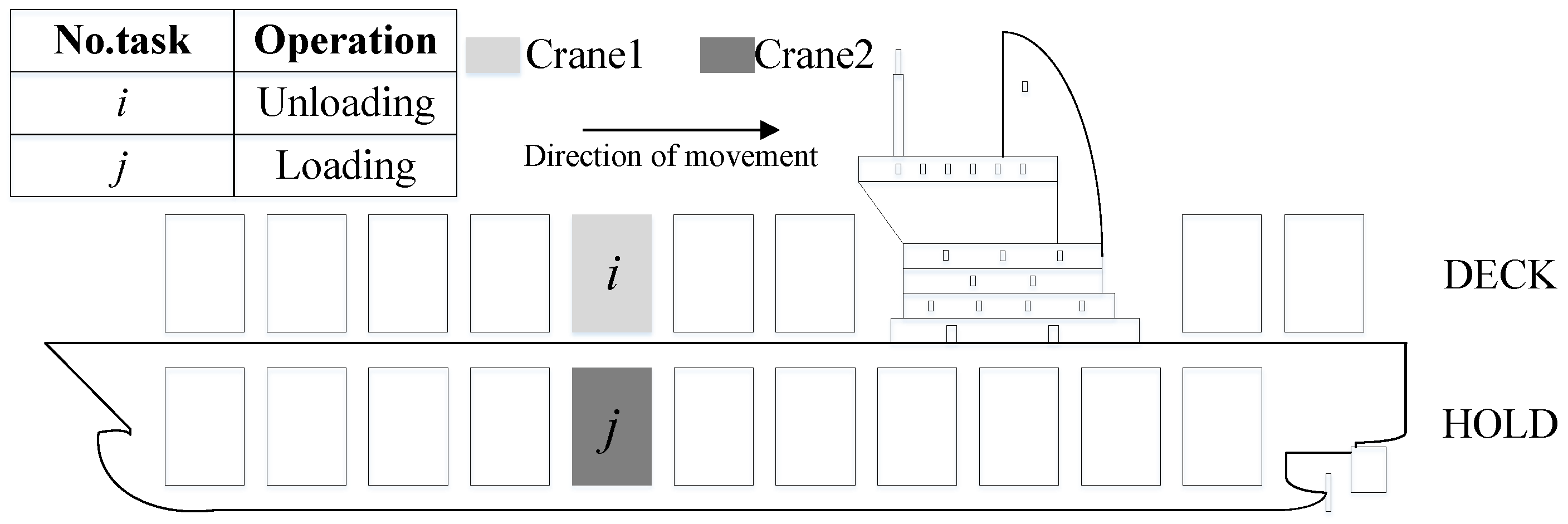
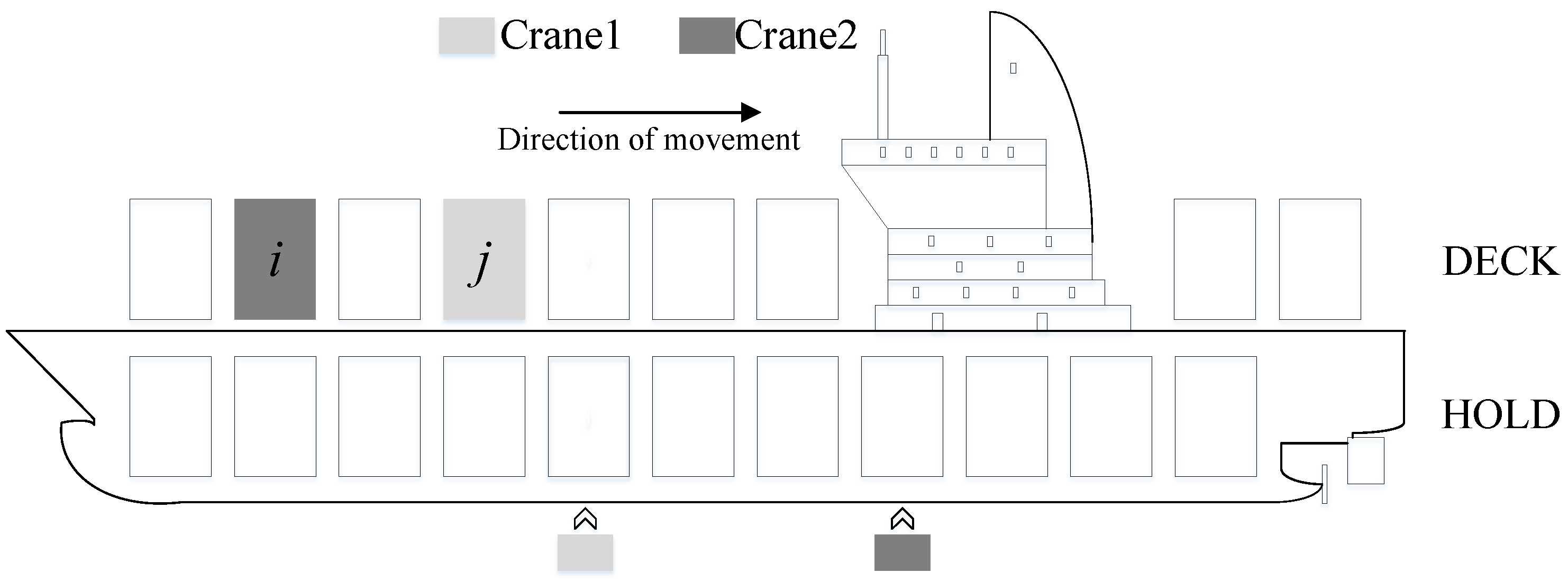
3.1. Quay Crane Scheduling with Energy Consumption
3.2. A Bi-Objective Model
3.3. A Reinforcement Model
4. Solution Method
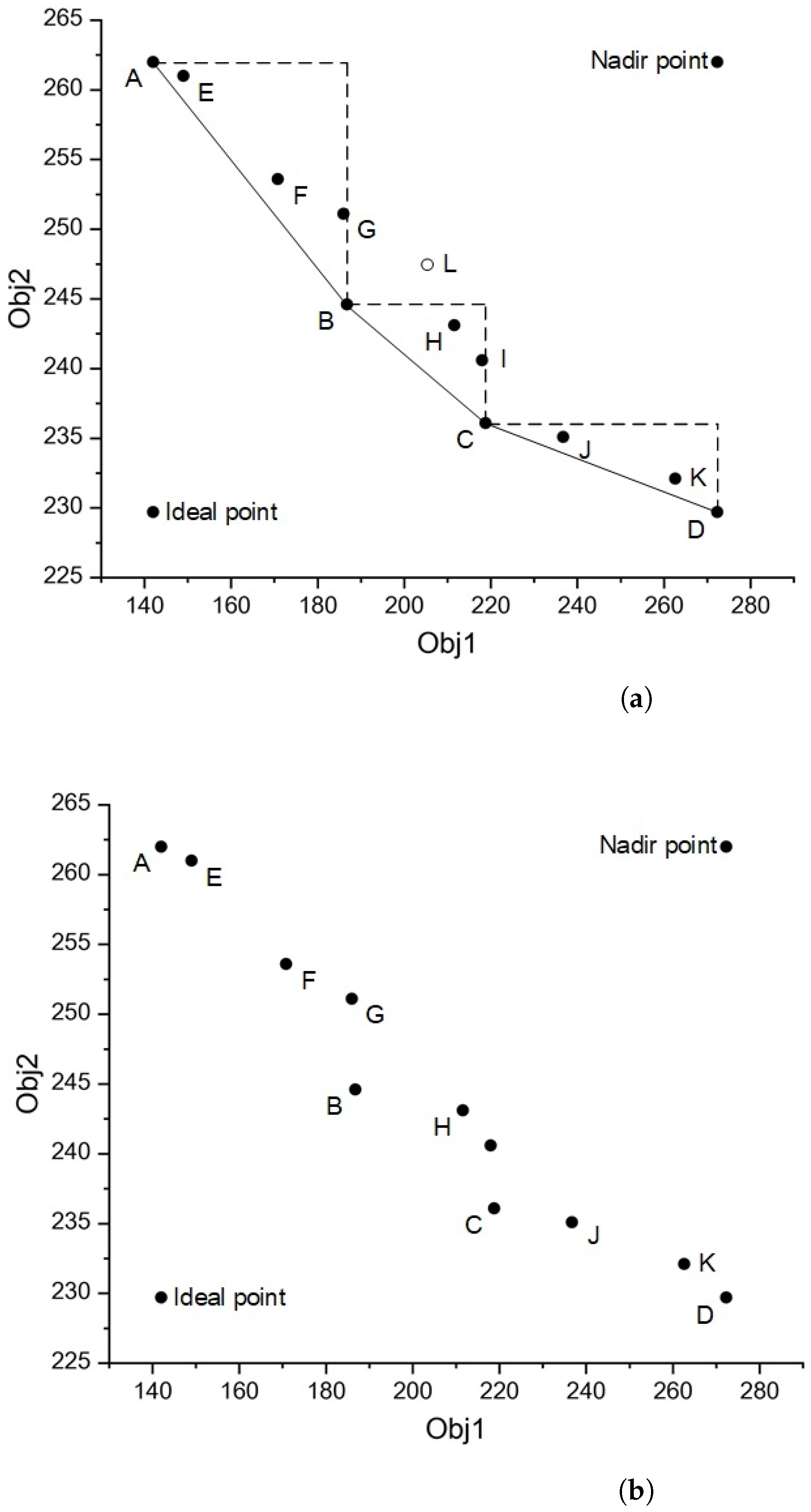
4.1. Lexicographical Sorting
4.2. Lower Bounds
4.2.1. Lower Bounds for
4.2.2. Lower Bounds for
4.3. Upper Bounds
4.4. Branching Criteria
4.5. Fathoming Criterion
5. Results
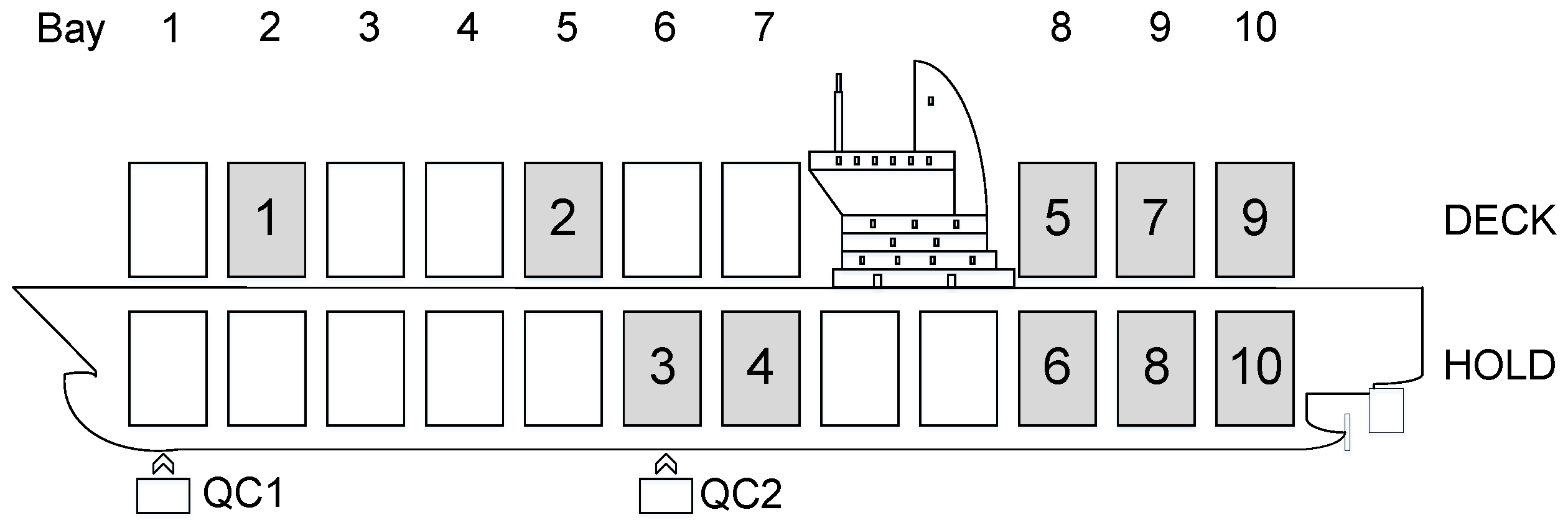
5.1. An Illustrative Case Study
5.2. Simulation Experiment
5.2.1. Generation of the Test Instances
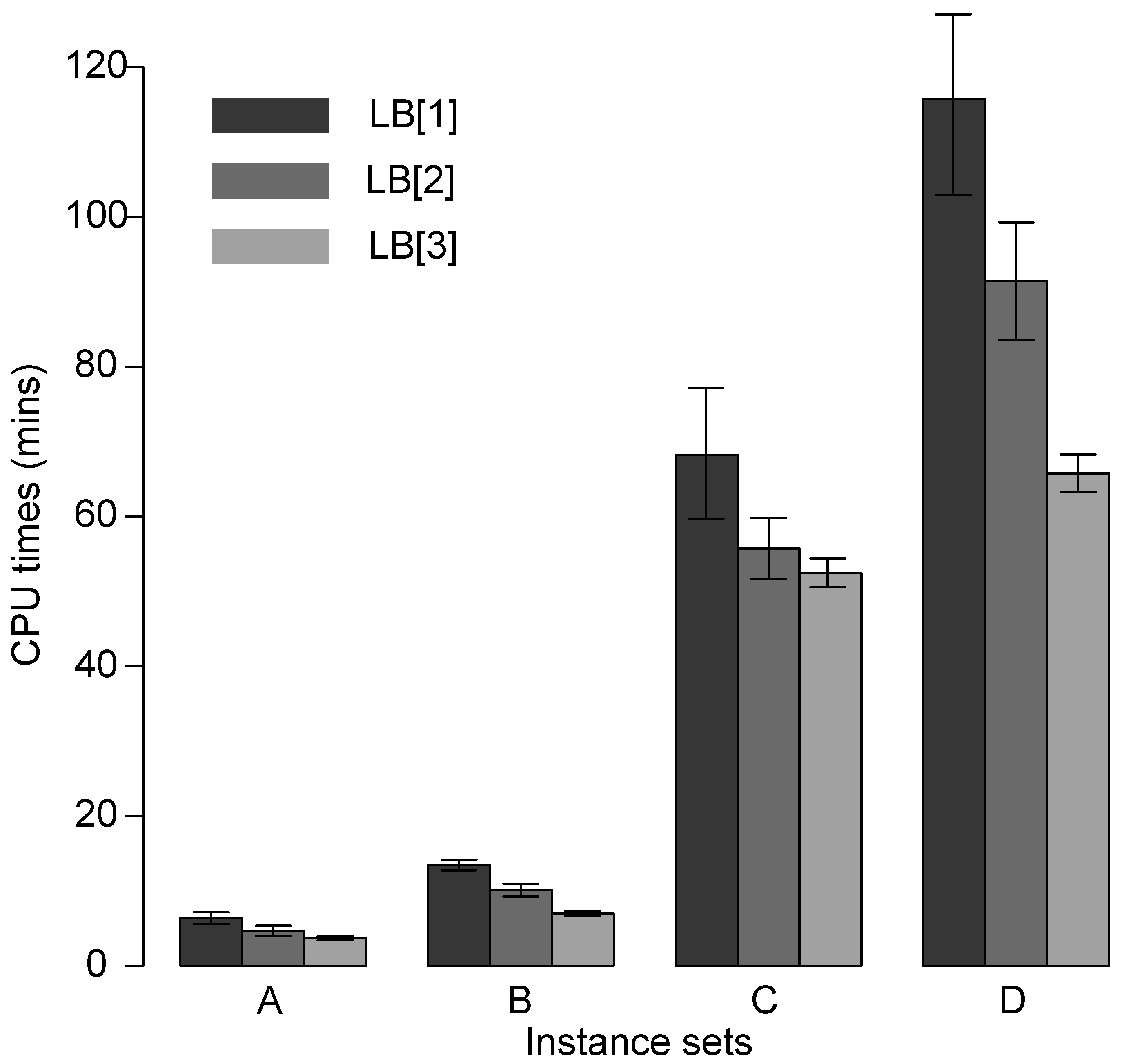
5.2.2. Quality of Lower Bounds
5.2.3. Performance Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BaB | branch-and-bound |
| GHG | greenhouse gas |
| IMO | International Maritime Organization |
| MILP | mixed integer linear programming |
| MOPSO | multi-objective particle swarm optimization |
| NRPM | non-numerical ranking preferences method |
| QCSP | quay crane scheduling problem |
| QCSPEC | quay crane scheduling problem with energy consumption |
| TEU | twenty-foot equivalent unit |
References
- UNCTAD. Review of Maritime Transport 2021. 2021. Available online: https://unctad.org/system/files/official-document/rmt2021_en_0.pdf (accessed on 1 January 2022).
- Kong, L.; Ji, M.; Gao, Z. An exact algorithm for scheduling tandem quay crane operations in container terminals. Transp. Res. Part E Logist. Transp. Rev. 2022, 168, 102949. [Google Scholar] [CrossRef]
- Yue, L.; Fan, H. Dynamic Scheduling and Path Planning of Automated Guided Vehicles in Automatic Container Terminal. IEEE/CAA J. Autom. Sin. 2022, 9, 2005–2019. [Google Scholar] [CrossRef]
- Yan, S.y.; Wang, C.Y.; Wei, C.S. Manpower supply planning for routine policing duties. J. Chin. Inst. Eng. 2022, 45, 669–678. [Google Scholar] [CrossRef]
- Pinedo, M.L. Scheduling; Springer: Berlin/Heidelberg, Germany, 2012; Volume 29. [Google Scholar]
- UNCTAD. Third IMO Greenhouse Gas Study 2014. 2014. Available online: https://www.escholar.manchester.ac.uk/api/datastream?publicationPid=uk-ac-man-scw:266097&datastreamId=FULL-TEXT.PDF (accessed on 1 January 2022).
- Villalba, G.; Gemechu, E.D. Estimating GHG emissions of marine ports—The case of Barcelona. Energy Policy 2011, 39, 1363–1368. [Google Scholar] [CrossRef]
- Liu, D.; Ge, Y.E. Modeling assignment of quay cranes using queueing theory for minimizing CO2 emission at a container terminal. Transp. Res. Part D Transp. Environ. 2018, 61, 140–151. [Google Scholar] [CrossRef]
- Daganzo, C.F. The crane scheduling problem. Transp. Res. Part B Methodol. 1989, 23, 159–175. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2010, 202, 615–627. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A follow-up survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2015, 244, 675–689. [Google Scholar] [CrossRef]
- Liu, J.; Wan, Y.w.; Wang, L. Quay crane scheduling at container terminals to minimize the maximum relative tardiness of vessel departures. Nav. Res. Logist. (NRL) 2006, 53, 60–74. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A fast heuristic for quay crane scheduling with interference constraints. J. Sched. 2009, 12, 345–360. [Google Scholar] [CrossRef]
- Meisel, F. The quay crane scheduling problem with time windows. Nav. Res. Logist. (NRL) 2011, 58, 619–636. [Google Scholar] [CrossRef]
- Legato, P.; Trunfio, R.; Meisel, F. Modeling and solving rich quay crane scheduling problems. Comput. Oper. Res. 2012, 39, 2063–2078. [Google Scholar] [CrossRef]
- Legato, P.; Trunfio, R. A local branching-based algorithm for the quay crane scheduling problem under unidirectional schedules. 4OR 2014, 12, 123–156. [Google Scholar] [CrossRef]
- Chen, J.H.; Lee, D.H.; Goh, M. An effective mathematical formulation for the unidirectional cluster-based quay crane scheduling problem. Eur. J. Oper. Res. 2014, 232, 198–208. [Google Scholar] [CrossRef]
- Chen, J.H.; Bierlaire, M. The study of the unidirectional quay crane scheduling problem: Complexity and risk-aversion. Eur. J. Oper. Res. 2017, 260, 613–624. [Google Scholar] [CrossRef]
- Ma, S.; Li, H.; Zhu, N.; Fu, C. Stochastic programming approach for unidirectional quay crane scheduling problem with uncertainty. J. Sched. 2021, 24, 137–174. [Google Scholar] [CrossRef]
- Xia, J.; Wang, K.; Wang, S. Drone scheduling to monitor vessels in emission control areas. Transp. Res. Part B Methodol. 2019, 119, 174–196. [Google Scholar] [CrossRef]
- Lai, X.; Ng, C.T.; Wan, C.L.J. Bi-objective evacuation problem in ships or buildings. Int. J. Shipp. Transp. Logist. 2022, 14, 172–192. [Google Scholar] [CrossRef]
- Psaraftis, H.N.; Kontovas, C.A. Speed models for energy-efficient maritime transportation: A taxonomy and survey. Transp. Res. Part C Emerg. Technol. 2013, 26, 331–351. [Google Scholar] [CrossRef]
- Mansouri, S.A.; Lee, H.; Aluko, O. Multi-objective decision support to enhance environmental sustainability in maritime shipping: A review and future directions. Transp. Res. Part E Logist. Transp. Rev. 2015, 78, 3–18. [Google Scholar] [CrossRef]
- Chang, D.; Jiang, Z.; Yan, W.; He, J. Integrating berth allocation and quay crane assignments. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 975–990. [Google Scholar] [CrossRef]
- Esmemr, S.; Ceti, I.B.; Tuna, O. A Simulation for Optimum Terminal Truck Number in a Turkish Port Based on Lean and Green Concept. Asian J. Shipp. Logist. 2010, 26, 277–296. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Govindan, K.; Golias, M.M. Reducing truck emissions at container terminals in a low carbon economy: Proposal of a queueing-based bi-objective model for optimizing truck arrival pattern. Transp. Res. Part E Logist. Transp. Rev. 2013, 55, 3–22. [Google Scholar] [CrossRef]
- He, J.; Huang, Y.; Yan, W. Yard crane scheduling in a container terminal for the trade-off between efficiency and energy consumption. Adv. Eng. Inform. 2015, 29, 59–75. [Google Scholar] [CrossRef]
- He, J.; Huang, Y.; Yan, W.; Wang, S. Integrated internal truck, yard crane and quay crane scheduling in a container terminal considering energy consumption. Expert Syst. Appl. 2015, 42, 2464–2487. [Google Scholar] [CrossRef]
- He, J. Berth allocation and quay crane assignment in a container terminal for the trade-off between time-saving and energy-saving. Adv. Eng. Inform. 2016, 30, 390–405. [Google Scholar] [CrossRef]
- Sha, M.; Zhang, T.; Lan, Y.; Zhou, X.; Qin, T.; Yu, D.; Chen, K. Scheduling optimization of yard cranes with minimal energy consumption at container terminals. Comput. Ind. Eng. 2017, 113, 704–713. [Google Scholar] [CrossRef]
- Tan, C.; Yan, W.; Yue, J. Quay crane scheduling in automated container terminal for the trade-off between operation efficiency and energy consumption. Adv. Eng. Inform. 2021, 48, 101285. [Google Scholar] [CrossRef]
- Ehrgott, M.; Wiecek, M.M. Mutiobjective Programming. In Multiple Criteria Decision Analysis: State of the Art Surveys; Springer New York: New York, NY, USA, 2005; pp. 667–708. [Google Scholar]
- Leitner, M.; Ljubić, I.; Sinnl, M. A Computational Study of Exact Approaches for the Bi-Objective Prize-Collecting Steiner Tree Problem. INFORMS J. Comput. 2015, 27, 118–134. [Google Scholar] [CrossRef]
- Boland, N.; Charkhgard, H.; Savelsbergh, M. A criterion space search algorithm for biobjective integer programming: The balanced box method. INFORMS J. Comput. 2015, 27, 735–754. [Google Scholar] [CrossRef]
- Parragh, S.N.; Tricoire, F. Branch-and-bound for bi-objective integer programming. INFORMS J. Comput. 2019, 31, 805–822. [Google Scholar] [CrossRef]
- Glize, E.; Jozefowiez, N.; Ngueveu, S.U. An ε-constraint column generation-and-enumeration algorithm for Bi-Objective Vehicle Routing Problems. Comput. Oper. Res. 2022, 138, 105570. [Google Scholar] [CrossRef]
- Haimes, Y. On a bicriterion formulation of the problems of integrated system identification and system optimization. IEEE Trans. Syst. Man Cybern. 1971, 1, 296–297. [Google Scholar]
- Mavrotas, G. Effective implementation of the ε-constraint method in multi-objective mathematical programming problems. Appl. Math. Comput. 2009, 213, 455–465. [Google Scholar] [CrossRef]
- Ehrgott, M.; Ruzika, S. Improved ε-constraint method for multiobjective programming. J. Optim. Theory Appl. 2008, 138, 375–396. [Google Scholar] [CrossRef]
- Mavrotas, G.; Diakoulaki, D. A branch and bound algorithm for mixed zero-one multiple objective linear programming. Eur. J. Oper. Res. 1998, 107, 530–541. [Google Scholar] [CrossRef]
- Mavrotas, G.; Diakoulaki, D. Multi-criteria branch and bound: A vector maximization algorithm for mixed 0-1 multiple objective linear programming. Appl. Math. Comput. 2005, 171, 53–71. [Google Scholar] [CrossRef]
- Vincent, T.; Seipp, F.; Ruzika, S.; Przybylski, A.; Gandibleux, X. Multiple objective branch and bound for mixed 0-1 linear programming: Corrections and improvements for the biobjective case. Comput. Oper. Res. 2013, 40, 498–509. [Google Scholar] [CrossRef]
- Stidsen, T.; Andersen, K.A.; Dammann, B. A Branch and Bound Algorithm for a Class of Biobjective Mixed Integer Programs. Manag. Sci. 2014, 60, 1009–1032. [Google Scholar] [CrossRef]
- Halffmann, P.; Schäfer, L.E.; Dächert, K.; Klamroth, K.; Ruzika, S. Exact algorithms for multiobjective linear optimization problems with integer variables: A state of the art survey. J.-Multi-Criteria Decis. Anal. 2022, 29, 341–363. [Google Scholar] [CrossRef]
- Kim, K.H.; Park, Y.M. A crane scheduling method for port container terminals. Eur. J. Oper. Res. 2004, 156, 752–768. [Google Scholar] [CrossRef]
- Sammarra, M.; Cordeau, J.F.; Laporte, G.; Monaco, M.F. A tabu search heuristic for the quay crane scheduling problem. J. Sched. 2007, 10, 327–336. [Google Scholar] [CrossRef]
- Taboada, H.A.; Coit, D.W. Multi-objective scheduling problems: Determination of pruned Pareto sets. IIE Trans. 2008, 40, 552–564. [Google Scholar] [CrossRef]
- Chankong, V.; Haimes, Y.Y. Multiobjective Decision Making: Theory and Methodology; Courier Dover Publications: Mineola, NY, USA, 2008. [Google Scholar]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Yarpiz. Mostapha Kalami Heris, Multi-Objective PSO in MATLAB. 2015. Available online: https://yarpiz.com/59/ypea121-mopso (accessed on 1 January 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Problem | Objective | Method |
|---|---|---|---|
| Chang et al. [24] | BAP & QCAP | Time & Energy | Weighted sum |
| Chen et al. [26] | TAP | Time & Emissions | Heuristics |
| He et al. [27] | YCSP | Time & Energy | Weighted sum |
| He et al. [28] | ISP | Time & Energy | Weighted sum |
| He [29] | BAP & QCAP | Time & Energy | Weighted sum |
| Sha et al. [30] | YCSP | Energy | Data fitting |
| Liu and Ge [8] | QCAP | Emissions | Queuing |
| Tan et al. [31] | AQCSP | Time & Energy | Weighted sum |
| This paper | QCSP | Time & Energy | BaB |
| Indices | |
| Indices of tasks, which are ordered in increasing order of their relative locations in the direction of ship bay indices | |
| Index of quay cranes, which are also ordered in increasing order of their relative locations | |
| Sets of Indices | |
| Set of all tasks | |
| Q | Set of all quay cranes |
| B | Set of all ship-bays |
| Set of all pairs of tasks with a precedence relationship | |
| Set of all pairs of tasks that cannot be performed simultaneously | |
| Parameters | |
| Location of task i (in ship-bay number) | |
| Processing time of task i if it is processed by crane k | |
| Energy consumption of task i if it is processed by crane k | |
| Earliest available time of quay crane k | |
| Travel time of crane k between two adjacent ship bays | |
| Travel time of crane k from the location of task i to the location of task j; | |
| Safety distance to be maintained between adjacent cranes | |
| Smallest allowed difference between bay positions of cranes v and w; | |
| Time span when handling two tasks i and j by two cranes v and w that must be separated | |
| Energy consumption per unit time of crane k in a non-working state (waiting or travel) | |
| Decision Variables | |
| Binary variables: 1 if crane k performs task j immediately after performing task i; 0 otherwise | |
| Binary variables: 1 if task i is assigned to crane k; 0 otherwise | |
| Binary variables: 1 if task j starts later than the completion time of task i; 0 otherwise | |
| d | Binary variable: 1 if all cranes move in the direction of bay increase; 0 otherwise |
| Continuous variables: Waiting time that occurs when crane k has completed task i and will perform task j | |
| Continuous variables: Travel time of crane k between task i and task j | |
| Continuous variables: Completion time of task i | |
| Continuous variables: Completion time of crane k | |
| Continuous variables: Completion time of the ship | |
| Number of Tasks ; Number of Bays | ||||||||||
| Task index i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Bay location | 2 | 5 | 6 | 7 | 8 | 8 | 9 | 9 | 10 | 10 |
| Processing time | 1 | 32 | 50 | 13 | 33 | 26 | 55 | 4 | 30 | 7 |
| Processing time | 7 | 25 | 60 | 10 | 39 | 20 | 50 | 14 | 25 | 15 |
| Energy consumption | 5 | 20 | 60 | 25 | 13 | 30 | 40 | 14 | 20 | 17 |
| Energy consumption | 7 | 17 | 55 | 20 | 20 | 26 | 50 | 5 | 25 | 10 |
| Precedence relations | ||||||||||
| Non-simultaneous relations | ||||||||||
| Number of Cranes ; Safety Margin | ||||||||||
| Crane index k | 1 | 2 | ||||||||
| Ready time | 0 | 10 | ||||||||
| Initial position | 1 | 6 | ||||||||
| Movement speed | 1 | 0.9 | ||||||||
| Unit energy consumption | 0.9 | 1 | ||||||||
| Set | Number of Tasks n | Number of Bays m | Number of Cranes q | Number of Instances |
|---|---|---|---|---|
| A | 10 | 10 | 2 | 10 |
| B | 15 | 15 | 2 | 10 |
| C | 20 | 20 | 3 | 10 |
| D | 25 | 25 | 3 | 10 |
| BaB | -Constraint | MOPSO | ||||||
|---|---|---|---|---|---|---|---|---|
| Set | Size () | Statistices | RoP | Time | RoP | Time | RoP | Time |
| A | mean | 100.00% | 2.49 | 100.00% | 3.62 | 82.11% | 0.95 | |
| median | 100.00% | 2.41 | 100.00% | 3.71 | 83.91% | 1.02 | ||
| max | 100.00% | 2.94 | 100.00% | 3.98 | 92.95% | 1.27 | ||
| B | mean | 100.00% | 7.06 | 100.00% | 23.50 | 57.85% | 1.70 | |
| median | 100.00% | 6.96 | 100.00% | 23.67 | 56.58% | 1.68 | ||
| max | 100.00% | 8.23 | 100.00% | 25.89 | 66.96% | 1.99 | ||
| C | mean | 100.00% | 55.07 | 0.00% | 120.00 | 38.52% | 2.54 | |
| median | 100.00% | 54.86 | 0.00% | 120.00 | 37.36% | 2.60 | ||
| max | 100.00% | 59.14 | 0.00% | 120.00 | 44.86% | 2.76 | ||
| D | mean | 100.00% | 70.31 | 0.00% | 120.00 | 9.71% | 3.06 | |
| median | 100.00% | 70.15 | 0.00% | 120.00 | 10.15% | 3.12 | ||
| max | 100.00% | 75.74 | 0.00% | 120.00 | 13.95% | 3.51 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Li, X. A Branch-and-Bound Algorithm for the Bi-Objective Quay Crane Scheduling Problem Based on Efficiency and Energy. Mathematics 2022, 10, 4705. https://doi.org/10.3390/math10244705
Li H, Li X. A Branch-and-Bound Algorithm for the Bi-Objective Quay Crane Scheduling Problem Based on Efficiency and Energy. Mathematics. 2022; 10(24):4705. https://doi.org/10.3390/math10244705
Chicago/Turabian StyleLi, Hongming, and Xintao Li. 2022. "A Branch-and-Bound Algorithm for the Bi-Objective Quay Crane Scheduling Problem Based on Efficiency and Energy" Mathematics 10, no. 24: 4705. https://doi.org/10.3390/math10244705
APA StyleLi, H., & Li, X. (2022). A Branch-and-Bound Algorithm for the Bi-Objective Quay Crane Scheduling Problem Based on Efficiency and Energy. Mathematics, 10(24), 4705. https://doi.org/10.3390/math10244705