
Research on Location-Routing Problem of Maritime Emergency Materials Distribution Based on Bi-Level Programming

Abstract
:1. Introduction
2. Literature Review
3. Problem Description and Model Construction
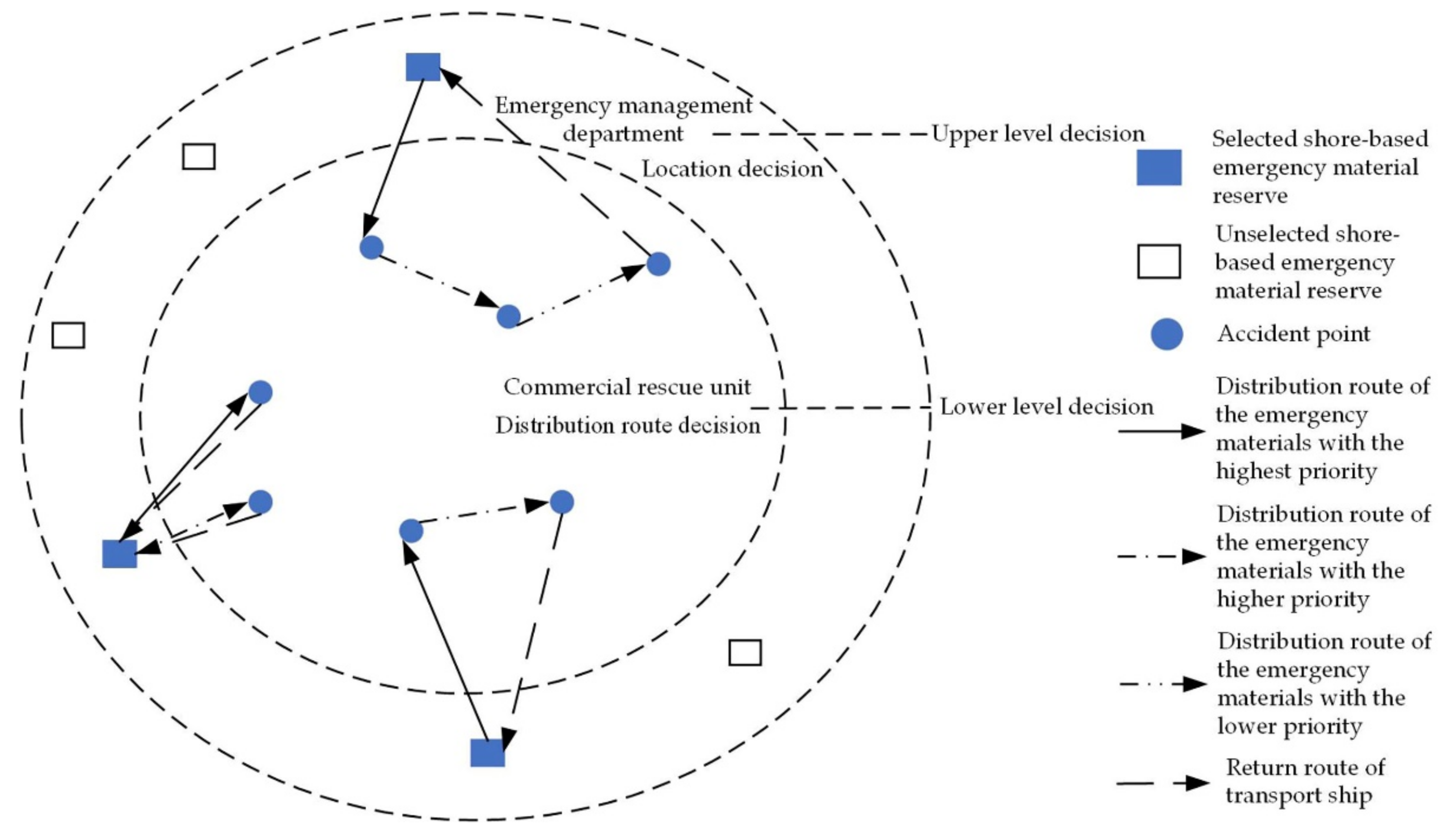
3.1. Problem Description
- Multiple candidate emergency materials reserves with known locations and unlimited capacity.
- Multiple potential accident points with known locations and the drift and diffusion of the accident points are not considered.
- Multiple levels of emergency materials with known priorities; the transportation order of materials is in the order of priority, and the unit distribution cost of different levels of emergency materials is different.
- The number of ships is sufficient, the transport ships are of the same type and capacity, and different levels of emergency materials can be mixed and loaded under the limitation of the time window of the accident point.
- The emergency materials in the candidate reserves are sufficient, the emergency material demand at the accident point is known, the emergency materials storage capacity of each reserve meets the rescue needs of multiple accident points, and the demand at each accident point does not exceed the storage capacity of a single emergency material reserve.
- Each accident point is rescued by only one emergency material reserve, and only one ship passes through the accident point in the process of emergency material distribution at each level, with time window restrictions.
- Each ship belongs to an emergency material reserve. Starting from the warehouse and returning to the warehouse after transporting the materials, each ship can serve multiple accident points under the condition of meeting the time window limit.
3.2. Model Construction
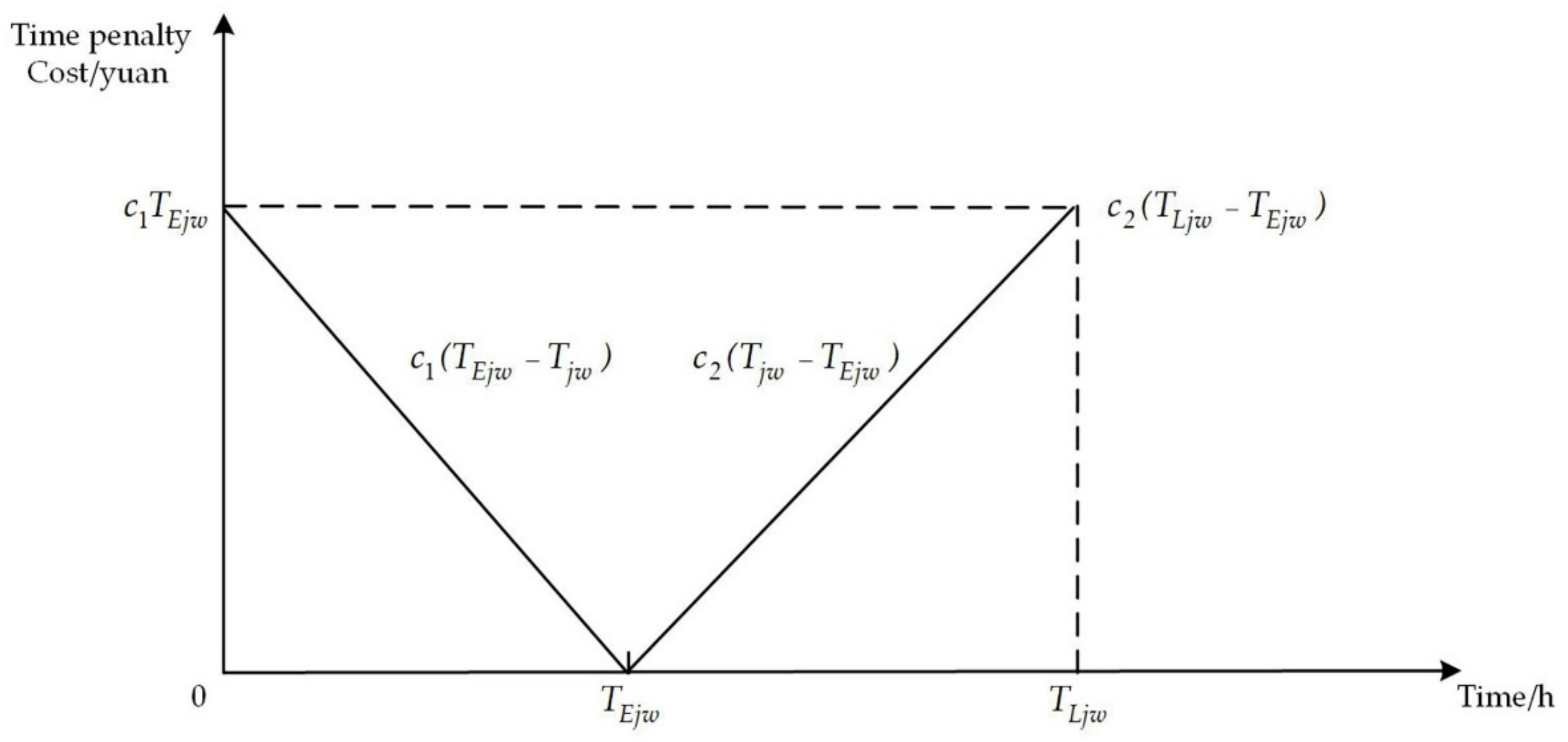
3.2.1. The Time Penalty Cost Description of MEMD-LRP
3.2.2. The Time Satisfaction Loss Cost Description of at Accident Points of MEMD-LRP
3.2.3. The Bi-Level Programming Model of MEMD-LRP
4. Algorithm Design
4.1. Coding and Decoding
4.2. Ant Colony Movement
4.3. Pheromone Update
4.4. Neighborhood Movement
4.5. Tabu Table Length
4.6. Stop Criterion
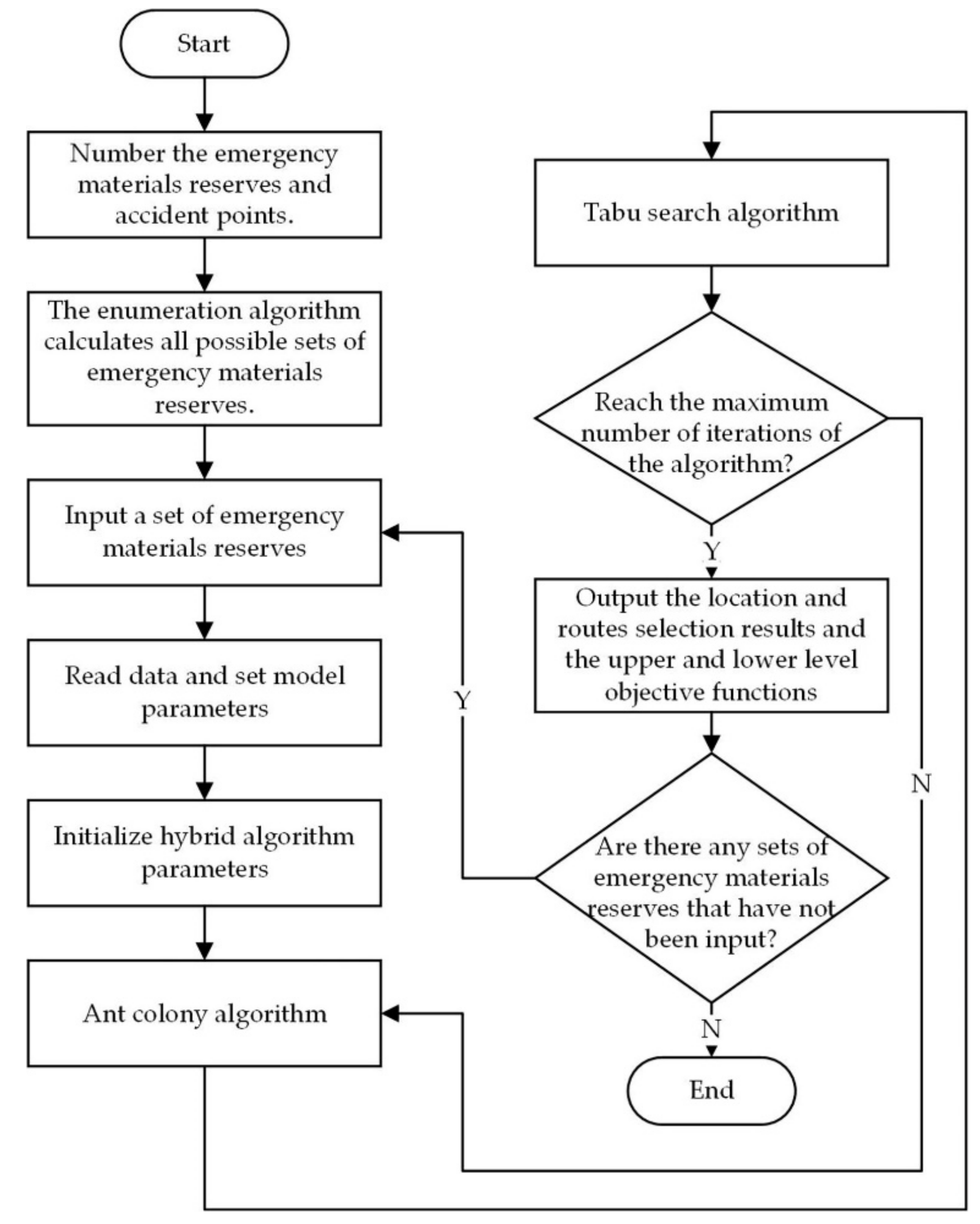
4.7. Specific Steps
5. Results and Discussions
5.1. Introduction of a Numerical Example
5.2. Solution Result and Analysis
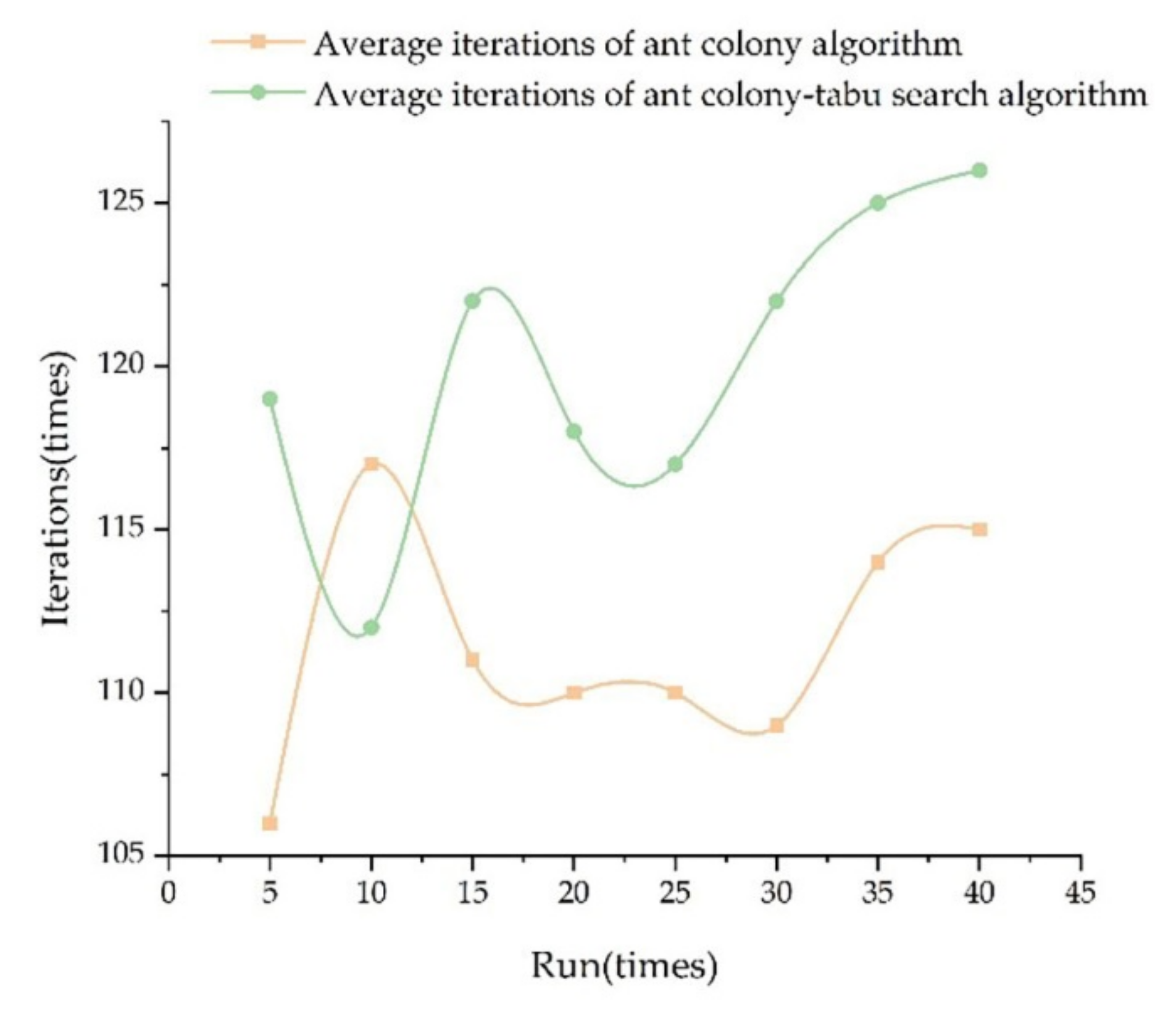
5.2.1. Algorithm Analysis
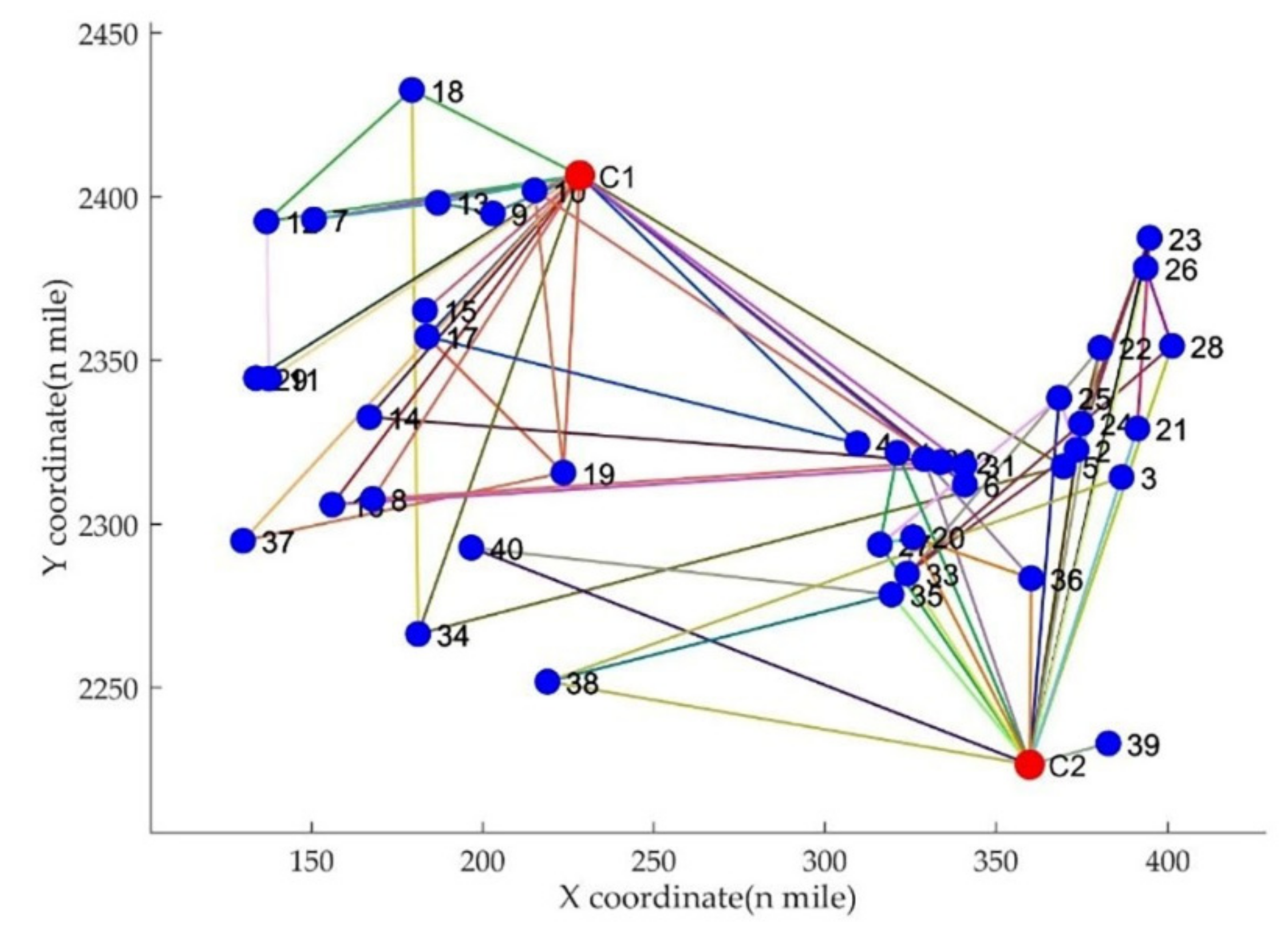
5.2.2. Solution Analysis
5.3. Management Implications
- For the emergency management department of the upper decision-maker, the emergency management department has the priority decision-making power. This department’s decision should consider the benefits of the commercial rescue unit of the lower-level decision-makers while maximizing their benefits to achieve global optimization. Under the premise of meeting the needs of the accident points, the construction number of emergency materials reserves does not need to be high; otherwise, excessive construction of emergency materials reserves will lose the significance of centralized distribution and increase unnecessary construction costs. When there is little difference in the lower cost and there is a large difference in the upper cost, priority can be given to the benefit maximization of the upper level. When the upper cost is the same or there is little difference, while the lower cost is significantly reduced, priority can be given to the benefits of the lower level to achieve global optimization.
- For the commercial rescue unit of the lower-level decision-maker, within the scope permitted by the emergency management department, the rescue unit independently plans the distribution routes of emergency materials to (a) distribute multi-level emergency materials to the accident points within the specified time window and (b) feed the route scheme back to the emergency management department in time. When planning the routes, priority should be given to the regionality of the accident points, and emergency materials should be distributed according to the principle of proximity; however, there can also be a cross-regional distribution within the scope of the time window.
- All participating units in the maritime emergency logistics system shall communicate and coordinate to (a) scientifically and reasonably select the location of the maritime emergency materials reserves and (b) plan the distribution routes of emergency materials to ensure that, in case of a maritime accident, the emergency materials can be delivered to the accident point in time and reliably, provide rescue capacity, control the impact of the accident to the minimum, reduce various losses caused by sudden maritime disasters, and effectively improve the emergency service capability of the maritime emergency logistics system.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pang, H.; Ma, Y.; Mao, T.; Liu, S.; Zhang, Y. Evaluation of Maritime Emergency Rescue Capability Based on Network Analysis. In Proceedings of the 1st International Global on Renewable Energy and Development (IGRED), Singapore, 22–25 December 2017. [Google Scholar]
- Wang, Z.; Lin, B. Q-Learning Based Delay Sensitive Routing Protocol for Maritime Search and Rescue Networks. In Proceedings of the 92nd IEEE Vehicular Technology Conference (IEEE VTC-Fall), Victoria, BC, Canada, 4–7 October 2020. [Google Scholar]
- Jiang, M.; Lu, J. Maritime accident risk estimation for sea lanes based on a dynamic Bayesian network. Marit. Policy. Manag. 2020, 47, 649–664. [Google Scholar] [CrossRef]
- Safety and Shipping Review 2020. Available online: https://www.agcs.allianz.com/news-and-insights/reports/shipping-safety.html (accessed on 15 July 2020).
- European Maritime Safety Agency Preliminary Annual Overview of Marine Casualties and Incidents 2014–2020. Available online: http://www.emsa.europa.eu/publications/item/4378-preliminary-annual-overview-of-marine-casualties-and-incidents-2014-2020.html (accessed on 19 April 2021).
- Statistical Bulletin on the Development of Transportation Industry in 2020. Available online: https://xxgk.mot.gov.cn/2020/jigou/zhghs/202105/t20210517_3593412.html (accessed on 19 May 2021).
- Luo, M.; Shin, S.-H. Half-century research developments in maritime accidents: Future directions. Accid. Anal. Prev. 2019, 123, 448–460. [Google Scholar] [CrossRef] [PubMed]
- Weber, A. Theory of the Location of Industries; The University of Chicago Press: Chicago, IL, USA, 1929. [Google Scholar]
- Dantaig, G.B.; Ramser, J.H. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Cooper, L. The transportation-location problem. Oper. Res. 1972, 20, 94–108. [Google Scholar] [CrossRef] [Green Version]
- Laporte, G.; Nobert, Y. An exact algorithm for minimizing routing and operating costs in depot location. Eur. J. Oper. Res. 1981, 6, 224–226. [Google Scholar] [CrossRef]
- Duan, S.Y.; Lan, H.J. Location-Routing Problem in Post Earthquake Emergency Logistics with Priority Grade. In Proceedings of the 6th International Symposium on Project Management (ISPM), Chongqing, China, 21–23 July 2018. [Google Scholar]
- Liu, C.; Kou, G.; Peng, Y.; Alsaadi, F.E. Location-routing problem for relief distribution in the early post-earthquake stage from the perspective of fairness. Sustainability 2019, 11, 3420. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Tao, F.; Shi, Y.; Qin, R. Optimization of location-routing problem in emergency logistics considering carbon emissions. Int. J. Environ. Res. Public Health 2019, 16, 2982. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Tao, F.; Shi, Y. Optimization of location-routing problem for cold chain logistics considering carbon footprint. Int. J. Environ. Res. Public Health 2018, 15, 86. [Google Scholar] [CrossRef] [Green Version]
- Dukkanci, O.; Kara, B.Y.; Bektas, T. The green location-routing problem. Comput. Oper. Res. 2019, 105, 187–202. [Google Scholar] [CrossRef]
- Yu, X.; Zhou, Y.; Liu, X.-F. A novel hybrid genetic algorithm for the location routing problem with tight capacity constraints. Appl. Soft. Comput. 2019, 85, 105760. [Google Scholar] [CrossRef]
- Wang, X.F.; Yang, F.; Lu, D.W. Multi-objective location-routing problem with simultaneous pickup and delivery for urban distribution. J. Intell. Fuzzy. Syst. 2018, 35, 3987–4000. [Google Scholar] [CrossRef]
- Fan, H.M.; Wu, J.X.; Li, X.; Jiang, X. Presenting a multi-start hybrid heuristic for solving the problem of two-echelon location-routing problem with simultaneous pickup and delivery (2E-LRPSPD). J. Adv. Transport. 2020, 2020, 9743841. [Google Scholar] [CrossRef]
- Tavana, M.; Abtahi, A.R.; Di Caprio, D.; Hashemi, R.; Yousefi-Zenouz, R. An integrated location-inventory-routing humanitarian supply chain network with pre- and post-disaster management considerations. Socio-Econ. Plan. Sci. 2018, 64, 21–37. [Google Scholar] [CrossRef]
- Wei, X.; Qiu, H.; Wang, D.; Duan, J.; Wang, Y.; Cheng, T.C.E. An integrated location-routing problem with post-disaster relief distribution. Comput. Ind. Eng. 2020, 147, 106632. [Google Scholar] [CrossRef]
- Vahdani, B.; Veysmoradi, D.; Shekari, N.; Mousavi, S.M. Multi-objective, multi-period location-routing model to distribute relief after earthquake by considering emergency roadway repair. Neural Comput. Appl. 2018, 30, 835–854. [Google Scholar] [CrossRef]
- Xue, H.; Wang, Y.; Liao, Z.; Xu, R.; Xu, Z. Research on emergency material optimization scheduling and importance decision in cluster supply chain. In Proceedings of the Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020. [Google Scholar]
- Li, S.; Grifoll, M.; Estrada, M.; Zheng, P.; Feng, H. Optimization on emergency materials dispatching considering the characteristics of integrated emergency response for large-scale marine oil spills. J. Mar. Sci. Eng. 2019, 7, 214. [Google Scholar] [CrossRef] [Green Version]
- Ai, Y.-F.; Lu, J.; Zhang, L.-L. The optimization model for the location of maritime emergency supplies reserve bases and the configuration of salvage vessels. Transport. Res. E-Log. 2015, 83, 170–188. [Google Scholar] [CrossRef]
- Ai, Y.; Zhang, Q. Optimization on cooperative government and enterprise supplies repertories for maritime emergency: A study case in China. Adv. Mech. Eng. 2019, 11, 1687814019828576. [Google Scholar] [CrossRef]
- Zhang, L.; Lu, J.; Yang, Z. Optimal scheduling of emergency resources for major maritime oil spills considering time-varying demand and transportation networks. Eur. J. Oper. Res. 2021, 293, 529–546. [Google Scholar] [CrossRef]
- Bozorgi-Amiri, A.; Khorsi, M. A dynamic multi-objective location-routing model for relief logistic planning under uncertainty on demand, travel time, and cost parameters. Int. J. Adv. Manuf. Technol. 2016, 85, 1633–1648. [Google Scholar] [CrossRef]
- Chang, K.; Zhou, H.; Chen, G.; Chen, H. Multiobjective location routing problem considering uncertain data after disasters. Discrete Dyn. Nat. Soc. 2017, 2017, 1703608. [Google Scholar] [CrossRef]
- Veysmoradi, D.; Vahdani, B.; Sartangi, M.F.; Mousavi, S.M. Multi-objective open location-routing model for relief distribution networks with split delivery and multi-mode transportation under uncertainty. Sci. Iran. 2018, 25, 3635–3653. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.H.; Cao, Y.R.; Xiao, Y.; Guo, J. Finding of urban rainstorm and waterlogging disasters based on microblogging data and the location-routing problem model of urban emergency logistics. Ann. Oper. Res. 2020, 290, 865–896. [Google Scholar] [CrossRef]
- Zhang, B.; Li, H.; Li, S.G.; Peng, J. Sustainable multi-depot emergency facilities location-routing problem with uncertain information. Appl. Math. Comput. 2018, 333, 506–520. [Google Scholar] [CrossRef]
- Hu, S.; Han, C.; Dong, Z.S.; Meng, L. A multi-stage stochastic programming model for relief distribution considering the state of road network. Transport. Res. B-Meth. 2019, 123, 64–87. [Google Scholar] [CrossRef]
- Liu, J.; Guo, L.; Jiang, J.; Jiang, D.; Liu, R.; Wang, P. A two-stage optimization model for emergency material reserve layout planning under uncertainty in response to environmental accidents. J. Hazard. Mater. 2016, 310, 30–39. [Google Scholar] [CrossRef]
- Xiong, X.; Zhao, F.; Wang, Y.; Wang, Y. Research on the model and algorithm for multimodal distribution of emergency supplies after earthquake in the perspective of fairness. Math. Probl. Eng. 2019, 2019, 1629321. [Google Scholar] [CrossRef]
- Qin, X.; Liu, X.; Tang, L. A two-stage stochastic mixed-integer program for the capacitated logistics fortification planning under accidental disruptions. Comput. Ind. Eng. 2013, 65, 614–623. [Google Scholar] [CrossRef]
- Liu, Y.; Lei, H.; Zhang, D.; Wu, Z. Robust optimization for relief logistics planning under uncertainties in demand and transportation time. Appl. Math. Model. 2018, 55, 262–280. [Google Scholar] [CrossRef]
- Liu, Y.; Yuan, Y.; Chen, Y.; Ruan, L.; Pang, H. A Chance Constrained Goal Programming Model for Location-Routing Problem under Uncertainty. In Proceedings of the 3rd International Conference on Logistics, Informatics and Service Science (LISS), Beijing Jiaotong Univ, Sch Econ & Management, Reading, UK, 21–24 August 2013. [Google Scholar]
- Xu, J.P.; Wang, Z.Q.; Zhang, M.X.; Tu, Y. A new model for a 72-h post-earthquake emergency logistics location-routing problem under a random fuzzy environment. Transp. Lett. 2016, 8, 270–285. [Google Scholar] [CrossRef]
- Lou, Z. Bi-level programming model and algorithm of LRP for emergency logistics system. Chin. J. Manag. Sci. 2017, 25, 151–157. [Google Scholar]
- Safaei, A.S.; Farsad, S.; Paydar, M.M. Emergency logistics planning under supply risk and demand uncertainty. Oper. Res.-Ger. 2020, 20, 1437–1460. [Google Scholar] [CrossRef]
- Chen, Y.-X.; Tadikamalla, P.R.; Shang, J.; Song, Y. Supply allocation: Bi-level programming and differential evolution algorithm for natural disaster relief. Clust. Comput. 2020, 23, 203–217. [Google Scholar] [CrossRef]
- Li, S.; Teo, K.L. Post-disaster multi-period road network repair: Work scheduling and relief logistics optimization. Ann. Oper. Res. 2019, 283, 1345–1385. [Google Scholar] [CrossRef]
- Zhou, Y.F.; Zheng, B.; Su, J.F.; Li, Y.F. The joint location-transportation model based on grey bi-level programming for early post-earthquake relief. J. Ind. Manag. Optim. 2022, 18, 45–73. [Google Scholar] [CrossRef]
- Wang, D.P.; Xu, Z.; Yang, C. Study on location-routing problem of logistics distribution based on two-stage heuristic algorithm. Oper. Res. Manag. Sci. 2017, 26, 70–75+83. [Google Scholar]
- Zhang, L.Y.; Lyu, J.; Liang, X.; Fan, H.W. Optimal scheduling of emergency supplies for major maritime accidents considering multiple demand sites. Syst. Eng. 2021, 39, 103–114. [Google Scholar]
- Chen, J.; Gui, P.; Ding, T.; Na, S.; Zhou, Y. Optimization of transportation routing problem for fresh food by improved ant colony algorithm based on tabu search. Sustainability 2019, 11, 6584. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Tu, W.; Zhuo, L. Reliable rescue routing optimization for urban emergency logistics under travel time uncertainty. ISPRS Int. J. Geo.-Inf. 2018, 7, 77. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Uncertainty | Maritime Emergency | Multiple Types of Emergency Materials | Time Window | Improved Algorithm |
|---|---|---|---|---|---|
| Liu et al. [13] | √ | √ | |||
| Tavana et al. [20] | √ | √ | |||
| Wei et al. [21] | √ | √ | |||
| Vahdani et al. [22] | √ | ||||
| Xue et al. [23] | √ | ||||
| Li et al. [24] | √ | √ | |||
| Ai et al. [25] | √ | √ | |||
| Ai et al. [26] | √ | √ | |||
| Shen et al. [14] | √ | √ | |||
| Zhang et al. [27] | √ | √ | √ | ||
| Bozorgi-Amiri et al. [28] | √ | √ | |||
| Chang et al. [29] | √ | √ | |||
| Veysmoradi et al. [30] | √ | √ | |||
| Wu et al. [31] | √ | ||||
| Zhang et al. [32] | √ | √ | |||
| Hu et al. [33] | √ | √ | √ | ||
| Liu et al. [34] | √ | √ | |||
| Xiong et al. [35] | √ | √ | √ | √ | |
| Qin et al. [36] | √ | √ | |||
| Liu et al. [37] | √ | ||||
| Liu et al. [38] | √ | √ | |||
| This paper | √ | √ | √ | √ |
| Date | Accident | Number of People Involved | Economic Loss (CNY 10,000) | Accident Level |
|---|---|---|---|---|
| 9 November 2016 | Collision accident between “Xiangping River Cargo 0306” and “Jihuanggang Fishing Boat 19” | 3 | 92 | Larger |
| 18 December 2017 | Collision accident between “Yongyue 66” and “Lushouyu 60687” | 8 | 100 | Larger |
| 13 April 2017 | Collision accident between “Haiyang 207” and “NanDongting 6” | 2 | 625 | General |
| 18 September 2018 | Collision accident between “C” and “W9099” | 0 | 600 | General |
| 3 September 2019 | Collision accident between “K” and “L23626” | 1 | 200 | General |
| 22 September 2020 | Collision accident between “XCH” and “Jileyu XXXXX” | 0 | 30 | Small |
| Number | Port | Longitude | Latitude | |
|---|---|---|---|---|
| 1 | Dalian Port | 121°39′17″ | 38°55′44″ | 20 |
| 2 | Yingkou Port | 122°06′00″ | 40°17′42″ | 18 |
| 3 | Tianjin Port | 117°42′05″ | 38°59′08″ | 20 |
| 4 | Qinhuangdao Port | 119°36′26″ | 39°54′24″ | 20 |
| 5 | Weifang Port | 120°19′05″ | 36°04′ | 18 |
| 6 | Yantai Port | 121°23′46.9″ | 37°32′51.8″ | 20 |
| Number | Longitude | Latitude | Accident Level | |||
|---|---|---|---|---|---|---|
| 1 | 118°06′1″ | 38°52′2″ | 8 | 1 | 7 | Larger |
| 2 | 119°13′.7 | 38°52′.3 | 6 | 2 | 8 | General |
| 3 | 119°29.6′ | 38°43.3′ | 6 | 2 | 8 | General |
| 4 | 117°51′.6 | 38°55′.5 | 5 | 2 | 8 | General |
| 5 | 119°08′.1 | 38°47′.3 | 0 | 0 | 0 | Small |
| 6 | 118°31′.9 | 38°42′.3 | 0 | 0 | 0 | Small |
| 7 | 120°25′.78 | 40°02′.95 | 7 | 1 | 7 | Larger |
| 8 | 120°50′.23 | 38°37′.44 | 8 | 1 | 7 | Larger |
| 9 | 121°33′15.54″ | 40°05′13.86″ | 7 | 1 | 7 | Larger |
| 10 | 121°48.80′ | 40°12.24′ | 6 | 1 | 7 | Larger |
| 11 | 120°10′.98 | 39°13′ | 8 | 1 | 7 | Larger |
| 12 | 120°07′.211 | 40°01′.560 | 7 | 1 | 7 | Larger |
| 13 | 121°12′.88 | 40°08′.59 | 5 | 2 | 8 | General |
| 14 | 120°48′00.96″ | 39°02′46.56″ | 6 | 2 | 8 | General |
| 15 | 121°08′49”.17 | 39°35′49”.18 | 5 | 2 | 8 | General |
| 16 | 120°35′48.42″ | 38°35′34.92″ | 4 | 2 | 8 | General |
| 17 | 121°09′ | 39°27′ | 5 | 2 | 8 | General |
| 18 | 121°01.08′ | 40°42.31′ | 5 | 2 | 8 | General |
| 19 | 122°01′.3 | 38°46′.2 | 6 | 2 | 8 | General |
| 20 | 118°11.39′ | 38°26.19′ | 8 | 1 | 7 | Larger |
| Number of Reserves Constructed | Feasible Reserve Set | Upper Objective Function Value (CNY) | Lower Objective Function Value (CNY) |
|---|---|---|---|
| 2 | (1,4) | 400,621 | 88,388.13 |
| 2 | (1,5) | 380,621 | 90,357.17 |
| 2 | (2,3) | 380,621 | 85,030.14 |
| 2 | (2,5) | 360,621 | 89,078.48 |
| 2 | (3,6) | 400,621 | 93,957.46 |
| 2 | (4,6) | 400,621 | 94,432.83 |
| 3 | (1,2,3) | 580,621 | 94,031.79 |
| 3 | (1,2,4) | 580,621 | 87,522.29 |
| 3 | (1,3,4) | 600,621 | 87,095.50 |
| 3 | (1,3,5) | 580,621 | 92,320.94 |
| 3 | (1,3,6) | 600,621 | 93,290.49 |
| 3 | (1,4,5) | 580,621 | 81,984.93 |
| 3 | (1,4,6) | 600,621 | 85,566.20 |
| 3 | (2,3,4) | 580,621 | 88,886.87 |
| 3 | (2,4,5) | 560,621 | 93,514.44 |
| 3 | (2,4,6) | 580,621 | 94,088.88 |
| 3 | (2,5,6) | 560,621 | 88,560.94 |
| 3 | (3,4,6) | 600,621 | 84,988.67 |
| 3 | (3,5,6) | 580,621 | 91,868.98 |
| 4 | (1,2,3,4) | 780,621 | 79,176.22 |
| 4 | (1,2,3,5) | 760,621 | 83,445.32 |
| 4 | (1,2,3,6) | 780,621 | 91,623.80 |
| 4 | (1,2,4,5) | 760,621 | 86,400.66 |
| 4 | (1,2,5,6) | 760,621 | 89,852.23 |
| 4 | (1,3,4,5) | 780,621 | 83,745.40 |
| 4 | (1,3,4,6) | 800,621 | 86,068.29 |
| 4 | (1,3,5,6) | 780,621 | 91,003.71 |
| 4 | (1,4,5,6) | 780,621 | 82,959.10 |
| 4 | (2,3,4,5) | 760,621 | 88,423.75 |
| 4 | (2,3,4,6) | 780,621 | 83,243.21 |
| 4 | (2,3,5,6) | 760,621 | 89,076.61 |
| 4 | (2,4,5,6) | 760,621 | 95,240.82 |
| 4 | (3,4,5,6) | 780,621 | 84,848.72 |
| 5 | (1,2,3,4,5) | 960,621 | 85,884.94 |
| 5 | (1,2,3,4,6) | 980,621 | 85,426.08 |
| 5 | (1,2,3,5,6) | 960,621 | 86,749.95 |
| 5 | (1,2,4,5,6) | 960,621 | 84,223.97 |
| 5 | (1,3,4,5,6) | 980,621 | 88,462.68 |
| 5 | (2,3,4,5,6) | 960,621 | 91,765.69 |
| 6 | (1,2,3,4,5,6) | 1160,621 | 86,693.65 |
| Number of Reserves Constructed | Feasible Reserve Set | Upper Objective Function Value (CNY) | Lower Objective Function Value (CNY) |
|---|---|---|---|
| 3 | (1,2,4) | 580,621 | 99,227.50 |
| 5 | (1,2,3,5,6) | 960,621 | 103,418.47 |
| 6 | (1,2,3,4,5,6) | 1,160,621 | 87,152.38 |
| Reserves | Upper Total Cost (CNY) | Time Satisfaction Loss Cost (CNY) | Lower Total Cost (CNY) | Emergency Materials Distribution Cost (CNY) | Ship Dispatch Cost (CNY) | Shipping Cost (CNY) | Time Penalty Cost (CNY) |
|---|---|---|---|---|---|---|---|
| (2,5) | 360,621 | 621 | 89,078.47 | 2494 | 64,800 | 7330.37 | 14,454.11 |
| Reserves | Accident Points of Reserves Service | Ship | Distribution Routes (Emergency Materials Level in Parentheses) |
|---|---|---|---|
| 2 | 4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,29,31,32,34,37 | 1 | 0-7(1)-0 |
| 2 | 0-15(1)-0 | ||
| 3 | 0-37(1)-0 | ||
| 4 | 0-11(1)-12(1)-0 | ||
| 5 | 0-17(1)-19(1)-0 | ||
| 6 | 0-13(1)-7(2)-0 | ||
| 7 | 0-4(1)-17(2)-0 | ||
| 8 | 0-34(1)-5(2)-0 | ||
| 9 | 0-10(1)-19(2)-37(3)-0 | ||
| 10 | 0-8(1)-32(1)-10(2)-0 | ||
| 5 | 1,2,3,20,21,22,23,24,25,26,27,28,30,33,35,36,38,39,40 | 1 | 0-1(1)-0 |
| 2 | 0-24(1)-0 | ||
| 3 | 0-26(1)-0 | ||
| 4 | 0-39(1)-0 | ||
| 5 | 0-35(1)-38(1)-0 | ||
| 6 | 0-33(1)-20(1)-36(1)-30(1)-0 | ||
| 7 | 0-3(1)-21(1)-23(1)-0 | ||
| 8 | 0-27(1)-25(1)-2(1)-0 | ||
| 9 | 0-22(1)-35(2)-40(2)-0 | ||
| 10 | 0-28(1)-33(2)-2(2)-23(2)-24(3)-0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Z.; Wang, C.; Xu, W.; Zhang, J. Research on Location-Routing Problem of Maritime Emergency Materials Distribution Based on Bi-Level Programming. Mathematics 2022, 10, 1243. https://doi.org/10.3390/math10081243
Peng Z, Wang C, Xu W, Zhang J. Research on Location-Routing Problem of Maritime Emergency Materials Distribution Based on Bi-Level Programming. Mathematics. 2022; 10(8):1243. https://doi.org/10.3390/math10081243
Chicago/Turabian StylePeng, Zhongxiu, Cong Wang, Wenqing Xu, and Jinsong Zhang. 2022. "Research on Location-Routing Problem of Maritime Emergency Materials Distribution Based on Bi-Level Programming" Mathematics 10, no. 8: 1243. https://doi.org/10.3390/math10081243
APA StylePeng, Z., Wang, C., Xu, W., & Zhang, J. (2022). Research on Location-Routing Problem of Maritime Emergency Materials Distribution Based on Bi-Level Programming. Mathematics, 10(8), 1243. https://doi.org/10.3390/math10081243