1. Introduction
The second order initial value problem with the special form
where
, and
, is under consideration here.
We make an approximation to the solution of problem (
1) at a collection of separate points
using an explicit Runge–Kutta–Nyström (RKN) pair sharing algebraic orders
,
. The format of this method is as follows [
1]
where
is the stepsize. The higher order approximations
are used to propagate the solutions. The weights
and
furnish the lower accuracy approximations used for error estimation.
The latter can be computed by the expression
and the compared can be a very small positive number
set by the user of the pair. Then, using this small number, called tolerance, we may guess the length of the next step length
In the exceptional case when , we do not allow the solution to propagate. We actually repeat the current step and use instead of as its new and shorter version.
All the coefficients can be formulated using the Butcher tableau [
2,
3]. So, the method takes the form
with
,
Pairs of orders six and four (i.e.,
and
) were studied in [
1,
4]. There, pairs DEP6(4) and PT6(4) were respectively presented. The following Butcher tableau characterizes these pairs.
From the tableau above it can be seen that the last stage (i.e., the sixth) shares as coefficients the vector w. These are actually six stages pairs (i.e., ) using the FSAL (First Stage As Last) device. Thus, only five stages are wasted every step. The PT6(4) pair was specially designed to address periodic problems since it shares higher phase-lag order. Reducing the phase lag we try to keep the difference in angles between the theoretical and numerical solution small when integrating harmonic oscillator.
In the following we are interested to study a six stages (i.e., ) pair of orders six and four (i.e., and ). These pairs are shown in the following Butcher tableaus
Such pairs were firstly studied in [
5]. No FSAL device is used on these pairs. In [
5] all the coefficients are expressed with respect to four free parameters that can be chosen arbitrarily. Namely
and
. The pair ER6(4) was presented there, achieving small local truncation errors. However, it seems that we may use seven free parameters for constructing pairs of this form, as will be seen below. We aim to exploit these extra parameters for achieving long imaginary stability intervals.
2. The New Family of Runge–Kutta–Nyström Pairs Sharing Orders 6(4)
According to the relevant theory, there are 47 equations of condition for achieving a pair of orders six and four [
5,
6]. We may consider the simplifying assumption
with
and
the component wise multiplication between the elements of vector
c. Then the number of order conditions reduces to just 29. Another common assumption is
with
the identity matrix. After (
3) holds, only 18 equations remain to be solved. Namely, 13 of them correspond to the higher order formula:
The 1st, 2nd, and 3rd order conditions, respectively.
The 4th order conditions.
The 5th order conditions.
The 6th order conditions.
Whereas for the lower order formula, the following five equations must be satisfied,
In these equations, “∗” is to be understood as a component-wise multiplication among vectors and has the lowest priority after all other operations. Also, , , etc. This latter operation (“raising” a vector to a power) has the highest priority and is evaluated before dot products and “∗”.
The parameters available are 25. Specifically
Thus, we may choose 7 of them arbitrarily. We select and as free parameters. Then we may explicitly evaluate all the remaining coefficients. The algorithm for this is as follows.
Continue evaluating
, and
after solving the linear system
The remaining six equations (except
) for the higher order formula can also be solved explicitly, since they are linear in
. The 13th equation was already satisfied by
. The remaining coefficients of the first column of
(i.e.,
,
,
,
and
) are found by expression (
2).
We proceed by evaluating the weights of the lower order formula. Thus, we set
and conclude by finding
after solving the linear system
with respect to these parameters.
Finally, the coefficients in vectors
w and
can be found explicitly by expressions (
3).
3. Stability Intervals
Having at hand seven free coefficients instead of four we may exploit them in various directions. Here, we will try to derive a pair that performs best on periodic problems.
Following Horn [
7] or Dormand et al. [
1], we consider the test problem
(with
complex). Since
, we conclude to the following recursions for
y and
,
with
. Thus, the RKN methods posses a couple of stability regions associated with their higher orders formulas. Namely, for
y and
. We may produce them requiring
and
. This type of stability analysis is associated to the corresponding A-stability of Runge–Kutta methods.
Let, for
,
with
. Applying the formal Neumann expansion of
and since
is strictly lower triangular, we may write
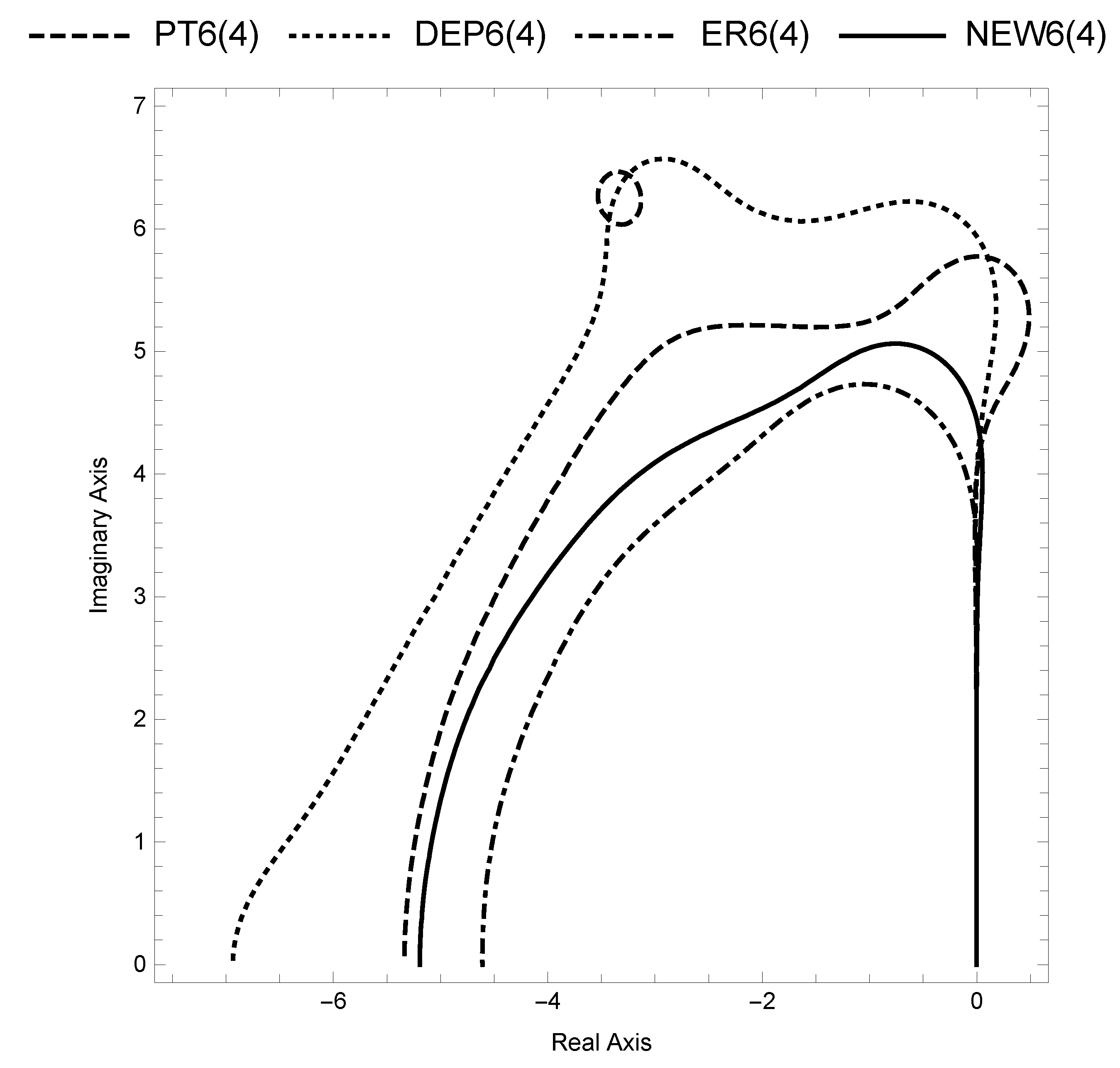
The stability region defined by is characterized by its first cuts (i.e., those closest to origin) with the two axes, i.e., the real and imaginary axes. Thus, we define the corresponding intervals. Namely (i) the real stability interval (ii) the imaginary stability interval with both and being real numbers. Analogously we define the corresponding intervals and associated with .
We focus on pairs with long imaginary stability intervals since such pairs are expected to perform better on periodic problems. For deriving such a method we expressed
and
with respect to the free parameters and
v. Let us assume
,
, i.e., concentrate on the imaginary axis. Then, for a sixth order method, we conclude to
and
Then, we used Differential Evolution Algorithm [
8,
9] for maximizing
v with respect to
and
. We manage to get such a pair (named NEW6(4)) with coefficients presented in the
Appendix A as part of a MATLAB [
10] listing.
In fact, we compute with these coefficients
Observe that for and thus we get an imaginary stability interval for y. Analogously, we may work for .
The main characteristics of the major RKN pairs of orders 6(4) that have appeared until now in the literature are given in
Table 1. As can be seen there, they do not posses an imaginary stability interval for
. In addition, the new pair has longer stability interval for
y. The corresponding regions are presented in
Figure 1 and
Figure 2.
4. Numerical Tests
We tested the following pairs
The problems with periodic solutions selected for tests are the following. All these examples were tested using the listing in the
Appendix A and changing only the coefficients in the preamble according to the pair under consideration.
with analytical solution
. We integrated the problem in the interval
for tolerances
.
The efficiency plot recording the stages used by the four pairs versus the maximum global errors observed over the whole grid is presented in
Figure 3. All figures of efficiency plots are in log-log scale.
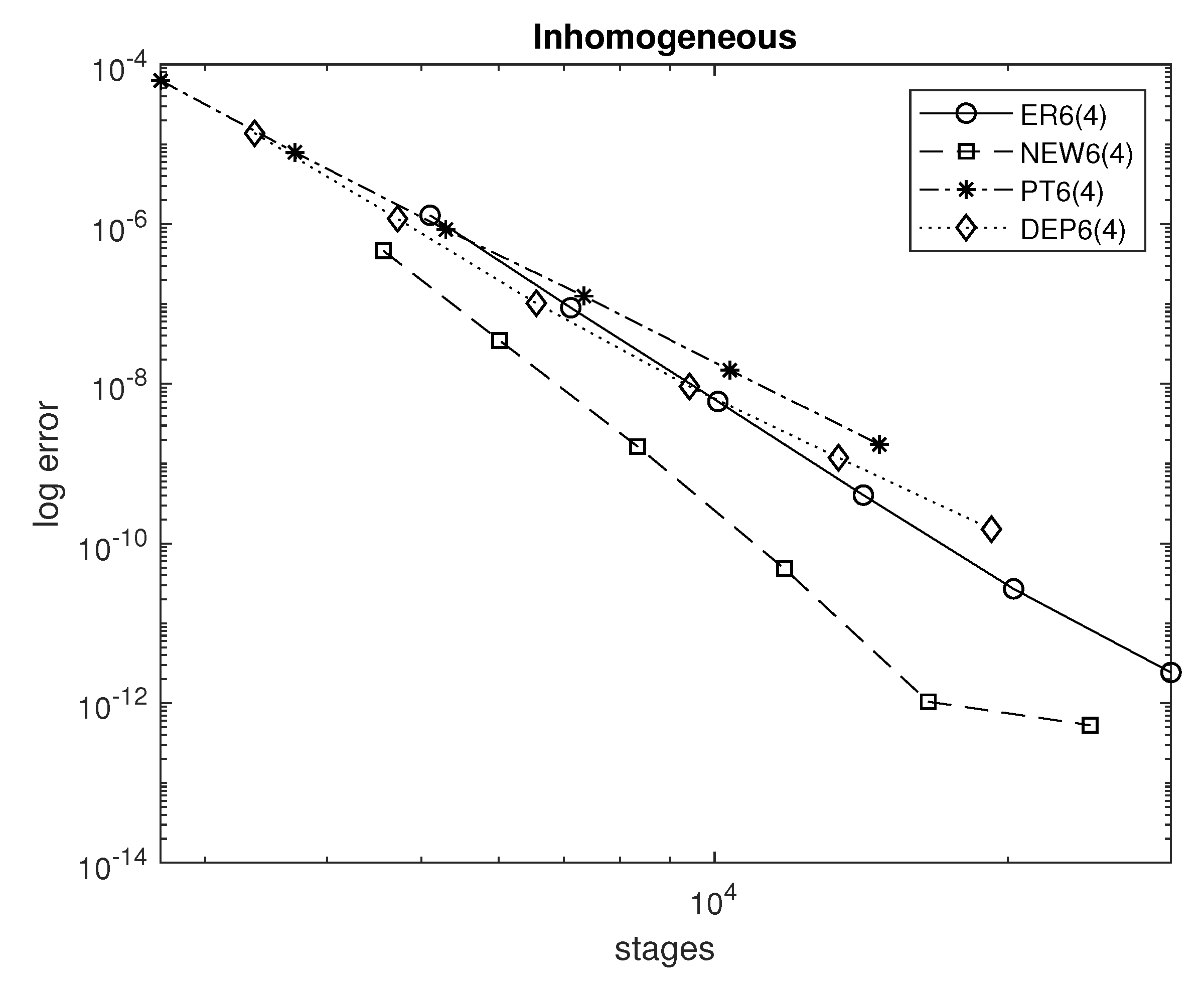
- (B)
In-homogeneous problem [
11]
We integrated the problem in the interval
for tolerances
. The efficiency plot recording the stages used by the four pairs versus the maximum global errors observed over the whole grid is presented in
Figure 4.
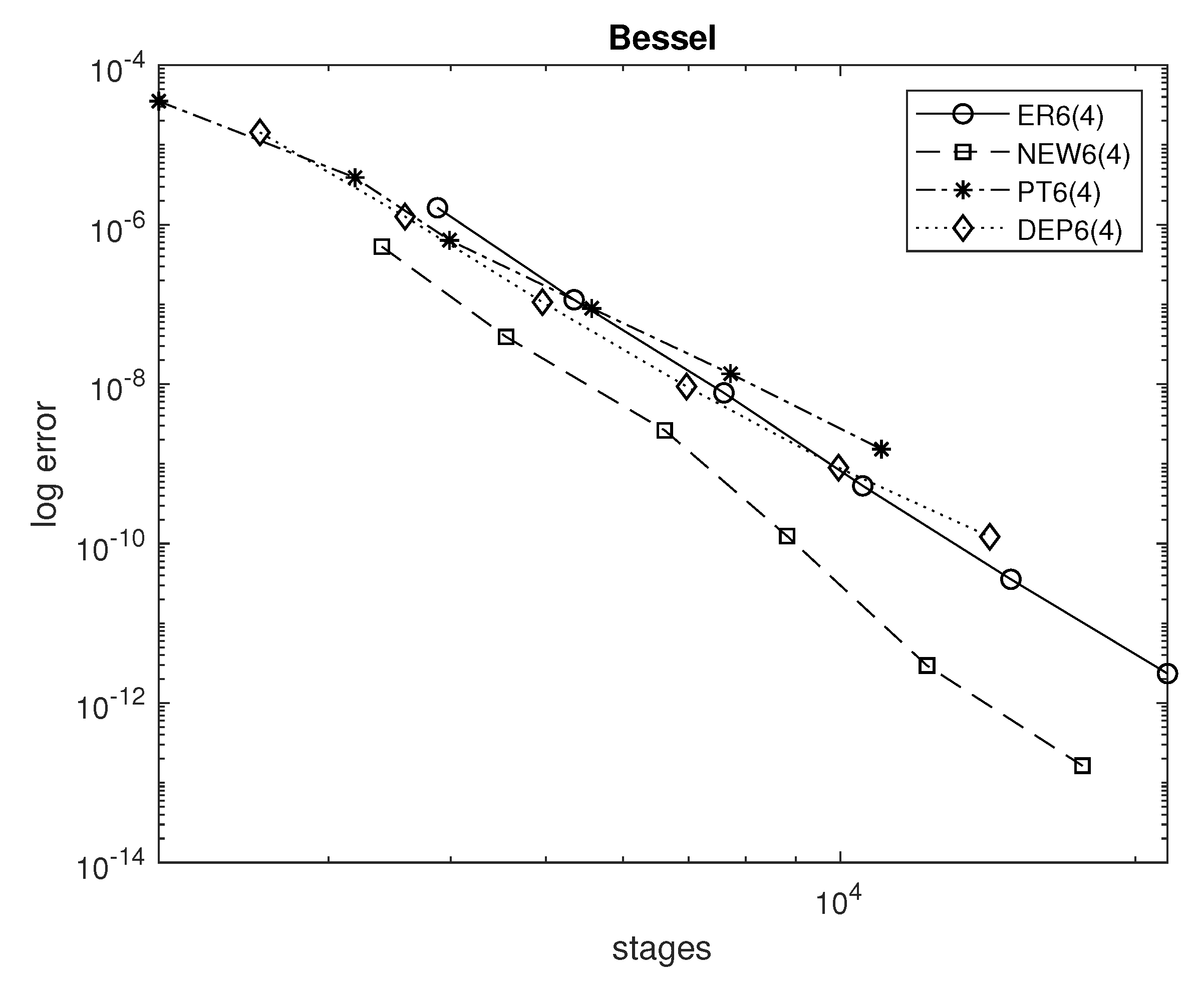
The well known Bessel equation
is verified by an analytical solution of the form
with
being the zeroth order Bessel function of the first kind. We solved the above equation in the interval
for tolerances
. The efficiency plot recording the stages used by the four pairs versus the maximum global errors observed over the whole grid is presented in
Figure 5.
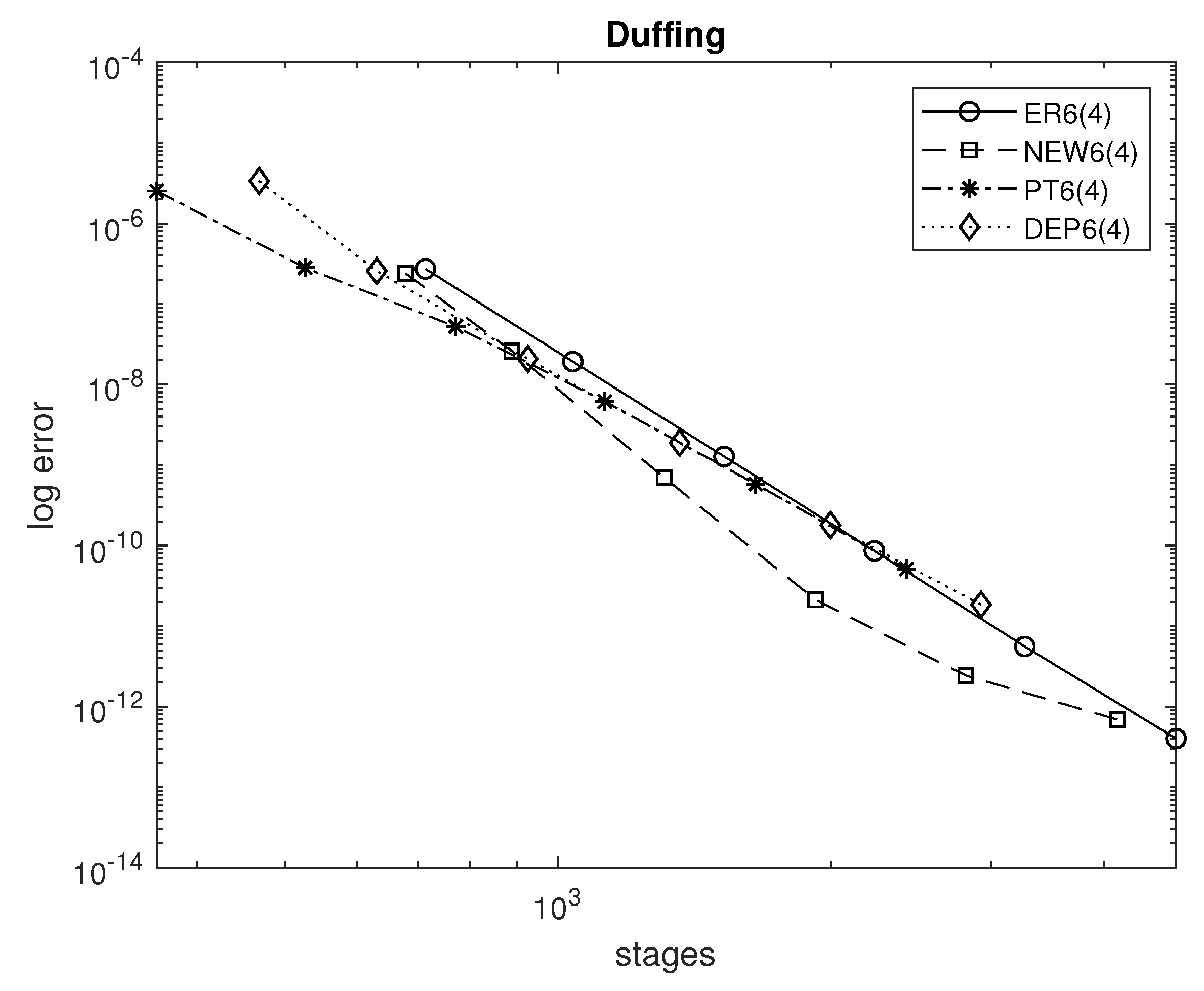
Next, we choose the equation [
13]
with an approximate analytical solution
We solved the above equation in the interval
for tolerances
. The efficiency plot recording the stages used by the four pairs versus the maximum global errors observed over the whole grid is presented in
Figure 6.
The nonlinear problem proposed by Franco and Gomez [
14] follows.
with theoretical solution
Notice that
may be understood here as components of vector
y. We solved the above equation in the interval
for tolerances
. The efficiency plot recording the stages used by the four pairs versus the maximum global errors observed over the whole grid is presented in
Figure 7.
We finally consider the Wave equation of the form [
15],
with the exact solution
We semi-discretisize
with fourth order symmetric differences at internal points and one sided differences of the same order at the boundaries and conclude to the system:
By choosing we arrive at a constant coefficients linear system with Then , , , . In addition, here may be understood as components of vector y.
We solved the above equation in the interval
for tolerances
. The efficiency plot recording the stages used by the four pairs versus the maximum global errors observed over the whole grid is presented in
Figure 8.
The wave equation is a mildly stiff problem. This explains the peculiar performance of the pairs. The maximum accuracy is limited due to the space discretezation error there. Even so, the new pair reaches it faster. Lower order finite difference methods (e.g., Crank–Nicolson) have difficulties in attaining such high accuracies as NEW6(4).
The overall results indicate the superiority of the new pair over non stiff problems with periodic solutions.
It is standard in RKN literature to present comparisons with stages vs. error. This is independent from the hardware used and programming issues. Besides, some runs here ended after very few stages and the timing might be unreliable even using the same machine. In the following we present a couple of figures (in log-log scale) with efficiency plots including times vs. accuracies. The tests were carried on AMD Ryzen 9-3900X, 12-Core Processor at 3.79 GHz. Parallel computation of MATLAB was not applied in time or space direction of the problems.
5. Conclusions
We considered the Runge–Kutta–Nyström pairs of orders 6(4) for addressing the special second order Initial Value Problem. We focused on problems with periodic solutions. Thus, we proposed a new family of such pairs and derived a certain representative with extended imaginary stability regions. The extensive results justified our effort.
Author Contributions
Conceptualization, V.N.K., R.V.F., D.A.G., E.V.T., T.E.S. and C.T.; Data curation, R.V.F., D.A.G., E.V.T., T.E.S. and C.T.; Formal analysis, V.N.K., R.V.F., D.A.G., E.V.T., T.E.S. and C.T.; Funding acquisition, T.E.S.; Investigation, V.N.K., D.A.G., T.E.S. and C.T.; Methodology, E.V.T., T.E.S. and C.T.; Project administration, T.E.S.; Resources, R.V.F., T.E.S. and C.T.; Software, V.N.K., Ruslan V. Fedorov, D.A.G., E.V.T., T.E.S. and C.T.; Supervision, T.E.S.; Validation, V.N.K., R.V.F., T.E.S. and C.T.; Visualization, V.N.K., R.V.F., T.E.S. and C.T.; Writing—review & editing, T.E.S. and C.T. All authors have read and agreed to the published version of the manuscript.
Funding
The research was supported by a Mega Grant from the Government of the Russian Federation within the framework of the federal project No. 075-15-2021-584.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The research was supported by a Mega Grant from the Government of the Russian Federation within the framework of the federal project No. 075-15-2021-584.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
We present a MATLAB listing with a naive program outlining the new implementation NEW6(4). We give explanations for inputs and outputs in the listing. In the following program the coefficients for are given in the vector ww while the coefficients for are given in vector dww.
![Mathematics 10 00875 i004]()
![Mathematics 10 00875 i005]()
We proceed with an application of the above to the semi linear problem for tolerance . Thus, we write in the command window of MATLAB:
![Mathematics 10 00875 i006]()
After this we may extract the stages and the global error observed by typing:
![Mathematics 10 00875 i007]()
The last two numbers above correspond to the bottom rightmost square of
Figure 7.
References
- Dormand, J.R.; El-Mikkawy, M.E.A.; Prince, P.J. Families of Runge-Kutta-Nyström formulae. IMA J. Numer. Anal. 1987, 7, 235–250. [Google Scholar] [CrossRef]
- Butcher, J.C. On Runge-Kutta processes of high order. J. Aust. Math. Soc. 1964, 4, 179–194. [Google Scholar] [CrossRef] [Green Version]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 3rd ed.; John Wiley & Sons: Chichester, UK, 2016. [Google Scholar]
- Papakostas, S.N.; Tsitouras, C. High phase-lag order Runge-Kutta and Nyström pairs. SIAM J. Sci. Comput. 1999, 21, 747–763. [Google Scholar] [CrossRef]
- El-Mikkawy, M.E.A.; Rahmo, E. A new optimized non-FSAL embedded Runge-Kutta-Nyström algorithm of orders 6 and 4 in six stages. Appl. Math. Comput. 2003, 145, 3343. [Google Scholar] [CrossRef]
- Fehlberg, E. Eine Runge-Kutta-Nystrom-Formel g-ter Ordnung rnit Schrittweitenkontrolle fur Differentialgleichungen = f(t,x). ZAMM 1981, 61, 477–485. [Google Scholar] [CrossRef]
- Horn, M.K. Developments in High Order Runge-Kutta-Nystrom Formulas. Ph.D. Thesis, The University of Texas, Austin, TX, USA, 1977. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Storn, R.; Price, K.; Neumaier, A.; Zandt, J.V. DeMat. Available online: https://www.swmath.org/software/24853 (accessed on 23 August 2021).
- Matlab. MATLAB Version 7.10.0; The MathWorks Inc.: Natick, MA, USA, 2010. [Google Scholar]
- Van de Vyver, H. Scheifele two-step methods for perturbed oscillators. J. Comput. Appl. Math. 2009, 224, 415–432. [Google Scholar] [CrossRef] [Green Version]
- Van de Vyver, H. A Runge-Kutta-Nyström pair for the numerical integration of perturbed oscillators. Comput. Phys. Commun. 2005, 167, 129–142. [Google Scholar] [CrossRef]
- Vanden Berghe, G.; Van Daele, M. Exponentially-fitted Obrechkoff methods for second-order differential equations. Appl. Numer. Math. 2009, 59, 815–829. [Google Scholar] [CrossRef]
- Franco, J.M.; Gomez, I. Trigonometrically fitted nonlinear two-step methods for solving second order oscillatory IVPs. Appl. Math. Comput. 2014, 232, 643–657. [Google Scholar] [CrossRef]
- Simos, T.E.; Tsitouras, C. Explicit, Ninth Order, Two Step Methods for solving Inhomogeneous Linear problems x″(t) = Λx(t) + f(t). Appl. Numer. Math. 2020, 153, 344–351. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}