Abstract
In this paper, we introduce some classes of univalent harmonic functions with respect to the symmetric conjugate points by means of subordination, the analytic parts of which are reciprocal starlike (or convex) functions. Further, we discuss the geometric properties of the classes, such as the integral expression, coefficient estimation, distortion theorem, Jacobian estimation, growth estimates, and covering theorem.
MSC:
30C65; 30C45
1. Introduction
Define as a class of analytic functions of the form
where : .
Let , and be the subclasses of , which are composed of univalent functions, starlike functions, and convex functions, respectively [1,2].
Let denote the class of analytic functions of the following form:
The function is called a Carathéodory function.
Suppose that the functions and are analytic in . The function is said to be subordinate to the function if there exists a function satisfying , such that . Note that . In particular, if is univalent in , the following conclusion follows (see [1]):
In 1994, Ma and Minda [3] introduced the classes and of starlike functions and convex functions by using subordination. The function iff and the function iff , where and .
Let and . The classes and are the classes of Janowski starlike and convex functions, respectively (refer to [4]). and are known for the classes of starlike and convex functions, respectively.
In 1959, Sakaguchi [5] introduced the class of starlike functions with respect to symmetric points. The function if and only if
In 1987, El Ashwah and Thomas [6] introduced the classes and of starlike functions with respect to conjugate points and symmetric conjugate points as follows:
Similarly to the previous section, the classes and can be further generalized to the classes and .
The function belongs to if and only if holds true, and belongs to if and only if holds true, where and .
If the function meets the following criteria——then is said to be in the class of the reciprocal starlike functions of order , which is represented by .
In contrast to the classical starlike function class of order , the reciprocal starlike function class of order maps the unit disk to a starlike region within a disk with as the center and as the radius [7]. In particular, the disk is large when . Therefore, the study of the class of reciprocal starlike functions has aroused the research interest of most scholars [8,9,10,11,12,13]. In 2012, Sun et al. [8] extended the reciprocal starlike function to the class of the meromorphic univalent function.
As a generalization of the analytic function, the harmonic function has become one of the key branches in complex analysis because of the study of the minimal surface of parameters in differential geometry. After more than 20 years of development, harmonic function theory has been widely used in fluid dynamics, mathematical physics equations, and image processing, and it is also a powerful tool for studying minimal surfaces in differential geometry.
For the analytic functions and , let be a class of harmonic mappings that has the following form (see [14,15,16,17,18,19]):
where
Specifically, is referred to as the analytical part, and is known as the co-analytic part of f.
It is known that the function is locally univalent and sense-preserving in if and only if (see [20]).
Based on these results, it is possible to obtain the geometric properties of the co-analytic part by means of the analytic part of the harmonic function.
In the last few years, different subclasses of have been studied by several authors.
In 2007, Klimek and Michalski [21] investigated the subclass with .
In 2014, Hotta and Michalski [22] investigated the subclass with .
In 2015, Zhu and Huang [23] investigated the subclasses of with and .
Combined with the above studies, by using the subordination relationship, this paper further constructs the reciprocal-structure harmonic function class with symmetric conjugate points as follows.
Definition 1.
Let be in the class of the Form (4) and let . We define the class as that of univalent harmonic reciprocal starlike functions with a symmetric conjugate point; the function if and only if , that is,
In addition, let define the class of harmonic univalent reciprocal convex functions with a symmetric conjugate point. The function if and only if , that is,
In this paper, we discuss the geometric properties of these classes, such as the integral expression, coefficient estimation, distortion theorem, Jacobian estimation, growth estimate, and covering theorem. In order to show the geometric properties of the function more intuitively, we give the corresponding function image. The conclusion has enriched the field of research on harmonic functions.
2. Preliminary Preparation
To obtain our results, we need the following Lemmas.
Lemma 1
([24]). Let γ be a complex number. If the function is analytic in , satisfies , and is of the form , then
and
According to the subordination relationship, we get the integral expression of the classes and as follows.
Lemma 2.
Let .
- (1)
- If thenwhereand ϖ is analytic in , satisfying .
- (2)
- If thenwhere is given by (8) and ϖ is analytic in , satisfying .
Proof.
Let belong to the class . According to Definition 1 and the subordination principle, there exists an analytic function in that satisfies such that
By replacing z in (9) with , we get
By combining (9) and (10), the following formula can be established:
We integrate both sides of Equation (11) and make a simple calculation to get the following result:
From (9) and (12), we have
We integrate both sides of Equation (13) again, and we get
According to (7), we have if and only if . So, we can easily get (8). □
Lemma 3.
Let and .
- (1)
- If thenandIn particular, and .The estimate is sharp if
- (2)
- If thenandwhereIn particular, and .The estimate is sharp ifIn particular, if and , we get the following conclusion.
- (1)
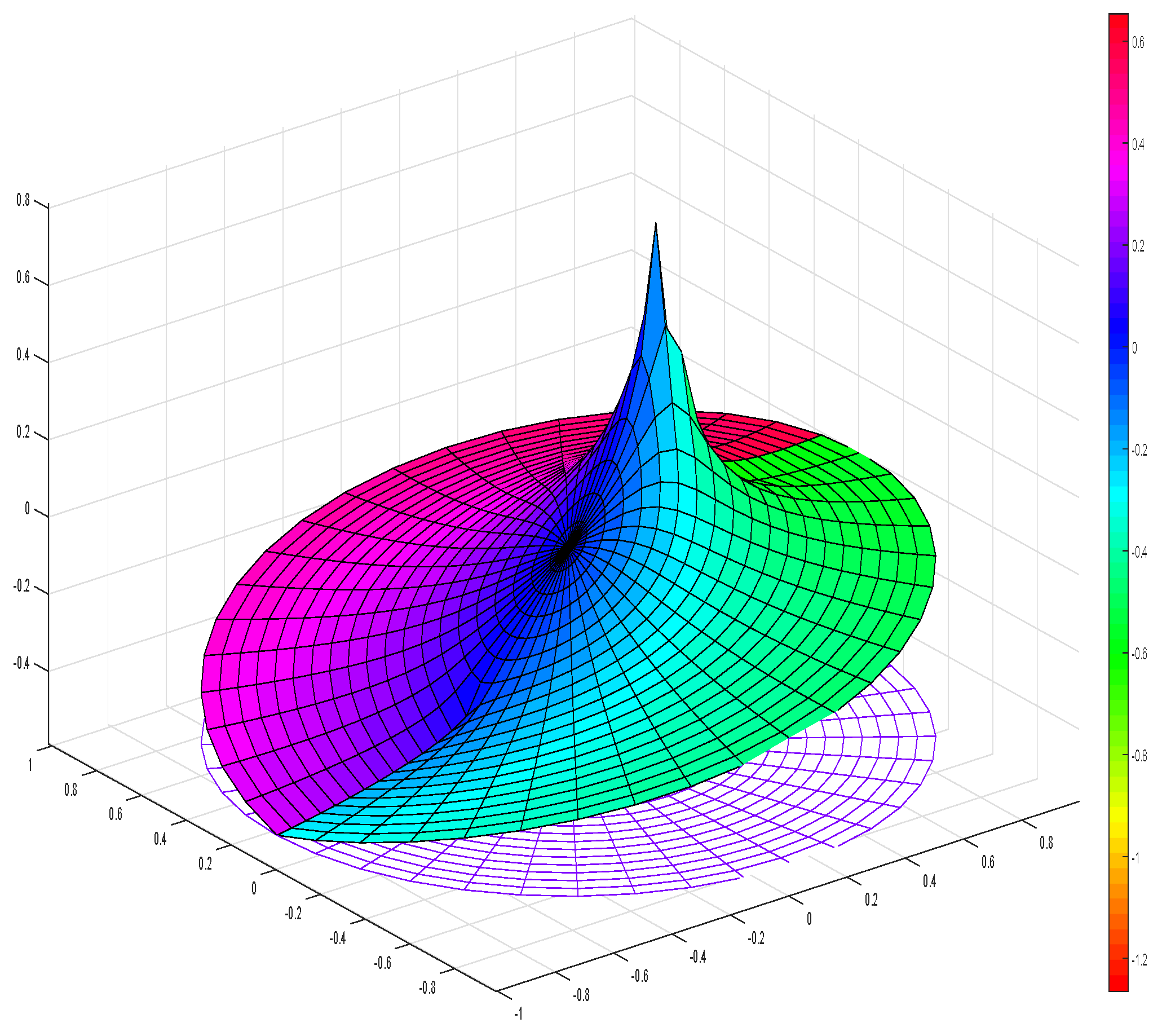
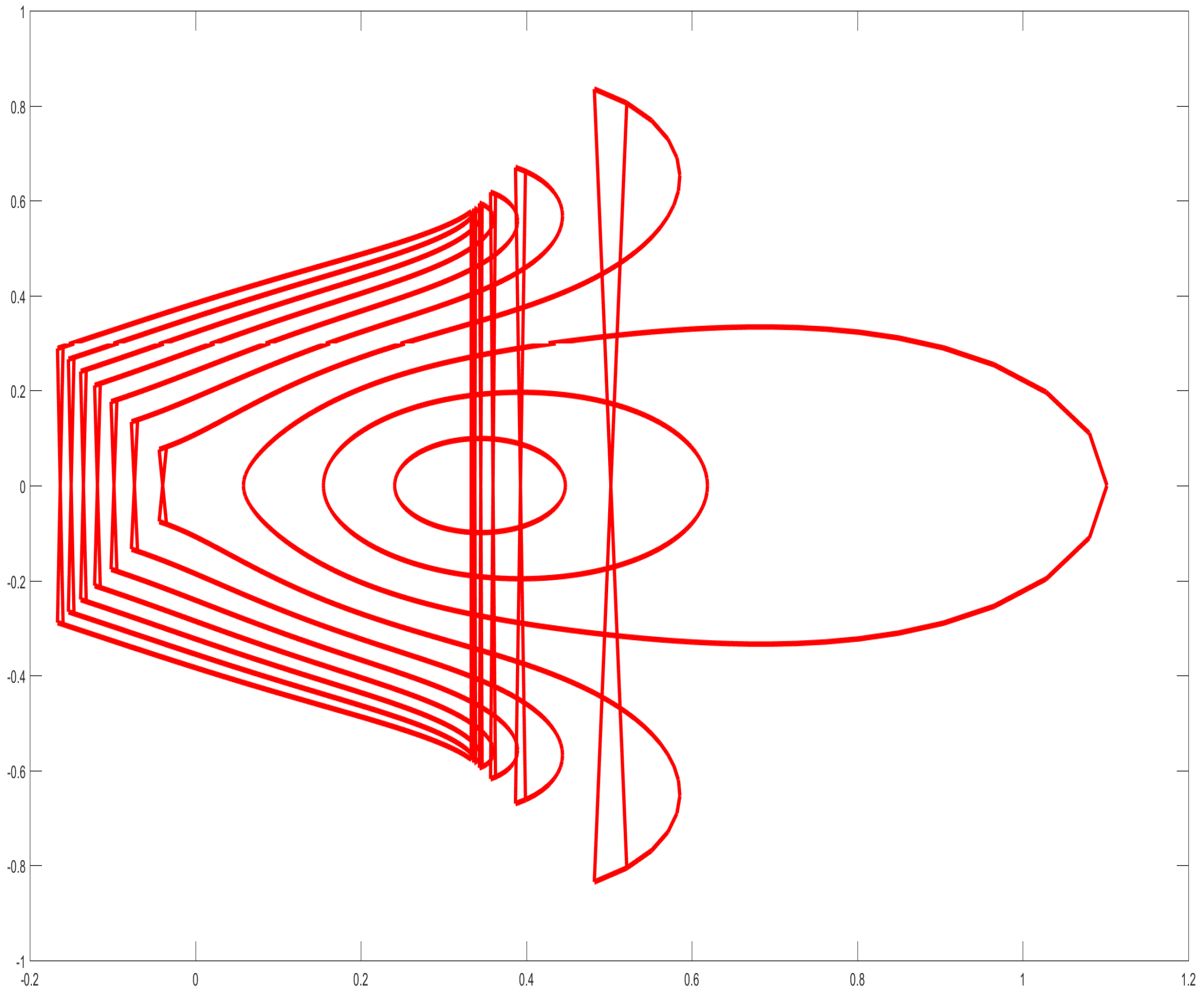
- If thenThe estimate is sharp if , and a graph of this function is shown in Figure 1. In the figure, the complex function is represented by the three-dimensional coordinate system plus color; the -axis represents the real part of the variable z; the -axis represents the imaginary part of the variable z; the -axis represents the real part of the function , and the color represents the imaginary part of the function . In Figure 2, the range of the function is shown, with the -axis representing the real part of the function and the -axis representing the imaginary part of the function .
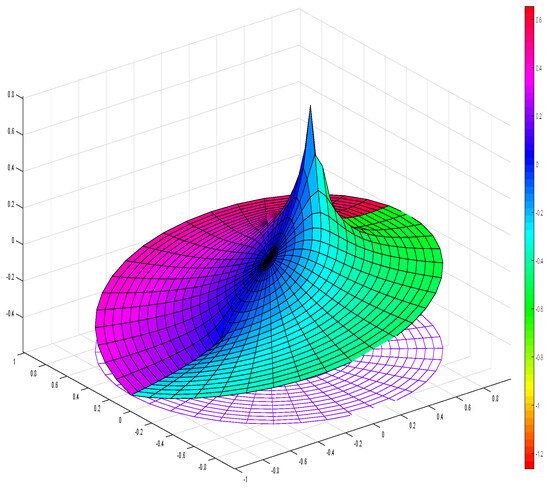 Figure 1. The graph of .
Figure 1. The graph of .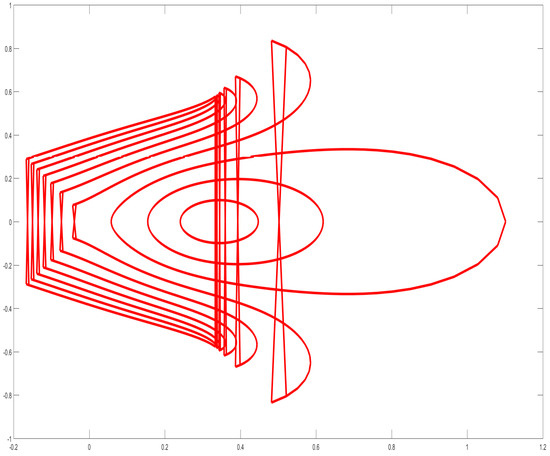 Figure 2. The range of .
Figure 2. The range of . - (2)
- If thenThe estimate is sharp if
Proof.
First, we prove the first part of Lemma 3. Let , and there exists a positive real function with that satisfies the following condition:
By comparing the coefficients of the two sides of the equation, the following conclusions are drawn:
and
It is easy to prove that
and
From (19) and (20), we have
and
According to (19)–(22), we can obtain (14) and (15), that is,
and
The second part of Lemma 3 is shown below. Let . Similarly to the previous proof, we can obtain
where is a positive real function with .
By comparing the coefficients of the two sides of the equation, we can get the following results:
It is easy to see that
and
From (23) and (24), we have
and
According to (23)–(26), we can obtain (16) and (17), that is,
and
□
Lemma 4.
Let .
- (1)
- If , thenThe estimate is sharp ifor
- (2)
- If , thenThe estimate is sharp iforIn particular, if , we have the following results:
- (1)
- If , thenThe estimate is sharp if or .
- (2)
- If , thenThe estimate is sharp if or .
Proof.
Let . According to Definition 1 and the subordination principle, there exists an analytic function in that satisfies such that
By comparing the coefficients of the two sides of Equation (29), we get the following results:
Therefore, we have
Applying Lemma 1, we get (27). The extremal function is as follows:
or
If , then . It is easy to obtain (28), and the bound is sharp, as shown in the following:
or
□
Lemma 5.
Let and .
- (1)
- If , thenand
- (2)
- If , thenandwhere
Proof.
For , we let
After a simple calculation, we can get
Therefore,
Substituting , we obtain
Letting and , we get
It is easy to find that is decreasing with respect to . Therefore,
that is,
Integrating the two sides of the inequality for t above from 0 to 1, we get
and
By combining inequalities (40)–(42), we can obtain (30) from Lemma 5.
On the other hand, for , we have
From (41)–(43), we can obtain (31) from Lemma 5.
If , then . According to the results in (30), we can easily get (33), that is,
By integrating the two sides of the inequality from 0 to r, we can get (32). □
Lemma 6.
If , then .
Proof.
For convenience, we set and .
Let . According to Definition 1 and the relationship of subordination, we have
that is,
where is analytic in and satisfies and .
Let , and we have . Thus, we get
that is,
Since
we have
which is equivalent to
where .
Since , by combining this with the conclusion above, we get
that is, .
Thus, we complete the proof of Lemma 6. □
Lemma 7.
If , then .
Proof.
Similarly to the proof of Lemma 6, let and .
If , according to Definition 1 and the relationship of subordination, we have
where . Thus, we get
Since
we have
where .
Since , by combining this with the above conclusion, we get
that is, .
Thus, we complete the proof of Lemma 7. □
Lemma 8.
Let and .
- (1)
- If , then
- (2)
- If , thenwhere , and are given by (34), (35), (36), and (37) respectively.
Proof.
(1) Suppose that ; then, we get
According to Lemma 5 and Lemma 6, we have
Equation (44) can be obtained by combining Equations (46) and (47).
- (2)
- Suppose that ; then, we getAccording to Lemma 5 and Lemma 7, we haveWith (48) and (49), we can obtainBy integrating the two sides of inequality (50) about r, we can get (45) after a simple calculation. □
3. Main Results
First, we get the integral expression for functions of these classes as follows.
Theorem 1.
If , then we have
where
and ω and ϖ are analytic in and satisfy .
Proof.
Suppose that . According to Definition 1 and the relationship of the analytic part and the co-analytic part of the harmonic function, we have
where satisfies and .
By using Lemma 2, we get
From (53) and (54), we obtain
Therefore, we get the result of (51). □
Similarly to the proof of Theorem 1, we can get the integral expression of the function in the class as follows.
Theorem 2.
Let ; then, we have
where is given in (52), and ω and ϖ are analytic in and satisfy .
Next, we will get the coefficient estimates for the function classes and .
Theorem 3.
Let , where σ and τ are given by (4).
- (1)
- If , thenandThe above estimates are sharp, and the extremal function is.
- (2)
- If , thenandwhere is given by (18).The estimates are sharp, and the extremal function is.
Proof.
According to Definition 1 and the relationship of the analytic part and the co-analytic part of the harmonic function, there exists an analytic function of the form in that satisfies such that
where and are given by (4).
By comparing the coefficients on both sides of the above equation, we get
and
It is easy to show that
and
Since , with Lemma 1, it is easy to find that . Therefore,
and
According to Lemma 3, (63), and (64), with a simple calculation, we can get (57)–(60). Thus, the proof is complete. □
In particular, by letting , we can obtain the following result.
Corollary 1.
Let be of the Form (4).
- (1)
- If , thenandThe above estimates are sharp, and the extremal function is as follows:
- (2)
- If , thenandThe above estimates are sharp, and the extremal function is as follows:
By applying Theorem 3, we arrive at the following conclusion.
Theorem 4.
Let be of the Form (4), .
- (1)
- If , thenand
- (2)
- If , thenandwhere is given by (18).
Proof.
Let be of the Form (4). By using the relation , (59), and (60), we have
and
According to Lemma 1, we have
and
According to (14), (15), (25), and (26) of Lemma 4, we can complete the proof of part (1) of Theorem 4.
Similarly to the previous proof, let be of the Form (4). According to (16), (17), (25), and (26) from Lemma 4, we can complete the proof of part (2) of Theorem 4. □
In particular, if we set and , we get the following result.
Corollary 2.
Let be of the Form (4) for .
(1) If , then
and
(2) If , then
and
where .
Theorem 5.
Let .
- (1)
- If , thenIn particular, let ; then, we have
- (2)
- If , thenIn particular, let ; then, we havewhere are given by (34), (35), (36), and (37), respectively.
Proof.
According to the relation , it is not hard to see that there is such that (see [25]):
namely,
From (82), it is easy to find that
By combining (83) and (44), we get (77). Similarly, combining (83) and (45) gives (80). So, the proof is complete. □
By using the same method as that used in the proof of Lemma 5, the following results are easily obtained.
Theorem 6.
Let .
- (1)
- If , thenIn particular, let for ; then, we get
- (2)
- If , thenIn particular, let for ; then, we getwhere are given by (34), (35), (36), and (37), respectively.
Below, we show how we can obtain the Jacobian estimate and growth estimate of f.
Theorem 7.
Let .
- (1)
- If , then
- (2)
- If , thenwhere are given by (34), (35), (36), and (37), respectively.
Proof.
The Jacobian of is of the following form:
Because , we have
Let ; by applying (44) and (83) to (90), we obtain
and
Therefore, the proof of (1) is complete. By applying (45) and (83) to (90), (2) of Theorem 7 can be proved in the same way as before. □
Theorem 8.
Let .
- (1)
- If , then
- (2)
- If , then
Proof.
Suppose that is any point in and let and then, .
So, there is such that . Let ; then, is a well-defined Jordan arc. By applying (44) and (83) for , we have
The right side of Equation (91) can be obtained after a simple calculation by using Equations (44) and (83). The rest is similar to that in (91) and is omitted.
By combining (91) and (92), we get the covering theorem of f. □
Theorem 9.
Let .
- (1)
- If , then , where
- (2)
- If , then , where
In particular, if , then we obtain the following results.
Corollary 3.
Let .
- (1)
- If , then , where
- (2)
- If , then , where
4. Conclusions
In this paper, by means of subordination, we introduce some classes of univalent harmonic functions with respect to the symmetric conjugate points, the analytic parts of which are reciprocal starlike (or convex) functions. Further, we discuss the geometric properties of the classes, such as the integral expression, coefficient estimation, distortion theorem, Jacobian estimation, growth estimate, and covering theorem, which can enrich the research field of univalent harmonic mapping.
Author Contributions
Conceptualization, S.L. and L.M.; methodology, S.L. and L.M.; software, L.M. and H.T.; validation, L.M., S.L. and H.T.; formal analysis, S.L.; investigation, L.M.; resources, S.L.; data curation, L.M.; writing—original draft preparation, L.M.; writing—review and editing, L.M.; visualization, H.T.; supervision, S.L.; project administration, S.L.; funding acquisition, L.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Natural Science Foundation of Inner Mongolia Autonomous Region of China (No. 2020MS01011; No. 2022MS01004), the Program for Young Talents of Science and Technology in Universities of Inner Mongolia Autonomous Region under Grant (No. NJYT-18-A14), the Research Program of science and technology at Universities of Inner Mongolia Autonomous Region (No. NJZY22168), the program for Key Laboratory Construction of Chifeng University (no. CFXYZD202004) and the Research and Innovation Team of Complex Analysis and Nonlinear Dynamic Systems of Chifeng University (no. cfxykycxtd202005).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Duren, P.L. Univalent Functions, Grundlehren der Mathematischen Wissenschaften, Band 259; Springer: NewYork, NY, USA; Berlin/Heidelberg, Germany; Tokyo, Japan, 1983. [Google Scholar]
- Srivastava, H.M.; Owa, S. (Eds.) Current Topics in Analytic Function Theory; World Scientific Publishing Company: Singapore; Hackensack, NJ, USA; London, UK; Hong Kong, China, 1992. [Google Scholar]
- Ma, W.; Minda, D. A unified treatment of some special classes of univalent functions. In Proceedings of the Conference on Complex Analysis, Minneapolis, MN, USA, 16–21 March 1964; Li, Z., Ren, F., Yang, L., Zhang, S., Eds.; International Press: Boston, MA, USA, 1994; pp. 157–169. [Google Scholar]
- Janowski, W. Some extremal problems for certain families of analytic functions. Ann. Pol. Math. 1973, 28, 297–326. [Google Scholar] [CrossRef]
- Sakaguchi, K. On a certain univalent mapping. J. Math. Soc. Jpn. 1956, 11, 72–75. [Google Scholar] [CrossRef]
- El-Ashwah, R.M.; Thomas, D.K. Some subclasses of closed-to-convex functions. J. Ramanujan Math. Soc. 1987, 2, 86. [Google Scholar]
- Ravichandran, V.; Kumar, S.S. Argument estimate for starlike functions of reciprocal order. Southeast Asian Bull. Math. 2011, 35, 837–843. [Google Scholar]
- Sun, Y.; Kuang, W.P.; Wang, Z.G. On meromorphic starlike functions of reciprocal order α. Bull. Malays. Math. Sci. Soc. 2012, 35, 469–477. [Google Scholar]
- Nishiwaki, J.; Owa, S. Coefficient inequalities for starlike and convex functions of reciprocal order α. Electron. J. Math. Anal. Appl. 2013, 1, 242–246. [Google Scholar]
- Arif, M.; Darus, M.; Raza, M.; Khan, Q. Coefficient bounds for some families of starlike and convex functions of reciprocal order. Sci. World J. 2014, 2014, 989640. [Google Scholar]
- Frasin, B.A.; Talafha, Y.; Al-Hawary, T. Subordination results for classes of functions of reciprocal order. Tamsui Oxf. J. Inf. Math. Sci. 2014, 30, 81–89. [Google Scholar]
- Frasin, B.; Sabri, M.A. Sufficient conditions for starlikeness of reciprocal order. Eur. J. Pure Appl. Math. 2017, 10, 871–876. [Google Scholar]
- Mahmood, S.; Srivastava, G.; Srivastava, H.M.; Abujarad, E.S.; Arif, M.; Ghani, F. Sufficiency criterion for a subfamily of meromorphic multivalent functions of reciprocal order with respect to symmetric points. Symmetry 2019, 11, 764. [Google Scholar] [CrossRef]
- Clunie, J.; Sheil-Small, T. Harmonic univalent functions. Ann. Acad. Sci. Fenn. Ser. A I Math. 1984, 39, 3–25. [Google Scholar] [CrossRef]
- Duren, P.L. Harmonic Mappings in the Plane; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Jahangiri, J.M. Harmonic functions starlike in the unit disk. J. Math. Anal. Appl. 1999, 235, 470–477. [Google Scholar] [CrossRef]
- Frasin, B.A. Comprehensive family of harmonic univalent functions. SUT J. Math. 2006, 42, 145–155. [Google Scholar] [CrossRef]
- Silverman, H. Harmonic univalent function with negative coefficients. J. Math. Anal. Appl. 1998, 220, 283–289. [Google Scholar] [CrossRef]
- Ahuja, O.P.; Jahangiri, J.M. A subclass of harmonic univalent functions. J. Nat. Geom. 2001, 20, 45–56. [Google Scholar]
- Lewy, H. On the non-vanishing of the Jacobian in certain one-to-one mappings. Bull. Am. Math. Soc. 1936, 42, 689–692. [Google Scholar] [CrossRef]
- Klimek, D.; Michalski, A. Univalent anti-analytic perturbations of convex analytic mappings in the unit disc. Ann. Univ. Mariae Curie-Skłodowska Sect. A 2007, 61, 39–49. [Google Scholar]
- Hotta, I.; Michalski, A. Locally one-to-one harmonic functions with starlike analytic part. arXiv 2014, arXiv:1404.1826. [Google Scholar]
- Zhu, M.; Huang, X. The distortion theorems for harmonic mappings with analytic parts convex or starlike functions of order β. J. Math. 2015, 2015, 460191. [Google Scholar] [CrossRef]
- Graham, I.; Kohr, G. Geometric Function Theory in One and Higher Dimensions; Marcel Dekker: New York, NY, USA, 2003. [Google Scholar]
- Goluzin, G.M. Geometric Theory of Functions of a Complex Variable; American Mathematical Society: Providence, RI, USA, 1969. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).