
Development of Parallel Algorithms for Intelligent Transportation Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Motivation of the Research
1.2. Research Objective
1.3. Research Methodology
1.4. Scientific Contribution
- -
- Macroscopic two-dimensional QGD model for traffic flow simulation including lateral velocity of lane change; two different forms for lateral velocity with recommendations for their use;
- -
- A special form of internal boundary conditions for their exchange at the boundaries of subdomains;
- -
- A multilane CA model with speed adaptation mechanisms featuring various driving strategies;
- -
- Parallel implementation of traffic flow models based on the domain decomposition technique and adapted to HPC systems with distributed memory.
2. State of the Art in the Research Field
3. Macroscopic Quasi-Gas-Dynamic Traffic Model
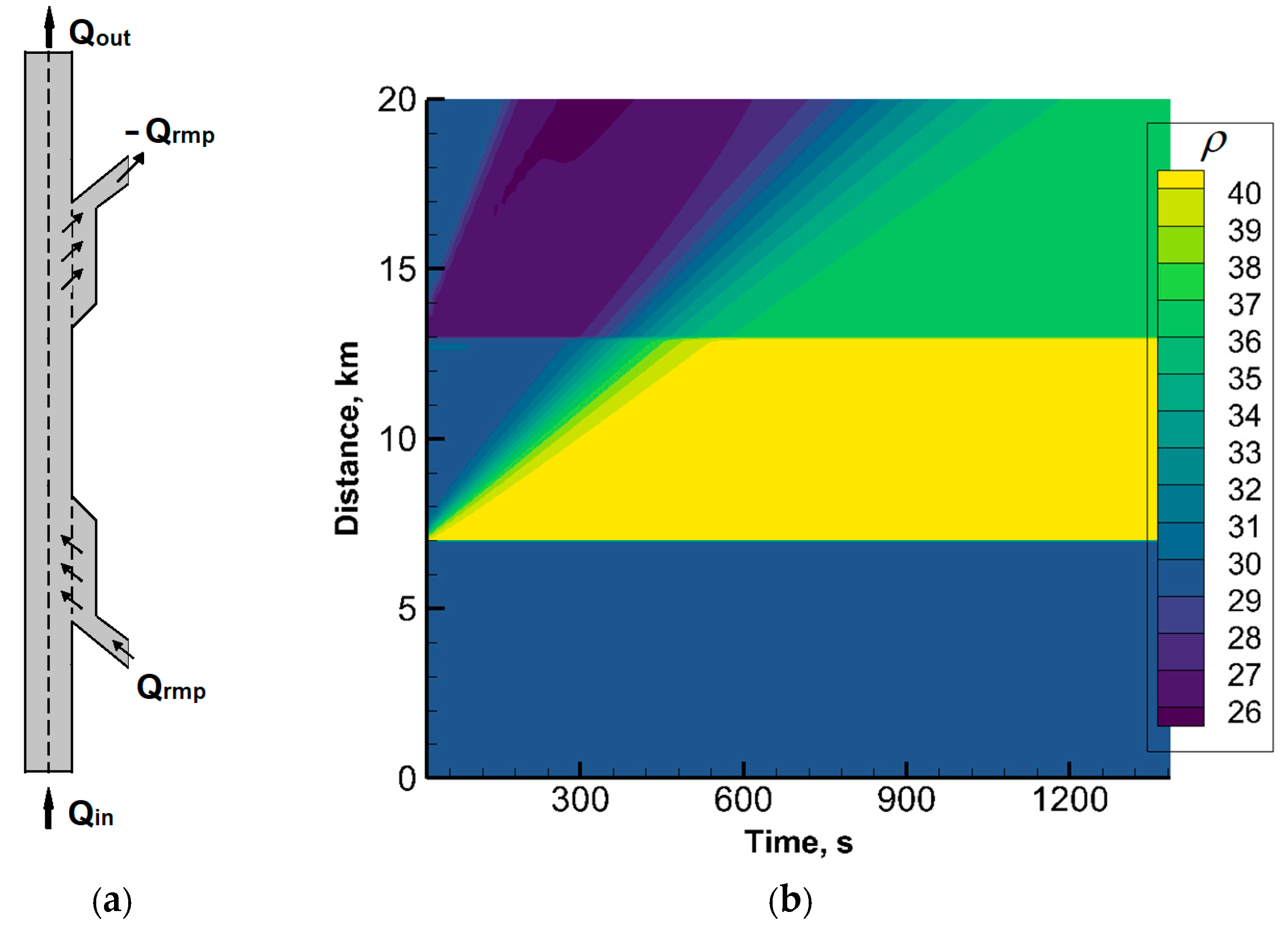
3.1. Governing Equations
- -
- Acceleration/deceleration force ,
- -
- Acceleration ,
- -
- Equilibrium speed ,
- -
- Relaxation time —phenomenological constants.
3.2. Parallel Implementation
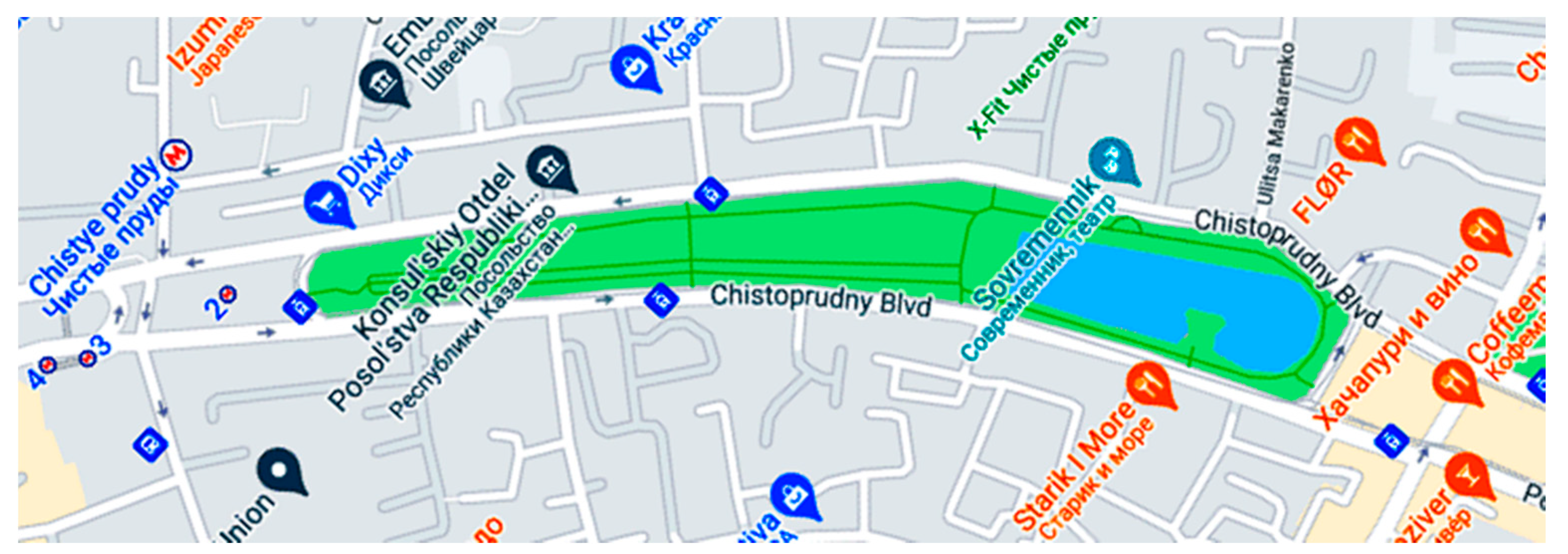
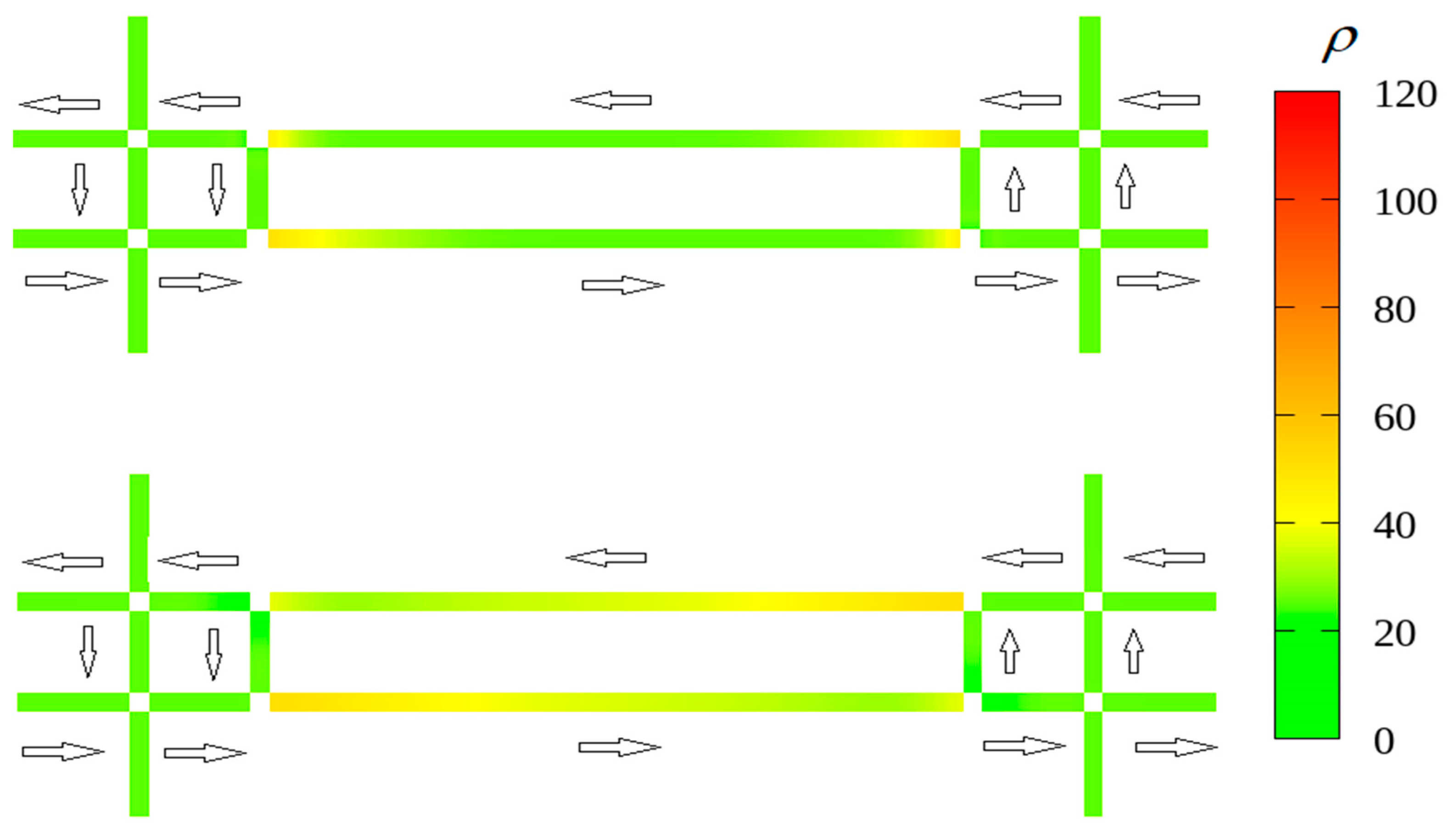
3.3. Numerical Results
4. Cellular Automata Approach: From Nagel–Schreckenberg-Based to KKSW-Based Model
4.1. Methods of Modeling Traffic within Cellular Automata (CA) Approach and Their Problems
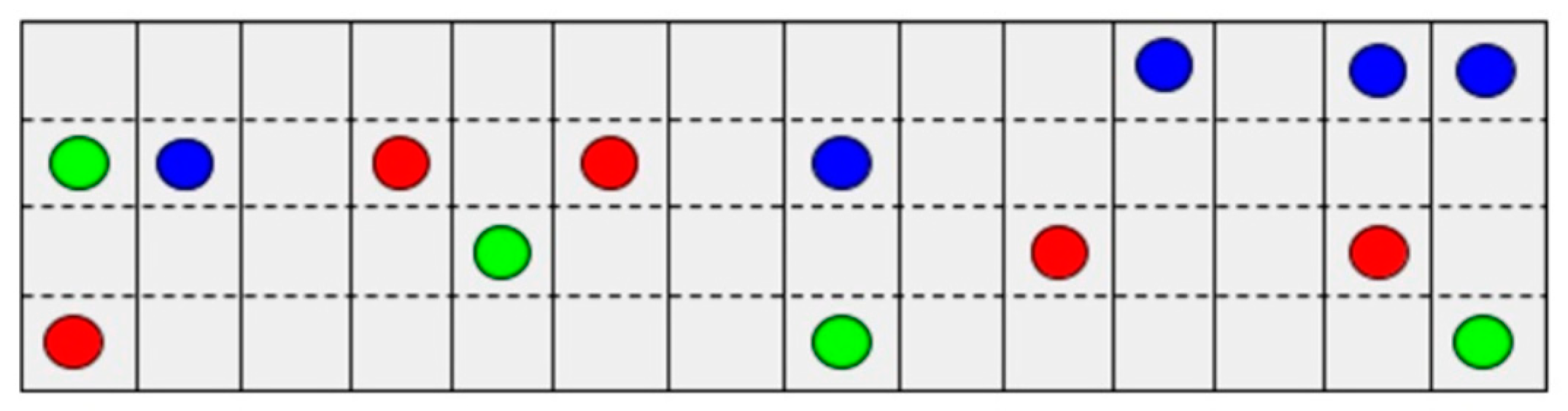
4.2. The Basics of the Original CA-Based Model (CAM-2D)
- Vehicles change lanes if it is necessary (to reach the desired destination or to drive around an obstacle), it is advantageous for the drivers (leads to speed increase and/or density decrease) and it is possible (i.e., if the lane change is allowed and the target cell is empty);
- Vehicles move along the road according to the classic rules of one-lane traffic.
- Acceleration: Vn = max (Vn + 1, Vmax);
- Braking in order to avoid collisions: Vn = min (Vn, dn − 1);
- Stochastic braking: Vn = max (Vn − 1, 0) with probability p;
- Moving along the road: Xn = Xn + Vn.
4.3. Adding Speed Adaptation Steps to CAM-2D Model
- Lane changing if necessary and possible;
- If the car is within the synchronization gap Gn (distance between the car under consideration and its leading car dn ≤ Gn) then the vehicle speed Vn = Vn + sgn (Vln − Vn), where Vln is the leader’s speed;
- 3.
- If the distance between the car and the leader dn > Gn,, the car accelerates if its speed is still lower than maximal: Vn = max (Vn + 1, Vmax);
- 4.
- Braking in order to avoid collisions: Vn = min (Vn, dn − 1);
- 5.
- Stochastic braking Vn = max (Vn − 1, 0) with probability p;
- 6.
- Moving along the road: Xn = Xn +Vn.
4.4. Additional Speed Adaptation for the Case of Traffic Jams in Neighbouring Lanes
- If jcr > J or jcl > J, jam = true. Here, J is a parameter that should be chosen according to the task requirements during the calibration process, jam is a Boolean variable that indicates traffic jam.
- If the car is within the synchronization gap Gn (distance between the car under consideration and its leading car dn ≤ Gn);if Vln − Vn > 0 and jam = false, Vn = max (Vn + 1, Vmax);if Vln − Vn > 0 and jam = true, Vn = Vn;if Vln − Vn = 0, Vn = Vn;if Vln − Vn < 0, Vn = max (Vn − 1, 0).
- 3.
- If the distance between the car and the leader dn > Gn,if jam = false, Vn = max (Vn + 1, Vmax);if jam = true, Vn = Vn.
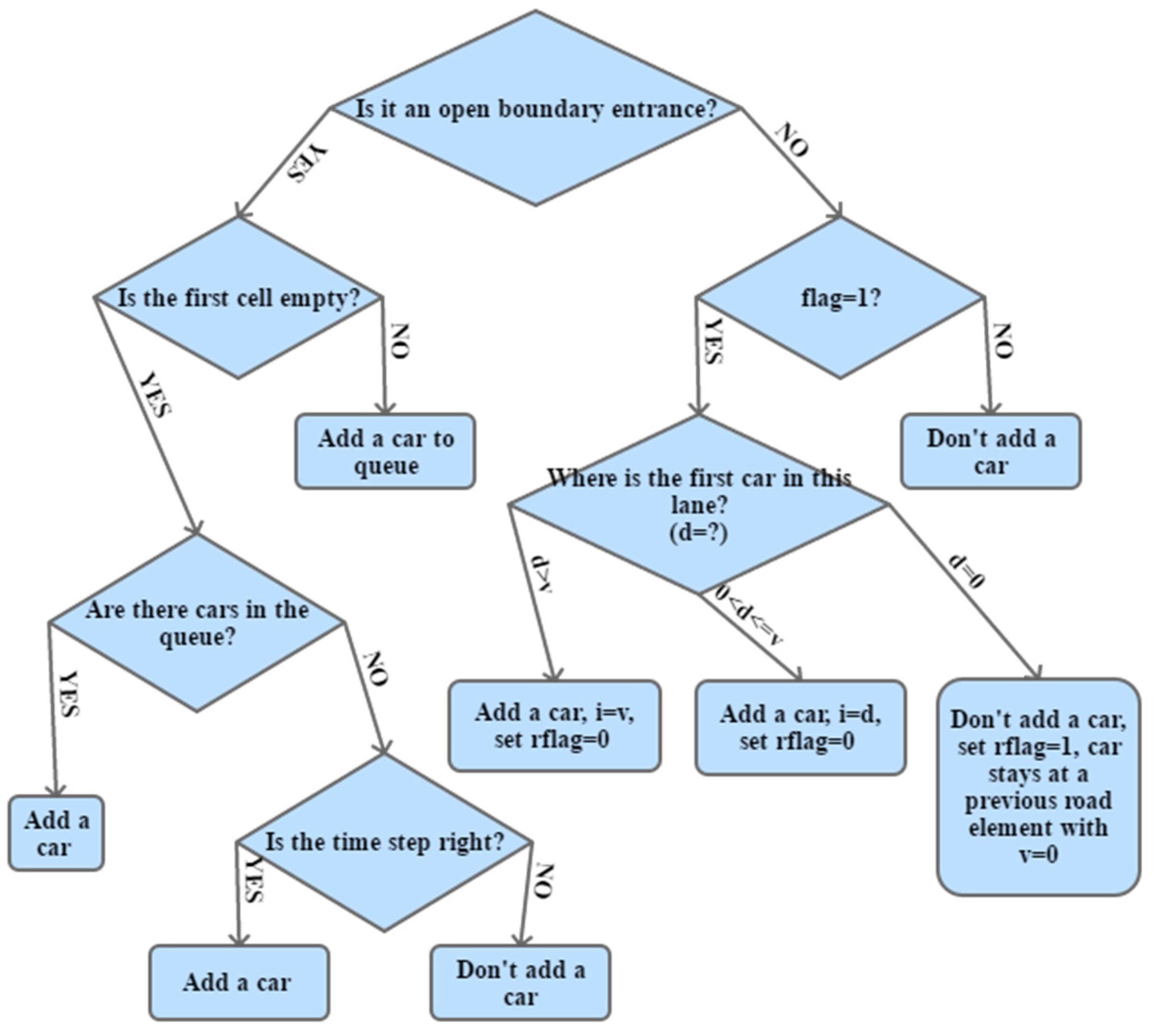
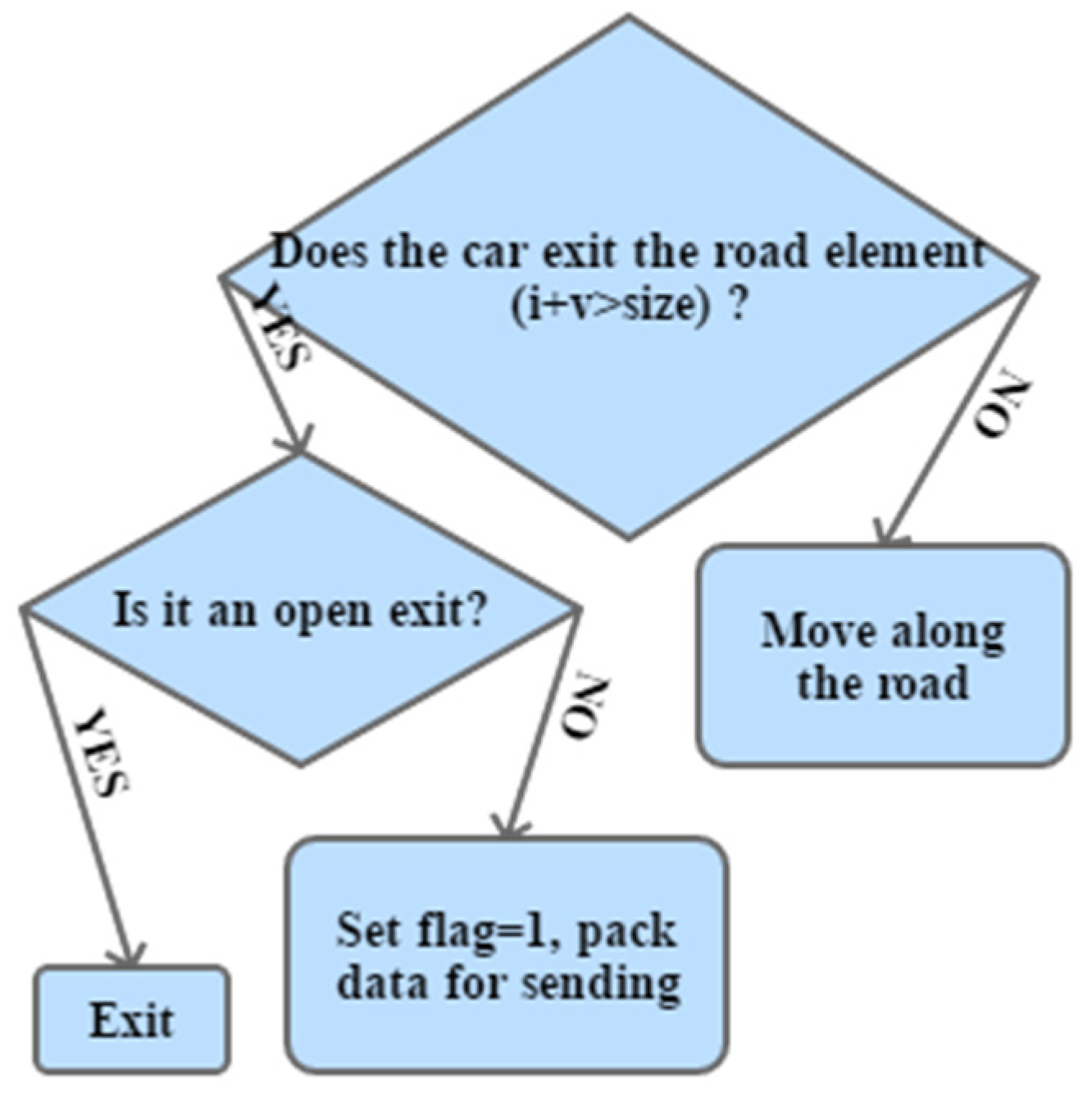
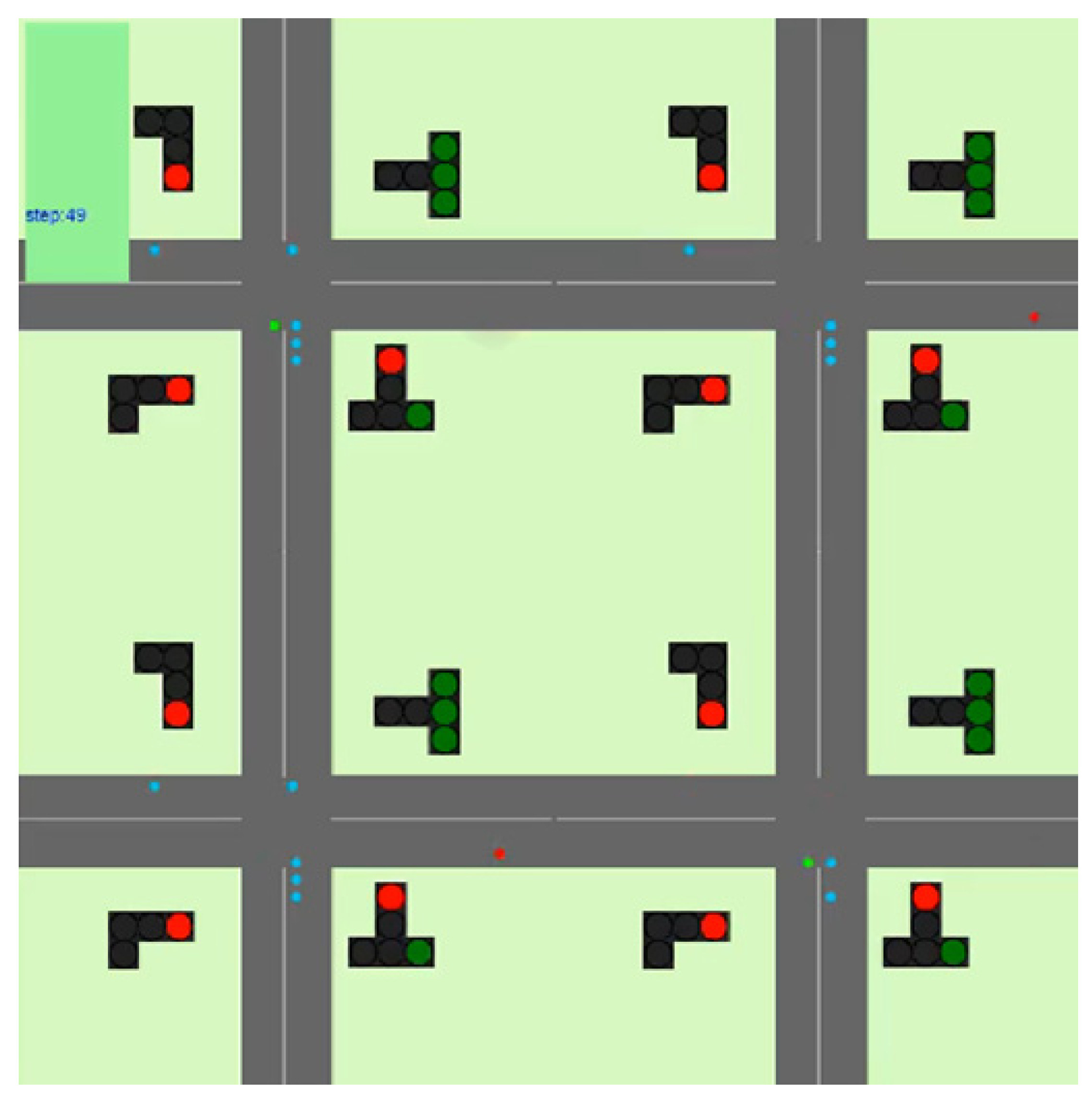
4.5. Parallel Implementation
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dimitrakopoulos, G.; Uden, L.; Varlamis, I. The Future of Intelligent Transport Systems, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2020; 272p. [Google Scholar]
- Hamdar, S.; Talebpour, A.; Bertini, R. (Eds.) Traffic and Granular Flow. Spec. Issue J. Intell. Transp. Syst. 2020, 24, 535–653. [Google Scholar] [CrossRef]
- Ozbay, K.; Ban, X.; Yang, C.Y.D. (Eds.) Connected and Automated Vehicle-Highway Systems. Spec. Issue J. Intell. Transp. Syst. 2018, 22, 187–275. [Google Scholar] [CrossRef]
- Du, W.; Li, Y.; Zhang, J. Stability analysis and control of an extended car-following model under honk environment. Int. J. ITS Res. 2021. [Google Scholar] [CrossRef]
- Scharfe-Scherf, M.S.L.; Russwinkel, N. Familiarity and complexity during a takeover in highly automated driving. Int. J. ITS Res. 2021, 19, 525–538. [Google Scholar] [CrossRef]
- Guerrieri, M. Smart roads geometric design criteria and capacity estimation based on AV and CAV emerging technologies. A case study in the trans-European transport network. Int. J. ITS Res. 2021, 19, 429–440. [Google Scholar] [CrossRef]
- Chen, M.; Mao, S.; Zhang, Y.; Leung, V.C.M. Big Data. Related Technologies, Challenges and Future Prospects; Springer Briefs in Computer Science; Springer: Berlin/Heidelberg, Germany, 2014; 89p. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics. Data, Models and Simulation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 55–238. [Google Scholar]
- Maerivoet, S.; De Moor, B. Cellular automata models of road traffic. Phys. Rep. 2005, 419, 1–64. [Google Scholar] [CrossRef] [Green Version]
- Sukhinova, A.B.; Trapeznikova, M.A.; Chetverushkin, B.N.; Churbanova, N.G. Two-dimensional macroscopic model of traffic flows. Math. Models Comput. Simul. 2009, 1, 669–676. [Google Scholar] [CrossRef]
- Trapeznikova, M.A.; Furmanov, I.R.; Churbanova, N.G.; Lipp, R. Simulating Multilane Traffic Flows Based on Cellular Automata Theory. Math. Models Comput. Simul. 2012, 4, 53–61. [Google Scholar] [CrossRef]
- Churbanova, N.G.; Chechina, A.A.; Trapeznikova, M.A.; Sokolov, P.A. Simulation of traffic flows on road segments using cellular automata theory and quasigasdynamic approach. Math. Montisnigri 2019, XLVI, 72–90. [Google Scholar] [CrossRef]
- Chetverushkin, B.N. Kinetic Schemes and Quasi-Gas Dynamic System of Equations; CIMNE: Barcelona, Spain, 2008; 298p. [Google Scholar]
- Nagel, K.; Schreckenberg, M. A cellular automaton model for freeway traffic. J. Phys. I France 1992, 2221–2229. [Google Scholar] [CrossRef]
- Chechina, A.; Churbanova, N.; Trapeznikova, M. Driver behaviour algorithms for the cellular automata-based mathematical model of traffic flows. EPJ Web Conf. 2021, 248, 02002. [Google Scholar] [CrossRef]
- Kerner, B.S.; Klenov, S.L.; Schreckenberg, M. Simple cellular automaton model for traffic breakdown, highway capacity, and synchronized flow. Phys. Rev. E 2011, 84, 046110. [Google Scholar] [CrossRef] [PubMed]
- Foster, I. Designing and Building Parallel Programs. Available online: http://www.mcs.anl.gov/~itf/dbpp/ (accessed on 29 December 2021).
- Lighthill, M.J.; Witham, G.B. On kinematic waves (Part II): A theory of traffic flow on long crowded roads. Proc. R. Soc. London Ser. A. Math. Phys. Sci. 1955, 229, 317–345. [Google Scholar] [CrossRef]
- Payne, H. Models of freeway traffic and control. In Mathematical Models of Public Systems; Bekey, G.A., Ed.; Simulation Council: La Jolla, CA, USA, 1971; Volume 3, pp. 51–61. [Google Scholar]
- Bando, M.; Hasebe, K.A.; Nakanishi, A.; Nakayama, A.; Shibata, Y.; Sugiyama, J. Phenomenological Study of Dynamical Model of Traffic Flow. J. Phys. I EDP Sci. 1995, 5, 1389–1399. [Google Scholar] [CrossRef] [Green Version]
- Newell, G.F. A simplified car-following theory: A lower order model. Transp. Res. Part B Methodol. 2002, 36, 195–205. [Google Scholar] [CrossRef]
- Phillips, W. A kinetic model for traffic flow with continuum implications. Transport. Plan. Technol. 1979, 5, 131–138. [Google Scholar] [CrossRef]
- Kuehne, R. Macroscopic freeway model for dense traffic–stop-start waves and incident detection. Transp. Traffic Theory 1984, 9, 20–42. [Google Scholar]
- Kerner, B.; Konhauser, P. Cluster effect in initially homogeneous traffic flow. Phys. Rev. E 1993, 48, 2335–2338. [Google Scholar] [CrossRef]
- Aw, A.; Rascle, M. Resurrection of “second order models” of traffic flow. SIAM J. Appl. Math. 2000, 60, 916–938. [Google Scholar]
- Zhou, J.; Zhang, H.L.; Wang, C.P.; Shi, Z.K. A new lattice model for single-lane traffic flow with the consideration of driver’s memory during a period of time. Int. J. Mod. Physics C 2017, 28, 1750086. [Google Scholar] [CrossRef]
- Jin, D.; Zhou, J.; Zhang, H.L.; Wang, C.P.; Shi, Z.K. Lattice hydrodynamic model for traffic flow on curved road with passing. Nonliear Dyn. 2017, 89, 107–124. [Google Scholar] [CrossRef]
- Kholodov, Y.A.; Alekseenko, A.E.; Vasil’ev, M.O.; Kholodov, A.S. Developing the mathematical model of road junction by the hydrodynamic approach. Comput. Res. Model. 2014, 6, 503–522. [Google Scholar] [CrossRef]
- Kaur, R.; Sharma, S. Analysis of driver’s characteristics on a curved road in lattice model. Phys. A Statstical Mech. Its Appl. 2017, 471, 59–67. [Google Scholar] [CrossRef]
- Cremer, M.; Ludwig, J. A fast simulation model for traffic flow on the basis of boolean operations. Math. Comput. Simul. 1986, 28, 297–303. [Google Scholar] [CrossRef]
- Larraga, M.E.; Alvarez-Icaza, L. Cellular automaton model for traffic flow based on safe driving policies and human reactions. Phys. A Stat. Mech. Its Appl. 2010, 389, 5425–5438. [Google Scholar] [CrossRef]
- Kerner, B.; Klenov, S.; Hermanns, G.; Schreckenberg, M. Effect of driver over-acceleration on traffic breakdown in three-phase cellular automaton traffic flow models. Phys. A Stat. Mech. Its Appl. 2013, 392, 4083–4105. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, Z.; Huang, Q.; Xie, P. Research of vehicle flow based on cellular automaton in different safety parameters. Saf. Sci. 2016, 82, 182–189. [Google Scholar] [CrossRef]
- Hou, G.; Chen, S. An improved cellular automaton model for work zone traffic simulation considering realistic driving behavior. J. Phys. Soc. Jpn. 2019, 88, 084001. [Google Scholar] [CrossRef]
- Top 500. The List. Available online: https://www.top500.org/ (accessed on 27 December 2021).
- Dongarra, J.J.; Luszczek, P.; Petitet, A. The LINPACK Benchmark: Past, present and future. Concurr. Computat. Pract. Exper. 2003, 15, 803–820. [Google Scholar] [CrossRef]
- Trapeznikova, M.A.; Churbanova, N.G.; Lyupa, A.A.; Morozov, D.N. Simulation of Multiphase Flows in the Subsurface on GPU-based Supercomputers. In Parallel Computing: Accelerating Computational Science and Engineering (CSE), Advances in Parallel Computing; IOS Press: Amsterdam, The Netherlands, 2014; Volume 25, pp. 324–333. [Google Scholar] [CrossRef]
- Kerner, B. The Physics of Traffic; Springer: Berlin/Heidelberg, Germany, 2004; 682p. [Google Scholar]
- Chechina, A.A.; Churbanova, N.G.; Trapeznikova, M.A. Comparison of reproduction of spatiotemporal structures of traffic flows using various ways of averaging data. Math. Models Comput. Simul. 2021, 13, 756–762. [Google Scholar] [CrossRef]
- Chechina, A.; Churbanova, N.; Trapeznikova, M.; Ermakov, A.; German, M. Traffic flow modelling on road networks using cellular automata theory. Int. J. Eng. Technol. 2018, 7, 225–227. [Google Scholar] [CrossRef]
- KIAM. The Official Site of Keldysh Institute of Applied Mathematics. Available online: https://www.kiam.ru/MVS/resourses/ (accessed on 28 December 2021).









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chetverushkin, B.; Chechina, A.; Churbanova, N.; Trapeznikova, M. Development of Parallel Algorithms for Intelligent Transportation Systems. Mathematics 2022, 10, 643. https://doi.org/10.3390/math10040643
Chetverushkin B, Chechina A, Churbanova N, Trapeznikova M. Development of Parallel Algorithms for Intelligent Transportation Systems. Mathematics. 2022; 10(4):643. https://doi.org/10.3390/math10040643
Chicago/Turabian StyleChetverushkin, Boris, Antonina Chechina, Natalia Churbanova, and Marina Trapeznikova. 2022. "Development of Parallel Algorithms for Intelligent Transportation Systems" Mathematics 10, no. 4: 643. https://doi.org/10.3390/math10040643
APA StyleChetverushkin, B., Chechina, A., Churbanova, N., & Trapeznikova, M. (2022). Development of Parallel Algorithms for Intelligent Transportation Systems. Mathematics, 10(4), 643. https://doi.org/10.3390/math10040643