
Effect of a Novel Tooth Pitting Model on Mesh Stiffness and Vibration Response of Spur Gears



Abstract
:1. Introduction
2. Model of Tooth Pitting
3. Calculation of TVMS
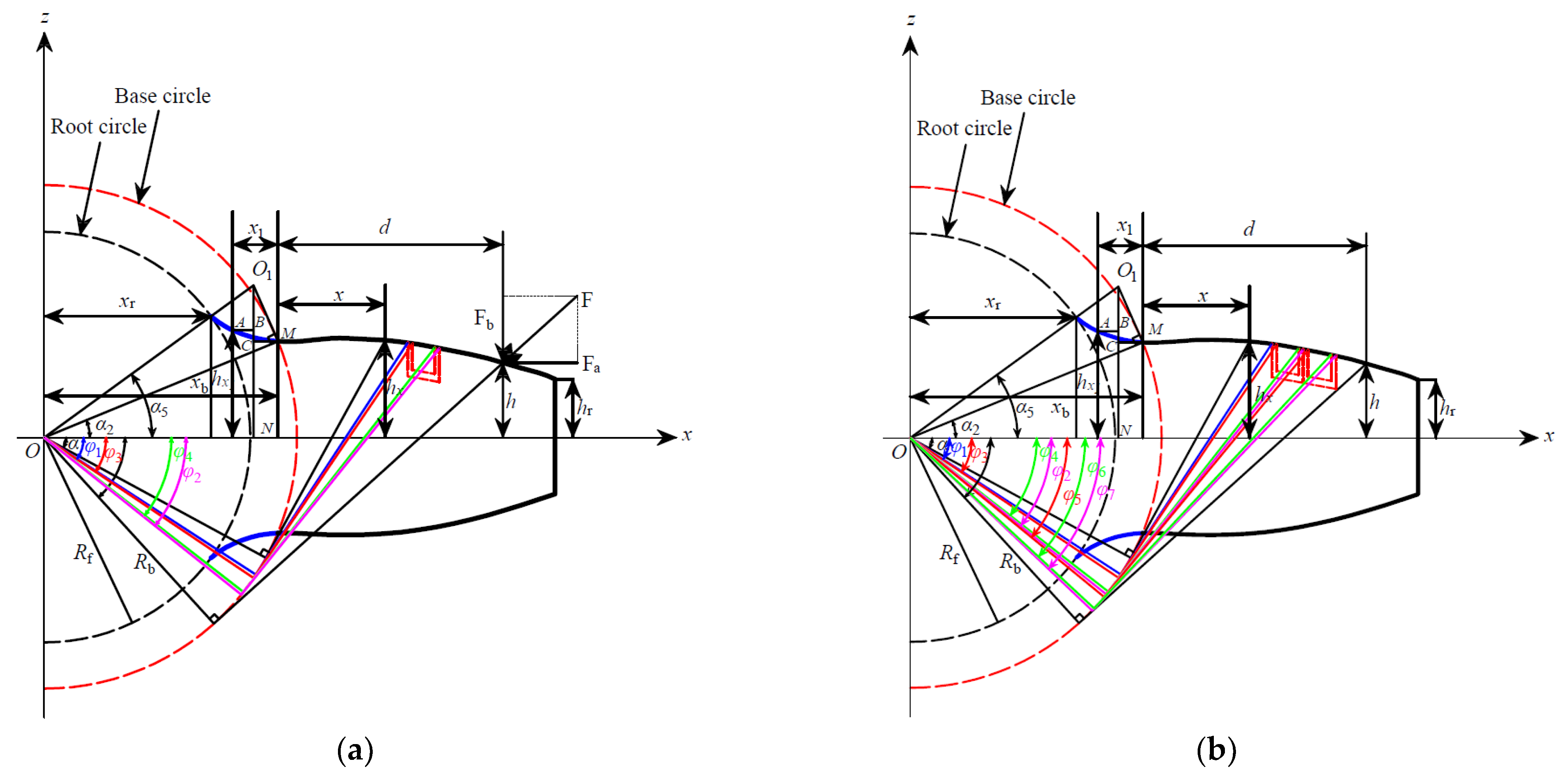
3.1. Cantilever Beam Model for Gear Tooth
3.2. Calculation of TVMS for a Healthy Gear Tooth
- : ,
- : ,
- : ,
3.3. Calculation of TVMS for a Gear Tooth with Pitting
3.4. The Effect of Tooth Pitting on TVMS
4. Dynamic Response of the Spur Gear Reducer in the Presence of Pitting
4.1. Numerical Simulation
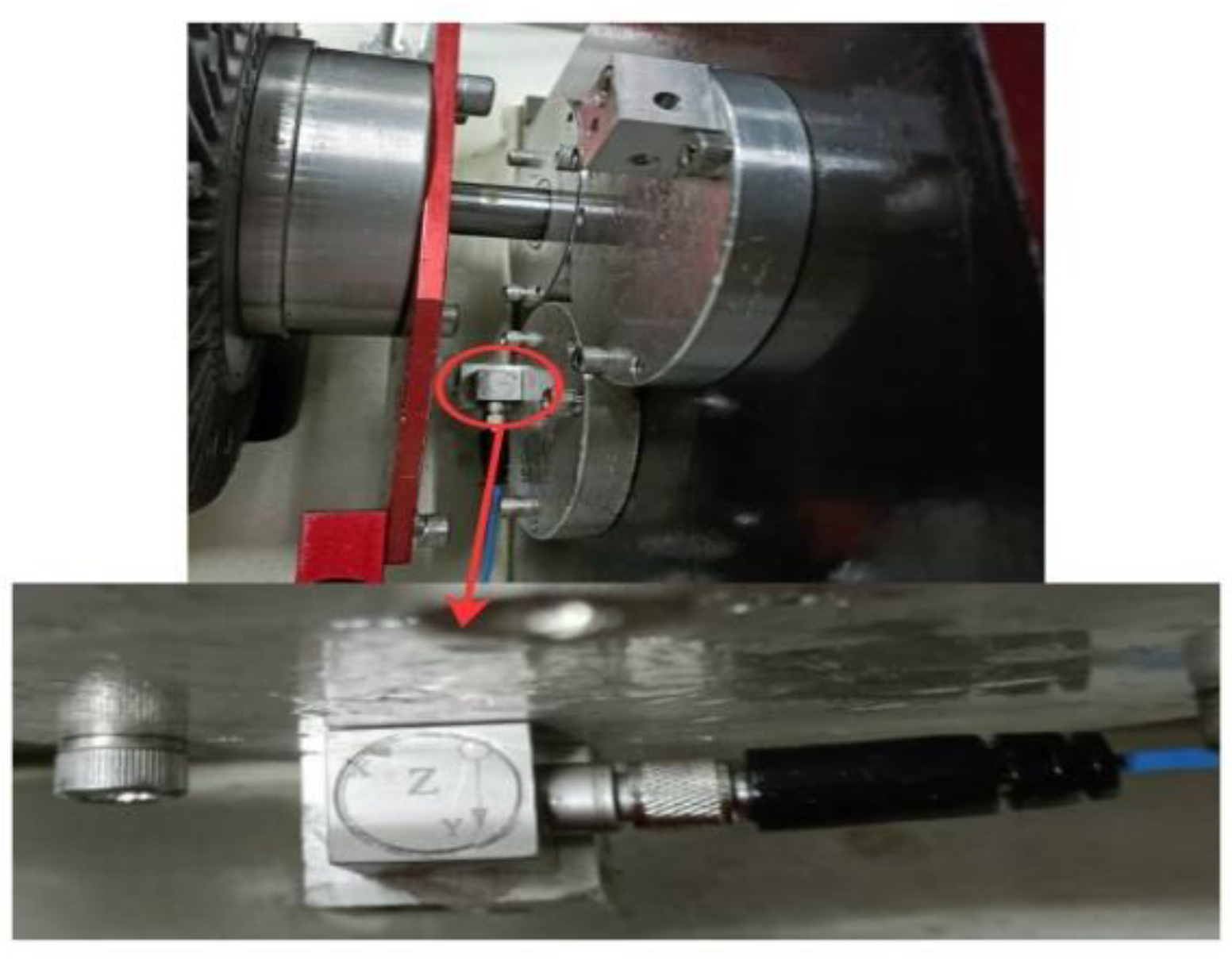
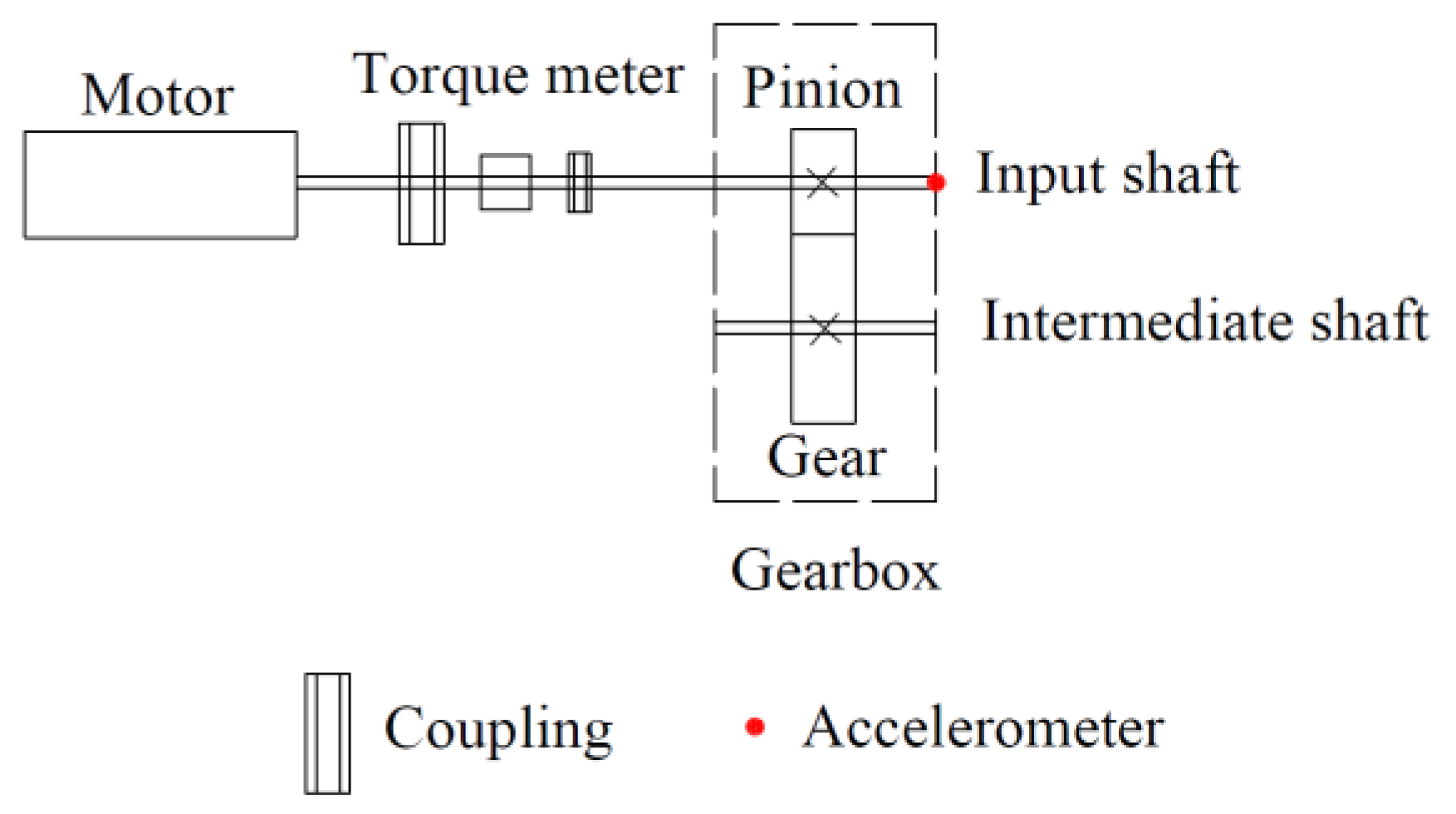
4.2. Experimental Study
5. Conclusions
- (1)
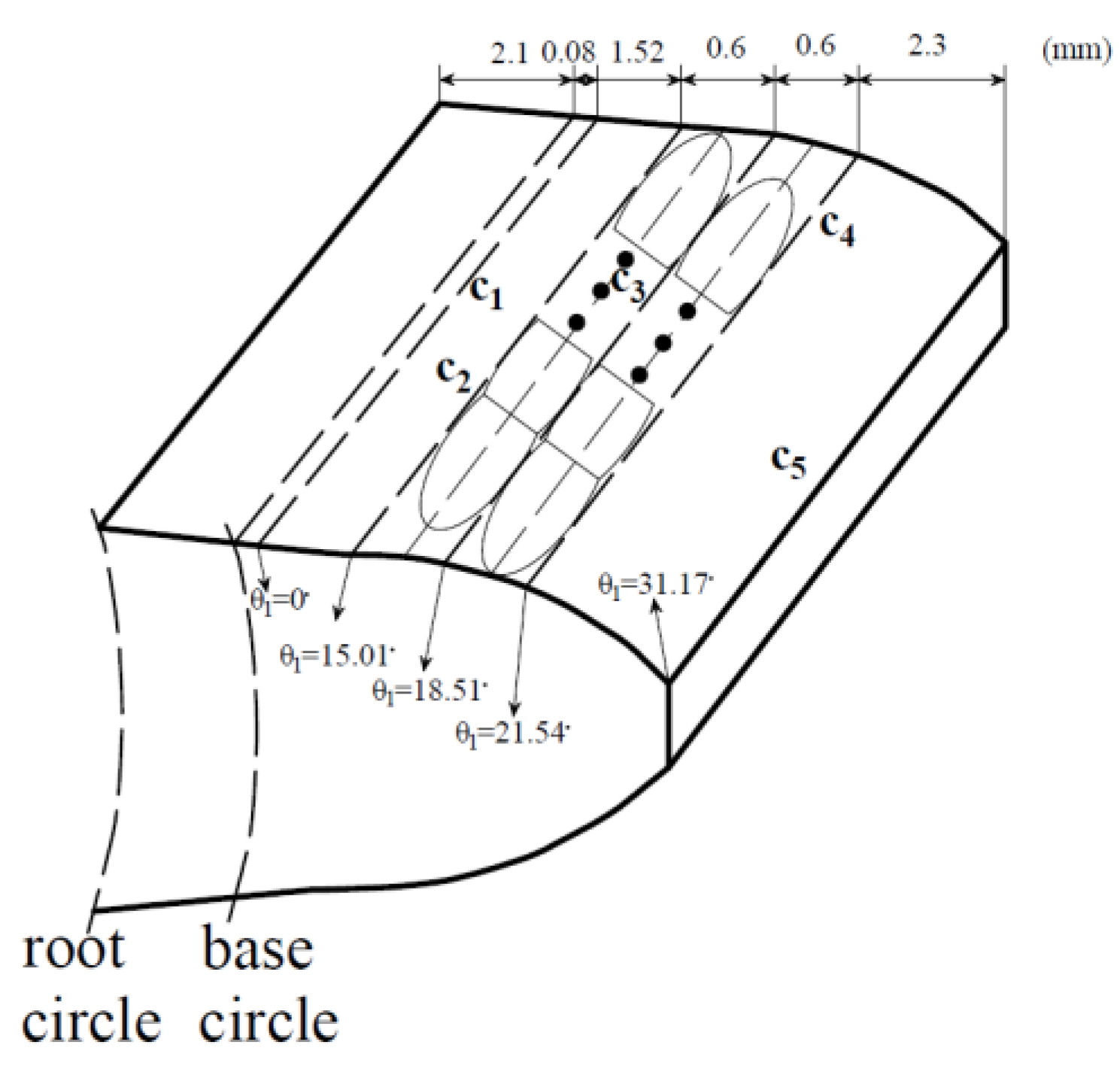
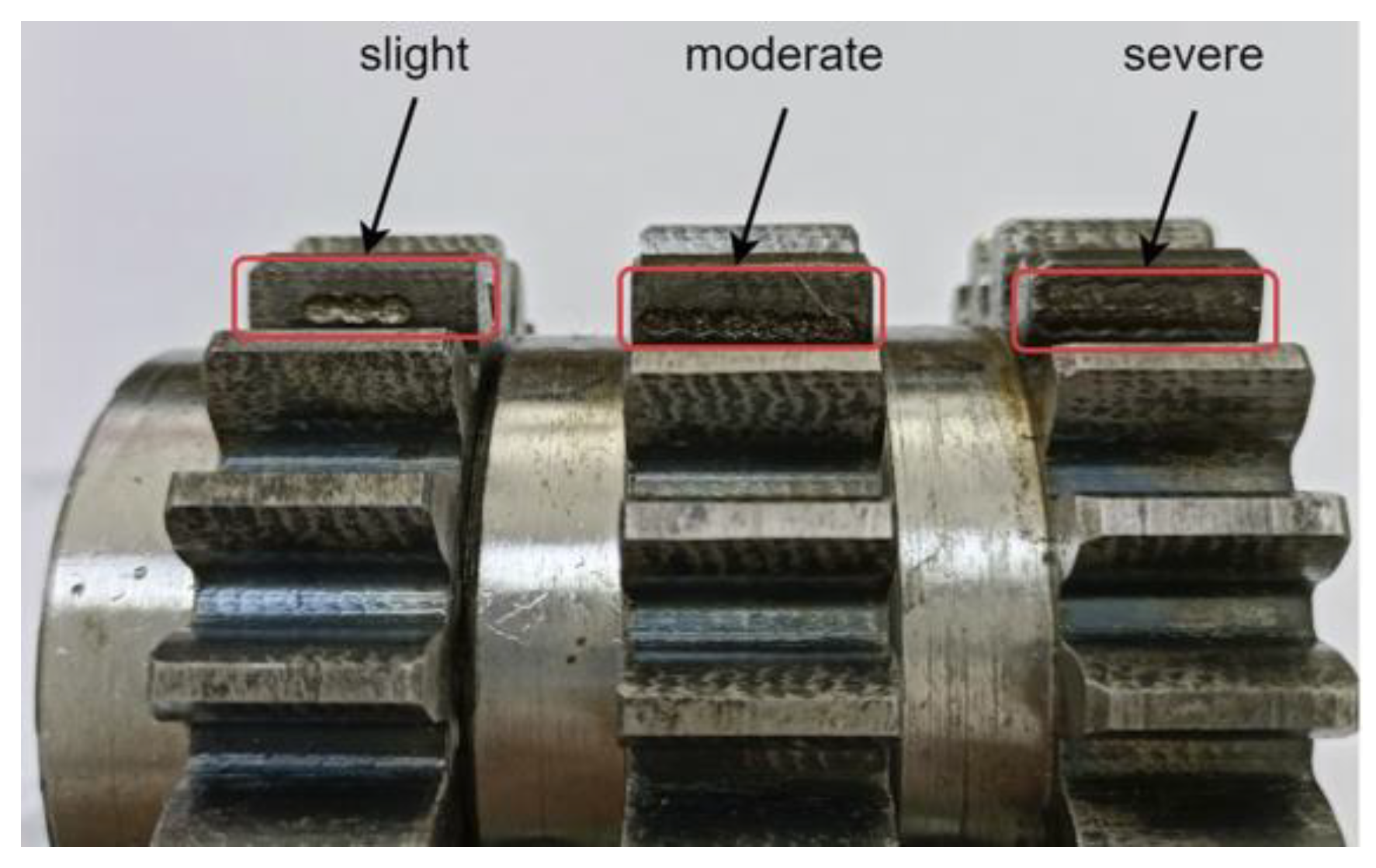
- The overlap between different pitting is considered. The slight pitting model is established as the union of nine elliptic cylinders centered on the tooth pitch line. The moderate pitting is the union of 18 elliptic cylinders. The case for severe pitting, in addition to the union of 18 elliptic cylinders centered on the tooth pitch line, also includes the union of 18 elliptic cylinders centered on the tooth addendum. The new pitting model overcomes the problem of ignoring the overlap between different pits and is more consistent with the actual situation.
- (2)
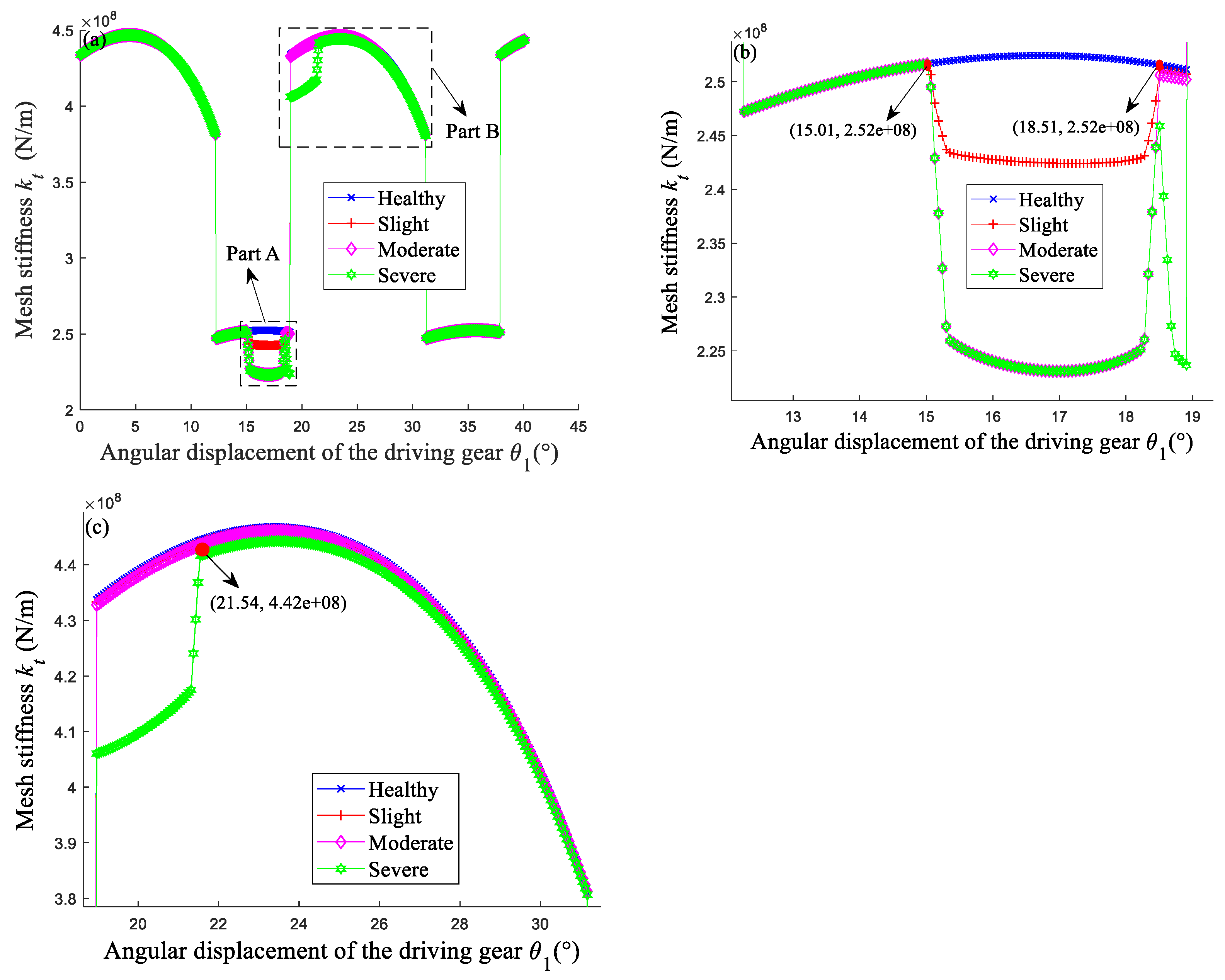
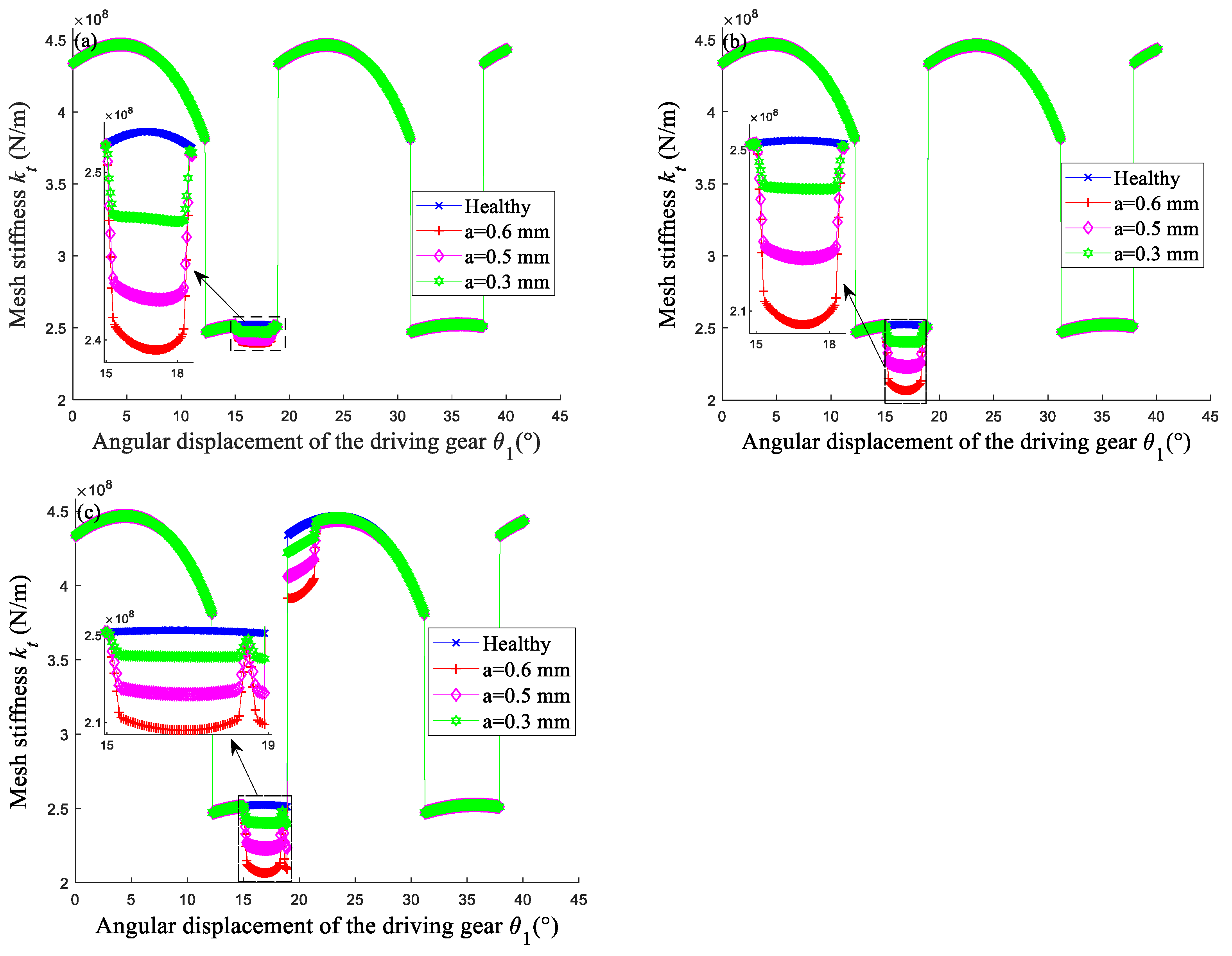
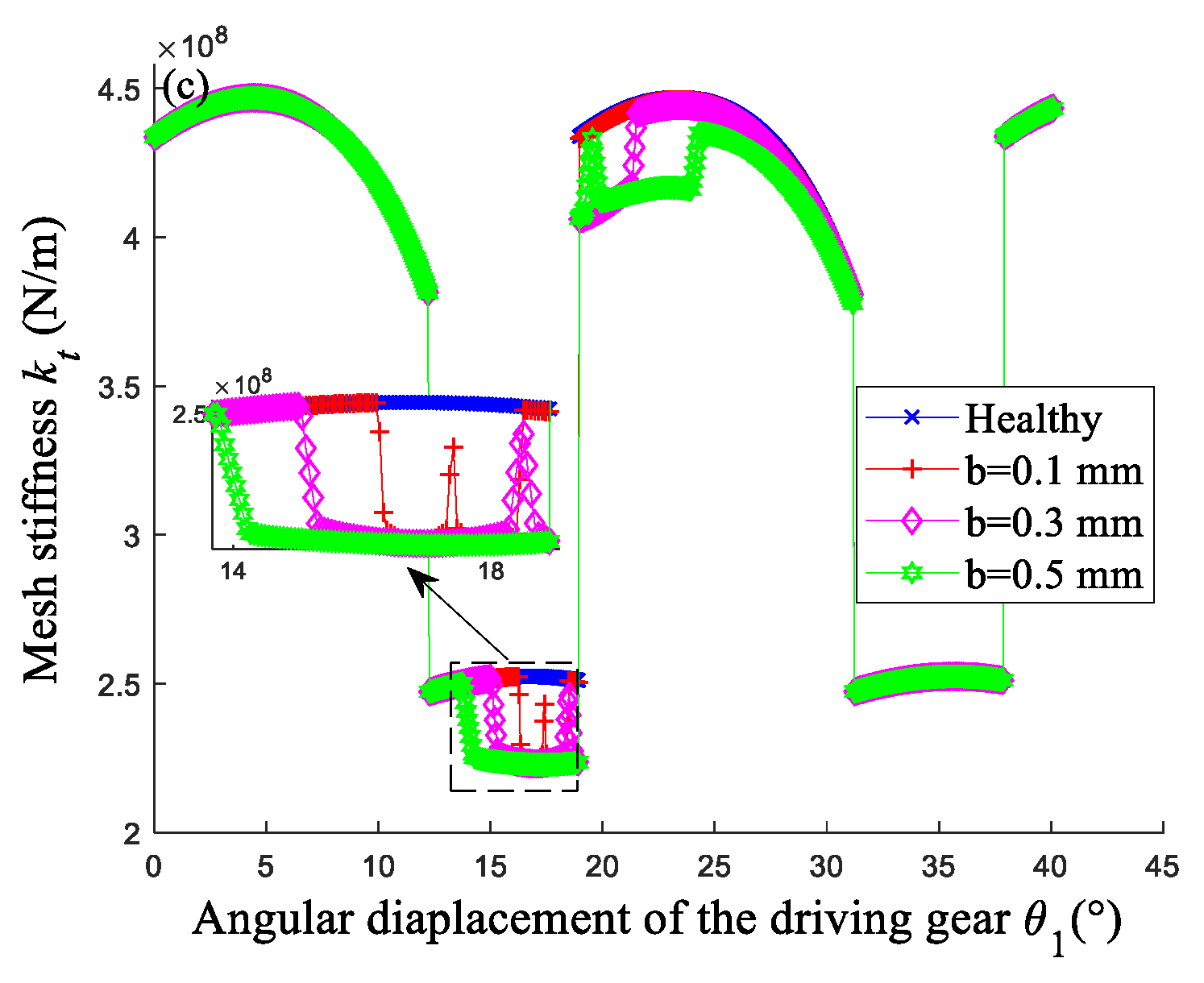
- The presence of tooth pitting reduces the TVMS, and the more serious the pitting is, the more the TVMS decreases. The increase of the length of the major axis reduces the effective contact tooth width and eventually leads to the increase of the reduction of TVMS. The size of pitting perpendicular to the tooth width increases due to the increase of the length of the minor axis, which causes the increase of the region width of the reduction of TVMS.
- (3)
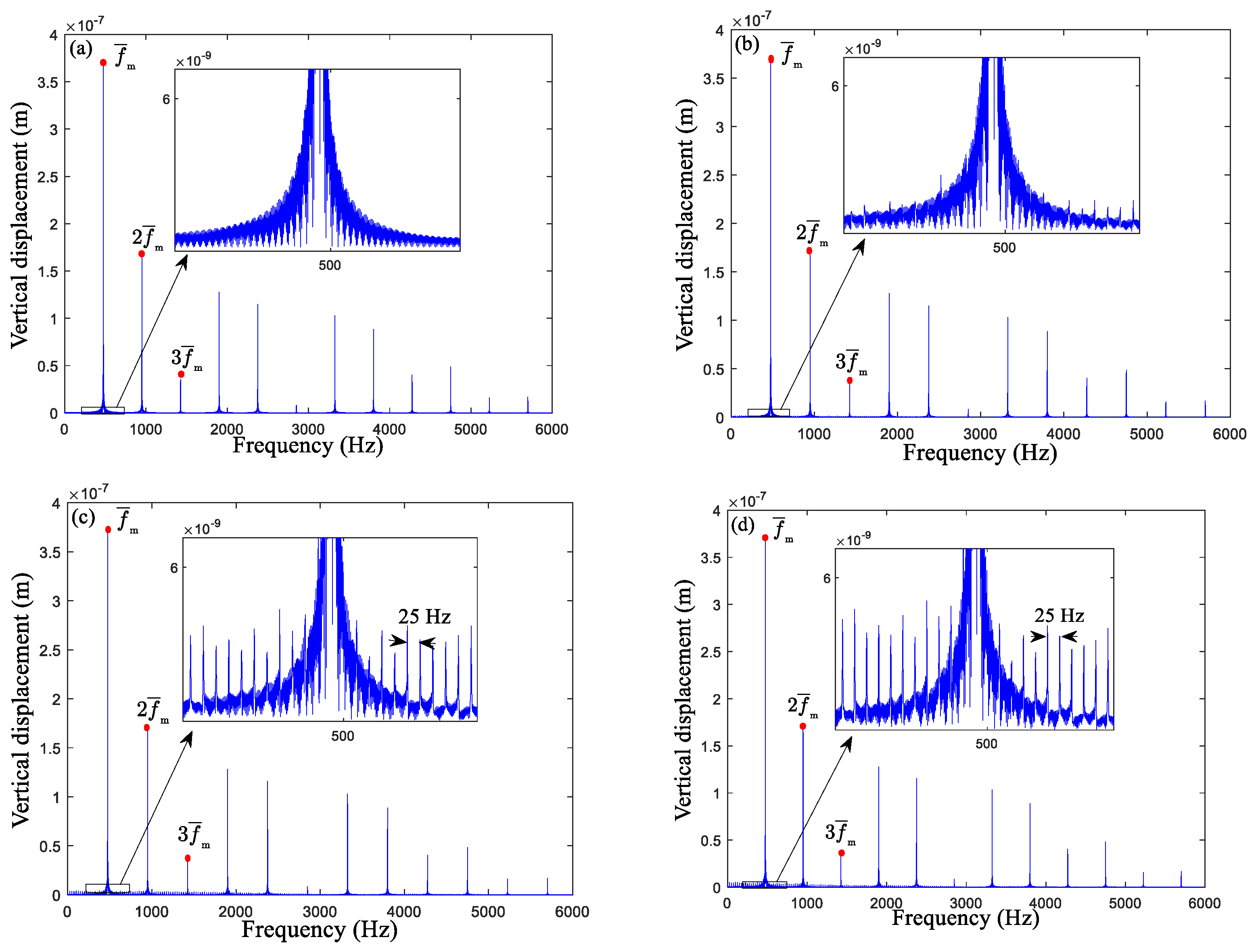
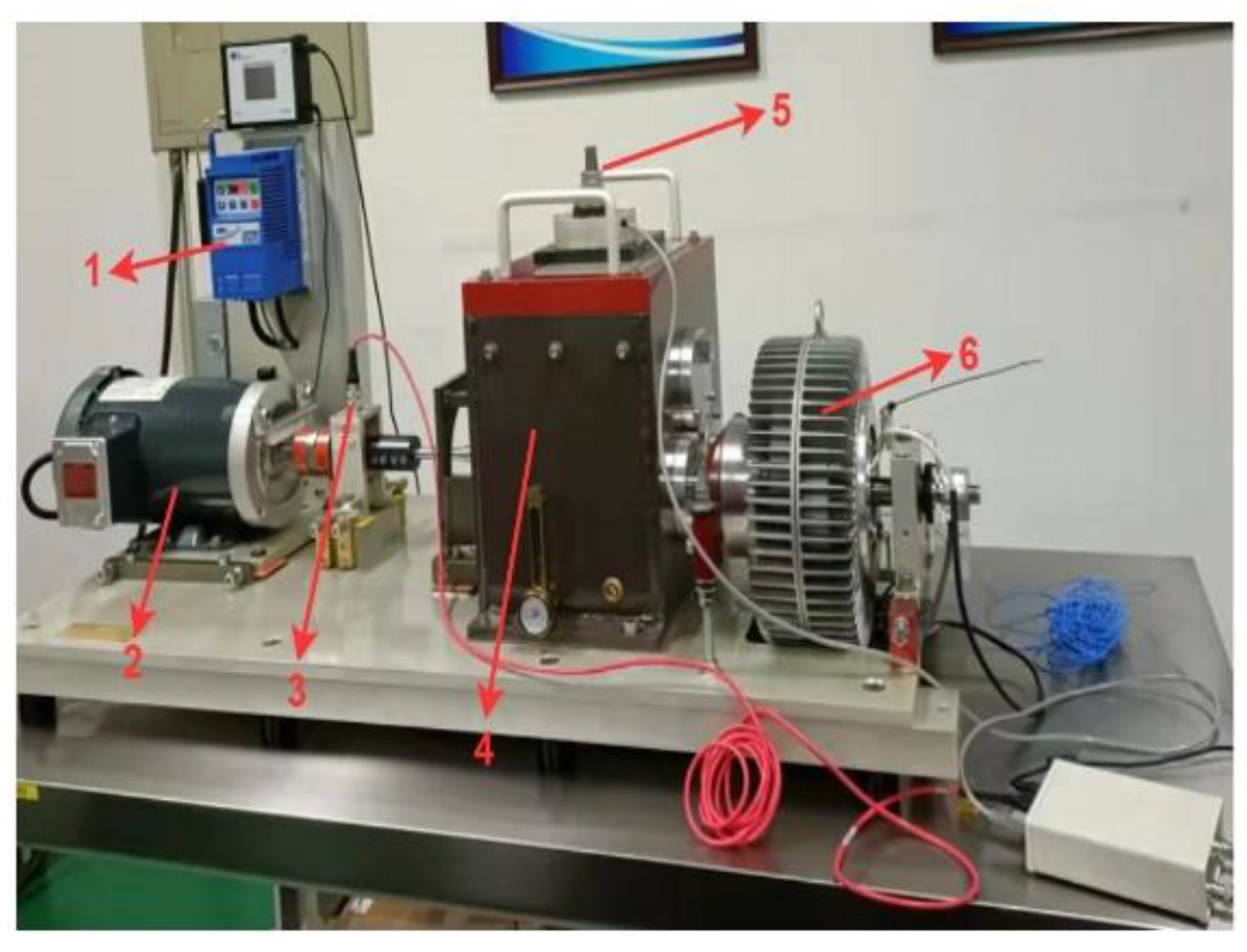
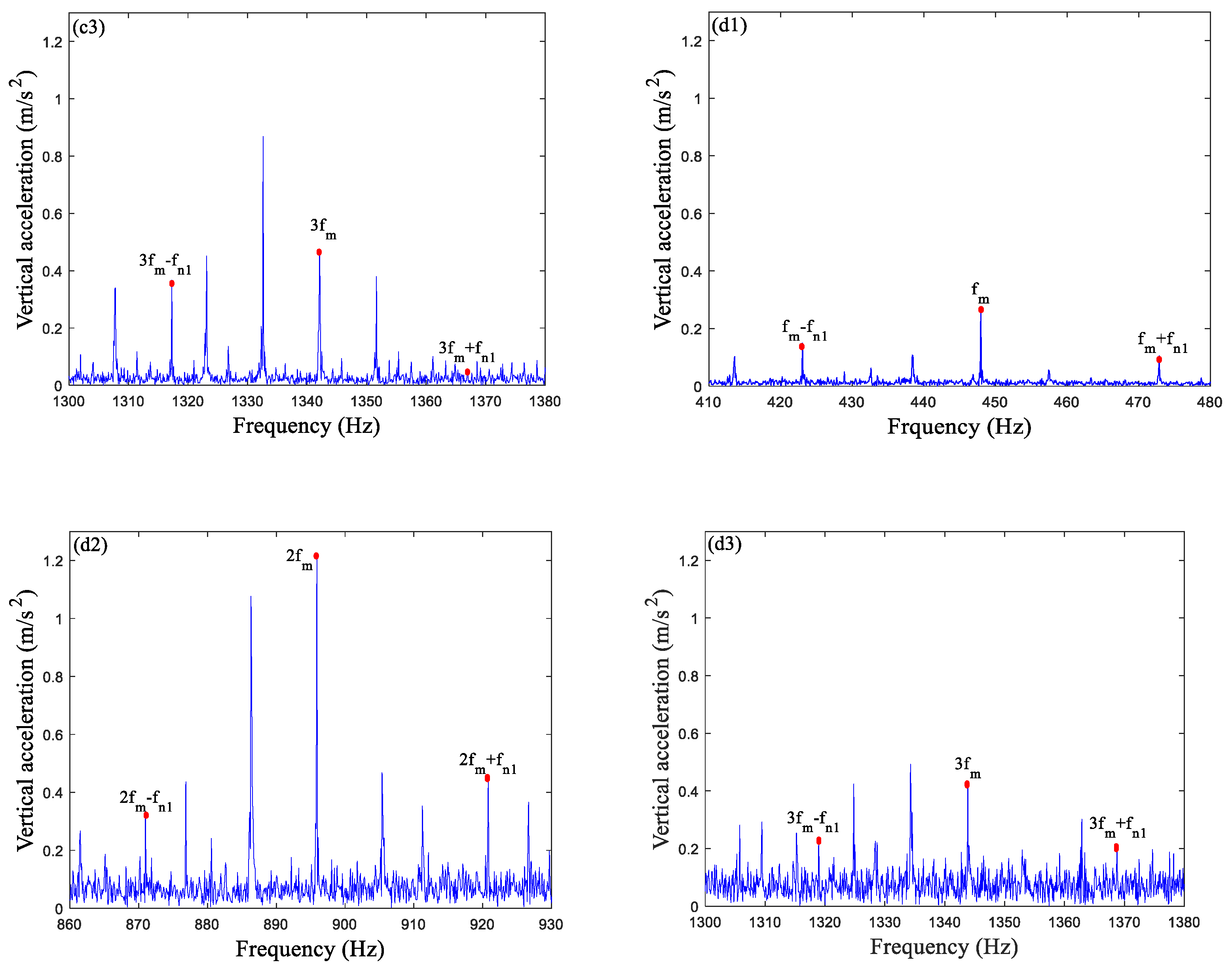
- For a single-stage spur gear reducer with different levels of tooth pitting, the simulation results show that the complex sidebands appear near the gear mesh frequency and its harmonics, and their amplitudes increase with the increase of tooth pitting severity. The experimental signals with tooth pitting also show obvious fault feature, which qualitatively verifies the correctness of the simulation results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Number of teeth of driving gear | |
| Number of teeth of driven gear | |
| Base radius | |
| Root radius | |
| Angular displacement of the driving gear in the double-tooth engagement region | |
| Angular displacement of the driving gear | |
| Shear modulus | |
| Distance from the base circle to the pitch line | |
| Distance between the contact point and the gear center line | |
| Contact force | |
| Center of the transition curve of driving gear | |
| Radius of the transition curve of driving gear | |
| Distance from the contact point to the base circle | |
| Height of the section of which the distance to the base circle is | |
| Height of the section of which the distance to the base circle is | |
| Area moment of inertia of the section of gear without fault, where the distance to the base circle is | |
| Area moment of inertia of the section of gear without fault, where the distance to the base circle is | |
| Area of the section of gear without fault, where the distance to the base circle is | |
| Area of the section of gear without fault, where the distance to the base circle is | |
| Reduction of tooth width for Case | |
| Reduction of area of inertia of the tooth section for Case | |
| Reduction of area moment of inertia of the tooth section for Case | |
| Reduction of tooth width for Case | |
| Reduction of area of inertia of the tooth section for Case | |
| Reduction of area moment of inertia of the tooth section for Case |
Appendix A
References
- Wei, S.; Chu, F.L.; Ding, H.; Chen, L.Q. Dynamic analysis of uncertain spur gear systems. Mech. Syst. Signal Process. 2021, 150, 107280. [Google Scholar] [CrossRef]
- Jiang, J.Z.; Chen, Z.G.; Zhai, W.M.; Zhang, T.; Li, Y.F. Vibration characteristics of railway locomotive induced by gear tooth root crack fault under transient conditions. Eng. Fail. Anal. 2019, 108, 104285. [Google Scholar] [CrossRef]
- Chen, Z.G.; Zhai, W.M.; Wang, K.Y. Dynamic investigation of a locomotive with effect of gear transmissions under tractive conditions. J. Sound Vib. 2017, 408, 220–233. [Google Scholar] [CrossRef]
- Yang, L.; Yang, S.P.; Yang, Y.T. Dynamic behavior of a locomotive nonlinear rotor system. J. Vib. Shock 2018, 37, 33–42. [Google Scholar] [CrossRef]
- Liu, Y.H.; Shi, Z.Q.; Shen, G.J.; Zhen, D.; Wang, F.Y. Evaluation model of mesh stiffness for spur gear with tooth tip chipping fault. Mech. Mach. Theory 2021, 158, 104238. [Google Scholar] [CrossRef]
- Chen, Z.G.; Shao, Y.M. Mesh stiffness calculation of a spur gear pair with tooth profile modification and tooth root crack. Mech. Mach. Theory 2013, 62, 63–74. [Google Scholar] [CrossRef]
- Yang, S.P.; Liu, Y.Q. Development of railway vehicle dynamics and control. J. Dyn. Control. 2020, 18, 1–4. [Google Scholar] [CrossRef]
- Qin, Y.; Mao, Y.F.; Tang, B.P.; Wang, Y.; Chen, H.Z. M-band flexible wavelet transform and its application to the fault diagnosis of planetary gear transmission systems. Mech. Syst. Signal Process. 2019, 134, 106298.1–106298.26. [Google Scholar] [CrossRef]
- Feng, K.; Smith, W.A.; Randall, R.B.; Wu, H.K.; Peng, Z.X. Vibration-based monitoring and prediction of surface profile change and pitting density in a spur gear wear process. Mech. Syst. Signal Process. 2022, 165, 108319. [Google Scholar] [CrossRef]
- Jia, S.X.; Howard, I. Comparison of localised spalling and crack damage from dynamic modelling of spur gear vibrations. Mech. Syst. Signal Process. 2006, 20, 332–349. [Google Scholar] [CrossRef]
- Cooley, C.G.; Parker, R.G.; Vijayakar, S.M. A frequency domain finite element approach for three-dimensional gear dynamics. J. Vib. Acoust. 2011, 133, 041004. [Google Scholar] [CrossRef]
- Rincon, A.F.; Viadero, F.; Iglesias, M.; de-Juan, A.; Garcia, P.; Sancibrian, R. Effect of cracks and pitting defects on gear meshing. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2012, 226, 2805–2815. [Google Scholar] [CrossRef]
- Yang, D.C.H.; Lin, J.Y. Hertzian damping, tooth friction and bending elasticity in gear impact dynamics. J. Mech. Transm. Autom. Des. 1987, 109, 189–196. [Google Scholar] [CrossRef]
- Tian, X.H. Dynamic Simulation for System Response of Gearbox Including Localized Gear Faults. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2004. [Google Scholar]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of gear body to tooth deflections-a new bidimensional analytical formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Sánchez, M.B.; Pleguezuelos, M.; Pedrero, J.I. Approximate equations for the meshing stiffness and the load sharing ratio of spur gears including hertzian effects. Mech. Mach. Theory 2017, 109, 231–249. [Google Scholar] [CrossRef]
- Xiong, Y.S.; Huang, K.; Xu, F.W.; Yi, Y.; Sang, M.; Zhai, H. Research on the influence of backlash on mesh stiffness and the nonlinear dynamics of spur gears. Appl. Sci. 2019, 9, 1029. [Google Scholar] [CrossRef] [Green Version]
- Del Rincon, A.F.; Viadero, F.; Iglesias, M.; Garcia, P.; De-Juan, A.; Sancibrian, R. A model for the study of meshing stiffness in spur gear transmissions. Mech. Mach. Theory 2013, 61, 30–58. [Google Scholar] [CrossRef]
- Ma, H.; Pang, X.; Zeng, J.; Wang, Q.B.; Wen, B.C. Effects of gear crack propagation paths on vibration responses of the perforated gear system. Mech. Syst. Signal Process. 2015, 62–63, 113–128. [Google Scholar] [CrossRef]
- Wu, S.Y.; Zuo, M.J.; Parey, A. Simulation of spur gear dynamics and estimation of fault growth. J. Sound Vib. 2008, 317, 608–624. [Google Scholar] [CrossRef]
- Liang, X.H.; Zuo, M.J.; Pandey, M. Analytically evaluating the influence of crack on the mesh stiffness of a planetary gear set. Mech. Mach. Theory 2014, 76, 20–38. [Google Scholar] [CrossRef]
- Jiang, F.; Ding, K.; He, G.L.; Sun, Y.L.; Wang, L.H. Vibration fault features of planetary gear train with cracks under time-varying flexible transfer functions. Mech. Mach. Theory 2021, 158, 104237. [Google Scholar] [CrossRef]
- Meng, Z. Vibration response and fault characteristics analysis of gear based on time-varying mesh stiffness. Mech. Mach. Theory 2020, 148, 103786. [Google Scholar] [CrossRef]
- Pandya, Y.; Parey, A. Experimental investigation of spur gear tooth mesh stiffness in the presence of crack using photoelasticity technique. Eng. Fail. Anal. 2013, 34, 488–500. [Google Scholar] [CrossRef]
- Chen, Z.G.; Shao, Y.M. Dynamic simulation of spur gear with tooth root crack propagating along tooth width and crack depth. Eng. Fail. Anal. 2011, 18, 2149–2164. [Google Scholar] [CrossRef]
- Chaari, F.; Baccar, W.; Abbes, M.S.; Haddar, M. Effect of spalling or tooth breakage on gearmesh stiffness and dynamic response of a one-stage spur gear transmission. Eur. J. Mech.-A/Solids 2008, 27, 691–705. [Google Scholar] [CrossRef]
- Abouel-seoud, S.A.; Dyab, E.S.; Elmorsy, M.S. Influence of tooth pitting and cracking on gear meshing stiffness and dynamic response of wind turbine gearbox. Int. J. Sci. Adv. Technol. 2012, 2, 151–165. [Google Scholar]
- Ma, H.; Li, Z.W.; Feng, M.J.; Feng, R.J.; Wen, B.C. Time-varying mesh stiffness calculation of spur gears with spalling defect. Eng. Fail. Anal. 2016, 66, 166–176. [Google Scholar] [CrossRef]
- Jiang, H.J.; Shao, Y.M.; Mechefske, C.K. Dynamic characteristics of helical gears under sliding friction with spalling defect. Eng. Fail. Anal. 2014, 39, 92–107. [Google Scholar] [CrossRef]
- Liang, X.H.; Liu, Z.L.; Pan, J.; Zuo, M.J. Spur gear tooth pitting propagation assessment using model-based analysis. Chin. J. Mech. Eng. 2017, 30, 1369–1382. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.H.; Zhang, H.S.; Liu, L.B.; Zuo, M.J. The influence of tooth pitting on the mesh stiffness of a pair of external spur gears. Mech. Mach. Theory 2016, 106, 1–15. [Google Scholar] [CrossRef]
- Lei, Y.G.; Liu, Z.Y.; Wang, D.L.; Yang, X.; Liu, H.; Lin, J. A probability distribution model of tooth pits for evaluating time-varying mesh stiffness of pitting gears. Mech. Syst. Signal Process. 2018, 106, 355–366. [Google Scholar] [CrossRef]
- Chen, T.Y.; Wang, Y.X.; Chen, Z.G. A novel distribution model of multiple teeth pits for evaluating time-varying mesh stiffness of external spur gears. Mech. Syst. Signal Process. 2019, 129, 479–501. [Google Scholar] [CrossRef]
- Luo, Y.; Baddour, N.; Liang, M. Dynamical modeling and experimental validation for tooth pitting and spalling in spur gears. Mech. Syst. Signal Process. 2018, 119, 155–181. [Google Scholar] [CrossRef]
- Luo, Y.; Baddour, N.; Han, G.S.; Jiang, F.; Liang, M. Evaluation of the time-varying mesh stiffness for gears with tooth spalls with curved-bottom features. Eng. Fail. Anal. 2018, 92, 430–442. [Google Scholar] [CrossRef]
- Luo, Y.; Baddour, N.; Liang, M. A shape-independent approach to modelling gear tooth spalls for time varying mesh stiffness evaluation of a spur gear pair. Mech. Syst. Signal Process. 2019, 120, 836–852. [Google Scholar] [CrossRef]
- Meng, Z.; Wang, F.L.; Shi, G.X. A novel evolution model of pitting failure and effect on time-varying meshing stiffness of spur gears. Eng. Fail. Anal. 2021, 120, 105068. [Google Scholar] [CrossRef]
- Anderson, A.E. Friction, lubrication and wear technology. In ASM Handbook; ASM international: Almere, The Netherlands, 1992. [Google Scholar]
- Tan, C.K.; Irving, P.; Mba, D. A comparative experimental study on the diagnostic and prognostic capabilities of acoustics emission, vibration and spectrometric oil analysis for spur gears. Mech. Syst. Signal Process. 2007, 21, 208–233. [Google Scholar] [CrossRef] [Green Version]
- Feng, K.; Smith, W.A.; Borghesani, P.; Randall, R.B.; Peng, Z. Use of cyclostationary properties of vibration signals to identify gear wear mechanisms and track wear evolution. Mech. Syst. Signal Process. 2020, 150, 107258. [Google Scholar] [CrossRef]
- Wang, J.J. Calculation Method of Time-Varying Mesh Stiffness with Faults and Dynamic Modelling and Simulation of Gear System. Master’s Thesis, Shijiazhaung Tiedao University, Shijiazhuang, China, 2015. [Google Scholar]
- Hou, J.Y.; Yang, S.P.; Li, Q.; Liu, Y.Q.; Wang, J.J. Mesh stiffness calculation and vibration analysis of spur gear pair with tooth crack considering the misalignment between base circle and root circle. Int. J. Mech. Syst. Dyn. 2021, 1, 143–156. [Google Scholar] [CrossRef]
- Li, Y.Z.; Ding, K.; He, G.L.; Lin, H.B. Vibration mechanisms of spur gear pair in healthy and fault states. Mech. Syst. Signal Process. 2016, 81, 183–201. [Google Scholar] [CrossRef]
- Ma, R.; Chen, Y.S. Research on the dynamic mechanism of the gear system with local crack and spalling failure. Eng. Fail. Anal. 2012, 26, 12–20. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slight | Moderate | Severe | |
|---|---|---|---|
| Case 1 | Case 3 | Case 5 | |
| Case 2 | Case 4 | Case 6 | |
| - | - | Case 7 | |
| - | - | Case 8 |
| Parameters | Pinion | Gear |
|---|---|---|
| Number of teeth | 19 | 48 |
| Young’s modulus | 206.8 | 206.8 |
| Poisson’s ratio | 0.3 | 0.3 |
| Module | 3.2 | 3.2 |
| Addendum coefficient | 1 | 1 |
| Tip clearance coefficient | 0.25 | 0.25 |
| Tooth width | 16 | 16 |
| Pressure angle | 20 | 20 |
| Frequency | Normal | Slight | Moderate | Severe |
|---|---|---|---|---|
| Frequency | Normal | Slight | Moderate | Severe |
|---|---|---|---|---|
| 1.226 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, J.; Yang, S.; Li, Q.; Liu, Y. Effect of a Novel Tooth Pitting Model on Mesh Stiffness and Vibration Response of Spur Gears. Mathematics 2022, 10, 471. https://doi.org/10.3390/math10030471
Hou J, Yang S, Li Q, Liu Y. Effect of a Novel Tooth Pitting Model on Mesh Stiffness and Vibration Response of Spur Gears. Mathematics. 2022; 10(3):471. https://doi.org/10.3390/math10030471
Chicago/Turabian StyleHou, Jingyu, Shaopu Yang, Qiang Li, and Yongqiang Liu. 2022. "Effect of a Novel Tooth Pitting Model on Mesh Stiffness and Vibration Response of Spur Gears" Mathematics 10, no. 3: 471. https://doi.org/10.3390/math10030471
APA StyleHou, J., Yang, S., Li, Q., & Liu, Y. (2022). Effect of a Novel Tooth Pitting Model on Mesh Stiffness and Vibration Response of Spur Gears. Mathematics, 10(3), 471. https://doi.org/10.3390/math10030471