Abstract
Drones, or UAVs, are developed very intensively. There are many effective applications of drones for problems of monitoring, searching, detection, communication, delivery, and transportation of cargo in various sectors of the economy. The reliability of drones in the resolution of these problems should play a principal role. Therefore, studies encompassing reliability analysis of drones and swarms (fleets) of drones are important. As shown in this paper, the analysis of drone reliability and its components is considered in studies often. Reliability analysis of drone swarms is investigated less often, despite the fact that many applications cannot be performed by a single drone and require the involvement of several drones. In this paper, a systematic review of the reliability analysis of drone swarms is proposed. Based on this review, a new method for the analysis and quantification of the topological aspects of drone swarms is considered. In particular, this method allows for the computing of swarm availability and importance measures. Importance measures in reliability analysis are used for system maintenance and to indicate the components (drones) whose fault has the most impact on the system failure. Structural and Birnbaum importance measures are introduced for drone swarms’ components. These indices are defined for the following topologies: a homogenous irredundant drone fleet, a homogenous hot stable redundant drone fleet, a heterogeneous irredundant drone fleet, and a heterogeneous hot stable redundant drone fleet.
Keywords:
UAV; drone; fleet; swarm; multi-UAV; reliability; availability; k-out-of-n system; importance analysis MSC:
37M10; 90B25; 06E30
1. Introduction
The application of drones or UAVs in different areas is being developed very intensively [1,2,3,4]. One of the important properties of their application in any area is reliability. Known methods of reliability analysis and evaluation can be used in this domain. The choice of method for reliability analysis is dependent on many factors, from a mathematical representation of an investigated system to calculated indices and measures for reliability analysis. A review of publications in drone reliability analysis allows us to indicate three important “parts” of drone reliability analysis (Figure 1):
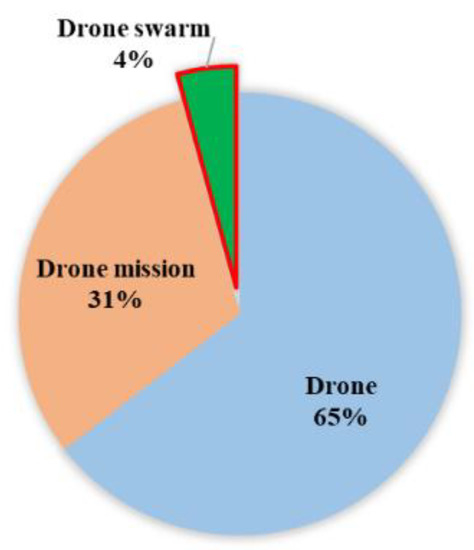
Figure 1.
The three parts of studies in drone reliability.
- Reliability analysis of a single drone. In this case, a drone is a system from the point of view of reliability analysis. The components of the drone are considered system components and impact its operation and reliability [5]. There are many investigations of drone components. These components can be divided into two groups. The first group comprises the hardware and mechanical components of drones, for example, the propellers [6], motors and power system [7,8,9], communication platform and sensors [8,10,11,12], and mechanical components [13]. The other group of components consists of the software used for drone mission support, for which the methods of software reliability are applied [14,15,16,17]. There is one more direction for drone reliability improvement: the development of machine-learning-based and AI-based methods to improve some of a drone’s components’ functioning [18,19,20,21,22]. However, in these studies, the proposed methods do not evaluate drone reliability directly and consider reliability as one of the positive characteristics of developed methods.
- Reliability evaluation of a drone mission. In these studies, as a rule, the problem of the fulfillment or non-fulfillment of the assigned mission by the drone is considered and this mission result is evaluated by reliability or risk. Many of the developed methods focus on the tasks of planning or optimizing the flight path [23,24,25]. However, reliability and risk are not considered according to the reliability of engineering designs. An important tendency in reliable drone missions is the application of artificially intelligent and machine learning methods in the mission’s development and support [26,27,28]. A discussion of reliability analysis methods for drone missions is in some papers: redundancy of drone components [29], maintenance [30], prognostic and health management [31], importance analysis [32], safety [33], and defense [34] analysis.
- Reliability analysis of drone swarm (fleet) or multi-UAVs. A drone swarm (in some publications it is called a “fleet”) is group of drones that implement one mission or are joined by one control center [35]. In some studies, this concept is named “multi-UAVs” [36]. From the point of view of reliability analysis, the reliability of a drone swarm is influenced by many factors such as: its structure or topology [32,37], type of redundancy [38], drone characteristics [39], heterogeneity [40], and others.
The analysis and summary of publications in Science Direct, Web of Science, IEEE Explore, and Wiley Online Library (Figure 1) show that the dominant aspect of studies is the reliability analysis of a single drone. The reliability analysis of drone swarms is very infrequent in comparison with other investigations. However, an analysis of the tendencies of drone exploitations in studies [26,29,30,33,36,37,39] shows an increase in the study of drone swarms instead of lone drones. The authors of two surveys [4,39] show that drone swarms are used in domains such as: agriculture, civil road control, ecological monitoring, exploration work, monitoring of hazard processes, and others. Drone swarms are effectively used for security, survey, monitoring, surveillance [4,26,33], leisure pursuits [39], disaster management [36], environmental monitoring [33], and search and rescue [36]. Therefore, in this paper, we propose a short review of studies of the reliability analysis of drone swarms and develop a new method for drone swarm availability evaluation and analysis of drones’ faults’ impacts on swarm functioning. In the review, the terms “drone fleet”, “drone swarm”, and “multi-UAVs” are considered similar. The review is presented in Section 2. The background of the proposed method of drone swarm availability evaluation and analysis of the impact of drone fault on the swarm functioning (availability) is introduced in Section 3. The mathematical model in form of the structure function is discussed in this section. The Direct Partial Boolean Derivatives for calculation of importance measures, as well as these importance measures themselves, are considered in this section. The importance measures allow for the quantification of drone fault impact on swarm availability [32,37,41]. Four typical structures of drone swarms, depending on heterogeneity and redundancy, are discussed and evaluated based on the proposed methods in Section 3. Each of these types is considered for the decentralized and centralized control of the swarm, which influences its availability. The equations for the availability computation of each type of drone swarm structure are introduced. Two importance measures (Structural and Birnbaum importance) are defined for the components of these swarms in this section.
2. Reliability Analysis of Drone Swarm Review
As shown in the introduction above, reliability analysis and evaluation are the principal domains in research on the design and use of drones. However, most of these studies are implemented for lone drones. At the same time, the intensive development of drone-based applications provokes research in drone swarm reliability analysis. The increase of interest in research in the field of drone swarm reliability analysis can be illustrated by the growing number of publications in the scientific database Scopus (Figure 2). The development of the drone swarm structure, its optimization, elaboration of the communication platform, and other problems for the effective performance of the swarm are the subjects of many studies. The problem of reliability analysis of a swarm of drones, as well as its safety and maintenance, is considered much less frequently, in contrast to the mentioned problems or these problems in relation to a single drone (Figure 1).
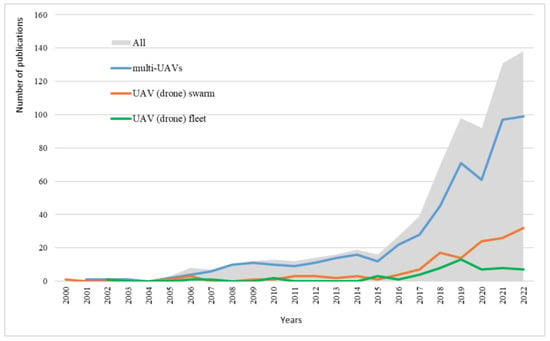
Figure 2.
The publications in the domain of drone swarm reliability analysis according to Scopus resources.
In this study, a systematic strategy was adopted to search and analyze publications related to drone swarm reliability assessment from four scientific databases (Science Direct/Scopus, Web of Science, IEEE Explore, and Wiley Online Library). In this analysis, a group of drones (UAVs) for the implementation of one mission, or some interconnected missions, is interpreted as a drone swarm or drone fleet. The expressions “drone swarm”, “drone fleet”, and “multi-drones” (multi-UAVs) are considered equivalent (Figure 2). The keywords used were: drone swarm, drone fleet, multi-drones, reliability, availability, failure, and crash, in the search query. Eighty-two papers were selected for analysis from the indicated scientific databases, and most of them are considered below in the review of innovations in the reliability analysis of drone swarms.
In three papers [30,38,42], the review methods for the reliability analysis of a single drone and a swarm (fleet) of drones were made, and systematic approaches to their reliability analysis and evaluation have been indicated. The reliability analysis of a drone swarm (fleet) is considered depending on several parameters in one paper [38]. This study [38] introduces a systematic platform in the consideration of important parameters that influenced the reliability of drone swarms. This platform takes into consideration the reliability (Figure 3) and structural (Figure 4) characteristics of drone swarms.
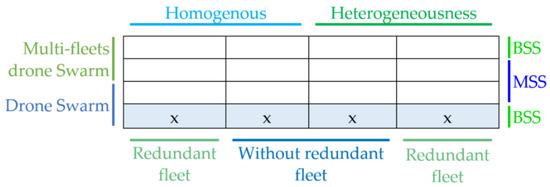
Figure 3.
Drone swarm reliability characteristics according to one paper [38].
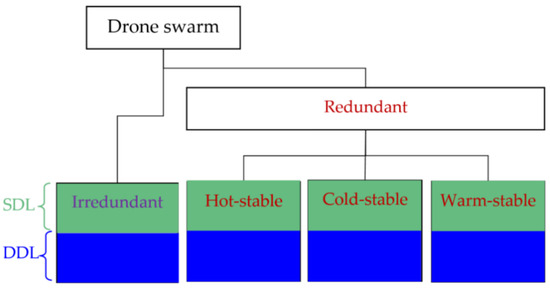
Figure 4.
Drone swarm structural characteristics according to one paper [38].
The structural characteristics of drone swarms indicated in this paper [38] can be presented as a Karnaugh map (Figure 3).
The reliability characteristic of drone swarms in this paper [38], first of all, is the redundancy of drone swarms (Figure 4). The redundant swarm can be cold-stable, hot-stable, and warm-stable. Every type of redundant swarm, according to the proposed platform, can be considered for the same distribution law (SDL) or different distribution laws (DDL) for the lifetime of the drones. For the irredundant swarm and each type of redundant swarm, the flight time is taken into consideration, which includes the switching-on time of redundant drone(s) and the time of flight to change the failed drone: redundant drones can have the same flight time from a starting position to a failed drone/drone fleet and a different flight time.
According to the platform in this paper [38], research on drone reliability can be implemented for a single drone or for drone swarms. A mathematical model of drone swarm representation for reliability analysis should take into consideration the structural characteristics as (Figure 3):
- The swarm structure, which can include one fleet (drome swarm) or more than one drone fleet (multi-fleets drone swarm).
- The heterogeneous or homogenous types of swarms; in the case of homogenous drone swarms, all drones have similar characteristics and properties.
- The presence of a reserved fleet of drones in the overall structure of drone swarm.
- The number of states in swarm performance: a mathematical model of a Binary-state system (BSS) allows the representation of two states in swarm performance (failure and functioning) and a mathematical model of a Multi-state system (MSS) [43,44] allows for the investigation of degradation in swarm performance.
It should be noted that in addition to the structural characteristics of a swarm of drones in Figure 4, when building a mathematical model the number of tasks (missions) performed can be considered [38]: one or more. This characteristic is essential in the study of a swarm’s mission reliability [23,24,25,26,27,28]. In this paper, we would like to consider the structures of drone swarms that are formed by one fleet, which can include the redundant fleet only [38] (these structures are marked by “x” in Figure 3).
The proposed platform in the aforementioned paper [38] includes consideration of a single drone and two types of swarms, which are the drone swarm and multi-fleets drone swarm. However, the more critical topological aspect of a drone swarm is the type of management or control of the swarm. This control can be centralized or distributed [45]. The platform of drone swarm reliability analysis from this paper [38] does not take into consideration the problem of reliability evaluation, for example, analysis of drone unavailability, maintenance policy, analysis of topology reliability, drone swarm degradation, and communication platform reliability, which includes the control problem of a swarm [42]. Therefore, in this review, reliability problems are the background for analysis.
The first important problem in the reliability analysis of drone swarms is the analysis and evaluation of their reliability, availability, basic frequency, and time evaluations. In this case, the mathematical model of the swarm is considered a binary-state system or multi-state system. A binary-state system assumes two states in the swarm performance: functioning and failure [16,45,46,47]. The mathematical model of the multi-state system allows analysis of the swarm’s reliability degradation [43,44,48]. These mathematical models can be analyzed by stochastic methods [16,43,46], Monte Carlo simulation [47], and algebraic logic methods [37,44,45].
The reliability properties of the system’s topology and maintenance policy are investigated based on methods of importance analysis in reliability engineering. These methods indicate the system components with the most impact on the system failure and/or functioning [41]. The structure of the drone swarm based on importance analysis is studied in several papers [32,37,44,49]. The maintenance for UAV swarms based on importance analysis is studied in two papers [50,51]. Preventive maintenance based on importance analysis is studied in one paper [32].
The problem of topology reliability correlates with the problem of swarm control reliability and communication system reliability analysis. The communication platform resilience of a drone swarm is investigated in one paper [52]. In some studies [52,53,54], the communication platform is investigated for the distribution structure of the control. Authors of two papers [55,56] considered the swarm structure, which has central communication with a communication center.
Topological reliability analysis partly correlates with the problem of redundancy in a system. This problem is very important for the drone swarm [38,57]. There are two basic redundancy types: active redundancy and standby redundancy [58]. Standby redundancy can be further classified into three types: hot, cold, and warm standby sparing [59]. Hot standby sparing is used as a failover mechanism to ensure the reliability of system configurations [60]. Hot standby sparing is generally used for applications wherein the recovery time is critical. The mathematical model for this type of redundancy is equal to active redundancy if the switching delays and failures are not taken into account. In the case of cold standby sparing, the spare component starts functioning only when the working component fails and needs to be replaced. This type of sparing is typically used in systems that are critical for energy consumption. Warm standby sparing compromises energy consumption and recovery time. The spare components are partially powered up when the primary component is operational, and they are fully powered up only after the primary component fails.
Hot standby sparing is a fault-tolerance technique that attempts to improve system reliability while compromising the system recovery time [61]. This technique supposes the redundancy of some components of the system, but the reliability of warm standby sparing can decrease with an increasing level of redundancy (number of redundancy components). This technique is effective for a drone fleet. In one paper [62], two scenarios of drones, wherein they can be failed or on standby, are considered.
In addition, the type of swarm, such as homogenous and heterogeneous, can be considered in the context of the reliability of the drone swarm structure. Heterogeneous swarms are studied in three papers [44,63,64]. In some studies [53,55,61], a swarm of drones is represented by drones of one type.
The analysis of the basic indices and measures in reliability analysis and the analysis of structural (topological) reliability are based on quantitative methods of reliability analysis. The most frequently used techniques for qualitative analysis of systems and drone swarms, in particular, are Failure Modes and Effects Analysis (FMEA) or Failure Modes, Effects, and Criticality Analysis (FMECA), and Fault Tree Analysis (FTA). In the case of qualitative analysis of a swarm of drones in order to identify failure modes, methods of risk assessment can be used, for example, FMEA [65], FMECA [66], or FTA [67]. These methods allow for the analysis of failures, their causes, and their effects on a drone swarm. For example, in one paper [65], FMEA is used for the design of a multirotor system. Authors in another paper [66] propose a framework based on FMEA, FMECA, and FTA to identify the critical scenarios in a mission of UAVs inspecting offshore wind farms. FTA is used to analyze and evaluate the communications between drones or between drones and ground station control in another paper [46]. The problem of cybersecurity attacks against drones is investigated based on the fault tree in another paper [66]. It provides a perspective on the application of prognostic and health management (PHM) methods for drone swarm analysis [68]. These methods are used for the simulation of maintenance strategies in a highly dynamic and event-based environment [69]. PHM can be an effective background for the development of maintenance recommendations for drone swarms, taking into consideration mission time, task priority, and the vehicle’s health condition [70]. To analyze typical fault modes in drone swarms when interacting with other systems or structurally and functionally complex drone swarms, the PHM approach can be used [71].
The proposed review of investigations in drone swarm reliability analysis shows that there are gaps in the development methods for the definition and computation of basic indices and measures of these systems. In this paper, the availability and two types of importance measures (structural importance and Birnbaum importance) are introduced for four structures of drone swarms.
3. Structure Function-Based Approach of Reliability Analysis
3.1. Structure Function
In this study, the functioning of the drone fleet is considered for two performance levels: working (fulfillment of the mission) and failure. The reliability analysis of a drone fleet can be implemented based on different mathematical approaches. One of these is the structure function-based approach. According to this approach, the system is represented by the structure function, which defines the correlation of the system components’ states and system state:
where is a vector of the system components’ states (state vector); the variable represents the state of the system component i: the component is functioning if and the component i is failed if ; is the structure function value that agrees with the system state: the system is functioning if and the system is failed if .
The structure function advantages are: (a) the representation of a system of any structural complexity, and (b) simple methods for reliability evaluation. The disadvantage is the exponentially increasing dimension of the structure function depending on the number of system components [72]. For this difficult decision in reliability analysis, some approaches have been proposed. One of them is use of a Binary Decision Diagram (BDD), which has been developed in Boolean Algebra [73] and is effective for the processing of the function of large dimensions [74,75,76]. The drone fleet is not a large dimensional system [32,77]. Therefore, the structure function can be an effective mathematical model for drone fleet reliability analysis.
The structural function in the context of a drone fleet is the fulfillment of the mission of the fleet depending on the performance of the drones: the drone is represented by the variable and the drone fleet state is indicated by the structure function value. An important property of the drone fleet is coherence. For a coherent system, (a) all components are relevant to the system (for each variable there are state vectors for which ), and (b) failure of any component cannot result in the improvement of the system functioning ( for any component), where and . The structure function (1) for a coherent system is monotonically non-decreasing [72].
3.2. Availability Defined Based on a Structure Function
There are many methods and algorithms for the analysis of a system’s reliability based on its structure function [32,57,75,78,79,80]. System reliability analysis is implemented if the probability of the system components’ failure and functioning is defined. These probabilities can be defined as distribution for time dependent analysis or as discrete values for the system reliability analysis in the stationary state. The stationary state of the system is investigated for the evaluation of the system structure reliability in several papers [57,75,80]. In this study, the drone swarm structure reliability is evaluated, therefore, the probability of the component failure and functioning state are defined, respectively, as:
The system’s probabilities, being functioning and failing, are known as the system availability and unavailability [72,79]:
The system availability and unavailability are the general evaluations of the system, but the reliability analysis of the structure of the system needs to indicate the influence of each of the system components on its failure and functioning. This analysis can be done by the importance analysis of the system [41].
3.3. Importance Analysis of UAV Fleets
Importance analysis allows the evaluation of the impact of every component on the system by importance measures (IMs). IMs quantify various aspects of the system’s performance, failure, or change of its state depending on the failure of a functioning component or restoration of a failed component. The most frequently used IMs for the analysis of the reliability of the system structure are structural importance (SI) and Birnbaum importance (BI) [41]. There are different methods for the calculation of IMs based on the system structure’s function. In this study, a method based on the concept of Direct Partial Boolean Derivative (DPBD) is used for the computation of IMs [81].
The DPBD of the structure function with respect to the variable defines the sets of the state vectors of variables, for which the change of this variable value results in the change of the structure function value [81,82]:
where s, , j, ∈ {0,1}, and , ; the change of the variable value from s to and the function value from j to is defined by the symbol →.
In reliability analysis, DPBD of the structure function allows the definition of the system component states (state vectors) for which the change of the component causes the system state change [81]. In this study, the drone swarm is considered as an unrestored system, therefore the importance analysis should be done for the system failure depending on the fault of the component . The DPBD (6) in this case is defined for the system and component change from 1 to 0 as:
The DPBD (7) is used for the computation of IMs. In particular, this derivative allows the computation of SI and BI.
The SI evaluates the topological properties of the system and can be used in the system development step, when the probabilities of component failure (2) and functioning (3) are not introduced [41,83]. The SI of the component is the probability of the system failure if this component breaks down, or the proportion of situations for which the failure of the component causes the system failure in all possible system states. Taking into consideration the definition of DPBD (7), the SI of the component is defined as the proportion of non-zero values of DPBD:
where TD(.) is the truth density of the argument and this value agrees with the relative number of vectors for which the argument takes a nonzero value; is the number of the system states for which the fault of the component causes the system failure, or it is non-zero values of the DPBD (7).
The BI is defined as the probability of system failure caused by the fault of component [41] and it is computed based on DPBD as:
3.4. Hand-Calculated Example
Let us consider the swarm of three drones. The swarm includes the first drone () with a probability of failure and two others ( and ) with a probability of failure . The swarm performs if two of three drones are functioning (it is a two-out-of-three system). The structure function of this swarm is:
and it is shown in the second column of Table 1 in form of the truth table. According to the definition of a system availability (4), the system availability based on structure function (10) is and unavailability according to (5) is . The SI and BI of this system are computed based on DPBDs in Table 1. The SIs for all system components are equal: . This means that, from the point of view of the swarm’s topology, any component fault has a similar influence on the system failure. The BI of the first drone is larger than the two others: and . Therefore, the fault of the first drone has a larger impact on the swarm failure.

Table 1.
The structure function and its DPBDs of the drone swarm with the structure function (10).
This example illustrates that the considered method can be used for the reliability analysis and evaluation of typical structures of drone swarms. The typical structures of drone swarms can be mathematically represented by typical structures of the system in reliability analysis: series, parallel, and k-out-of-n. There are two definitions of a k-out-of-n system. A k-out-of-n:G is functioning if k or more of n components are in a working state. A k-out-of-n:F is a system that fails if at least k components have failed. In this study only the k-out-of-n:G type is used, therefore, the nomination k-out-of-n will be used for this system. It is well known that the system k-out-of-n is a generalization of two other typical structures: 1-out-of-n corresponds to a parallel system and n-out-of-n agrees with a series system. Therefore, the drone fleet functioning is presented and studied as a k-out-of-n system in this paper.
4. Typical Structures of Drone Swarms
Structure function-based reliability analysis methods are typically used for the analysis and evaluation of a system in a stationary state. This means that system performance does not change for a long time, and its evaluation is time independent. The typical assumption about the structure function is the independence of the failure of each drone from other drones’ failures. These methods are adequate for the analysis of the system structure from the point of view of its reliability. The quantification of the reliability of the system structure is implemented by the availability (4), unavailability (5), SI (8), and BI (9). Therefore, the topological properties of the systems (drone swarms) can be evaluated based on structure function-based methods. In this study, the drone swarm is represented as BSS, and only two states in the swarm performance are investigated (failure and functioning). The reliability evaluation is implemented for the swarm in a stationary state. The assumption about equivalent properties of multi-functions and heterogeneous swarms is made in this study. Four topologies of drone swarms are considered and evaluated:
- Homogenous irredundant drone swarm;
- Homogenous hot stable redundant drone swarm;
- Heterogeneous irredundant drone swarm;
- Heterogeneous hot stable redundant drone swarm.
These swarms can include a main drone fleet (MDF) for the implementation of the objective action, a reverse drone fleet (RDF) for the support of the functioning state of an MDF, and control unit (CU) for the coordination of drones’ actions.
4.1. Homogenous Irredundant Drone Swarms
A homogenous irredundant drone swarm (Figure 5) has two topologies. One of them has distributed control (Figure 5a) and the other topology includes the CU (Figure 5b). A decentralized control topology supposes that all drones in the swarm should be in their operating state for the mission’s implementation. This topology is interpreted as the n-out-of-n system or the series system with the structure function:
where is the symbol of Boolean operation AND for w variables.
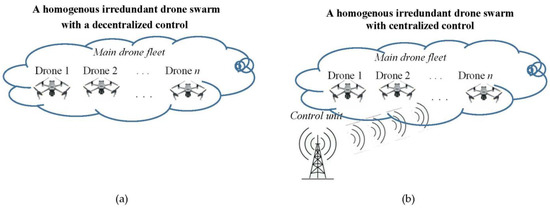
Figure 5.
The topologies of a homogenous irredundant drone swarm with decentralized (a) and centralized (b) control.
A homogenous irredundant drone swarm with decentralized control (Figure 5a) is formed by drones that have equal characteristics. In particular, the probability of the drone to be in a working state is (3): for . This allows us to define the fleet availability according to Equations (4) and (11) as:
The homogenous type of this swarm causes IM, as SI and BI, for all drones are equal and, according to definitions of SI (8) and BI (9) based on the structure function (12) are defined as:
A homogenous irredundant drone swarm with the central CU (Figure 5b) is in operating state if all (n − 1) drones of MDF are functioning, and CU is functioning too. Therefore, the structure function of this swarm is the series system of the MDF of (n − 1) drones and CU:
where the variables from to represent the states of the drones of the MDF, and variable represents the states of the CU.
The availability of a homogenous irredundant drone swarm with central CU (Figure 5b) is similar to the availability of a homogenous irredundant drone swarm with decentralized control. The availability definition should take into consideration the probability of functioning of the CU :
where is the probability of the working state of (n − 1) drones of MDF and is the probability of CU being in the operating state.
The definitions of availabilities (12) and (16) for irredundant homogenous drone swarms allow us to conduct the analysis and comparison of the availability of these topologies (see Figure 6). The curves of availabilities in Figure 6 reflect the average values of availabilities of these two swarms. The availabilities in Figure 6 are computed for the probabilities of drones and CU functioning (2), which change from 0.600 to 0.999. Furthermore, in this analysis, the probability of the CU functioning is considered greater than the probability of the operational state of the drone. According to this study, a homogenous irredundant drone swarm with central CU has the best availability if the swarm consists of less than 12 drones. The availability of both topologies for a large number of drones is almost the same.
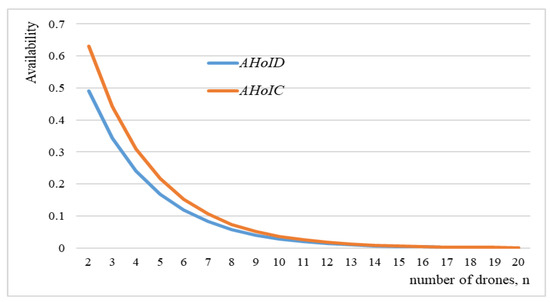
Figure 6.
The availabilities of homogenous irredundant drone swarm.
SI (8) and BI (9) for this topology are defined for two types of components: drone ( and ) and CU ( and ):
The comparison of IMs of two topologies of homogenous irredundant drone swarms shows that these topologies are similar, and the fault of one of the drones or the CU has an equal impact on the swarm performance. The BI of a homogenous irredundant drone swarm with CU has a small difference, which is defined by the difference between the probabilities of the fault of the drone and the CU.
4.2. Homogenous Hot Stable Redundant Drone Swarms
A homogenous hot stable redundant drone swarm is in an operational state if the fixed number of all drones are functioning. Therefore, this topology can be interpreted as a swarm formed by two fleets: MDF and RDF. The number of all drones is n, the MDF includes k functioning drones and (n − k) hot stable redundant drones form the RDF. A homogenous hot stable redundant drone swarm also has two topologies (Figure 7). Similarly to the previous topology of drone swarms, this topology can be considered with the distributed control (Figure 7a) and the CU for swarm control (Figure 7b). The hot stable redundant can be presented as the k-out-of-n. According to one paper [84], the structure function of the k-out-of-n system and analysis of its reliability can be based on an analysis of minimal paths set. The structure function of such a system is defined as the unit of the minimal paths:
where is the symbol of Boolean operation OR for k variables; the k variables (s = 1, …, k) represent the states of the drones, which are formed by the minimal paths in the topology of the k-out-of-n system and the number of the paths is defined as:
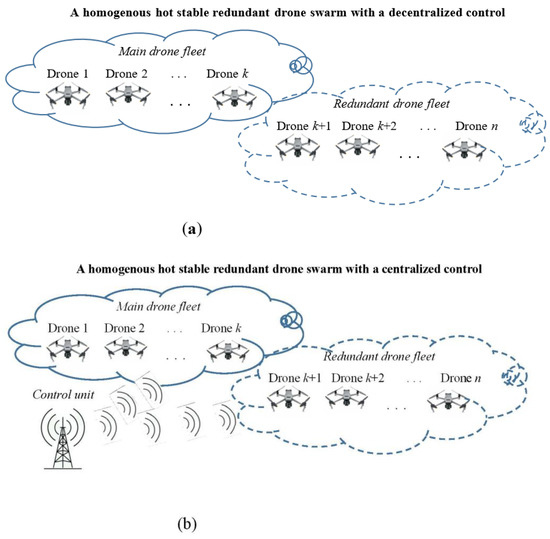
Figure 7.
The topologies of homogenous hot stable redundant drone swarms with decentralized (a) and centralized (b) control.
The structure function of k-out-of-n system (21) is formed by the implicants and each implicant has k literals.
The availability of homogenous hot stable redundant drone swarms based on the structure function (21) is defined as [84]:
The availability of a homogenous hot stable redundant drone swarm according to (23) depends on the number of operating drones’ k (see Figure 8). Therefore, the analysis of this swarm’s availability is undertaken depending on the number of drones in the swarm and the specified number of working drones. This analysis shows that the increase in the number of specified working drones for the fixed number of drones in the swarm results in a deterioration in availability. Similarly, to the previous experiments for homogenous irredundant drone swarms, availabilities in Figure 8 are shown for the average dependencies, and the analysis was performed for a set of probabilities of the operational state of drones from 0.6 to 0.0999.
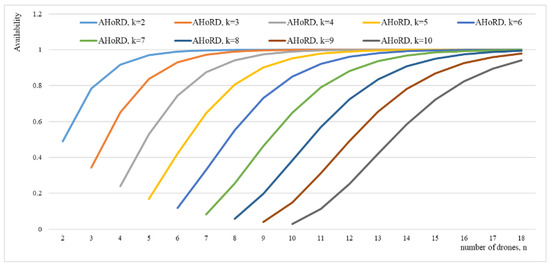
Figure 8.
The availability of a homogenous hot stable redundant drone swarm with decentralized control.
SIs (8) of a homogenous hot stable redundant drone swarm are defined based on the structure function of the system defined in (23), and the indices for every drone can be computed as:
BIs of this swarm are defined based on the Equation (9) and taking into consideration the structure function (21), and they are:
The structure function of a homogenous hot stable redundant drone swarm with the CU in Figure 7b is the series system of the MDF and CU, where the MDF of k drones and RDF of (n − k − 1) drones is the k-out-of-(n − 1) system:
where the variables from to represent the states of the drones of the MDF and RDF and variable represents the states of the CU; .
The availability of this topology of the drone swarm is computed as the availability of two series components, where the first component is k-out-of-(n − 1) system:
where is the probability of the working state of (n − 1) drones of MDF and is the probability of CU being in an operational state.
The availability of a homogenous hot stable redundant drone fleet with the CU is similar to the availability of a homogenous hot stable redundant drone fleet with decentralized control. The change of the swarm control from decentralized to centralized leads to a slight decrease in the availability of this topology with CU (see Figure 9).
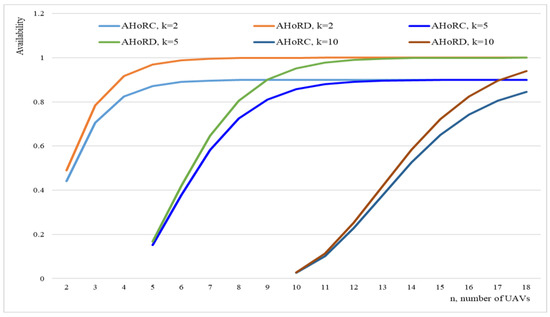
Figure 9.
Comparison of the availability of homogenous hot stable redundant drone swarms with decentralized control and CU.
SIs for this topology of drone swarm should be considered for two types of components. They are drones () and CU ():
The dependences of SIs of the drone () and the CU () on the number of system components (n) and the number of functioning drones (k) are shown in Figure 10. These diagrams show that the influence of the CU decreases in increasing the number of system components and the specified number of functioning drones. There is a similar tendency for the impact of a drone fault on the swarm failure.
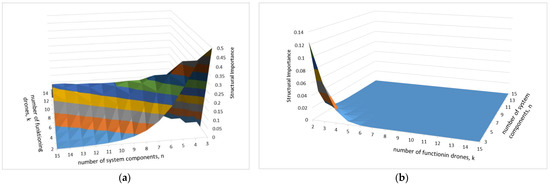
Figure 10.
The SI of the drone (a) and the CU (b) of a homogenous hot stable redundant drone swarm.
The BIs of the drone (, ) and the CU () of a homogenous hot stable redundant drone swarm are defined according to (9) based on the structure function of the topology (26):
where is the probability of the working state of (n − 1) drones of MDF and is the probability of CU being in an operational state.
The influences of the number of functioning drones for this topology of swarm on the BIs ( and ) are similar to these parameters’ influence on the SIs. The influence of the number of functioning drones and the probability of the functioning of the drone and CU of a homogenous hot stable redundant drone swarm are shown in Figure 11.
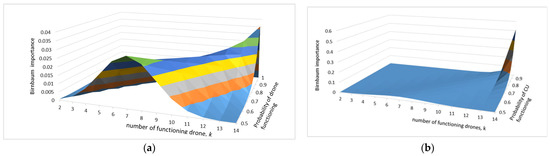
Figure 11.
The BI of the drone (a) and the CU (b) of a homogenous hot stable redundant drone swarm.
4.3. Heterogeneous Irredundant Drone Swarm
A heterogeneous irredundant drone swarm can have topology with decentralized control (Figure 12a) or centralized control with CU (Figure 12b). A heterogeneous irredundant drone swarm that can have topology with decentralized control is formed by drones of K types. Drones of every type of irredundant drone fleet are formed by a series system. All of these K series systems must be working for a heterogeneous irredundant drone fleet:
where the number of variables for all possible values of the parameters r and w is equal to the number n; is the number of drones of type r (r = 1, …, K).
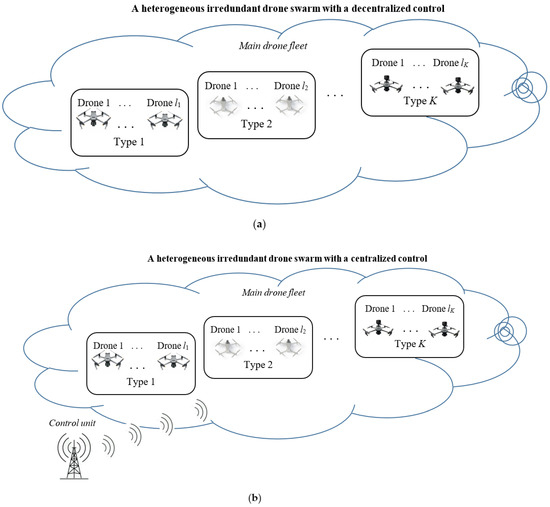
Figure 12.
The topologies of heterogeneous irredundant drone swarms with decentralized (a) and centralized (b) control.
The availability of a heterogeneous irredundant swarm should take account of some types of drones. The probability of drone of type r functioning is denoted as , where r = 1, …, K, and lr is the number of drones of type r. The availability of a heterogeneous irredundant drone swarm with decentralized control (Figure 12a) according to definitions of a structure function for this swarm (32) and availability (4) is:
A heterogeneous irredundant drone swarm with decentralized control from the point of view of reliability analysis is a series system that can be worked if all drones of all types are functioning. A similar topology has a heterogeneous irredundant drone swarm with centralized control (Figure 12b), which is also a series system with the structure function:
where the variables represent the states of drones of the MDF and for all possible values of the parameters r and w the number of these variables is equal to the number n − 1; the variable is used for the representation of CU states.
The availability of a heterogeneous irredundant drone swarm with central control (Figure 12b) based on its structure function (34), the definition of availability (4), and the assumption of the probability of the working state of CU is:
The analysis of the availabilities of heterogeneous irredundant drone swarms for two topologies are shown in Figure 13. The curves of availability have been computed for the different number of drone types and the number of drones in the swarms. The number of drone types is also taken into account; two to five types have been evaluated for these fleets of 20 drones. This experimental investigation shows that the increase in the number of drone types has a threshold, and the larger number of drone types has no positive impact on swarms’ availability. The best solution for a fleet that consists of less than seven drones is two types.
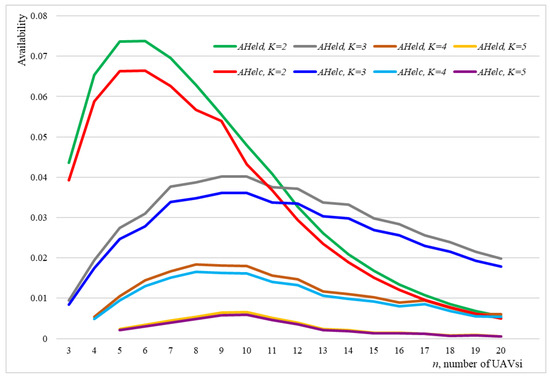
Figure 13.
The availabilities of heterogeneous irredundant UAV swarms.
The SIs of heterogeneous irredundant drone swarms with decentralized control (Figure 12a) or centralized control with CU (Figure 12b) are similar to the SIs of homogenous irredundant drone swarms, because all these swarms from the point of view of reliability analysis are series systems:
The BIs (9) of heterogeneous irredundant drone swarms of both topologies are defined based on the structure functions (32) and (34). The topologies with decentralized control and centralized control with CU are series that are caused by BI’s calculation as:
where the probability of drone of type r functioning is denoted as ; r = 1, …, K is number of types of drones and lr is the number of drones of type r; is the probability of the functioning of the drone .
4.4. Heterogeneous Hot Stable Redundant Drone Swarm
The heterogeneous hot stable redundant drone swarm with decentralized control (Figure 14a) is formed by drones of K types and every one of these types of drones is the kr-out-of-lr system with a structure function which is similar to the structure function (21). The working state of the swarm is possible if each drone type implements a specified activity. The structure function of this type of heterogeneous drone is a series system of K components which are kr-out-of-lr systems:
where is the number of combinations (22) of the minimal number of working drones of each type which provide the operational state of the swarm; is the number of minimum required working drones for type r (r = 1, …, K). Note that in reliability analysis, the combination of the minimal number of working components causing the operational state of the system is known as minimal paths of system [78].
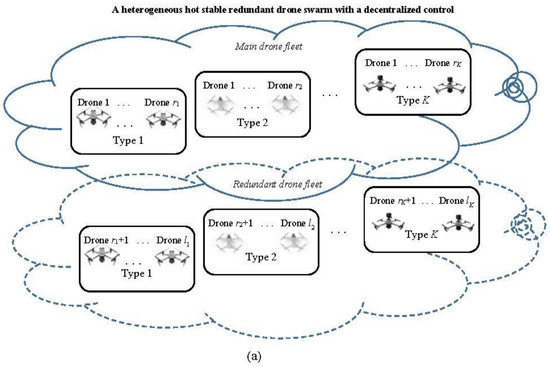
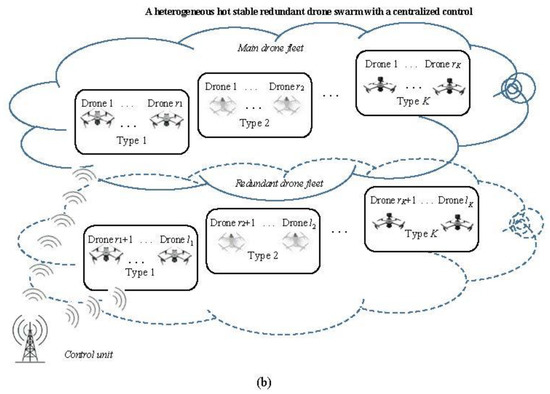
Figure 14.
The topologies of a heterogeneous hot stable redundant drone swarm with decentralized (a) and centralized (b) control.
A heterogeneous hot stable redundant drone swarm with decentralized control (Figure 14a) is formed by drones of some types and has structure function (39). The availability of this swarm topology according to (4) is defined as the availability of the k-out-of-n system as:
The evaluation of the average availability of a heterogeneous hot stable redundant drone swarm with decentralized control is shown in Figure 15. According to this analysis, the increase in the number of drones in the swarm results in a decrease in swarm availability. Therefore, the heterogeneity of the fleet increasing without a due need is unjustified from the point of view of availability.
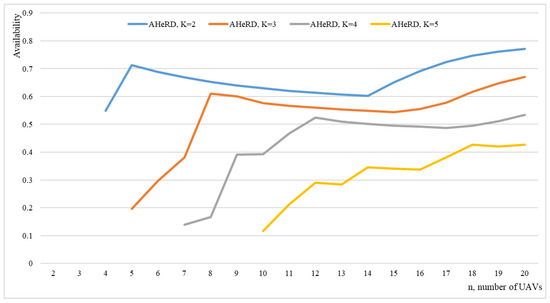
Figure 15.
The availability of a heterogeneous hot stable redundant drone swarm with decentralized control.
The SIs (8) of a heterogeneous hot stable redundant drone swarm are defined based on the structure function of this system (41) and these indices for a drone of type (), which can be computed as:
where is the number of working states of other types of drones.
The BI of the drone of the type () of a heterogeneous hot stable redundant drone swarm is defined according to (9) based on the structure function of this swarm (41) as:
where () and () are the number of the drones of type () and the number of minimum required working drones for type () ().
The BI of the drone of the type of this swarm topology (44) has a higher value if the number of functioning drones of this type increases and the general number of drones of this type is decreasing. In other words, the more the fleet of drones of type “tends” to series structure, the greater the impact on system failure the fault of the drone of this type will have. Therefore, the “tendency” of the structure of the fleet of the type to be parallel will reduce this influence, and the system as a whole will be more stable (Figure 16).
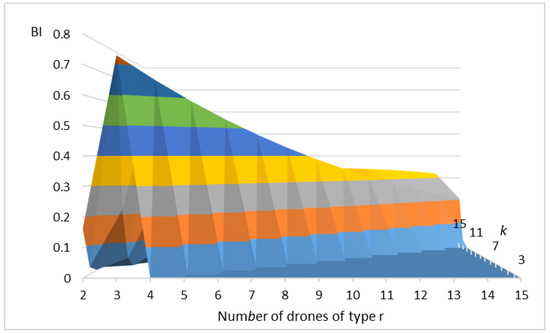
Figure 16.
The BI of the drone of type a heterogeneous hot stable redundant drone swarm with decentralized control.
A heterogeneous hot stable redundant drone swarm with the central control by CU (Figure 14b) can be represented as a group of K fleets that have the structure of kr-out-of-lr systems. The K fleets are an interconnected series and, in series, are connected with the CU :
The availability of this drone swarm (Figure 14b) is defined as:
The use of the CU for the centralized control in a heterogeneous hot stable redundant drone swarm causes the availability to decrease (Figure 17). The availability of a heterogeneous hot stable redundant drone swarm with the CU is similar to the availability of a swarm with decentralized control (42).
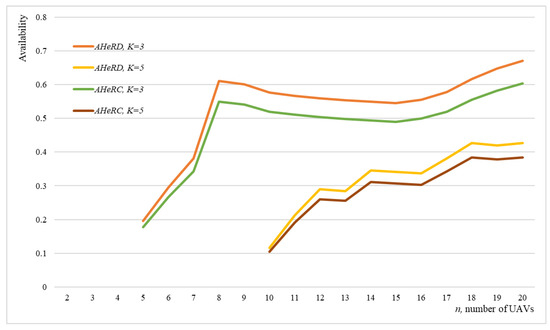
Figure 17.
Comparison of the availability of heterogeneous hot stable redundant drone swarms with decentralized control and with CU.
SIs for this topology of drone swarm should be considered for two types of components. They are drone of type () and CU ():
where is the number of working states of other types of drones.
BIs of the drone of type (, ) and the CU () of a heterogeneous hot stable redundant drone swarm are defined according to (9) based on the structure function of this swarm (45):
where is the probability of the working state of the drones of type and is the probability of CU being in an operational state.
5. Conclusions
The applications of drone swarms (drone fleets) are developed intensively. An essential property in all possible applications is the reliability of the drone swarm as a complex system. In this paper, a survey of investigations in reliability analysis and evaluations of drone swarms are undertaken. Based on this survey, we are able to say that most investigation in reliability analysis is implemented for a single drone. The problem of reliability analysis of drone swarms is not studied sufficiently. In addition, we introduce the background measures (availability/unavailability and importance measures of SI and BI) for the evaluation of drone swarm reliability for some topologies:
- Homogenous irredundant drone swarm;
- Homogenous hot stable redundant drone swarm;
- Heterogeneous irredundant drone swarm;
- Heterogeneous hot stable redundant drone swarm.
Each of these topologies is considered for decentralized and centralized control. The principal indices, availability, unavailability, and importance measures, are introduced for each topology. These considered topologies are the simplest possible topologies of drone swarms (Figure 4). This study should be considered as the first step in the problem of reliability analysis of drone swarms.
Future studies in reliability analysis of drone swarms should be implemented for the definition and calculation of other reliability indices that are not considered in this paper: frequency indices (failure rate, hazard rate, etc.), time indices (MTBF, MTBR, etc.), and others. In this paper, availability and importance measures are considered for drone swarms, which are interpreted as time-independent systems. This interpretation is good for the stable system, but the drone swarm can be considered a dynamic system whose performance can change over time. Studies of drone swarms with time-dependent reliability indices for different topologies should be implemented. These studies should be for both the same and different distribution laws of drone’s lifetimes (Figure 3). The redundancy problem of the reliability evaluation of drone swarms should be developed as well. All these studies should be undertaken based on the introduction in this paper of topologies of drone swarms and their basic evaluation by availability and importance measures of SI and BI. This study and proposed evaluation of considered topologies can be useful in the step of drone swarm design, and for the development and optimization of its topology.
Author Contributions
Conceptualization, E.Z. and V.L.; methodology: E.Z. and N.B.; state-of-the-art, E.Z., V.L. and N.B.; results, R.M. and A.S.; discussion, R.M., A.S. and A.K.; writing—original draft preparation, A.K., R.M. and E.Z.; writing—review and editing, N.B. and A.K.; visualization, A.S.; supervision, E.Z.; project administration, V.L.; funding acquisition, E.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Ministry of Education, Science, Research, and Sport of the Slovak Republic “New approaches of reliability analysis of non-coherent systems” (VEGA 1/0165/21). This research work was realized in the project “Mathematical Models based on Boolean and Multiple-Valued Logics in Risk and Safety Analysis” supported jointly by the Slovak Research and Development Agency (Agentúra na Podporu Výskumu a Vývoja) under the contract no. SK-FR-2019-0003 and by the Delegation for European and International Affairs (Délégation aux affaires européennes et internationales) under the contract PHC (Hubert Curien Partnership) Stefanik no. 45127XL and the Operational Program Integrated Infrastructure 2014–2020 for the project: Intelligent operating and processing systems for UAVs, code ITMS 313011V422, co-financed by the European Regional Development Fund. This research has also been funded by the Committee of Science of the Ministry of Science and Higher Education of the Republic of Kazakhstan, under Grants: AP14869972 “Development and Adaptation of Computer Vision and Machine Learning Methods for Solving Precision Agriculture Problems Using Unmanned Aerial Systems”, Grant BR10965172 «Space monitoring and GIS for quantitative assessment of soil salinity and degradation of agricultural lands in South Kazakhstan», BR18574144 «Development of a Data Mining System for Monitoring Dams and Other Engineering Structures under the Conditions of Man-Made and Natural Impacts».
Data Availability Statement
The dataset used for the findings is included in the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A Review on UAV Wireless Charging: Fundamentals, Applications, Charging Techniques and Standards. IEEE Access 2021, 9, 69235–69266. [Google Scholar] [CrossRef]
- Kumar, A.; Augusto de Jesus Pacheco, D.; Kaushik, K.; Rodrigues, J.J.P.C. Futuristic View of the Internet of Quantum Drones: Review, Challenges and Research Agenda. Veh. Commun. 2022, 36, 100487. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Jiang, D. Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Symagulov, A.; Kuchin, Y.; Zaitseva, E.; Bekbotayeva, A.; Yakunin, K.; Assanov, I.; Levashenko, V.; Popova, Y.; Akzhalova, A.; et al. Review of Some Applications of Unmanned Aerial Vehicles Technology in the Resource-Rich Country. Appl. Sci. 2021, 11, 10171. [Google Scholar] [CrossRef]
- Puchalski, R.; Giernacki, W. UAV Fault Detection Methods, State-of-the-Art. Drones 2022, 6, 330. [Google Scholar] [CrossRef]
- Shelare, S.; Belkhode, P.; Nikam, K.C.; Yelamasetti, B.; Gajbhiye, T. A Payload Based Detail Study on Design and Simulation of Hexacopter Drone. Int. J. Interact. Des. Manuf. (IJIDeM) 2023, in press. [CrossRef]
- Abouelghit, F.A.; Alkady, G.I.; Daoud, R.M.; Amer, H.H.; Adly, I. Motor Failure Detection in FPGA-Based Fault-Tolerant Quadcopters. In Proceedings of the 2020 32nd International Conference on Microelectronics (ICM), Aqaba, Jordan, 14–17 December 2020. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability and Maintenance Analysis of Unmanned Aerial Vehicles. Sensors 2018, 18, 3171. [Google Scholar] [CrossRef]
- Schiestl, M.; Marcolini, F.; Incurvati, M.; Capponi, F.G.; Starz, R.; Caricchi, F.; Rodriguez, A.S.; Wild, L. Development of a High Power Density Drive System for Unmanned Aerial Vehicles. IEEE Trans. Power Electron. 2021, 36, 3159–3171. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Rahiman, W. An Investigation of the Reliability of Different Types of Sensors in the Real-Time Vibration-Based Anomaly Inspection in Drone. Sensors 2022, 22, 6015. [Google Scholar] [CrossRef]
- Hassani, S.; Dackermann, U. A Systematic Review of Advanced Sensor Technologies for Non-Destructive Testing and Structural Health Monitoring. Sensors 2023, 23, 2204. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.-H. Trustworthy Transaction Spreading Using Node Reliability Estimation in IoT Blockchain Networks. Appl. Sci. 2022, 12, 8737. [Google Scholar] [CrossRef]
- Wu, Y.-T.; Qin, Z.; Eizad, A.; Lyu, S.-K. Numerical Investigation of the Mechanical Component Design of a Hexacopter Drone for Real-Time Fine Dust Monitoring. J. Mech. Sci. Technol. 2021, 35, 3101–3111. [Google Scholar] [CrossRef]
- Foreman, V.L.; Favaró, F.M.; Saleh, J.H.; Johnson, C.W. Software in Military Aviation and Drone Mishaps: Analysis and Recommendations for the Investigation Process. Reliab. Eng. Syst. Saf. 2015, 137, 101–111. [Google Scholar] [CrossRef]
- Khan, A.; Ivaki, N.; Madeira, H. Are UAVs’ Flight Controller Software Reliable? In Proceedings of the 2022 IEEE 27th Pacific Rim International Symposium on Dependable Computing (PRDC), Beijing, China, 28 November–1 December 2022. [Google Scholar] [CrossRef]
- Watanabe, K.; Machida, F. Availability Analysis of a Drone System with Proactive Offloading for Software Life-Extension. In Proceedings of the 2022 IEEE International Conference on Omni-layer Intelligent Systems (COINS), Barcelona, Spain, 1–3 August 2022. [Google Scholar] [CrossRef]
- Zhu, X.; Liang, C.; Yin, Z.; Shao, Z.; Liu, M.; Chen, H. A New Hierarchical Software Architecture towards Safety-Critical Aspects of a Drone System. Front. Inf. Technol. Electron. Eng. 2019, 20, 353–362. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef]
- Cai, Z.; Liu, Z.; Kou, L. Reliable UAV Monitoring System Using Deep Learning Approaches. IEEE Trans. Reliab. 2022, 71, 973–983. [Google Scholar] [CrossRef]
- Favarò, F.M.; Saleh, J.H. Application of Temporal Logic for Safety Supervisory Control and Model-Based Hazard Monitoring. Reliab. Eng. Syst. Saf. 2018, 169, 166–178. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability Assessment of UAV Systems. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017. [Google Scholar] [CrossRef]
- Toma, C.; Popa, M.; Iancu, B.; Doinea, M.; Pascu, A.; Ioan-Dutescu, F. Edge Machine Learning for the Automated Decision and Visual Computing of the Robots, IoT Embedded Devices or UAV-Drones. Electronics 2022, 11, 3507. [Google Scholar] [CrossRef]
- Czyża, S.; Szuniewicz, K.; Kowalczyk, K.; Dumalski, A.; Ogrodniczak, M.; Zieleniewicz, Ł. Assessment of Accuracy in Unmanned Aerial Vehicle (UAV) Pose Estimation with the REAL-Time Kinematic (RTK) Method on the Example of DJI Matrice 300 RTK. Sensors 2023, 23, 2092. [Google Scholar] [CrossRef]
- Debus, P.; Rodehorst, V. Multi-Scale Flight Path Planning for UAS Building Inspection. In Lecture Notes in Civil Engineering; Springer: Cham, Switzerland, 2020; pp. 1069–1085. [Google Scholar] [CrossRef]
- Shao, P.-C. Risk Assessment for UAS Logistic Delivery under UAS Traffic Management Environment. Aerospace 2020, 7, 140. [Google Scholar] [CrossRef]
- Ashush, N.; Greenberg, S.; Manor, E.; Ben-Shimol, Y. Unsupervised Drones Swarm Characterization Using RF Signals Analysis and Machine Learning Methods. Sensors 2023, 23, 1589. [Google Scholar] [CrossRef] [PubMed]
- Feuerriegel, S.; Geraldes, R.; Goncalves, A.; Liu, Z.; Prendinger, H. Interface Design for Human-Machine Collaborations in Drone Management. IEEE Access 2021, 9, 107462–107475. [Google Scholar] [CrossRef]
- Sakib, M.N.; Chaspari, T.; Behzadan, A.H. A Feedforward Neural Network for Drone Accident Prediction from Physiological Signals. Smart Sustain. Built Environ. 2021, 11, 1017–1041. [Google Scholar] [CrossRef]
- Pogorzelski, T.; Zielińska, T. Vision Based Navigation Securing the UAV Mission Reliability. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2022; pp. 251–263. [Google Scholar] [CrossRef]
- Xing, L.; Johnson, B.W. Reliability Theory and Practice for Unmanned Aerial Vehicles. IEEE Internet Things J. 2023, 10, 3548–3566. [Google Scholar] [CrossRef]
- Schacht-Rodríguez, R.; Ponsart, J.-C.; García-Beltrán, C.D.; Astorga-Zaragoza, C.M. Prognosis & Health Management for the Prediction of UAV Flight Endurance. IFAC-PapersOnLine 2018, 51, 983–990. [Google Scholar] [CrossRef]
- Dui, H.; Zhang, C.; Bai, G.; Chen, L. Mission Reliability Modeling of UAV Swarm and Its Structure Optimization Based on Importance Measure. Reliab. Eng. Syst. Saf. 2021, 215, 107879. [Google Scholar] [CrossRef]
- Basavaraju, S.; Rangan, V.A.; Rajgopal, S. Unmanned Aerial System (UAS) Hazard Identification, Reliability, Risk Analysis & Range Safety. In Proceedings of the 2019 International Conference on Range Technology (ICORT), Balasore, India, 15–17 February 2019. [Google Scholar] [CrossRef]
- Papakonstantinou, N.; Bashir, A.Z.; O’Halloran, B.; Bossuyt, D.L.V. Early Assessment of Drone Fleet Defence in Depth Capabilities for Mission Success. In Proceedings of the 2019 Annual Reliability and Maintainability Symposium (RAMS), Orlando, FL, USA, 28–31 January 2019. [Google Scholar] [CrossRef]
- Almeida, M.; Hildmann, H.; Solmaz, G. Distributed UAV-swarm-based real-time geomatic data collection under dynamically changing resolution requirements. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 5–12. [Google Scholar] [CrossRef]
- Silva, M.R.; Souza, E.S.; Alsina, P.J.; Leite, D.L.; Morais, M.R.; Pereira, D.S.; Nascimento, L.B.P.; Medeiros, A.A.D.; Junior, F.H.C.; Nogueira, M.B.; et al. Performance Evaluation of Multi-UAV Network Applied to Scanning Rocket Impact Area. Sensors 2019, 19, 4895. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, M.; Dui, H.; Ren, Y.; Sun, B.; Yang, D.; Wang, Z. Importance Measure-Based Phased Mission Reliability and UAV Number Optimization for Swarm. Reliab. Eng. Syst. Saf. 2022, 223, 108478. [Google Scholar] [CrossRef]
- Fesenko, H.; Kharchenko, V.; Zaitseva, E. Evaluating Reliability of a Multi-Fleet with a Reserve Drone Fleet: An Approach and Basic Model. In Proceedings of the 2019 International Conference on Information and Digital Technologies (IDT), Zilina, Slovakia, 25–27 June 2019. [Google Scholar] [CrossRef]
- Tahir, A.; Böling, J.; Haghbayan, M.-H.; Toivonen, H.T.; Plosila, J. Swarms of Unmanned Aerial Vehicles—A Survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Rusnak, P.; Kvassay, M.; Zaitseva, E.; Kharchenko, V.; Fesenko, H. Reliability Assessment of Heterogeneous Drone Fleet With Sliding Redundancy. In Proceedings of the 2019 10th International Conference on Dependable Systems, Services and Technologies (DESSERT), Leeds, UK, 5–7 June 2019. [Google Scholar] [CrossRef]
- Kuo, W.; Zhu, X. Importance Measures in Reliability, Risk, and Optimization; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Coppola, M.; McGuire, K.N.; De Wagter, C.; de Croon, G.C.H.E. A Survey on Swarming With Micro Air Vehicles: Fundamental Challenges and Constraints. Front. Robot. AI 2020, 7, 18. [Google Scholar] [CrossRef] [PubMed]
- Kliushnikov, I.; Kharchenko, V.; Fesenko, H. An Unmanned Aerial Vehicle as a Multi-State System. In Proceedings of the 2022 IEEE 16th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 22–26 February 2022. [Google Scholar] [CrossRef]
- Zaitseva, E.; Levashenko, V.; Kvassay, M.; Kharchenko, V. Reliability Evaluation of Heterogeneous Drone Fleet by Structure Function Based Method. In Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference, Venice, Italy, 1–5 November 2020. [Google Scholar] [CrossRef]
- Zaitseva, E.; Levashenko, V.; Brinzei, N.; Kovalenko, A.; Yelis, M.; Gopejenko, V.; Mukhamediev, R. Reliability Assessment of UAV Fleets. In Emerging Networking in the Digital Transformation Age, Proceedings of the IEEE lnternational Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering, Lviv-Slavske, Ukraine, 22–26 February 2022; Springer: Cham, Switzerland, 2023; pp. 335–357. [Google Scholar] [CrossRef]
- Abdallah, R.; Sarraf, C.; Kouta, R.; Gaber, J.; Wack, M. Communication Failure Analysis for a Fleet Formation Flight of Drones Based on Absorbing Markov Chain. In Safety and Reliability—Safe Societies in a Changing World; CRC Press: Boca Raton, FL, USA, 2018; pp. 2595–2601. [Google Scholar] [CrossRef]
- Morio, J.; Levasseur, B.; Bertrand, S. Drone Ground Impact Footprints with Importance Sampling: Estimation and Sensitivity Analysis. Appl. Sci. 2021, 11, 3871. [Google Scholar] [CrossRef]
- Xu, B.; Liu, T.; Bai, G.; Tao, J.; Zhang, Y.; Fang, Y. A Multistate Network Approach for Reliability Evaluation of Unmanned Swarms by Considering Information Exchange Capacity. Reliab. Eng. Syst. Saf. 2022, 219, 108221. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, Y.; Dui, H. Phased-Mission Reliability and Importance Measure Analysis for Linear and Circular UAV Swarms. Int. J. Math. Eng. Manag. Sci. 2023, 8, 176–193. [Google Scholar] [CrossRef]
- Guo, J.; Wang, L.; Wang, X. A Group Maintenance Method of Drone Swarm Considering System Mission Reliability. Drones 2022, 6, 269. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, Z. Towards a Robust FANET: Distributed Node Importance Estimation-Based Connectivity Maintenance for UAV Swarms. Ad Hoc Netw. 2022, 125, 102734. [Google Scholar] [CrossRef]
- Bai, G.; Li, Y.; Fang, Y.; Zhang, Y.-A.; Tao, J. Network Approach for Resilience Evaluation of a UAV Swarm by Considering Communication Limits. Reliab. Eng. Syst. Saf. 2020, 193, 106602. [Google Scholar] [CrossRef]
- Floriano, B.; Borges, G.A.; Ferreira, H. Planning for Decentralized Formation Flight of UAV Fleets in Uncertain Environments with Dec-POMDP. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar] [CrossRef]
- Yuan, Z.; Jin, J.; Sun, L.; Chin, K.-W.; Muntean, G.-M. Ultra-Reliable IoT Communications with UAVs: A Swarm Use Case. IEEE Commun. Mag. 2018, 56, 90–96. [Google Scholar] [CrossRef]
- Guldenring, J.; Koring, L.; Gorczak, P.; Wietfeld, C. Heterogeneous Multilink Aggregation for Reliable UAV Communication in Maritime Search and Rescue Missions. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019. [Google Scholar] [CrossRef]
- Gupta, R.; Shukla, A.; Mehta, P.; Bhattacharya, P.; Tanwar, S.; Tyagi, S.; Kumar, N. VAHAK: A Blockchain-Based Outdoor Delivery Scheme Using UAV for Healthcare 4.0 Services. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020. [Google Scholar] [CrossRef]
- Patil, R.B.; Al-Dahidi, S.; Newale, S.; Arezki Mellal, M. Reliability Analysis of Centerless Grinding Machine Using Fault Tree Analysis. In Springer Series in Reliability Engineering; Springer: Cham, Switzerland, 2022; pp. 191–211. [Google Scholar] [CrossRef]
- Amari, S.V.; Dill, G. A New Method for Reliability Analysis of Standby Systems. In Proceedings of the 2009 Annual Reliability and Maintainability Symposium, Fort Worth, TX, USA, 26–29 January 2009. [Google Scholar] [CrossRef]
- Tannous, O.; Xing, L.; Rui, P.; Xie, M.; Ng, S.H. Redundancy Allocation for Series-Parallel Warm-Standby Systems. In Proceedings of the 2011 IEEE International Conference on Industrial Engineering and Engineering Management, Singapore, 6–9 December 2011. [Google Scholar] [CrossRef]
- Fesenko, H.; Kharchenko, V. Reliability Models for a Multi-Fleet of Drones with Two-Level Hot Standby Redundancy Considering a Control System Structure. In Proceedings of the 2019 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019. [Google Scholar] [CrossRef]
- Pashchuk, Y.M.; Salnyk, Y.P.; Pashkovskyi, V.V.; Zaiets, Y.H.; Miskiv, V.M.; Shkiliuk, O.P. Method for Structural Optimization of Avionics of Unmanned Aerial Vehicle. Math. Model. Comput. 2020, 7, 373–388. [Google Scholar] [CrossRef]
- Guo, J.; Elsayed, E.A. Reliability of Balanced Multi-Level Unmanned Aerial Vehicles. Comput. Oper. Res. 2019, 106, 1–13. [Google Scholar] [CrossRef]
- Alshaibani, W.T.; Shayea, I.; Caglar, R.; Din, J.; Daradkeh, Y.I. Mobility Management of Unmanned Aerial Vehicles in Ultra–Dense Heterogeneous Networks. Sensors 2022, 22, 6013. [Google Scholar] [CrossRef]
- Shirey, R.; Rao, S.; Sundaram, S. Chimera: Exploiting UAS Flight Path Information to Optimize Heterogeneous Data Transmission. In Proceedings of the 2021 IEEE 29th International Conference on Network Protocols (ICNP), Dallas, TX, USA, 1–5 November 2021. [Google Scholar] [CrossRef]
- Osmic, N.; Tahirbegovic, A.; Tahirovic, A.; Bogdan, S. Failure Mode and Effects Analysis for Large Scale Multirotor Unmanned Aerial Vehicle Controlled by Moving Mass System. In Proceedings of the 2018 IEEE International Systems Engineering Symposium (ISSE), Rome, Italy, 1–3 October 2018. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Straub, J. Anti-Drone Capabilities: Using a Quality Assurance Technology to Identify Exploitable UAV Weaknesses. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021. [Google Scholar] [CrossRef]
- Walker, M.G. Next Generation Prognostics and Health Management for Unmanned Aircraft. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010. [Google Scholar] [CrossRef]
- Dingeldein, L. Simulation Framework for Real-Time PHM Applications in a System-of-Systems Environment. Aerospace 2023, 10, 58. [Google Scholar] [CrossRef]
- Paixao de Medeiros, I.; Ramos Rodrigues, L.; Strottmann Kern, C.; Duarte Coelho dos Santos, R.; Hideiti Shiguemori, E. Integrated Task Assignment and Maintenance Recommendation Based on System Architecture and PHM Information for UAVs. In Proceedings of the 2015 Annual IEEE Systems Conference (SysCon) Proceedings, Vancouver, BC, Canada, 13–16 April 2015. [Google Scholar] [CrossRef]
- Fan, H.; Fang, H.; Dong, Y.; Shi, H.; Ren, S. UAV Engine Fault and Diagnosis with Parameter Models Based on Telemetry Data. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017. [Google Scholar] [CrossRef]
- Barlow, R.E.; Proschan, F. Statistical Theory of Reliability and Life Testing; Holt, Rinehart and Winston: New York, NY, USA, 1975. [Google Scholar]
- Akers, S.B. Binary Decision Diagrams. IEEE Trans. Comput. 1978, C–27, 509–516. [Google Scholar] [CrossRef]
- Ibáñez-Llano, C.; Rauzy, A.; Meléndez, E.; Nieto, F. Hybrid Approach for the Assessment of PSA Models by Means of Binary Decision Diagrams. Reliab. Eng. Syst. Saf. 2010, 95, 1076–1092. [Google Scholar] [CrossRef]
- Rauzy, A.; Yang, L. Decision Diagram Algorithms to Extract Minimal Cutsets of Finite Degradation Models. Information 2019, 10, 368. [Google Scholar] [CrossRef]
- Reay, K.A.; Andrews, J.D. A Fault Tree Analysis Strategy Using Binary Decision Diagrams. Reliab. Eng. Syst. Saf. 2002, 78, 45–56. [Google Scholar] [CrossRef]
- Fesenko, H.; Kharchenko, V.; Bardis, N.; Kor, A.-L.; Brezhniev, Y. Drone Fleet Survivability Evaluation Based on Lanchester’s Modified Deterministic Model. Int. J. Circuits Syst. Signal Process. 2020, 14, 775–781. [Google Scholar] [CrossRef]
- Brînzei, N.; Aubry, J.-F. Graphs Models and Algorithms for Reliability Assessment of Coherent and Non-Coherent Systems. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2018, 232, 201–215. [Google Scholar] [CrossRef]
- Schneeweiss, W.G. A Short Boolean Derivation of Mean Failure Frequency for Any (Also Non-Coherent) System. Reliab. Eng. Syst. Saf. 2009, 94, 1363–1367. [Google Scholar] [CrossRef]
- Zhai, Q.; Xing, L.; Peng, R.; Yang, J. Aggregated Combinatorial Reliability Model for Non-Repairable Parallel Phased-Mission Systems. Reliab. Eng. Syst. Saf. 2018, 176, 242–250. [Google Scholar] [CrossRef]
- Zaitseva, E.; Levashenko, V.; Kostolny, J. Importance Analysis Based on Logical Differential Calculus and Binary Decision Diagram. Reliab. Eng. Syst. Saf. 2015, 138, 135–144. [Google Scholar] [CrossRef]
- Steinbach, B.; Posthoff, C. Boolean Differential Equations; Springer: Cham, Switzerland, 2013; pp. 49–127. [Google Scholar] [CrossRef]
- Armstrong, M.J. Joint Reliability-Importance of Components. IEEE Trans. Reliab. 1995, 44, 408–412. [Google Scholar] [CrossRef]
- Heidtmann, K.D. Improved Method of Inclusion-Exclusion Applied to k-out-of-n Systems. IEEE Trans. Reliab. 1982, R-31, 36–40. [Google Scholar] [CrossRef]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).