1. Introduction
As the requirement for complex and sophisticated modeling of structural systems has increased continuously, demands efficient surrogate models have also increased since they can provide accurate and reliable solutions to various problems of interest in a timely fashion. Particularly, reduced-order models (ROM) derived from the original full-order model (FOM) guarantee more robust input-output relations than pure data-fit approaches [
1,
2]. Therefore, ROMs are frequently used when we face time-critical applications that also require a certain level of accuracy.
Most of the model order reduction techniques rely on the projection of the FOM to a subspace containing the physical properties of a given system. For linear, time-invariant dynamical systems, eigenmodes from mass and stiffness matrices can be a projector that transforms FOM to a generalized coordinate system of a subspace. In this case, a linear combination of the portion of the column-wise projection matrix and the unknown variable can describe the approximated behavior of the system. Thus, the main characteristic of the ROM is determined by that of the reduced-order basis (ROB, i.e., projection matrix). Several approaches have been popularly used for analyzing complicated dynamical systems [
3,
4,
5]. Recently, the ROMs for dynamic systems are extending their scalabilities by combining with data-driven approaches in a non-intrusive manner showing efficient approximations for the behavior of complex systems [
6,
7], retaining selected physical information [
8], computing structural responses including sensitivities [
9], and can be extended to various engineering disciplines including acoustic-structural multiphysics problems [
10].
One fundamental property to be addressed in this research is that most ROBs transform FOM into generalized coordinate systems. As a result, a recovery process is mandatory for the approximation of the FOM. If the ROB is derived considering the relationship between each degree of freedom in physical coordinates, the reduced variable can present the same property in the physical domain. We refer to such methods as the degree of freedom-based reduced-order model [
11,
12], also known as a static (or dynamic) condensation [
13,
14]. Research on DOF-based ROM is relatively less active than those on mode-based ROM due to the convenience of constructing ROBs in generalized coordinates. However, because the physical DOF of the ROM can be synchronized with the actual sensor location directly, DOF-based ROM can be a powerful tool, particularly when we consider data acquisition-based modeling and simulations [
15], system identification based on sensor data [
16], model updating techniques and experiments [
17], and so on. Meanwhile, for transformation between reduced variables in modal coordinates and those in physical coordinates, the SEREP method [
18] can be applied by dividing ROM into parts of master and slave DOF with pseudo-inverse of the partitioned ROB. Thus, one can acquire the advantage of DOF-based ROM even when using ROB of generalized coordinates.
Another motivation of the present research is that most ROBs are not adaptive to parameters of interest such as the frequency in this research. Usually, various physical properties such as geometric and material properties, initial and boundary conditions, loading conditions, and uncertainties are system parameters. Thus, to efficiently approximate output quantities of interest into input parameter change, various research has been performed within the parametric reduced-order model (PROM) framework. There are several approaches for considering parametric variations, including using global ROBs [
19,
20,
21], manifold interpolation-based approaches [
22,
23,
24], perturbation-based methods [
25,
26], introducing domain decomposition methods [
27,
28,
29] or Sherman-Morrison-Woodbury formula [
30], using conventional interpolations, or enhanced interpolation scheme [
31,
32] and so on. The basic procedure of the PROM is decomposing the system or the ROB into parameter-dependent and -independent terms. Parameter-dependent terms can be either a basis of a function space or a weighting function. Parameter-independent terms are data acquired from multiple offline simulations or parts derived by extracting parameter-dependent terms from original matrices during the modeling procedure. By a linear combination of the two terms, ROB can be adapted to the new input value of the parameter.
On the other hand, the Krylov subspace method and Padé approximation method [
33,
34,
35,
36,
37] have been used in a similar context with PROM, one of the most popular methods for frequency sweep analysis. The methods approximate frequency responses by deriving the coefficient of the interpolation function from the differentiation of the governing equation at the upper and lower bounds of the frequency range of interest. Results show that interpolatory ROM is efficient with an ability to adaptively control accuracy by adding more sample points.
In the present work, localization of the ROB with an adaptive frequency sampling strategy was proposed within the framework of dynamic condensation. Specifically, multiple transformations and associated ROMs were constructed from several sampling frequency instances. Sampling ranges were adaptively refined considering the difference between two adjacent ROMs. Previously, dynamic condensation considering the dependency of the ROB on the frequency and its variants has been introduced in the literature [
13,
15]. However, performing an inversion of a dynamic stiffness matrix corresponding to parts of the slave DOF at every frequency is neither efficient nor appropriate. In general, the number of master DOFs is much less than that of slave DOFs since there are limited sensors in a real situation. Thus, the inverse of the dynamic stiffness of the slave DOF is not as efficient as that of a full system matrix. This computational burden can be relieved by constructing multiple ROMs at sample frequencies and using them depending on a new input frequency. For such an offline-online procedure, the offline phase should not be overridden, as multiple high-fidelity simulations require significant computational resources. Thus, an efficient sampling strategy should also guarantee a certain level of accuracy. The key advantage of the frequency sampling method proposed in this paper is that it can select a new frequency sample by computing the difference between two responses obtained by two adjacent local ROMs. Such an adaptive procedure also provides the error of the constructed ROM, which is considered for an efficient frequency response analysis.
This paper is organized as follows: In
Section 2, a mathematical formulation of the dynamic condensation procedure is revisited and a new algorithm for adaptive frequency sampling is proposed.
Section 3 presents numerical examples for validating the accuracy and efficiency of the proposed method. In
Section 4, conclusions and suggestions for future research topics are provided.
2. Mathematical Formulation
2.1. Frequency Response Analysis Based on Dynamic Condensation
We investigate a steady-state, time-harmonic response of a structural system. Let
be an angular frequency and
be a bounded set in a frequency domain such that
where
, and subscripts
and
are the lower and upper bounds of the frequency range of interest, respectively. Following previous expressions [
33,
35], the frequency response function of a spatially discretized matrix form of a finite element formulation can be written as follows:
where
,
, and
are the mass, damping, and stiffness matrices, respectively,
represents the total degree of freedom of the system, and
is the imaginary number. The displacement vector and structural force input vector are
and
, respectively.
represents an impedance matrix. Solving Equation (2) gives the frequency response of the system.
In the present study, we neglected the damping of the system without losing the generality of the proposed method. Previous research [
38,
39] has shown that even though we consider damping of the system resulting in a complex ROB matrix, the basic procedure of constructing ROM does not change, which is projecting high-dimensional field variables into low-dimensional space. Hence, the response vector is obtained as follows:
In Equation (3), the response vector is the function of a frequency. In the rest of the paper, the dependency of with respect to the frequency will be omitted since is an output depending on the change of frequency.
As presented in the literature [
11,
13,
14], deriving DOF-based ROM starts by dividing the degrees of freedom of a given system into master and slave ones such that
where subscripts
m and
s denote master and slave DOFs, respectively. Using the notation of the subscript,
. Displacement vectors are
and
, where
and
represent numbers of DOFs of slave and master ones, respectively. In general,
. Considering that DOF-based ROM can synchronize responses of the master DOF with sensor responses in actual structures,
is usually determined by the number of sensors, which finally determines the size of the ROM. The relationship between master and slave DOF is derived from the lower part of Equation (4) as follows:
Consequently, displacement of the slave DOF can be expressed by the linear combination of the transformation matrix and the master DOF with a forcing term to the slave DOF as follows:
where
is defined as
Substituting Equation (6) into the upper part of Equation (4) results in a ROM with an unknown vector displacement of master DOF such that
where
For numerical frequency sweeping simulation, discrete frequency instances are selected in
. Let the
th frequency instance be
, a set of discrete frequencies is defined as follows:
where
. Thus, dynamic condensation is derived from the transformation matrix defined by
. Successively the dynamic ROM by the Galerkin projection of Equation (3) using Equation (7) is obtained as follows:
where
In Equation (12), system matrices and frequency are expressed explicitly without using the impedance matrix. From a computational point of view, the transformation matrix is computed at . Using Equations (13) and (14), reduced matrices are obtained. Successively, the final frequency response is obtained using Equation (12).
2.2. Multiple Local ROMs at Sample Frequencies
For the conventional dynamic reduction method, transformation and reduced matrices and are constructed whenever the frequency changes, which increases computational cost due to the inversion of the impedance matrix with a size of . In this work. the framework of surrogate modeling is introduced, which builds multiple model surrogates in the offline stage and computes a response with a new input frequency in the online stage. In other words, dynamic ROMs are localized by solving high-fidelity models at several frequency instances in the offline phase, and near, real-time responses are obtained by solving local ROMs in the online stage.
A set of frequency samples are first defined in a bounded range as follows:
The subscript
denotes the
th range in
with
. The union of each set becomes
. Therefore,
and
. The
th local ROM covers the frequency range in
. It will be constructed in the middle point in
, which is
where upper and lower bounds of the
th range are determined by the algorithm including an error estimation, which will be presented in the following section.
The middle point
becomes the
th sample frequency. Thus, the local ROM is constructed. Its response is computed as follows:
where the system matrices are expressed using the notation without the upper bar,
since system matrices are always evaluated at the sampling frequency. Additionally, note that the response vector
is an approximation except for
, as the ROM is constructed using a local ROB,
.
Remark 1. For the 1st and the th ranges, upper and lower bounds become sample frequencies. For example, and . Thus, local ROMs at lower and upper bounds cover only the upper and lower half of each local range, respectively.
Remark 2. In the offline stage, , , and are constructed and saved. As a single reduced matrix contains only elements and the number of samples is adaptively determined by satisfying , the proposed method does not require much memory for saving ROMs, which is also beneficial for efficient computation in the online stage.
2.3. A New Adaptive Sampling Method and Construction of Local ROMs
Once displacement vectors are computed from local ROMs, the final response is obtained simply by stacking each vector in
. However, as the local frequency range is set as defined in Equation (8), upper and lower bounds of adjacent range overlap with each, for example,
. There exists a gap between displacement vectors obtained at these bounds. In other words, approximated displacements from two adjacent ROMs at a single frequency are not the same since the approximation accuracy decreases if the difference between input and sampling frequencies increases. Let
, then the difference can be written as follows:
Thus, if the difference is greater than a specific criterion, another dynamic ROM is constructed at the point and the range that local ROM needs to be covered becomes narrow. This is a key idea of the new adaptive sampling method proposed in this paper.
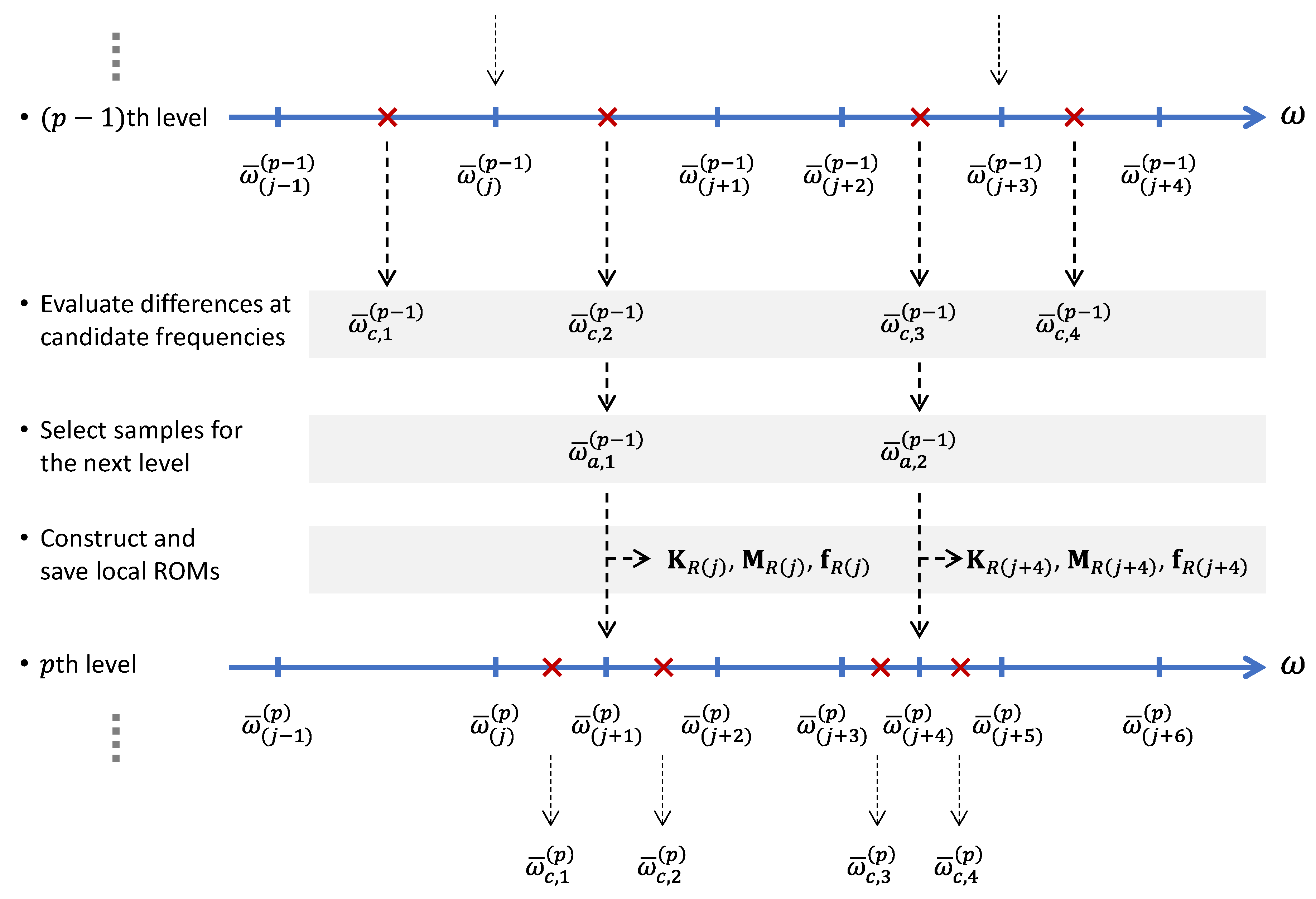
In the proposed method, the first set of sample frequencies is determined by the user. The next sample set then becomes the union of the first set and additional samples. Let the
th set of sample frequencies be
, then elements within the domain of interest can be expressed as follows:
where the superscript
is used to designate the level of sampling, and
denotes the number of frequency samples in the
th level. Although every mid-point of two adjacent samples should be evaluated for
, only selected ranges where new samples have been added in the previous level are divided if
. Let
be the
th candidate frequency to be evaluated in the
th range, which is expressed as follows:
As illustrated in
Figure 1, there is no relationship between the candidate number
and the range number,
. Thus, a mapping of indices is required to designate the position of the candidate and adjacent samples, for example,
, where
. Once candidate frequencies on the
th level are determined, displacement vectors associated with candidates can be calculated using two adjacent local ROMs such that
If the
in Equation (19) satisfies the criteria, for example,
,
is not chosen as a new sample. Otherwise, the associated local ROM at
is constructed as a new sample at the
th level. The overall process of selecting sample frequency and constructing local ROMs is presented in Algorithm 1, where the number of candidate frequencies and selected frequencies to be added to the next level are denoted by
and
, respectively, and the set associated with selected frequencies is represented by
. Thus, the number of elements is defined by the cardinality as
. In fact, the numbers of candidates and selections have the following relationships except for
such that
| Algorithm 1 Adaptive Frequency Sampling and Local ROM Construction. |
- 1:
Define a set of frequency samples, as in Equation (20) - 2:
- 3:
- 4:
for , do - 5:
Compute and , , - 6:
Compute as in Equation (18) - 7:
end for - 8:
Compute candidate frequencies, , where - 9:
Construct a mapping from the index to as, - 10:
- 11:
while (1), do - 12:
, - 13:
for , do - 14:
Compute and at as in (22) and (23) with - 15:
if - 16:
, and map the indices, - 17:
- 18:
- 19:
end if - 20:
end for - 21:
if - 22:
break - 23:
else - 24:
- 25:
for , do - 26:
Compute and , , - 27:
Compute as in Equation (18). - 28:
and with - 29:
end for - 30:
Construct a mapping from the index to as, - 31:
- 32:
- 33:
- 34:
- 35:
end if - 36:
end while
|
Remark 3. If we use uniform samples initially, which is not necessarily for the proposed method, the th level candidate covers ranges.
Remark 4. The relationship between tolerance and efficiency was not explicitly revealed in this study. As accuracy is also affected by the selection of the master DOF, tolerance-efficiency tradeoffs need to be further determined in the future.
2.4. Frequency Response Analysis in the Online Phase
In the online phase, local ROMs are recalled depending on the frequency input. Assume that local ROMs satisfy the tolerance at all-sample frequencies on the
th level, then sets of frequency ranges can be expressed as follows:
where
. Sample frequency also satisfies
with
. Finally, frequency responses in
are obtained using Equation (18).
Once all local responses corresponding to master DOFs are obtained, responses at the boundaries of sets need to be handled. Considering that each range overlaps with others, two distinct displacement vectors are obtained despite their difference being lower than the tolerance. In fact, a vector from either the upper or lower range can be selected for efficiency. Otherwise, the two vectors are simply averaged, increasing the accuracy of displacement at boundaries as follows:
Since reduced vectors represent a physical displacement for the DOF-based ROM, direct superposition of two vectors is possible unlike, for example, variables in the generalized coordinate system.
4. Conclusions
In this paper, a new frequency sampling algorithm was proposed within a framework of dynamic condensation-based reduced-order modeling. As the frequency response obtained by using DOF-based ROM does not need to be recovered, the efficiency in the online phase is guaranteed. Nevertheless, since the ROB becomes a function of frequency, implementing a global ROB that is applicable to the whole frequency range of interest is limited. Therefore, localizing the ROB and constructing multiple ROMs are suitable solutions for frequency response analysis of a large-scale structural system. Such a ROM construction process is regarded to be an offline stage where data are obtained by solving a full-scale, high-fidelity model in general. After that, responses are approximated using local ROMs in the online stage.
The proposed method was successfully applied to both offline and online stages. First, the evaluation of offline sampling was adaptively handled by estimating differences in responses computed at each sample point. In addition, an approximation of frequency response was efficiently performed in the online stage using local ROMs. Different from conventional ROMs that project the displacement vector into a generalized coordinate system, the reduced displacement vector of the proposed dynamic condensation-based method is in physical coordinates. Therefore, responses computed by local ROMs were directly stacked up, showing a possibility of real-time evaluation without additional treatments. Since the proposed method proved its efficiency and capability of adjusting accuracy within the offline-online framework, parametric variations such as initial, boundary, and loading conditions, material, and geometric properties of the system can be considered for future investigation. In fact, since the proposed method only considered frequency as an input parameter, the ROB needs to be changed in the form of a parametric reduced-order modeling method to take various parameters into account. Therefore, enhancing the proposed algorithm from a parametric modeling viewpoint is a desirable topic. Additionally, extending the proposed method to consider proportional and nonproportional damping effects is expected to develop efficient approximation in frequency sweeping of acoustic-structural combined analysis.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}