Abstract
In this paper, the impact of one of the challenges of the power transmission system, namely three-phase short-circuits, on the stability of the system is discussed. This fault causes the speed change of the synchronous generators, and the control system needs to quickly zero this speed difference. This paper introduces a completely new and innovative method for power system stabilizer design. In the proposed method, there is a PID controller with a type-2 fuzzy compensator whose optimal parameter values are obtained using an improved virus colony search (VCS) algorithm at any time. In the simulation section, both transient short-circuits (timely operation of breakers and protection relays) and permanent short-circuits (failure of breakers and protection relays) are applied. For transient short-circuits, the three control systems of type-1 fuzzy-PID, type-2 fuzzy-PID, and optimized type-2 fuzzy-PID based on VCS for the nominal load and heavy load modes were compared in the simulations. Apart from the three control systems mentioned earlier, the response of a standalone PID controller was also evaluated in the context of the permanent short-circuit mode. According to the simulation results, the proposed method demonstrates superior performance and high efficiency. In contrast, the standalone PID exhibits divergence.
Keywords:
power system stabilization; type-2 fuzzy; evolutionary algorithm; short-circuit; self-tuning PID MSC:
93-08
1. Introduction
Power system stability has been an important issue for reliable system performance since the 1920s. Many cases of large blackouts due to system instability show the importance of this phenomenon. Although this is an old issue, with the growth and development of interconnected systems, the use of new controls to improve operation in normal and emergency situations has made the issue of sustainability a greater concern than ever before [1,2,3,4,5,6,7,8]. One type of stability is small perturbation rotor angle stability, which is related to a system’s ability to maintain synchronism under small perturbations. As a result of significant advancements in systems theory and control, new methods for designing controllers are being proposed, such as those based on adaptive control, robust control, and intelligent control [9,10,11,12,13,14,15,16].
Classical optimization and intelligence-based optimization are well-known methodologies. Classical control theory was used to create the old stabilizers. In classical control strategy, the design of the system stabilizer uses power, velocity, and frequency as the control signal alone or to control the output of multiple components for the output of the generator. In the classical approach, a linearized model is typically utilized based on a given operating point, assuming that the system’s exact model is known and its parameters remain constant [17,18,19,20,21]. Given that one of the salient features of a system is the variable power of loading, producing, consuming and modifying the system, when the operating point of the system varies, using classical controllers with fixed parameters can improve the system’s performance [22,23,24,25,26].
The application of intelligent procedures in the control of complex and nonlinear systems in the last decade has become more and more widely used in several fields of technology. Occasionally, the complexity of such issues arises from the practical and realistic nature of the objective function or the model restrictions. Traditional optimization techniques involve derivative-based processes. These methods are robust and proven to be effective in solving a variety of optimization problems. Using a particle community algorithm, in [8], the authors conducted a comparison between a classical power system stabilizer and a fuzzy stabilizer regarding a multi-machine system. Furthermore, a proposed algorithm was employed to configure the parameters of the classical controller and the membership functions of the fuzzy system [27,28,29,30].
Reference [31] introduced a method that utilizes a neural network with radial basis functions for the real-time adjustment of stabilization parameters in a traditional power system. This method is based on the orthogonal learning algorithm with least squares error. The primary function of this model is to aggregate the inputs and generate an output accordingly. In [32], efforts were made with FACTS devices to increase transmittance and reduce frequency oscillations. This article acknowledges that due to the inconsistency of these devices, it is not possible to achieve the accepted legacy. For this reason, dynamic stability based on the feedback matrix has been used to address this shortcoming for nonlinear systems with high operating conditions. In a multifunctional design, stabilizers for the multimachine power system are presented using the particle community optimization algorithm. In order to transfer unstable electromechanical modes with poor attenuation to a specific area of the mixing plane, the stabilizer parameters are adjusted simultaneously [33,34,35].
In [36], the synchronous parameter configuration of stabilizers with a genetic algorithm in a multi-machine power system with a solution of a set of inequalities is presented, expressing the objectives of the optimization problem. A set of specified operating conditions for the real power system is presented for simultaneous adjustment of the stabilizers with a genetic algorithm. For a set of operating conditions, a simultaneous configuration of the fixed stabilizer parameters and the genetic algorithm is presented in [37]. The results show that the accuracy, precision, and expert input function of the power system are very important in the optimization process design stages, and sometimes it is necessary to choose the best solution from the many results obtained from the algorithm. In addition to the genetic algorithm, other intelligent optimization methods such as evolutionary programming, prohibited search, the metal annealing process, and the bacterial feeding method have been used to optimize PSS parameters.
In reference [38], the QPSO algorithm is utilized, which requires fewer parameters than PSO, exhibits greater efficacy, and produces superior outcomes compared to PSO. In [39], the configuration of the proportional, integral, and derivative controller parameters with a hybrid algorithm is proposed. This innovation in the weight of the system response parameters includes maximum transcendence, sitting time, and rising time. In addition, reference [28] proposes a power system stabilizer that employs a fuzzy controller. With the help of linearized feedback, a fuzzy detection system was employed for the nonlinear structure of the synchronous machine. The particle community algorithm was used to investigate the stability of the power system using fuzzy structure modification [40]. Although the proposed method had shown good performance in quenching fluctuations, it was not able to resist larger disorders. Additionally, examining robustness against model errors and external disturbances is an important criterion that can be used to obtain better results. Various methods to achieve this goal are described in [41,42,43,44,45].
This paper introduces an enhanced virus colony search algorithm to overcome this limitation. In the proposed method, chaos theory is used, which is one of the main highlights. The proposed method possesses several significant advantages over other comparable optimization techniques, which will be elaborated upon later in the article. The novelties of the article are as follows:
- A.
- An independent PID fuzzy controller is proposed using a developed virus colony search algorithm that can adapt to different system structures and operating conditions;
- B.
- In order to reduce computation time, the fuzzy controller parameters are adjusted in several phases, including: (1) adjusting the coefficients and membership functions, (2) adjusting the weight coefficients of rules, and (3) adjusting the fuzzy rules;
- C.
- A multi-machine model with nonlinear parameters is used to approximate the behavior of the real system being studied;
- D.
- The proposed controller’s performance is compared with other available methods in different working conditions.
2. Studying the Problem from a Mathematical Perspective
2.1. Multi-Machine Nonlinear Modeling
An algebraic–differential equation model of a power system describes a single machine derived from a model of generators that connect data to other systems. In this work, a power system generator with a two-axis model is used for night-time optimization in the time domain, the equations of which are expressed as follows:
All parameters are explained in Table A1 in Appendix A.
For a system powered by synchronous machines or generators, the acceptability criterion for operation is that all the machines must remain synchronized with each other. The per-unit-based multi-machine mechanical equations can be expressed as follows:
where , are the inertia and mechanical torque of the ith machine, respectively, while is the electrical torque of the ith machine.
2.2. Type-2 Fuzzy—PID
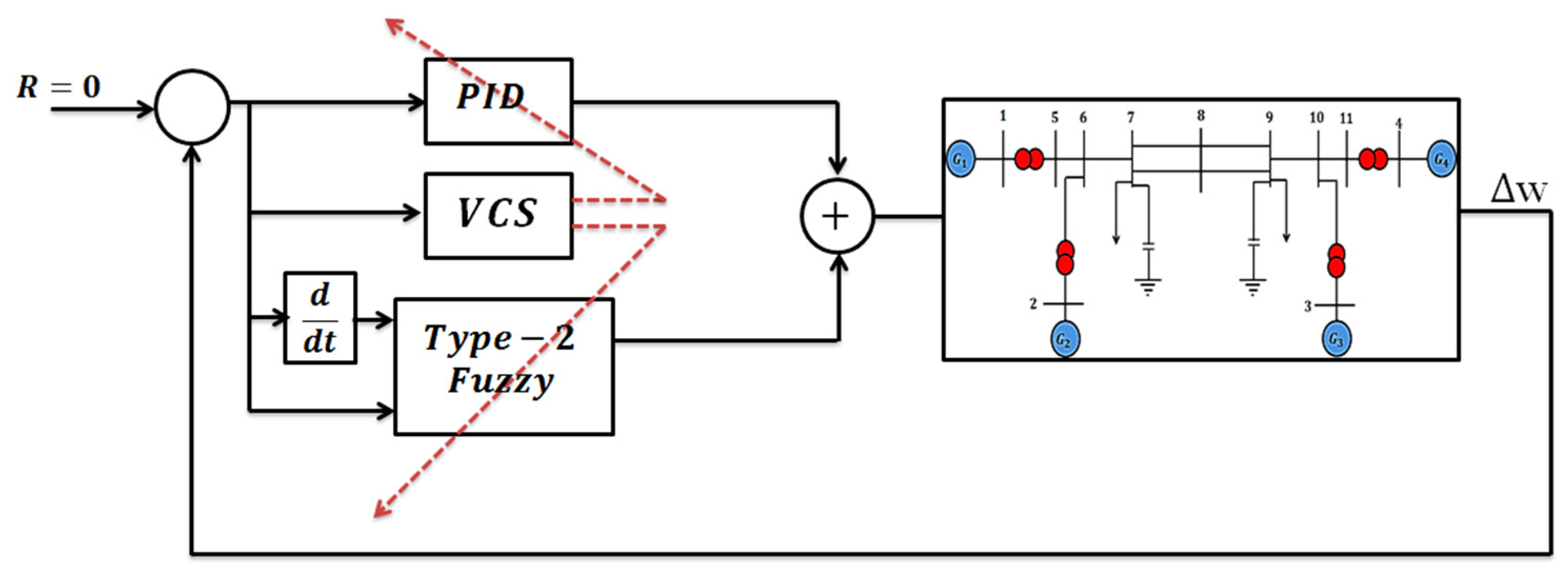
Fuzzy controllers have been used to improve power system stability and mitigate the issues associated with classical controllers when operating under various conditions. In many projects, fuzzy controllers that are based on the PID configuration have been introduced as efficient controllers. For low-frequency stability, a fuzzy PID controller of type 2 is presented in this section. The proposed type-2 fuzzy PID controller adjusts the coefficients according to the fuzzy region in the proposed controlling strategy. An improved controlled performance can be achieved by using an algorithm based on virus colony search (VCS), which exhibits a high convergence rate and performs well in optimizing nonlinear functions, and optimizing its parameters over several stages, including coefficients, membership functions, weight coefficients of rules, and type-2 fuzzy rules. As shown in Figure 1, the common controller is the first layer, and the fuzzy zone systems are the second layer; these control the performance of the conventional controller. This proposed system combines a conventional PID controller with a real-time type-2 fuzzy system to determine the PID benefits. Depending on the operating conditions, type-2 fuzzy systems use a set of if–then fuzzy rules to select PID gains.
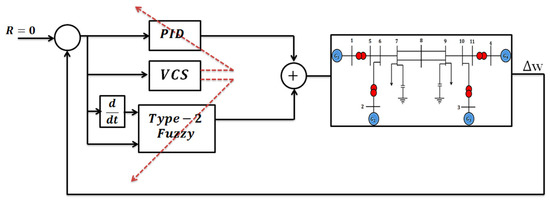
Figure 1.
Proposed control system scheme.
For further explanation, suppose one can use the limits Kp min ≤ Kp ≤ Kp max, KI min ≤ KI ≤ KI max, and KD min ≤ KD ≤ KD max for the proportional and derivative interest. As a result, these coefficients are normalized according to the following equations to explain the variables better in the smaller range as well as to evade probable distinctions between them:
Consider a fuzzy system with inputs and so that it has two fuzzy systems, one input and one output, that determine the parameters. The design of an appropriate controller takes a lot of time in traditional design methods, as the designs are based on expert knowledge, which is found through trial and error. In this paper, fuzzy controllers are also optimized using an improved virus colony search algorithm. Fuzzy PD controllers are designed to speed up a system’s response and reduce the maximum ultrasonic value as well as eliminate steady-state integral errors. By combining these two types of controllers with a fuzzy switch, it is possible to achieve all the properties of both integral and PD controllers.
3. Improved Virus Colony Search Algorithm
3.1. The Standard Virus Colony Search Algorithm
The VCS algorithm is a population-based optimization technique that operates on a population of viruses and host cells. It is based on the virus’s behavior of infecting the host cell and either reproducing or spreading. Given that the proposed mathematical basis is required for the proposed extended model, this section describes its complete mathematical formulation.
- A.
- Virus Spread
In nature, viruses are found in various environments, including air and water. The VCS algorithm is designed to mimic the movement and behavior of viruses, with the algorithm functioning as a “walker” and the host cell represented by a matrix. The Gaussian walking technique is an effective approach for simulating this behavior and preventing the algorithm from getting trapped in local optima. This method is formulated by the following expression:
The equation above involves the random selection index i, which is chosen from the set {1, 2, …, N}, with N representing the total population. denotes the best solution obtained in the -th iteration, while and are random variables between 0 and 1. To determine the standard deviation for the Gaussian parameter, the following relationship is utilized: . The purpose of the vector direction formula is to prevent the algorithm from getting stuck in local minima, where represents the safest place in the whole population.
Additionally, in order to improve local search results, is invoked. This coefficient has a greater number of variations in the initial iterations, which progressively leads to a lesser oscillation direction as repeating of the program increases and leads to a better response and creates the final result. also ensures the production of beneficial answers established on guidance, where the final answer is oriented with the vector .
- B.
- Vulnerability of the Host Cell
Cells become infected when the virus damages their internal structures, and eventually this leads to cell death. The CMA-ES model can be used to model this behavior based on the covariance matrix as follows:
Step 1: Update :
where is a normal distribution that has a mean of 0, is the covariance matrix through dimensions , is the current iteration of the program, is the dimension of the problem, and . is stated by the initial amount:
Step 2: Based on the best γ vector from the prior part, the parent vector is considered with the following centrality:
In the previous relation, γ = [N/2], is the composition coefficient and the index signifies the best answer in the set of answers. Accordingly, we have two evolutionary routes based on the following relations:
where is symmetrical, positive, and establishes the condition . The computational parameters are regularly accustomed to and and . Of course, if , then is a large amount.
Step 3: Update the size and the covariance matrix with:
where is commonly near unity and , where acts according to:
- C.
- Performance of the Safety System
The body’s safety system performs as given below:
Step 1: Taking into account the objective function of the system being analyzed, calculate the performance criterion for the population:
where:
N: total population of
: the average of the target function in ith population of .
Step 2: From the population, grow each population separately with:
where the indices k, i, and h are randomly chosen from the set [1, 2, 3, …, N], to be of the kind that i h k. Other parameters such as and are random numbers in .
The above equations demonstrate that each solution attempts to retain its best value in the current step. Additionally, if a solution goes beyond its upper or lower bounds, it is re-generated within these limits according to:
3.2. Proposed Improved Algorithm
To upgrade the performance of the clone virus search algorithm, in this section, a general and local search model is proposed as an extension. The subsequent sections describe the developed model proposed in this study:
- Initial Production
Step 1: Initialize the initial parameters , , for , where is the number of iterations needed to achieve the subregion. The number of scanning steps in the n-D space of the final search algorithm is . The is a value of a random variable in the range [0, 1].
- Chaos Theory
Step 2: For the range , chaos theory is exploited for generating updated solutions . In this regard, to produce the solutions, the following loop is utilized:
where and are the outputs of this second step.
Step 3:
Step 4:
A chaos formula is used to generate the variable . This equation can be formulated as follows according to the law of turbulence:
In the above equation, represents the turbulent particles in the dimension j and the repetition of i. Ng is the number of variables defined for optimization. The number of variables is defined for optimization. Notably, this coefficient, given the value obtained in the previous step, results in creating a turbulence coefficient for the next step.
Step 5: In order to meet condition , repeat the previous steps. In the previous steps, the search space is transformed into a better sub-space , which are and .
Local search under a better space:
Step 6: For a constant value of c, we have j =1, 2, …, n
where and are the outputs of the preceding step.
Step 7: if , then the optimum solution is attained in the established model.
4. Design Controller Application of the Proposed Algorithm
This section aims to present the design of a fuzzy controller that is based on an extended version of the virus colony algorithm model. The intended design can be achieved by following the steps outlined below:
Step 1: a number of primary data factors such as system information, constraints, generators and related systems information, bus information, and more should be sorted.
Step 2: establish the basic factors of the suggested algorithm, consisting of the population number, the number of program iterations, the number of host cells, the Gaussian function coefficient for causing damage to the host cell, and the call system information and restrictions on system data.
Step 3: generate new responses in the search space using the proposed advanced model.
Step 4: A function of time domain is used to determine the optimal configuration of proposed control system parameters:
In the above equation, is the simulation time for the optimization process, ∆ω is the changes in speed, is the number of operating points of the system, and is the number of generators. The objective of this function is to minimize overshoot, undershoot, and settling time.
In this paper, the PID structure is combined with the type-2 fuzzy system controller. Depending on the shape of the control signal, we have:
The developed controller design is presented as a constrained optimization problem with the following parameters:
In addition to the type-2 fuzzy system parameters, the PID metrics are used as optimization variables in the suggested algorithm. In order to solve the problem of nonlinear constrained optimization, the proposed improved algorithm is used.
Step 5: In order to upgrade to the next generation, choose the best solution and store it in memory. Note that this set of solutions has been changed by the initial answers.
Step 6: calculate the suitability and current solutions, and select the best solution using the objective function introduced in Equation (26).
Step 7: The best solution should be compared with that saved in memory. This solution will be replaced if it is better than that memorized, otherwise it will remain the same.
Step 8: perform similar operations to step four built on the chaos equation, and upgrade the answers.
Step 9: the worst-received answers should be substituted with new random answers, and the best answer should be found using chaotic search.
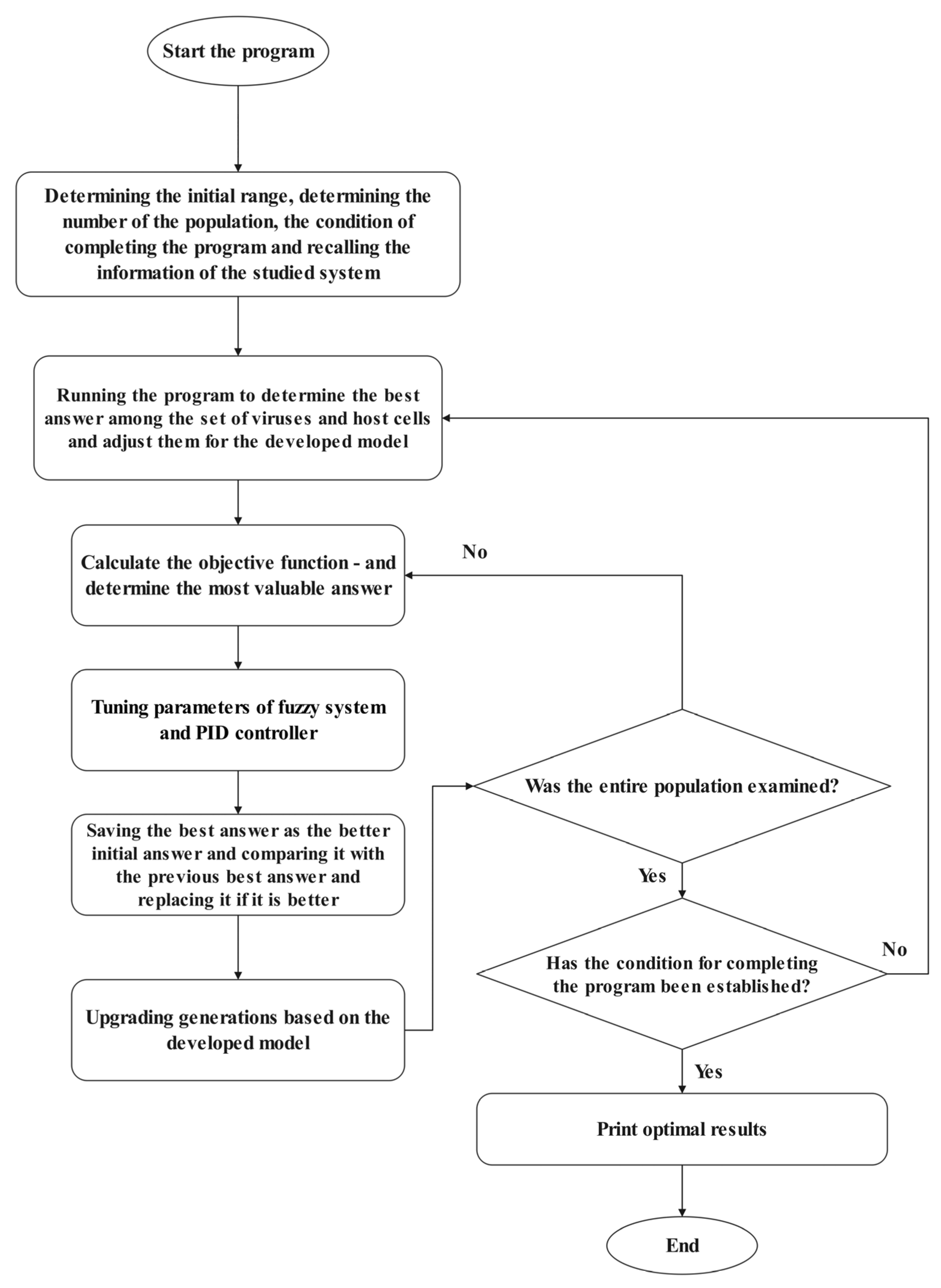
Step 10: A list of the optimal answers is displayed if the final condition is presented; otherwise, refer to step 4. Figure 2 shows the flowchart of the different steps of the proposed method.
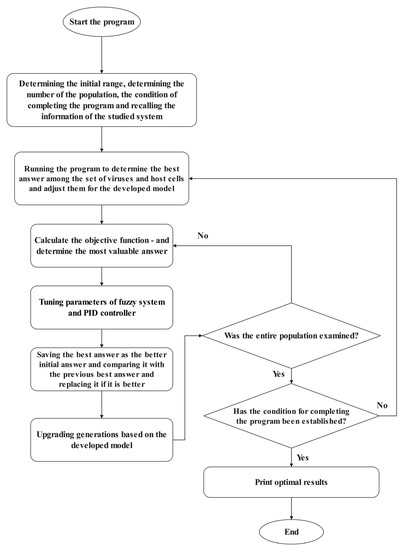
Figure 2.
Flowchart of different steps of the proposed method.
5. Simulation Results
5.1. Simulation Results in Four-Machine System
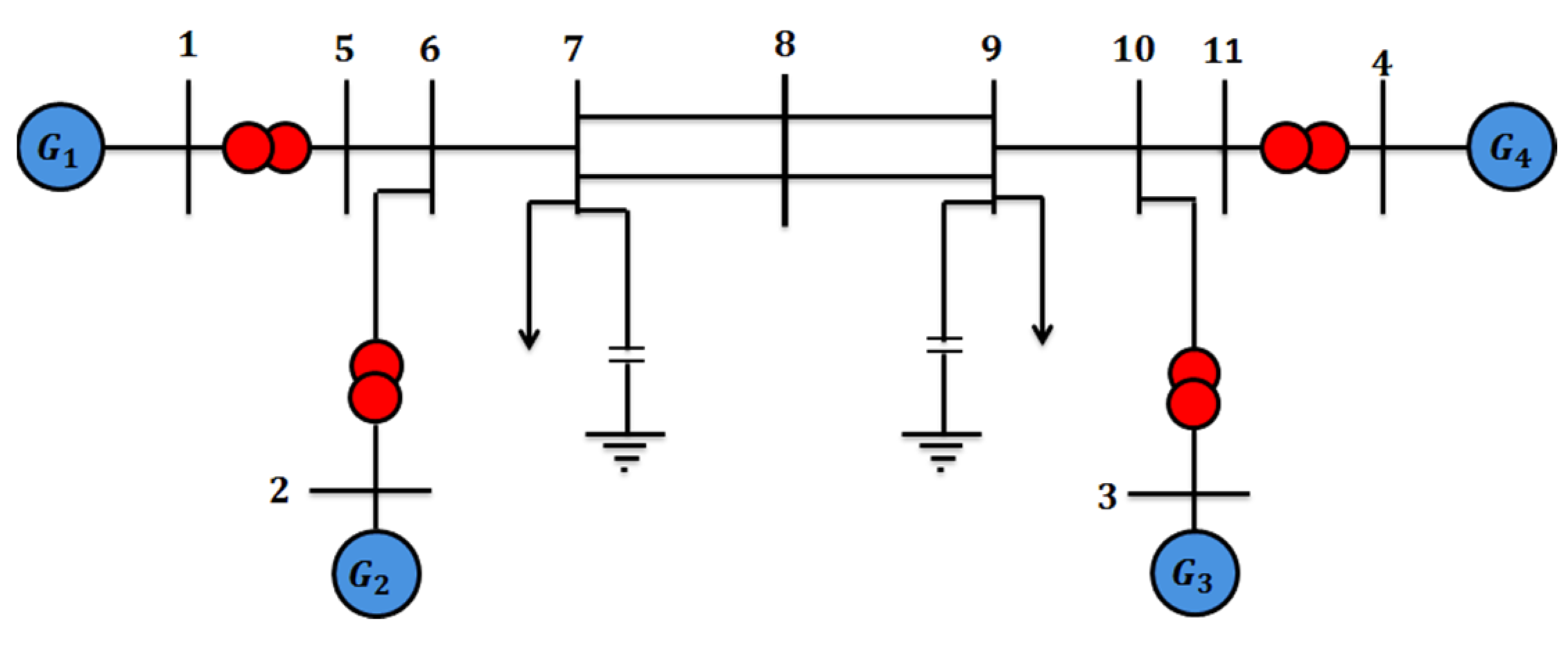
In this subsection, we evaluate the performance of the proposed algorithm in optimizing the design of the proposed controller. The performance of the proposed method in distinct scenarios is studied by considering different working conditions. In this section, a power system with four machines and two areas is considered. The reason for choosing a safe system is the presence of interregional fluctuations, as a lot of research studies focus on investigating fluctuations. The studied system is connected by two 220 kV lines. Also in each area are two generators of 900 MVA and 20 kV. The inertia constant is 1 s in the first region and 6.175 s in the second region, and 413 MW is provided from the first zone to the second zone through transmission lines. Additionally, due to the increase in impedance load from the transmission line to about 140 MW, the system is available. Figure 3 shows the four-machine system with two areas. The left area includes the generators 1 and 2 as well as buses 1, 2, 5, 6, and 7, and the right area includes the generators 3 and 4, as well as buses 3, 4, 9, 10, and 11.
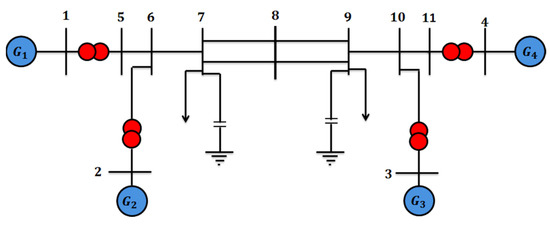
Figure 3.
The four-machine system with two areas.
A fuzzy-PID controller of type 2 is designed based on the active power (P) and reactive power (Q) of the generators and load points. Consideration is given to the following operating conditions:
- (A)
- Transient short-circuit with nominal load;
- (B)
- Transient short-circuit with increasing the load by 25%, that is, a heavy load;
- (C)
- Permanent short-circuit with nominal load (failure of breakers and protection relays).
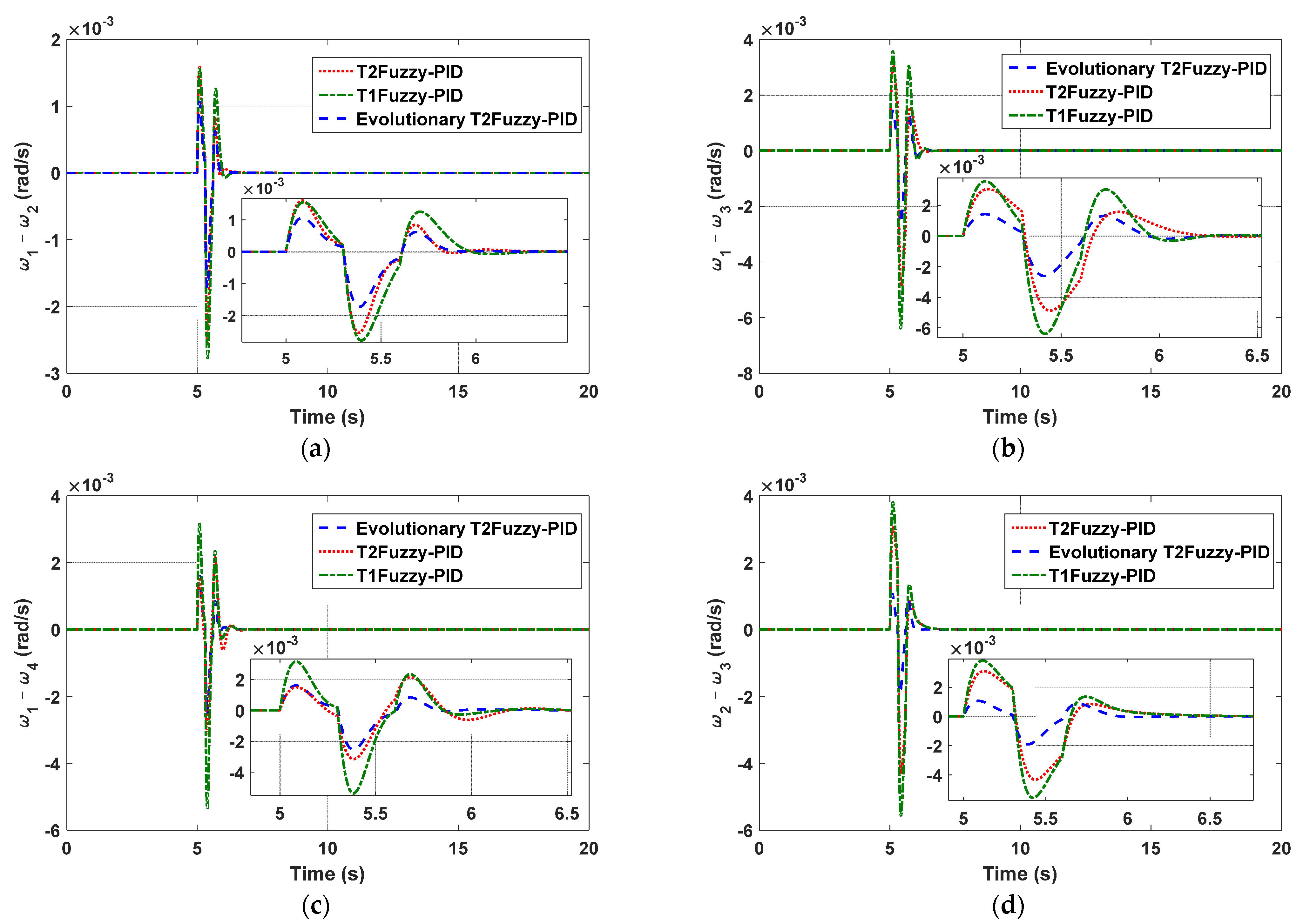
For the purpose of comparing performance, the following three aspects were taken into consideration: type-1 fuzzy-PID, type-2 fuzzy-PID without the evolutionary algorithm, and finally type-2 fuzzy-PID with the evolutionary algorithm. Figure 4a–f show the speed differences between the generators considering the above three controllers. The occurrence of a three-phase short-circuit in bus 8 at the moment of t = 5 s for a period of 0.1 s was tested. As seen in the figure, the proposed approach has the beneficial capability of decreasing settling time, and the amount of bruising and lowering also decreased dramatically.
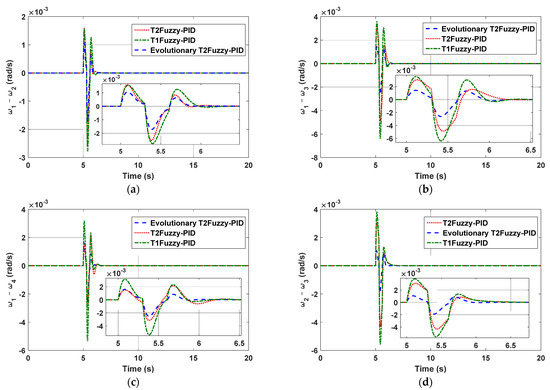
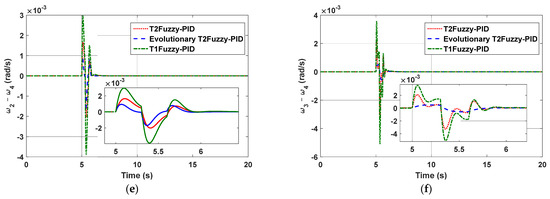
Figure 4.
Speed differences of each generator with each other generator with the occurrence of transient short-circuit faults in nominal load mode. (a) The speed difference of generator 1 and 2. (b) The speed difference of generator 1 and 3. (c) The speed difference of generator 1 and 4. (d) The speed difference of generator 1 and 5. (e) The speed difference of generator 1 and 6. (f) The speed difference of generator 1 and 7.
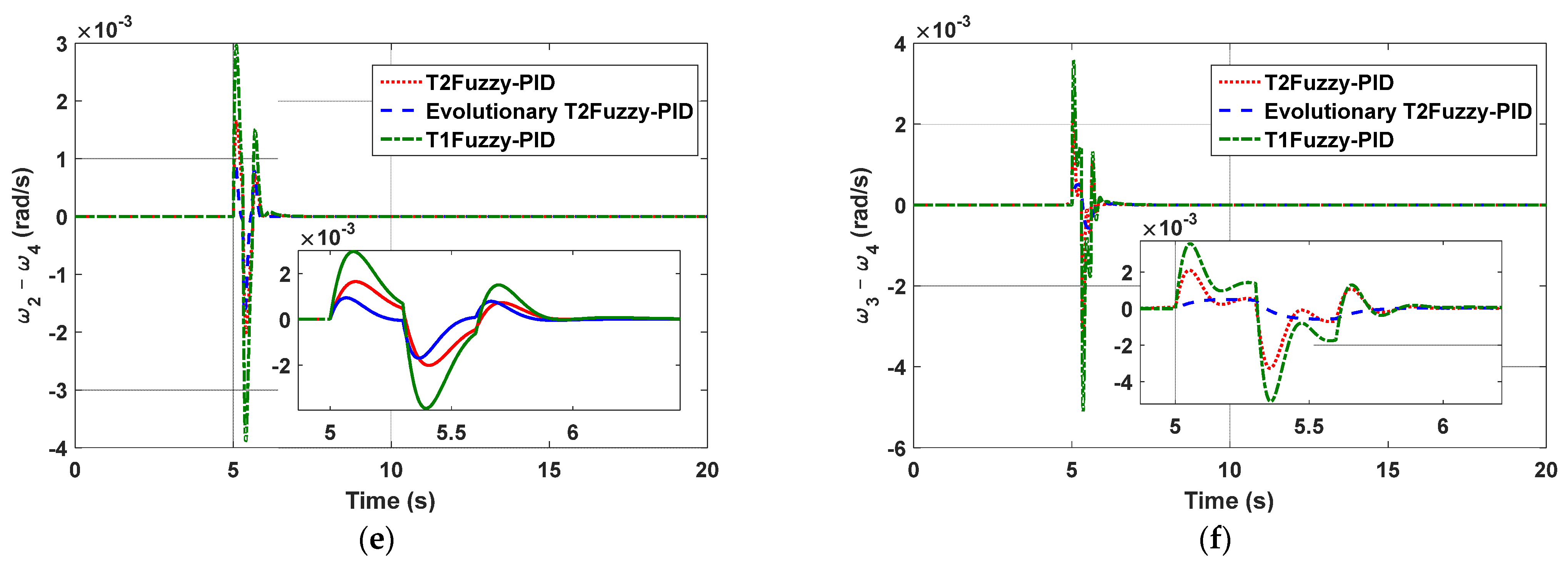
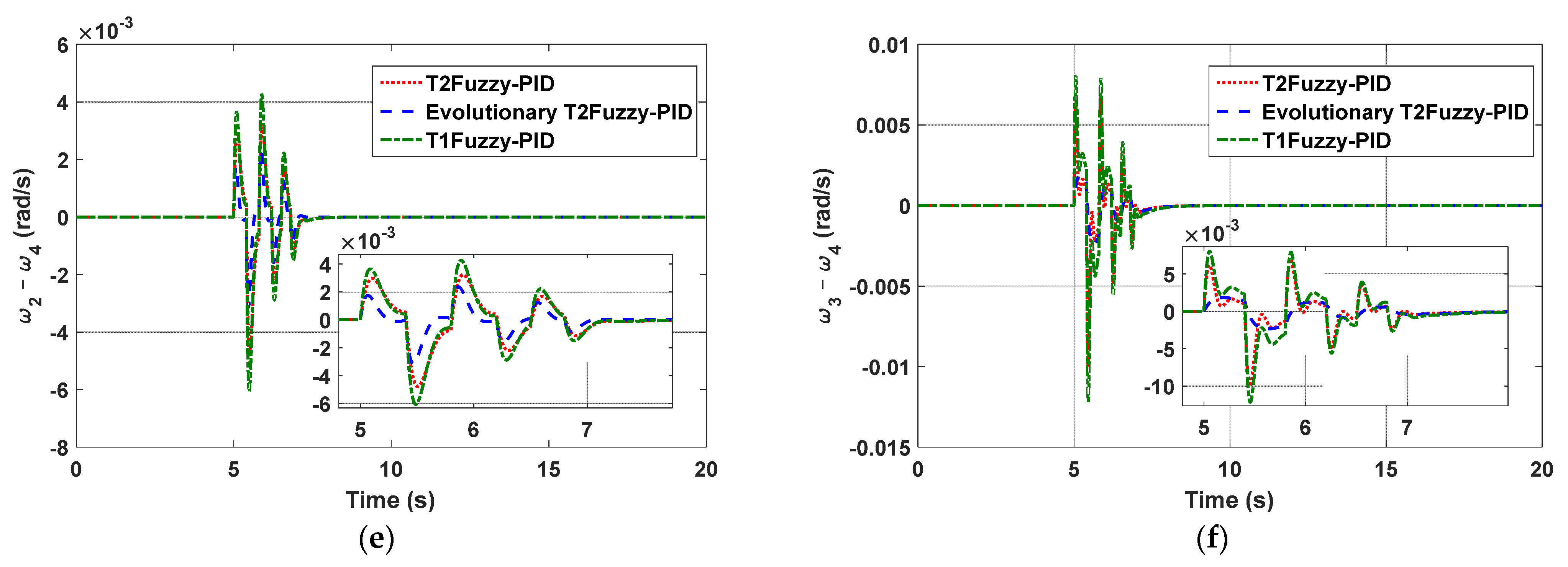
As can be seen in Figure 5a–f, all three controllers were able to zero the difference in speed of the generators after 1 s from the moment of the fault. During this 1 s, the difference in oscillation in speed between the generators with the evolutionary T2Fuzzy-PID method is much less than that of the other two methods, especially in the last plot (the speed difference between the generators 3 and 4), where this issue is clearly evident. After our proposed method, the T2_Fuzzy-PID method has a better performance than the T1_Fuzzy-PID method, which is due to the fact that there are more parameters in the type-2 fuzzy system (and therefore higher accuracy).
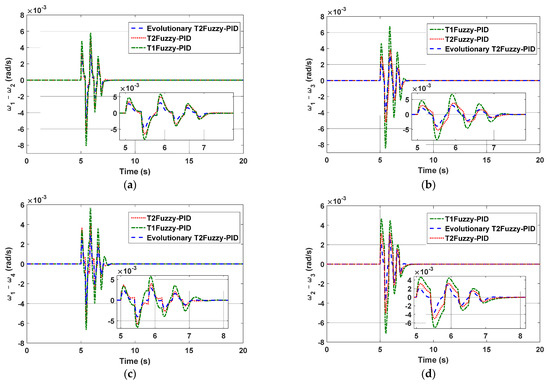
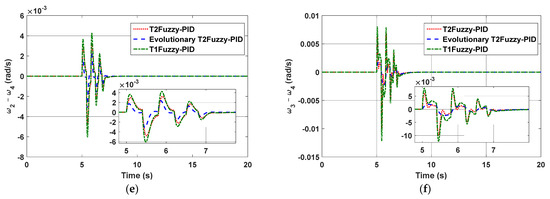
Figure 5.
Changes in the output speed of generators by applying a three-phase fault in heavy loading conditions. (a) The speed difference of generator 1 and 2. (b) The speed difference of generator 1 and 3. (c) The speed difference of generator 1 and 4. (d) The speed difference of generator 1 and 5. (e) The speed difference of generator 1 and 6. (f) The speed difference of generator 1 and 7.
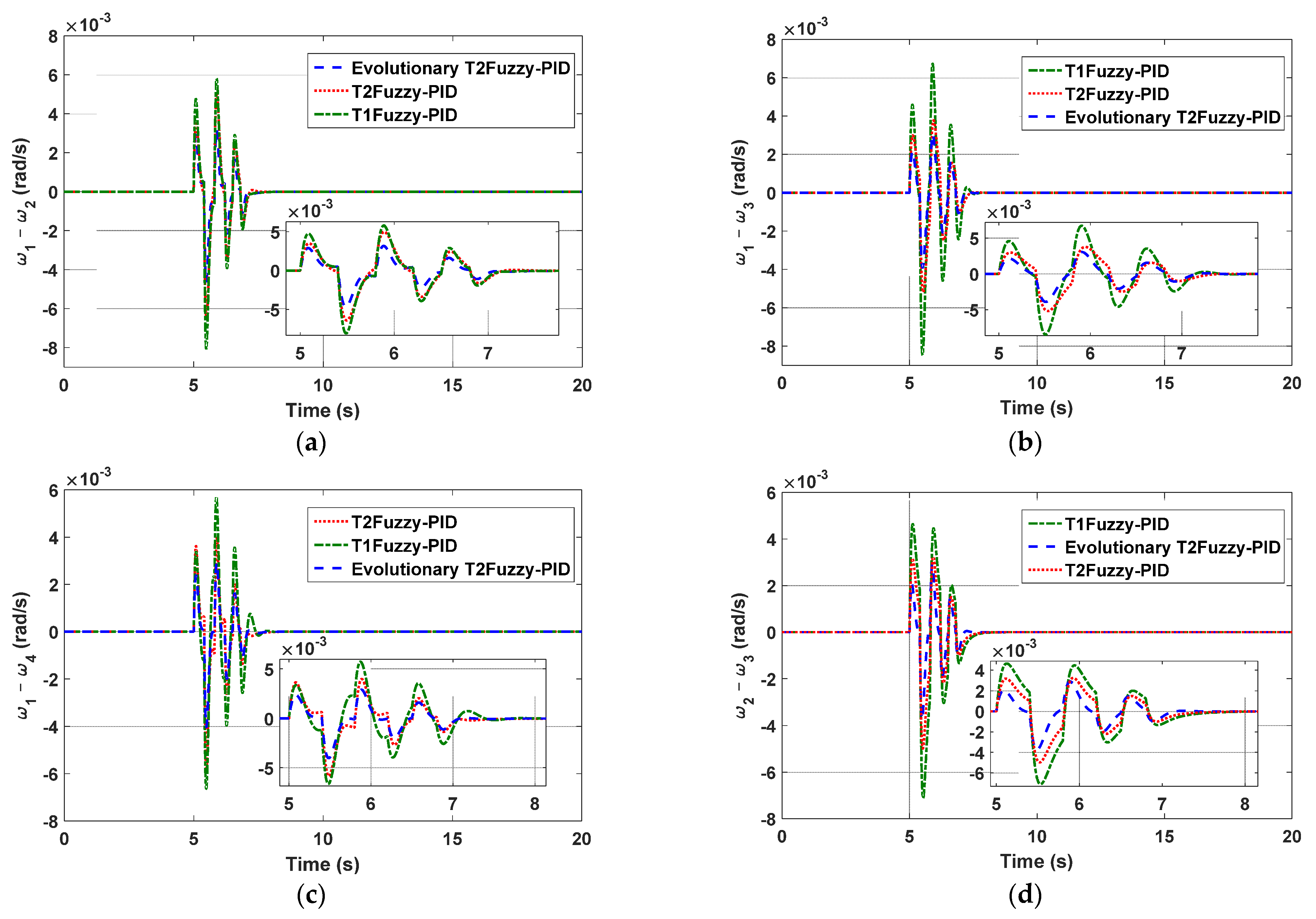
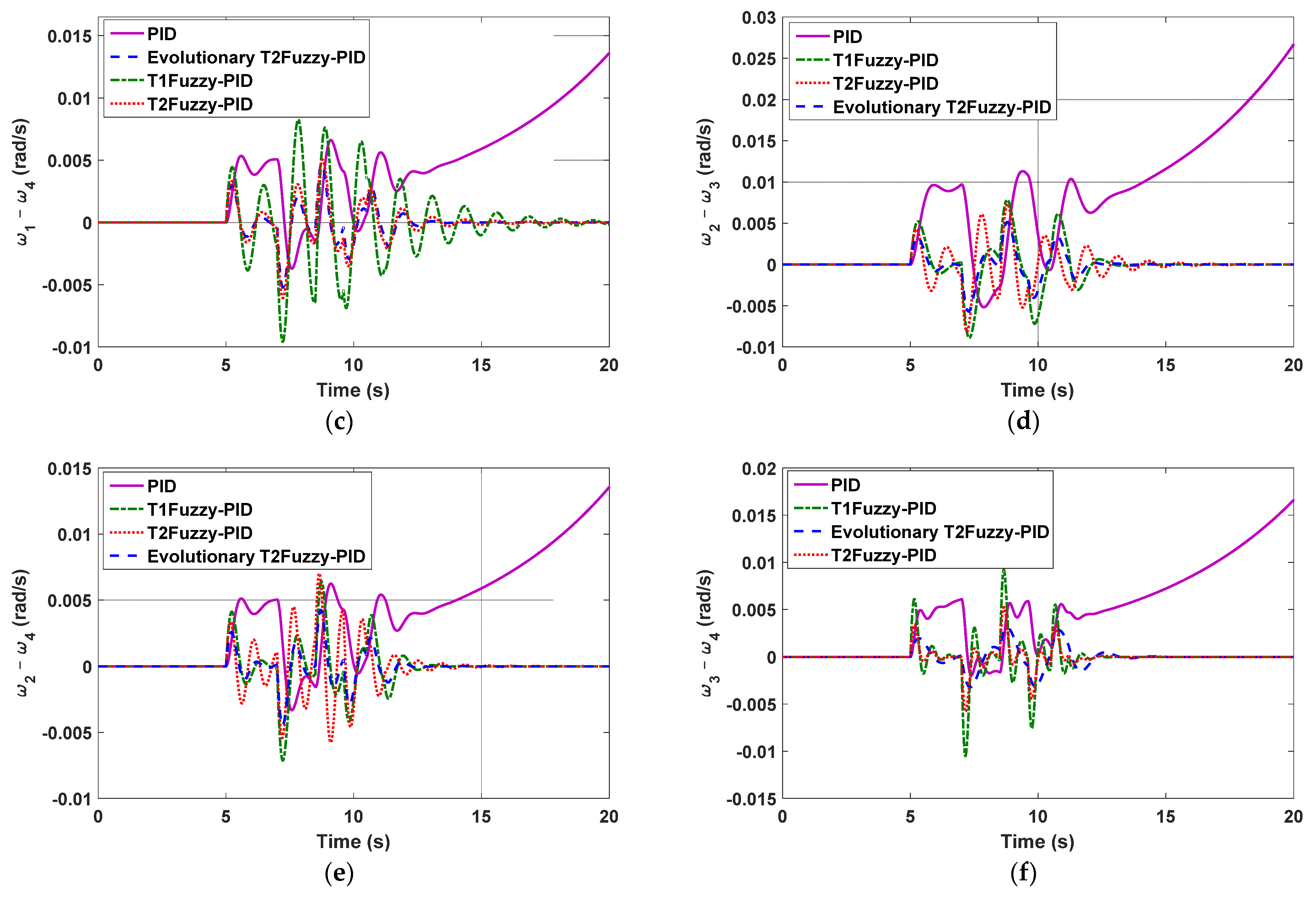
An increase in load occurs abundantly in a power system. This can be a challenge for the power system and its controller. In the event of an increase in load, the frequency of the power system decreases, and the control system must compensate by increasing the speed of the generators. For the scenario of hard-working conditions, we created a 25% increase in load for each area; there was also a three-phase error between the two regions. Applied to the upper line (bus 8) between the two areas, this error leaves it out of circuit. The occurrence of a three-phase short-circuit in this bus at the moment of t = 5 s for a duration of 0.1 s was tested. Using the controller in question, the system operation is shown in Figure 6. In Figure 4a–f and Figure 5a–f, after 0.1 s, the breaker operates and disconnects the faulty line, but in Figure 6a–f, it is assumed that the breaker does not operate at all (for any reason). In such a situation, a controller with fixed coefficients cannot keep up with the changes (because it is not adaptive). We also know that if the breaker does not work, the operating point of the system is constantly changed.
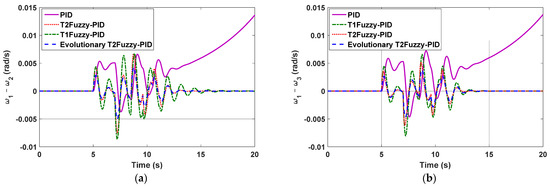
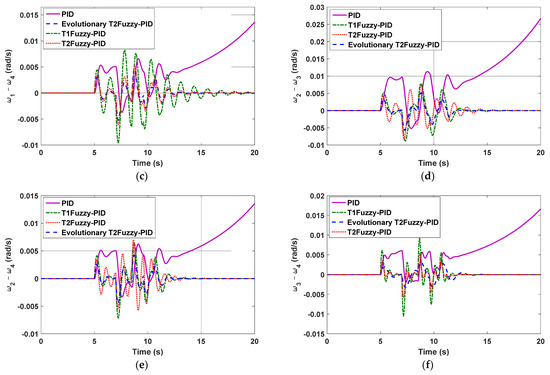
Figure 6.
Changes in the output speed of generators applying a permanent three-phase fault in nominal loading conditions. (a) The speed difference of generator 1 and 2. (b) The speed difference of generator 1 and 3. (c) The speed difference of generator 1 and 4. (d) The speed difference of generator 1 and 5. (e) The speed difference of generator 1 and 6. (f) The speed difference of generator 1 and 7.
The proposed method performed better than the other methods despite such difficult working conditions. Overload, in addition to increasing the amplitude of the oscillations, led to an increase in the oscillation time (about 2 s). Since all three controllers are adaptive and can adapt to the conditions of the power system, all three controllers performed reasonably well even in overload conditions. It is further assumed that the fault persists in the power system and that the protection relays are not functional.
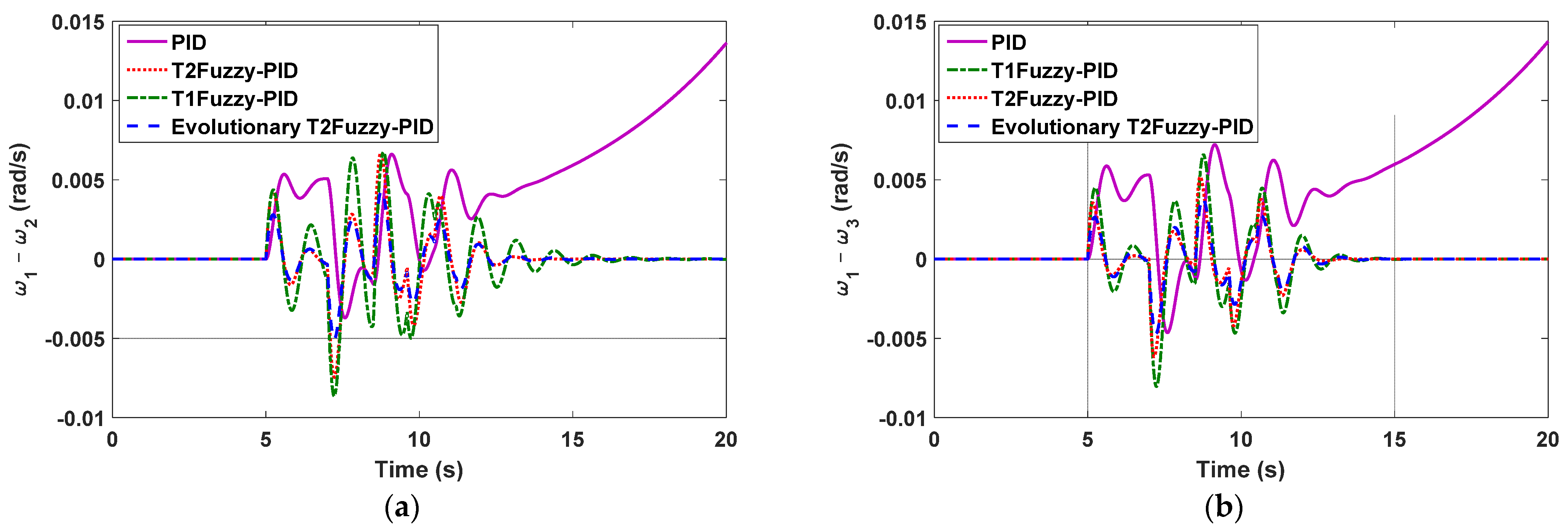
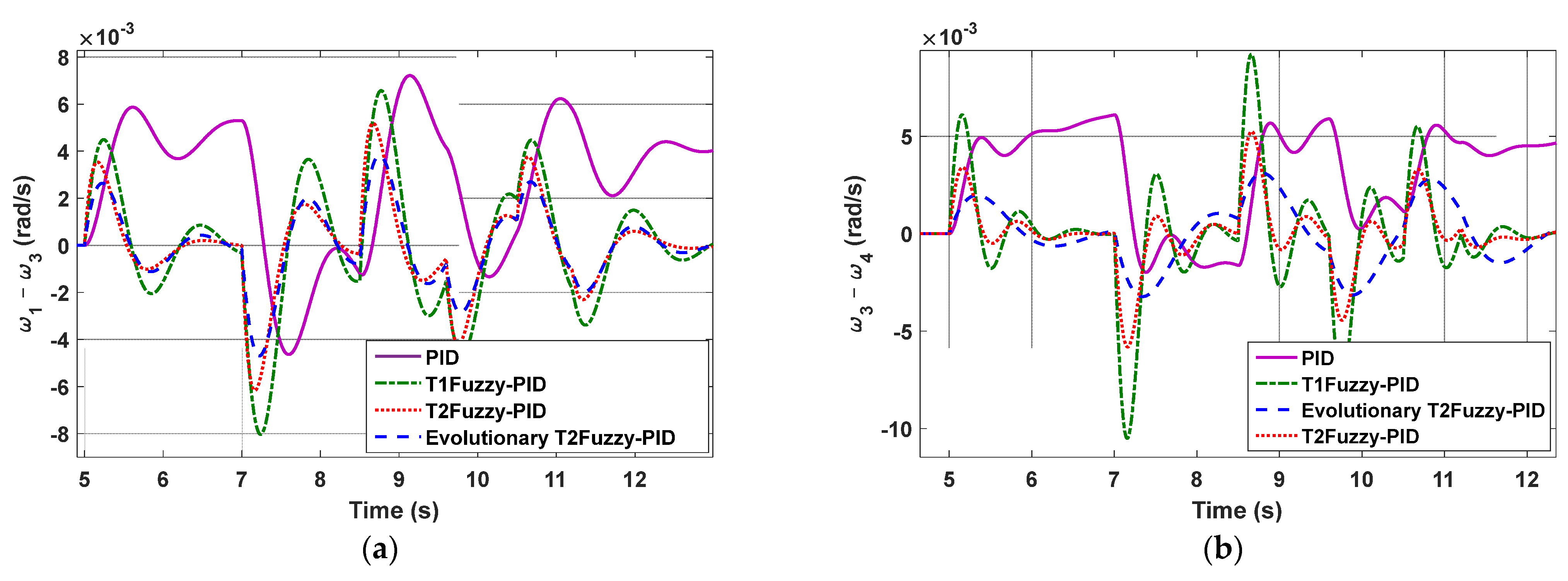
In Figure 5a–f and Figure 6a–f, after 0.1 s, the protection relays operated and removed the faulty line, but in Figure 6, it is assumed that the relay does not operate, and the line does not exit. However, all three controllers were able to increase the rotation speed of the generators to zero by increasing their power. As shown in Figure 6a,b, a traditional PID controller was added to this scenario to highlight the performance of adaptive control systems. The PID control system is not capable of tolerating faults, and it diverged. For greater clarity, the speed differences between generators 1 and 3 as well as generators 3 and 4 are magnified and shown in Figure 7.
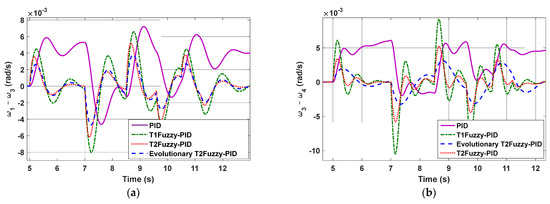
Figure 7.
Two zoomed-in plots of Figure 6. (a) The speed difference of generator 1 and 2. (b) The speed difference of generator 1 and 3.
The simulation results of the proposed technique were compared with those of other methods based on numerical criteria. The following two criteria, FD (Figure of Demerit) and ITAE (Integral of the Time multiplied by Absolute value of the Error), were used for the comparison:
In the above relations, OS is the response peak point, US is the first negative response peak point, and is the response session time that was calculated with the criterion of 2%. Table 1 displays the numerical results of FD and ITAE for six different control methods. If the breaker does not work, the PID controller is unstable, and its steady state error becomes infinite (see Figure 6). However, in order to complete Table 1, it is assumed that the breaker operates after 0.1 s and disconnects the faulty line. In addition, the simulation conditions of all methods were completely the same, and the simulations were performed by one person using a single computer. Additionally, the steady-state error always exists in a very small amount and never becomes absolute zero, although it may appear to be absolute zero in the image.

Table 1.
A comparison of various control methods regarding FD and ITAE.
The simulation results show that the type-2 fuzzy system provides far better results than the type-1 fuzzy system. The reason for this is the number of adjustable parameters of the type-2 fuzzy system; therefore, it has a higher degree of freedom. On the other hand, adjusting the parameters of a type-2 fuzzy system using the evolutionary algorithm had a significant impact on its performance. Naturally, evolutionary algorithms find the overall minimum points and deliver an optimal answer. Though the complexity of the problem increases, in a power system, the highest accuracy and the fastest response are much more important.
5.2. A Comparison of Various Control Methods
In this section, the values obtained for two FD and ITAE criteria were checked using different methods. In addition to the proposed methods in [43,44], we determined two FD and ITAE criteria using PID, T1Fuzzy-PID, and T2Fuzzy-PID control methods and compared them with the values obtained from the proposed method.
As shown in Table 1, our proposed methodology in this work is much better than other techniques. The FD criterion, which is related to overshoot and undershoot, is very important in the power system, and our proposed method performed very well according to this criterion, noting that the number of control methods in this criterion is less than 65.
6. Conclusions
In this work, the virus colony search (VCS) algorithm was employed, for the first time, to update the parameters of a power stabilization control system. The used control system was a hybrid PID and type-2 fuzzy controller, and this powerful optimization algorithm was able to determine the optimum values of the controller parameters at any time. To evaluate the performance of the control system, three-phase short-circuits were applied in the form of a transient fault and a permanent fault. The response of the typical PID controller diverged in the face of a persistent fault. For the simulation, the performances of the three control systems T1Fuzzy-PID, T2Fuzzy-PID, and VSC based T2Fuzzy-PID (proposed method) were compared, and our proposed method performed significantly better. Other evolutionary algorithms can be used as suggestions for further work, and type-3 fuzzy performance can also be evaluated. Finally, the results obtained for the FD standard as well as the ITAE standard are equal to 59 and 19, respectively, which shows the superiority of the proposed method over other studies that have been reviewed. Additionally, the results obtained for these two parameters, the FD standard and ITAE standard, with the T2Fuzzy PID method are equal to 79 and 22, respectively, which again shows the superiority of the proposed method.
Author Contributions
Conceptualization, Y.W. and A.S.; Methodology, Y.W., Z.M. and A.S.; Software, Y.W. and Z.M.; Validation, Y.W.; Formal analysis, Z.M.; Investigation, Y.W., Z.M., M.M.S. and A.S.; Resources, M.M.S.; Data curation, Z.M. and M.M.S.; Writing—original draft, Y.W., Z.M. and M.M.S.; Writing—review & editing, M.M.S. and A.S.; Visualization, A.S.; Supervision, A.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1.
Nomenclature.
Table A1.
Nomenclature.
| Description | Symbol | Description | Symbol |
|---|---|---|---|
| Electric torque | Rotor angle | ||
| Stimulus time constant of the excitation circuit | Rotor speed | ||
| Regulator gain | Mechanical input power | ||
| Regulator time constant | Electric output power | ||
| Reference voltage | Generator internal voltage | ||
| Terminal voltage | Equivalent excitation voltage | ||
| Inertia of the ith machine | Mechanical torque of the ith machine | ||
| Electrical torque of the ith machine | Current iteration of the program | ||
| Dimension of the problem | Composition coefficient | ||
| Number of operating points of the system | Number of generators | ||
| The response session time | The simulation time for the optimization process |
References
- Gu, C.; Chi, E.; Guo, C.; Salah, M.M.; Shaker, A. A New Self-Tuning Deep Neuro-Sliding Mode Control for Multi-Machine Power System Stabilizer. Mathematics 2023, 11, 1616. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Azizi, A.; Din, S.U.; Mohammadzadeh, A.; Mobayen, S. A hybrid approach for fault location in power distributed networks: Impedance-based and machine learning technique. Electr. Power Syst. Res. 2022, 210, 108073. [Google Scholar] [CrossRef]
- Kumar, A.; Bhagat, S.K. Application of Lyapunov’s Method for Multi-Machine Power System Stability Analysis. In Proceedings of the 2022 Second International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 21–22 April 2022; pp. 1–6. [Google Scholar]
- Guo, X.; Shirkhani, M.; Ahmed, E.M. Machine-Learning-Based Improved Smith Predictive Control for MIMO Processes. Mathematics 2022, 10, 3696. [Google Scholar] [CrossRef]
- Aazami, R.; Heydari, O.; Tavoosi, J.; Shirkhani, M.; Mohammadzadeh, A.; Mosavi, A. Optimal Control of an Energy-Storage System in a Microgrid for Reducing Wind-Power Fluctuations. Sustainability 2022, 14, 6183. [Google Scholar] [CrossRef]
- Liu, S.; Niu, B.; Zong, G.; Zhao, X.; Xu, N. Adaptive Neural Dynamic-Memory Event-Triggered Control of High-Order Random Nonlinear Systems with Deferred Output Constraints. IEEE Trans. Autom. Sci. Eng. 2023; Early Access. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, X.; Wang, H.; Zong, G.; Xu, N. Hierarchical sliding-mode surface-based adaptive actor–critic optimal control for switched nonlinear systems with unknown perturbation. IEEE Trans. Neural Netw. Learn. Syst. 2022; Early Access. [Google Scholar] [CrossRef]
- Iranmehr, H.; Aazami, R.; Tavoosi, J.; Shirkhani, M.; Azizi, A.R.; Mohammadzadeh, A.; Mosavi, A.H.; Guo, W. Modeling the price of emergency power transmission lines in the reserve market due to the influence of renewable energies. Front. Energy Res. 2022, 9, 944. [Google Scholar] [CrossRef]
- Latif, S.; Irshad, S.; Ahmadi Kamarposhti, M.; Shokouhandeh, H.; Colak, I.; Eguchi, K. Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization. Electronics 2022, 11, 946. [Google Scholar] [CrossRef]
- Danyali, S.; Aghaei, O.; Shirkhani, M.; Aazami, R.; Tavoosi, J.; Mohammadzadeh, A.; Mosavi, A. A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems. Sustainability 2022, 14, 11731. [Google Scholar] [CrossRef]
- Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Mohammadi, F.; Mohammadi-Ivatloo, B.; Gharehpetian, G.B.; Ali, M.H.; Wei, W.; Erdinç, O.; Shirkhani, M. Robust control strategies for microgrids: A review. IEEE Syst. J. 2021, 16, 2401–2412. [Google Scholar] [CrossRef]
- Zhang, H.; Zou, Q.; Ju, Y.; Song, C.; Chen, D. Distance-based support vector machine to predict DNA N6-methyladenine modification. Curr. Bioinform. 2022, 17, 473–482. [Google Scholar]
- Cao, C.; Wang, J.; Kwok, D.; Cui, F.; Zhang, Z.; Zhao, D.; Li, M.J.; Zou, Q. webTWAS: A resource for disease candidate susceptibility genes identified by transcriptome-wide association study. Nucleic Acids Res. 2022, 50, D1123–D1130. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhao, X.; Zhang, L.; Niu, B.; Zong, G.; Xu, N. Observer-based adaptive fuzzy hierarchical sliding mode control of uncertain under-actuated switched nonlinear systems with input quantization. Int. J. Robust Nonlinear Control 2022, 32, 8163–8185. [Google Scholar] [CrossRef]
- Tang, F.; Niu, B.; Zong, G.; Zhao, X.; Xu, N. Periodic event-triggered adaptive tracking control design for nonlinear discrete-time systems via reinforcement learning. Neural Netw. 2022, 154, 43–55. [Google Scholar] [CrossRef]
- Zhao, Y.; Niu, B.; Zong, G.; Xu, N.; Ahmad, A.M. Event-triggered optimal decentralized control for stochastic interconnected nonlinear systems via adaptive dynamic programming. Neurocomputing 2023, 539, 126163. [Google Scholar] [CrossRef]
- Cheng, F.; Liang, H.; Niu, B.; Zhao, N.; Zhao, X. Adaptive neural self-triggered bipartite secure control for nonlinear MASs subject to DoS attacks. Inf. Sci. 2023, 631, 256–270. [Google Scholar] [CrossRef]
- Kamarposhti, M.A.; Colak, I.; Iwendi, C.; Band, S.S.; Ibeke, E. Optimal coordination of PSS and SSSC controllers in power system using ant colony optimization algorithm. J. Circuits Syst. Comput. 2022, 31, 2250060. [Google Scholar] [CrossRef]
- Xue, B.; Yang, Q.; Xia, K.; Li, Z.; Chen, G.Y.; Zhang, D.; Zhou, X. An AuNPs/mesoporous NiO/nickel foam nanocomposite as a miniaturized electrode for heavy metal detection in groundwater. Engineering 2022, in press. [CrossRef]
- Li, P.; Yang, M.; Wu, Q. Confidence interval based distributionally robust real-time economic dispatch approach considering wind power accommodation risk. IEEE Trans. Sustain. Energy 2020, 12, 58–69. [Google Scholar] [CrossRef]
- Ammari, C.; Belatrache, D.; Touhami, B.; Makhloufi, S. Sizing, optimization, control and energy management of hybrid renewable energy system—A review. Energy Built Environ. 2022, 3, 399–411. [Google Scholar] [CrossRef]
- Si, Z.; Yang, M.; Yu, Y.; Ding, T. Photovoltaic power forecast based on satellite images considering effects of solar position. Appl. Energy 2021, 302, 117514. [Google Scholar] [CrossRef]
- Gönenç, A.; Acar, E.; Demir, İ.; Yılmaz, M. Artificial Intelligence Based Regression Models for Prediction of Smart Grid Stability. In Proceedings of the 2022 Global Energy Conference (GEC), Batman, Turkey, 26–29 October 2022; pp. 374–378. [Google Scholar]
- Tang, F.; Wang, H.; Chang, X.H.; Zhang, L.; Alharbi, K.H. Dynamic event-triggered control for discrete-time nonlinear Markov jump systems using policy iteration-based adaptive dynamic programming. Nonlinear Anal. Hybrid Syst. 2023, 49, 101338. [Google Scholar] [CrossRef]
- Cheng, F.; Wang, H.; Zhang, L.; Ahmad, A.M.; Xu, N. Decentralized adaptive neural two-bit-triggered control for nonstrict-feedback nonlinear systems with actuator failures. Neurocomputing 2022, 500, 856–867. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Abdali, A.; Mohammadzadeh, A.; Nazari, M.; Mobayen, S.; Asad, J.H.; Bartoszewicz, A. A New General Type-2 Fuzzy Predictive Scheme for PID Tuning. Appl. Sci. 2021, 11, 10392. [Google Scholar] [CrossRef]
- Ansari, J.; Abbasi, A.R.; Heydari, M.H.; Avazzadeh, Z. Simultaneous design of fuzzy PSS and fuzzy STATCOM controllers for power system stability enhancement. Alex. Eng. J. 2022, 61, 2841–2850. [Google Scholar] [CrossRef]
- Cheng, Y.; Niu, B.; Zhao, X.; Zong, G.; Ahmad, A.M. Event-triggered adaptive decentralised control of interconnected nonlinear systems with Bouc-Wen hysteresis input. Int. J. Syst. Sci. 2023, 54, 1275–1288. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Azizi, A. Control engineering solutions during epidemics: A review. Int. J. Model. Identif. Control. 2021, 39, 97–106. [Google Scholar] [CrossRef]
- Wang, M.; Yang, M.; Fang, Z.; Wang, M.; Wu, Q. A Practical Feeder Planning Model for Urban Distribution System. IEEE Trans. Power Syst. 2022, 38, 1297–1308. [Google Scholar] [CrossRef]
- Dekaraja, B.; Saikia, L.C. Impact of energy storage and flexible alternating current transmission devices in combined voltage and frequency regulation of multiarea Multisource Interconnected Power System. Energy Storage 2022, 4, e317. [Google Scholar] [CrossRef]
- Penchalaiah, G.; Ramya, R. Investigation on Power System Stability Improvement Using Facts Controllers. In Proceedings of International Conference on Power Electronics and Renewable Energy Systems: ICPERES 2021; Springer: Singapore, 2021; pp. 499–506. [Google Scholar]
- Tan, J.; Liu, L.; Li, F.; Chen, Z.; Chen, G.Y.; Fang, F.; Guo, J.; He, M.; Zhou, X. Screening of endocrine disrupting potential of surface waters via an affinity-based biosensor in a rural community in the Yellow River Basin, China. Environ. Sci. Technol. 2022, 56, 14350–14360. [Google Scholar] [CrossRef]
- Jebali, M.; Kahouli, O.; Hadj Abdallah, H. Optimizing PSS parameters for a multi-machine power system using genetic algorithm and neural network techniques. Int. J. Adv. Manuf. Technol. 2017, 90, 2669–2688. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Zhao, X.; Xu, N. Event-triggered adaptive tracking control for uncertain fractional-order nonstrict-feedback nonlinear systems via command filtering. Int. J. Robust Nonlinear Control 2022, 32, 7987–8011. [Google Scholar] [CrossRef]
- Alshammari, F.A.; Alshammari, G.A.; Guesmi, T.; Alzamil, A.A.; Alshammari, B.M.; Alshammari, A.S. Local search-based non-dominated sorting genetic algorithm for optimal design of multimachine power system stabilizers. Eng. Technol. Appl. Sci. Res. 2021, 11, 7283–7289. [Google Scholar] [CrossRef]
- Zhang, W.; Shi, W.; Sun, B. BDI Agent and QPSO-based Parameter Optimization for a Marine Generator Excitation Controller. Intell. Autom. Soft Comput. 2019, 25, 423–431. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Ibrahim, M.F. Hybrid design of PID controller for four DoF lower limb exoskeleton. Appl. Math. Model. 2019, 72, 17–27. [Google Scholar] [CrossRef]
- Afolabi, T.; Farzaneh, H. Optimal Design and Operation of an Off-Grid Hybrid Renewable Energy System in Nigeria’s Rural Residential Area, Using Fuzzy Logic and Optimization Techniques. Sustainability 2023, 15, 3862. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sadati, N.; Zamani, I. H∞ disturbance attenuation of fuzzy large-scale systems. In Proceedings of the 2011 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2011), Taipei, Taiwan, 27–30 June 2011. [Google Scholar]
- Yan, S.-R.; Alattas, K.A.; Bakouri, M.; Alanazi, A.K.; Mohammadzadeh, A.; Mobayen, S.; Zhilenkov, A.; Guo, W. Generalized Type-2 Fuzzy Control for Type-I Diabetes: Analytical Robust System. Mathematics 2022, 10, 690. [Google Scholar] [CrossRef]
- Kumbasar, T. Robust stability analysis and systematic design of single-input interval type-2 fuzzy logic controllers. IEEE Trans. Fuzzy Syst. 2015, 24, 675–694. [Google Scholar] [CrossRef]
- Wen, S.; Wang, Y.; Tang, Y.; Xu, Y.; Li, P.; Zhao, T. Real-time identification of power fluctuations based on LSTM recurrent neural network: A case study on Singapore power system. IEEE Trans. Ind. Inform. 2019, 15, 5266–5275. [Google Scholar] [CrossRef]
- Kundr, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Ghanamijaber, M. A hybrid fuzzy-PID controller based on gray wolf optimization algorithm in power system. Evol. Syst. 2019, 10, 273–284. [Google Scholar] [CrossRef]
- Sokólski, P.; Rutkowski, T.A.; Ceran, B.; Horla, D.; Złotecka, D. Power system stabilizer as a part of a generator MPC adaptive predictive control system. Energies 2021, 14, 6631. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).