
Experimental Analysis of Quantum Annealers and Hybrid Solvers Using Benchmark Optimization Problems



Abstract
:1. Introduction
1.1. Related Work
1.2. Organization
2. The Standard QUBO Formulation
- asserts that every vertex must appear in exactly one position of the tour;
- states that each position of the tour is occupied by precisely one vertex;
- requires that the tour is comprised of edges that “really” exist. If the tour, mistakenly, contains a “phantom” edge, i.e., an edge belonging to , then this will incur an energy penalty;
- computes the cost or weight of the tour. A tour minimizing this Hamiltonian is an optimal tour.
- The Hamiltonians and , as given in (13) and (14), require a constant term, namely, n, linear constraints, and quadratic constraints, which brings the total number of constraints to . The linear constraints are the same in both and , but the quadratic constraints are different;
- If the graph is complete, then does not add any new constraints. To be precise, involves quadratic constraints, which are also present in the Hamiltonian. Hence, only enhances the relative weight of existing constraints;
- If the graph is not complete, then creates, for each missing edge that is not a self-loop, i.e., , n additional constraints. If k such edges are missing, there will be additional quadratic constraints in total. This fact is experimentally validated from the results presented in Section 5.3;
- In a complete graph with n nodes, introduces quadratic constraints, where stands for the number of edges in the graph. This formula can be generalized further to the case where the graph is not complete and has m edges. In such a case, will add quadratic constraints.
- In a complete graph, requires binary variables and constraints in total (recall that the linear constraints are the same). If the graph is not complete, it requires more constraints: specifically, , where k is the number of missing edges;
- For a complete graph, requires binary variables, quadratic constraints, and constraints in total. If the graph is not complete, it requires , where m is the number of existing edges and k is the number of missing edges;
- In the typical and practically important case where we have a simple graph, that is, a graph with no self-loops and no parallel edges, then . The previous formulas now give quadratic constraints and total constraints. In this case, the number of constraints required for the Hamiltonian is equal to the number of constraints required when the graph is complete.
3. The Matrix QUBO Formulation



















4. Normalizing Graph Weights
| Algorithm 1: Min-max normalization. |
 |

5. Experimenting on D-Wave’s QPU
5.1. HCP Using QPU
5.2. TSP Using QPU
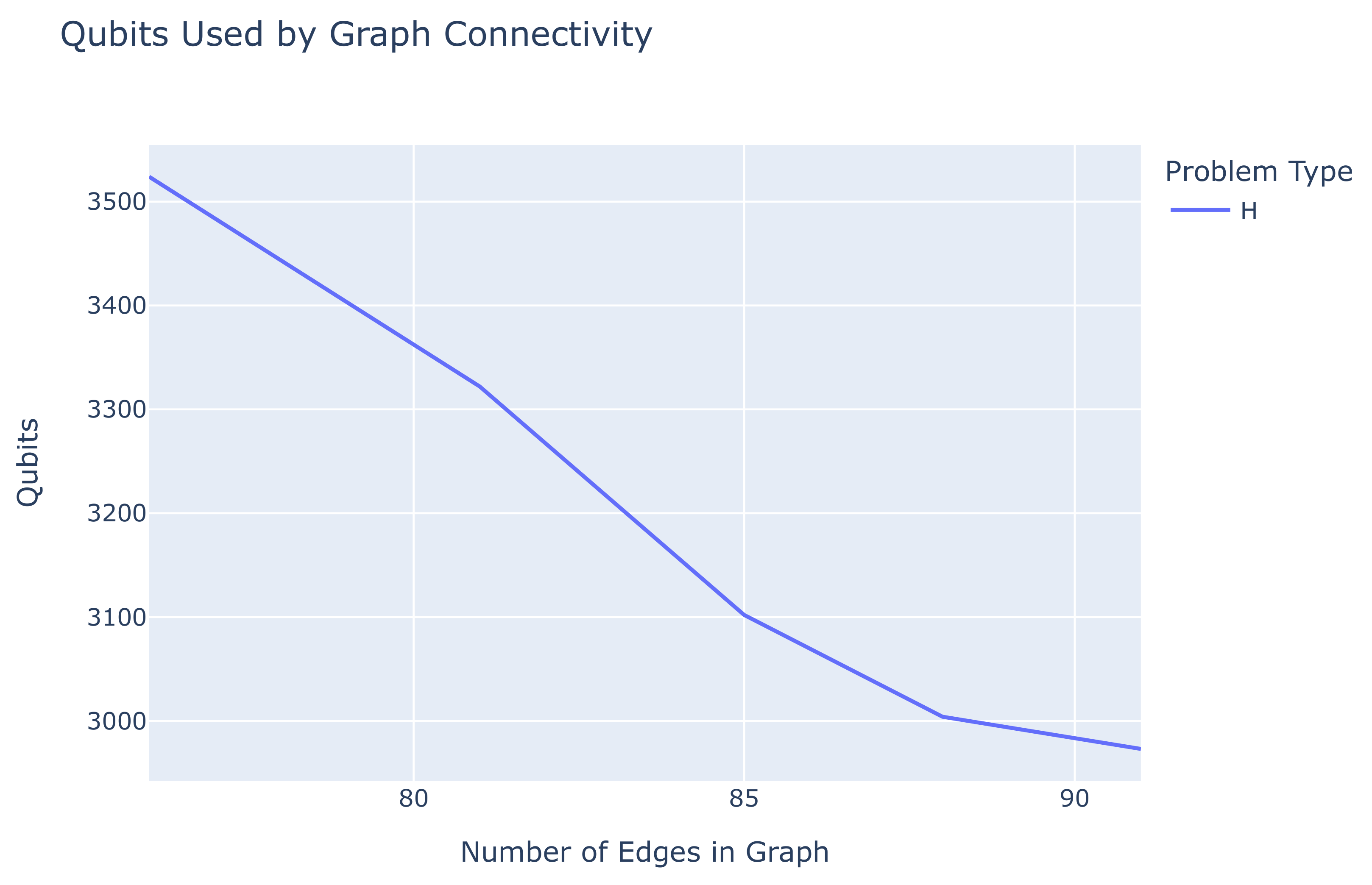
5.3. The Effect of Graph Connectivity on Qubit Usage
6. Experimenting on D-Wave’s Leap’s Hybrid Solvers
6.1. HCP Using LeapHybridSampler
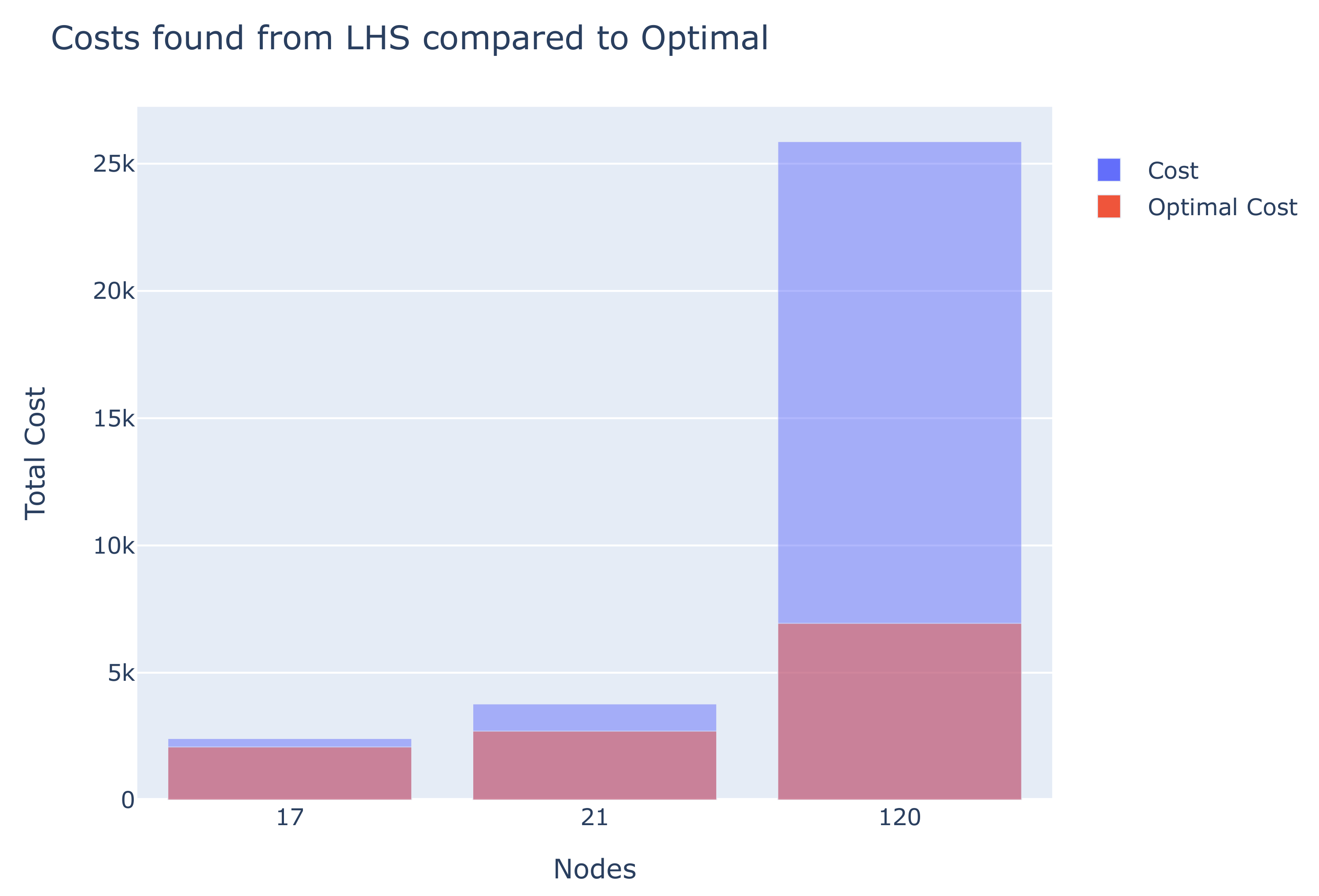
6.2. TSP Using LeapHybridSampler
7. Discussion and Conclusions
- D-Wave’s Advantage_system4.1 is more efficient than the Advantage_system1.1 in its use of qubits for solving a problem and provides more consistently correct solutions;
- It is possible to run the Burma14 instance of the TSPLIB library on a quantum annealer using the aforementioned methods, although it cannot provide a “correct” solution because of the annealer’s limitations;
- The more connected a graph is, the fewer qubits are needed for it to be solved by the quantum annealers, as fewer constraints need to be imposed;
- Hybrid solvers always provide a correct solution to a problem and never break the constraints of a QUBO model, even for arbitrarily big problems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feynman, R.P. Simulating physics with computers. Int. J. Theor. Phys. 1982, 21, 467–488. [Google Scholar] [CrossRef]
- Shor, P.W. Polynomial-time algorithms for prime factorization and discrete logarithms on a quantum computer. SIAM Rev. 1999, 41, 303–332. [Google Scholar] [CrossRef]
- Grover, L. A fast quantum mechanical algorithm for database search. In Proceedings of the Twenty-Eighth Annual ACM Symposium on the Theory of Computing, Philadelphia, PA, USA, 22–24 May 1996. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, M.A.; Chuang, I.L. Quantum Computation and Quantum Information; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Kadowaki, T.; Nishimori, H. Quantum annealing in the transverse Ising model. Phys. Rev. E 1998, 58, 5355. [Google Scholar] [CrossRef] [Green Version]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Pakin, S. Performing fully parallel constraint logic programming on a quantum annealer. Theory Pract. Log. Program. 2018, 18, 928–949. [Google Scholar] [CrossRef] [Green Version]
- Papalitsas, C.; Karakostas, P.; Andronikos, T.; Sioutas, S.; Giannakis, K. Combinatorial GVNS (General Variable Neighborhood Search) Optimization for Dynamic Garbage Collection. Algorithms 2018, 11, 38. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Huang, Z. An improved noise quantum annealing method for TSP. Int. J. Theor. Phys. 2020, 59, 3737–3755. [Google Scholar] [CrossRef]
- Choi, V. Minor-embedding in adiabatic quantum computation: I. The parameter setting problem. Quantum Inf. Process. 2008, 7, 193–209. [Google Scholar] [CrossRef] [Green Version]
- Boothby, K.; Bunyk, P.; Raymond, J.; Roy, A. Next-generation topology of D-Wave quantum processors. arXiv 2020, arXiv:2003.00133. [Google Scholar]
- D-Wave. D-Wave QPU Architecture: Topologies. Available online: https://docs.dwavesys.com/docs/latest/c_gs_4.html#pegasus-couplers (accessed on 3 January 2022).
- Glover, F.; Kochenberger, G. A Tutorial on Formulating QUBO Models. arXiv 2018, arXiv:1811.11538. [Google Scholar]
- Silva, C.; Aguiar, A.; Lima, P.; Dutra, I. Mapping a logical representation of TSP to quantum annealing. Quantum Inf. Process. 2021, 20, 386. [Google Scholar] [CrossRef]
- Boros, E.; Hammer, P.L.; Tavares, G. Local search heuristics for quadratic unconstrained binary optimization (QUBO). J. Heuristics 2007, 13, 99–132. [Google Scholar] [CrossRef]
- Newell, G.F.; Montroll, E.W. On the theory of the Ising model of ferromagnetism. Rev. Mod. Phys. 1953, 25, 353. [Google Scholar] [CrossRef]
- Lucas, A. Ising formulations of many NP problems. Front. Phys. 2014, 2, 5. [Google Scholar] [CrossRef] [Green Version]
- Neukart, F.; Compostella, G.; Seidel, C.; Von Dollen, D.; Yarkoni, S.; Parney, B. Traffic flow optimization using a quantum annealer. Front. ICT 2017, 4, 29. [Google Scholar] [CrossRef]
- Filar, J.; Ejov, V. Flinders Hamiltonian Cycle Project. Available online: https://sites.flinders.edu.au/flinders-hamiltonian-cycle-project/graph-database/ (accessed on 3 January 2022).
- Meringer, M. Fast generation of regular graphs and construction of cages. J. Graph Theory 1999, 30, 137–146. [Google Scholar] [CrossRef]
- Shmoys, D.B.; Lenstra, J.; Kan, A.R.; Lawler, E.L. The Traveling Salesman Problem; John Wiley & Sons, Incorporated: Hoboken, NJ, USA, 1985; Volume 12. [Google Scholar]
- Bianchi, L.; Dorigo, M.; Gambardella, L.M.; Gutjahr, W.J. A survey on metaheuristics for stochastic combinatorial optimization. Nat. Comput. 2009, 8, 239–287. [Google Scholar] [CrossRef] [Green Version]
- Blum, C.; Roli, A. Metaheuristics in combinatorial optimization: Overview and conceptual comparison. ACM Comput. Surv. 2003, 35, 268–308. [Google Scholar] [CrossRef]
- Papalitsas, C.; Giannakis, K.; Andronikos, T.; Theotokis, D.; Sifaleras, A. Initialization methods for the TSP with Time Windows using Variable Neighborhood Search. In Proceedings of the 6th International Conference on Information, Intelligence, Systems and Applications (IISA 2015), Corfu, Greece, 6–8 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Papalitsas, C.; Andronikos, T. Unconventional GVNS for Solving the Garbage Collection Problem with Time Windows. Technologies 2019, 7, 61. [Google Scholar] [CrossRef] [Green Version]
- Papalitsas, C.; Andronikos, T.; Karakostas, P. Studying the Impact of Perturbation Methods on the Efficiency of GVNS for the ATSP. In Variable Neighborhood Search; Springer International Publishing: New York, NY, USA, 2019; pp. 287–302. [Google Scholar] [CrossRef]
- Papalitsas, C.; Karakostas, P.; Andronikos, T. A Performance Study of the Impact of Different Perturbation Methods on the Efficiency of GVNS for Solving TSP. Appl. Syst. Innov. 2019, 2, 31. [Google Scholar] [CrossRef] [Green Version]
- Gan, R.; Guo, Q.; Chang, H.; Yi, Y. Improved ant colony optimization algorithm for the traveling salesman problems. J. Syst. Eng. Electron. 2010, 21, 329–333. [Google Scholar] [CrossRef]
- Aono, M.; Zhu, L.; Hara, M. Amoeba-based neurocomputing for 8-city traveling salesman problem. Int. J. Unconv. Comput. 2011, 7, 463–480. [Google Scholar]
- Martoňák, R.; Santoro, G.E.; Tosatti, E. Quantum annealing of the traveling-salesman problem. Phys. Rev. E 2004, 70, 057701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Papalitsas, C.; Andronikos, T.; Giannakis, K.; Theocharopoulou, G.; Fanarioti, S. A QUBO Model for the Traveling Salesman Problem with Time Windows. Algorithms 2019, 12, 224. [Google Scholar] [CrossRef] [Green Version]
- Warren, R.H. Solving the traveling salesman problem on a quantum annealer. SN Appl. Sci. 2020, 2, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Qubovert. The One-Stop Package for Formulating, Simulating, and Solving Problems in Boolean and Spin Form. Available online: https://qubovert.readthedocs.io/en/latest/index.html (accessed on 3 January 2022).
- Han, J.; Kamber, M.; Pei, J. Data Preprocessing. In Data Mining, 3rd ed.; Han, J., Kamber, M., Pei, J., Eds.; The Morgan Kaufmann Series in Data Management Systems; Morgan Kaufmann: Burlington, MA, USA, 2012; pp. 83–124. [Google Scholar] [CrossRef]
- McGeoch, C.; Farré, P. The D-Wave Advantage System: An Overview; Technical Report; D-Wave Systems Inc.: Burnaby, BC, Canada, 2020. [Google Scholar]
- D-Wave Systems. Advantage_system1.1 Solver Decommissioned. 2021. Available online: https://docs.dwavesys.com/docs/latest/rn_feature_descriptions.html#advantage-system1-1-solver-decommissioned (accessed on 30 November 2021).
- McGeoch, C.; Farré, P. The Advantage System: Performance Update; Technical Report; D-Wave Systems Inc.: Burnaby, BC, Canada, 2021. [Google Scholar]
- Warren, R.H. Solving combinatorial problems by two DWave hybrid solvers: A case study of traveling salesman problems in the TSP Library. arXiv 2021, arXiv:2106.05948. [Google Scholar]
- Reinelt, G. TSPLIB—A Traveling Salesman Problem Library. ORSA J. Comput. 1991, 3, 376–384. [Google Scholar] [CrossRef]
- LeapHybridSampler. Available online: https://docs.ocean.dwavesys.com/projects/system/en/latest/reference/samplers.html#leaphybridsampler (accessed on 30 November 2021).
- Leap’s Hybrid Solvers Documentation. Available online: https://docs.ocean.dwavesys.com/en/latest/overview/hybrid.html#leap-s-hybrid-solvers (accessed on 30 November 2021).
- Leap’s Hybrid Solvers Documentation. Available online: https://docs.dwavesys.com/docs/latest/doc_leap_hybrid.html#id1 (accessed on 30 November 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Binary Variables: | |||
|---|---|---|---|
| Number of Constraints | |||
| Hamiltonian | Linear | Quadratic | Total |
| 0 | 0 | 0 | |
| 0 | |||
| Number of Binary Variables: | |||
|---|---|---|---|
| Number of Constraints | |||
| Hamiltonian | Linear | Quadratic | Total |
| 0 | |||
| 0 | |||
| Number of Constraints when | |||
|---|---|---|---|
| Hamiltonian | Linear | Quadratic | Total |
| Nodes | Solver | Runs | QAT (μs) | Qubits | Success Rate (%) |
|---|---|---|---|---|---|
| 6 | Advantage_system1.1 | 20 | 126,643.89 | 126.83 | 100.0 |
| 6 | Advantage_system4.1 | 20 | 140,461.42 | 120.27 | 100.0 |
| 8 | Advantage_system1.1 | 20 | 147,772.21 | 388.25 | 15.0 |
| 8 | Advantage_system4.1 | 20 | 160,148.34 | 372.60 | 35.0 |
| 10 | Advantage_system1.1 | 20 | 168,190.20 | 1010.20 | 0.0 |
| 10 | Advantage_system4.1 | 20 | 209,123.62 | 910.15 | 0.0 |
| 12 | Advantage_system1.1 | 20 | 170,374.85 | 2091.70 | 0.0 |
| 12 | Advantage_system4.1 | 20 | 243,015.98 | 1924.95 | 0.0 |
| 14 | Advantage_system1.1 | 20 | 188,910.52 | 3913.45 | 0.0 |
| 14 | Advantage_system4.1 | 20 | 272,583.67 | 3413.00 | 0.0 |
| Nodes | Solver | Runs | QAT (μs) | Qubits | Cost | Success Rate (%) |
|---|---|---|---|---|---|---|
| 14 | Advantage_system4.1 | 20 | 282,016.86 | 4145.25 | 4737.70 | 0.0 |
| Nodes | Solver | Runs | QAT (μs) | Run Time (μs) | Success Rate (%) |
|---|---|---|---|---|---|
| 6 | hybrid_binary_quadratic_model_version2 | 20 | 66,339.20 | 2,994,650.00 | 100.0 |
| 8 | hybrid_binary_quadratic_model_version2 | 20 | 64,866.25 | 2,992,684.90 | 100.0 |
| 10 | hybrid_binary_quadratic_model_version2 | 20 | 63,423.32 | 2,994,797.68 | 100.0 |
| 12 | hybrid_binary_quadratic_model_version2 | 20 | 49,859.00 | 3,003,757.63 | 100.0 |
| 14 | hybrid_binary_quadratic_model_version2 | 20 | 35,612.10 | 3,008,348.10 | 100.0 |
| Nodes | Solver | Runs | QAT (μs) | Run Time (μs) | Cost | Success Rate (%) |
|---|---|---|---|---|---|---|
| 17 | hybrid_binary_quadratic_model_version2 | 20 | 14,217.95 | 2,995,196.1 | 2417.15 | 100.0 |
| 21 | hybrid_binary_quadratic_model_version2 | 20 | 7181.00 | 3,003,955.9 | 3775.75 | 100.0 |
| 120 | hybrid_binary_quadratic_model_version2 | 5 | 107,764.40 | 75,028,024.6 | 25,871.20 | 100.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stogiannos, E.; Papalitsas, C.; Andronikos, T. Experimental Analysis of Quantum Annealers and Hybrid Solvers Using Benchmark Optimization Problems. Mathematics 2022, 10, 1294. https://doi.org/10.3390/math10081294
Stogiannos E, Papalitsas C, Andronikos T. Experimental Analysis of Quantum Annealers and Hybrid Solvers Using Benchmark Optimization Problems. Mathematics. 2022; 10(8):1294. https://doi.org/10.3390/math10081294
Chicago/Turabian StyleStogiannos, Evangelos, Christos Papalitsas, and Theodore Andronikos. 2022. "Experimental Analysis of Quantum Annealers and Hybrid Solvers Using Benchmark Optimization Problems" Mathematics 10, no. 8: 1294. https://doi.org/10.3390/math10081294