Abstract
In this paper, we study the surfaces of osculating circles, which are the sets of all osculating circles at all points of regular curves. Since the surfaces of osculating circles may be singular, it is necessary to investigate the singular points of these surfaces. However, traditional methods and tools for analyzing singular properties have certain limitations. To solve this problem, we define the framed surfaces of osculating circles in the Euclidean 3-space. Then, we discuss the types of singular points using the theory of framed surfaces and show that generic singular points of the surfaces consist of cuspidal edges and cuspidal cross-caps.
MSC:
53A05; 57R45
1. Introduction
Surfaces in the Euclidean 3-space constructed or defined by curves are classical subjects in differential geometry [1]. Canal surfaces, ruled surfaces, surfaces of revolution and translation surfaces are all attractive objects applied extensively in geometric modeling and engineering. People tend to focus on the regular part and pay little attention to the singular points. However, singular points are essential in real life, such as the edges of some objects. In the cross-subject method, the singularity theory of surfaces has a wide range of applications such as physical optics, computer-aided geometric design and kinematics [2,3]. Therefore, it is necessary to explore the singular properties of surfaces.
The classification of singularities has a vital position in the singularity theory [4]. It has become an interesting area for many geometers. In 1985, Mond carried out a detailed study on the singularity classification of the mapping from the Euclidean plane to the Euclidean 3-space [5]. After Mond’s classification, many geometers made great contributions to the singularity theory of surfaces in different spaces [6,7,8]. The decision theorem of singular points and geometric properties of fronts were investigated via flat surfaces in hyperbolic 3-space [9] and maximal surfaces in Lorentz-Minkowski 3-space [10]. For the classification of singular points of surfaces, it is common to use the unfolding theory of functions. Subsequently, Fukunaga and Takahashi explored another method to study singular surfaces [11]. They defined a smooth surface with a moving frame as the framed surface and gave criteria for singular points of the framed surface. Using this powerful tool, some researchers have studied the singular properties of different singular surfaces in recent years [12,13,14,15].
In this paper, we investigate a new class of surfaces called the surfaces of osculating circles, which are the sets of osculating circles at all points of regular curves. In [16], the authors studied the geometric properties of regular surfaces of osculating circles and gave a classification of these surfaces under some conditions on their curvature. However, surfaces of osculating circles may be singular. If singular points exist on these surfaces, we cannot define the normal vector fields at singular points. Therefore, we define the framed surfaces of osculating circles and obtain the geometric features of singular points. Then, we analyze the types of singular points that appear on the surfaces of osculating circles.
As far as we know, no one has ever considered the singular part of the surfaces of osculating circles. Based on this motivation, we analyze the singular properties of these surfaces to differentiate from previous research and provide a wider perspective for future work. The brief organization of the present paper is as follows. We review the notion of the surfaces of osculating circles in the Euclidean 3-space and discuss singular points of these surfaces in Section 3. In Section 4, we define the framed surfaces of osculating circles and calculate the basic invariants and curvature. We also present the main classification theorem of singular points of this paper (Theorem 1) in this section. Finally, we show several singular surfaces of osculating circles as examples in Section 5, which have cuspidal edges and cuspidal cross-caps.
All maps and manifolds we consider here are differentiable of class .
2. Preliminaries
Let be the Euclidean 3-space with the inner product , where , . We define the unit sphere in by , where is the norm of . We denote = . Let be a curve, and the arc–length is . The tangent vector with respect to s is = and . We define three unit vectors as , and , where “×” denotes the vector product of two vectors. Then, the Frenet-Serret formula is as follows:
We review the theory of framed surfaces (cf. [11]). The framed surface is a great generalization of regular surfaces and frontals, at least locally.
Definition 1
([11]). We say : is a framed surface if and for all , where and . We say is a framed base surface if there exists : such that is a framed surface.
Definition 2
([11]). We define : is a Legendre surface if and for all . A Legendre surface is called a Legendre immersion if is an immersion. We define as a frontal (respectively, a front) if there exists such that is a Legendre surface (respectively, a Legendre immersion).
We denote ; then, we can construct the moving frame along as . Thus, we have:
where are called basic invariants of . By the integrability conditions, we have [11]. We define the curvature of a framed surface by
According to the above definition, p is a regular point of if and only if . If is a regular surface, the first and second fundamental invariants are given by
The Gauss curvature and mean curvature of the framed surface are expressed as
We use the following definition and proposition in our paper.
Definition 3
([6]). A non-degenerate singular point p is the k- if for all and , where denotes the i- order directional derivative by .
Proposition 1
([11]). Assume that is a framed surface and . Then () is a Legendre immersion around p if and only if .
For more details, see [7,11].
3. Singularities of the Surface of Osculating Circles
In this section, we retrospect the definition of the surface of osculating circles and give the sets of singular points of the surface [16]. Moreover, we show the characters of singular points of this surface.
Definition 4
([16]). Let be a curve parametrized by arc–length. Suppose that the radius of curvature is , where is a non–zero function. The surface of osculating circles generated by is defined as the parametrized surface given by
This surface is denoted by .
In the present paper, we assume the curvature functions of all curves do not vanish in their domains.
The set of singular points of is given in [16], where . The following proposition indicates characteristics of the singular points, where .
Proposition 2
([16]). Let be a curve and be the parametrization of . Then, the sets of singular points of are given by
According to the above proposition, we can easily know that the points of are located on the generating curve . The characteristics of the singular points of are as follows.
For a map germ , the point p is a cross-cap if at p is -equivalent to the map germ . For more details, see [17].
Proposition 3.
Let be a surface of osculating circles generated by . Then, cross-cap singular points do not appear on .
Proof.
Taking the partial derivative of , we have
If is a singular point of , then . In [18], Whitney proved if there exists a local coordinate system centered at p such that
then the type of singular point p is a cross-cap. Therefore, cross-cap singular points do not appear on . □
4. Surfaces of Osculating Circles as Framed Base Surfaces
In this section, we define a framed surface of . Then, we investigate the singular points of this surface using the criterion for a framed surface. For generic singular points of a frontal from to , we show that contains cuspidal edges and cuspidal cross-caps whose normal forms are and . Cuspidal lips, cuspidal beaks, and Chen-Matsumoto-Mond singular points with normal forms and , respectively, do not appear on the surface of osculating circles.
Definition 5.
Let be a regular curve and be a surface of osculating circles generated by . If there exists a smooth function such that and , where and , then we have a framed surface . We call the framed surface of osculating circles and denote the framed base surface as for short.
Let Therefore, we have
From Equations (1) and (2), the basic invariants of are given by
We denote . Since , we have The curvature of is given by
On the basis of the above results, we get the following propositions.
Proposition 4.
Let be a framed surface of . We denote and as the sets of singular points of ; then, we have
- (1)
- If ,
- (a)
- since , is not an immersion (a regular surface) around p;
- (b)
- is a Legendre immersion around p if and only if or .
- (2)
- If ,
- (c)
- is an immersion (a regular surface) around p;
- (d)
- is a Legendre immersion around p.
Proposition 5.
Let be a regular surface of osculating circles. The fundamental invariants are expressed as
Proposition 6.
The Gauss curvature K and the mean curvature H of the regular surface are
From Proposition 6, we can easily have the following results.
Corollary 1.
The regular surface is developable if and only if .
Corollary 2.
The regular surface is minimal if and only if .
In order to analyze the singular properties of the OFB surface and simplify the proof process of Theorem 1, we give the following lemma to recognize whether or not the OFB surface is a front.
Lemma 1.
Let be a framed surface of . If p is a singular point of , the OFB surface is a front near p if and only if .
Proof.
According to Proposition 4, the OFB surface is a front around p if and only if or . Since and , then we have the result. □
For a map germ , is a singular point of f. We say p is of co-rank if and only if [19]. For the purpose of discussing the types of singular points, it is necessary to calculate the co-rank of the singular points that appear on the OFB surfaces.
Lemma 2.
Let be a framed surface of . If is a singular point of , the OFB surface is parametrized by a co-rank one singular point at .
Proof.
According to Proposition 2, p is a singular point of the OFB surface if and only if , where . Next, we show that the type of the singular point p is of co-rank one. By a direct calculation, we have
Therefore, the rank of the differential of is equal to one, which means that the co-rank of the singular point is one. □
Now, we review the related definitions of non-degenerate singular points briefly. More details are in [8,9]. Let be a frontal of Legendre surface . Then, there exists a smooth function on U, which is called a discriminant function, such that .
If the exterior derivative does not vanish at a singular point p, we call the singular point p non-degenerate. Parameterizing the singular point set, we have the singular curve satisfying . Then, we can choose a null vector field along satisfying , where . Using the null vector field as a tool, we can identify the types of singular points that appear on .
Proposition 7.
Let be a framed surface of . The singular point p of is non-degenerate if and only if .
Proof.
Since p is a singular point of , we define the density function as
Then and Therefore, the singular point p of is non-degenerate if and only if , which completes the proof of this proposition. □
Corollary 3.
Let be a framed surface of . The singular point p of is degenerate if and only if or .
There are only the first kind singular points on the OFB surfaces, which are illustrated by the following proposition. Especially, the OFB surfaces have neither swallowtail singular points nor cuspidal butterfly singular points.
Proposition 8.
Let be a framed surface of . Singular points of the OFB surface are all the first kind.
Proof.
Since
by Definition 3, the singular points of are all the first kind. □
The above propositions are all in preparation for the following theorem. According to the criteria of the types of singular points on the framed surfaces (Theorem 4 in [11], Proposition 1.3 in [9], and Theorem 1.4 in [10]), we have the following conclusions.
Theorem 1.
Let be the surface of osculating circles generated by . We assume that is a framed surface of osculating circles and , where .
- (1)
- If , then is a cuspidal edge at if and only if or .
- (2)
- If , , then is a cuspidal cross-cap at if and only if or .
Proof.
Because of
the null vector field is defined as
Suppose is a non-degenerate singular point of . By the definition of the OFB surface, we have
Since , then we have satisfy one of the following conditions:
- (A)
- and , or
- (B)
- , and .
For Case (A), since , we have ; that is,
We know is a singular point of if and only if . According to the implicit function theorem, there exists a function s with the condition such that the singular curve is . By a straight calculation, we have
and
For Case (B), by the above conditions,
Then, we can also give the singular curve as . Therefore, we have
and
Thus, we complete the proof of assertions (1) and (2). □
If the singular point , then , which means the singular point p is degenerate. Then, the OFB surface at such a singular point cannot be the cuspidal edge, swallowtail, or cuspidal cross-cap.
Next, we consider other singular points with co-rank one. Izumiya, Saji, and Takahashi first gave the criteria for cuspidal lips and cuspidal beaks in [20].
Proposition 9.
Let be the OFB surface. For cuspidal lips and cuspidal beaks, neither of them appears on .
Proof.
Let be a degenerate singular point of . By Lemma 2, we get p is a co-rank one singular point. Hence,
that means . According to Theorem 3.2 in [7], cuspidal lips and cuspidal beaks do not appear on . □
If p is a co-rank one singular point of , then there exist two linearly independent vector fields near p such that . A function is defined by
Proposition 10.
Let be the OFB surface. Then, Chen-Matsumoto-Mond singular points do not appear on .
Proof.
Let be a co-rank one singular point of . The function is defined as , where . Then, we have
By a direct calculation, we have p is a critical point of . Additionally,
Thus, we get . According to Theorem 2.2 in [21], Chen-Matsumoto-Mond singular points do not appear on . □
5. Examples
For Theorem 1, we give specific examples of the OFB surfaces and analyze the types of singular points on the OFB surfaces. It can be seen that the surfaces of osculating circles may have cuspidal edges and cuspidal cross-caps.
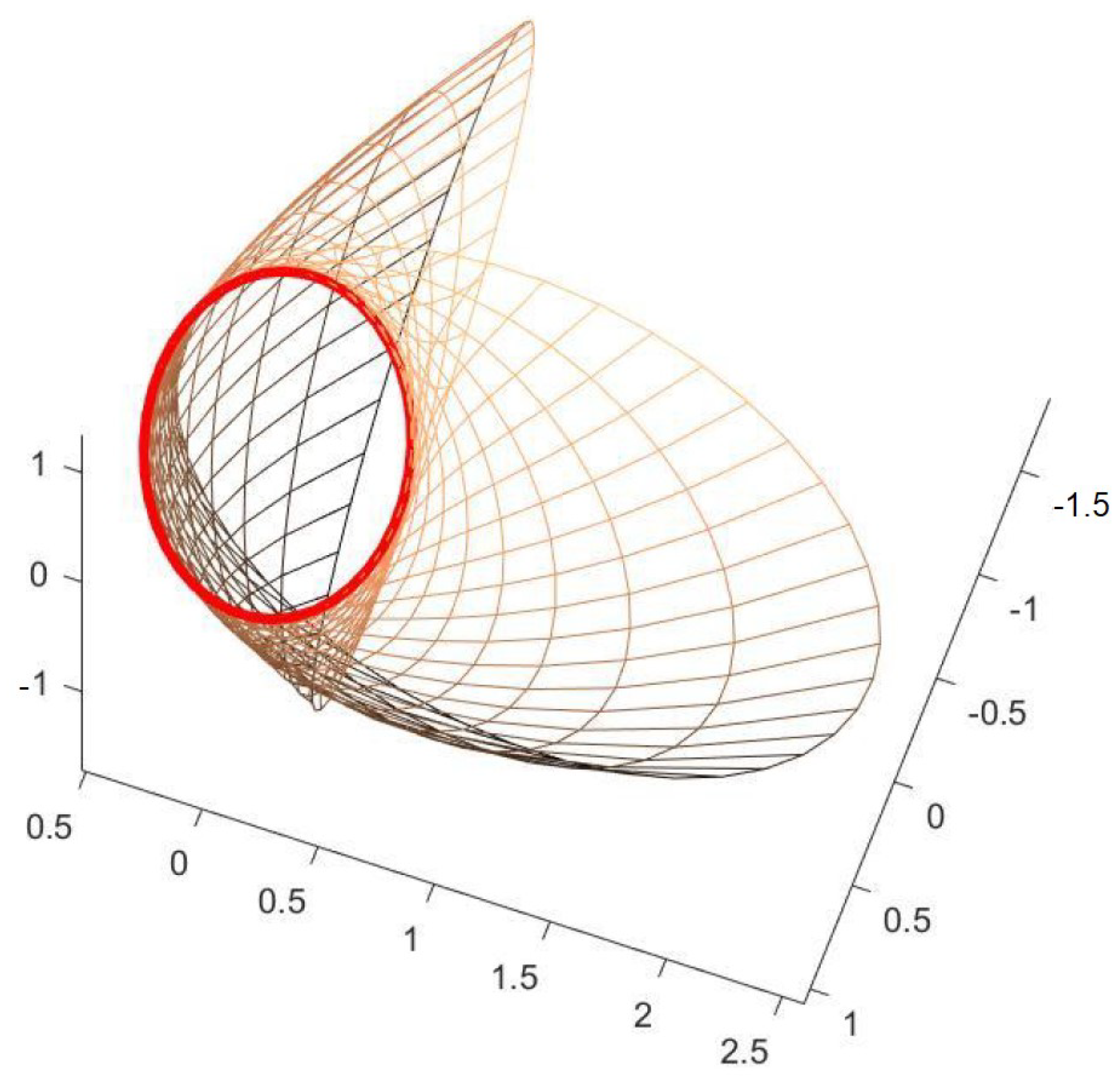
Example 1
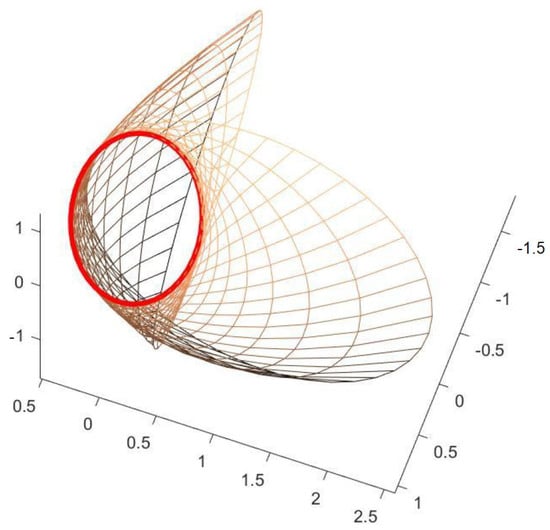
Figure 1.
and cuspidal cross-caps (thick red circle).
The surface of osculating circles generated by the regular curve β is
where
Then, the set of singular points of can be given by
By Theorem 1, has cuspidal cross-cap singular points at , where and .
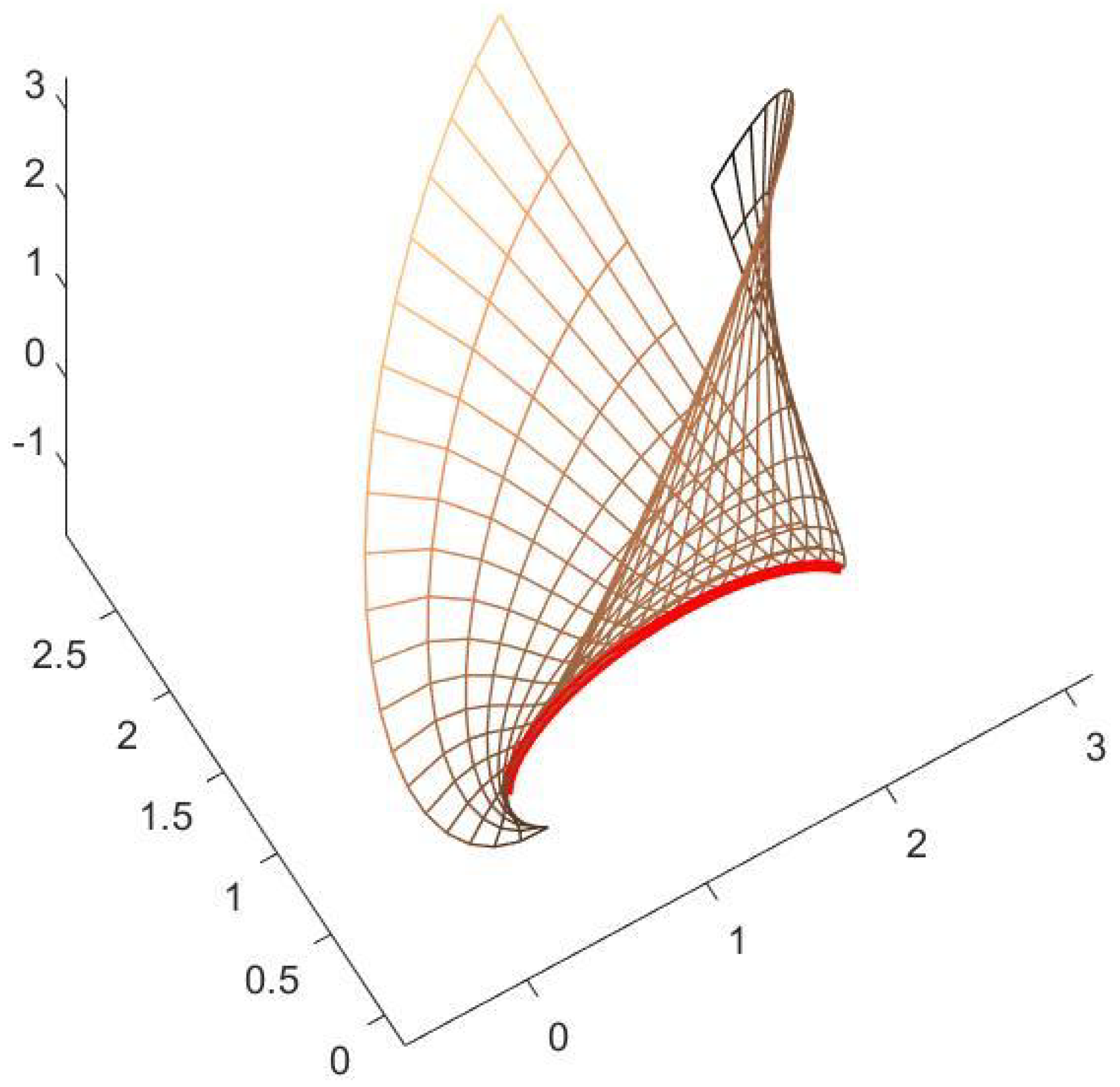
Example 2
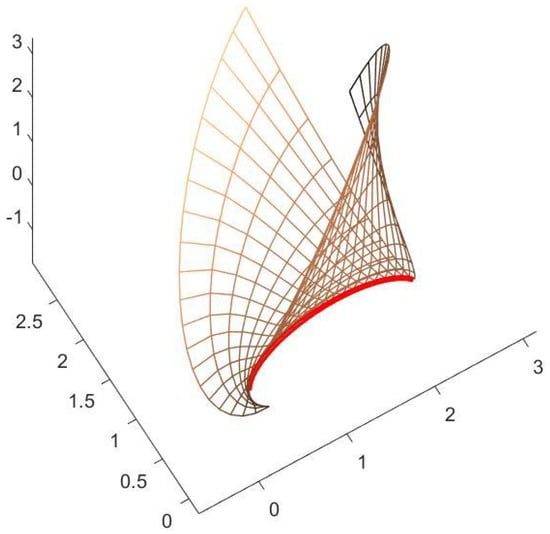
Figure 2.
and cuspidal edges (thick red line).
Then, we have the Frenet–Serret formula as follows
We also have the curvature function and the torsion function
In this case, when . This curve is given in [22]; we consider the surface of osculating circles generated by this curve. In order to give a clear parameterized form of , let
The surface of osculating circles generated by the regular curve γ is
Then, the set of singular points of can be given by
By Theorem 1, has cuspidal edge singular points at .
6. Conclusions
In this paper, we investigated the singular properties of the surfaces of osculating circles. By the tool of framed surfaces, we analyzed the types of singular points that appear on surfaces and obtained the geometric conditions for these surfaces to have non-degenerate singular points, such as cuspidal edges and cuspidal cross-caps. For other higher-order degenerate singular points, we have not discussed their existence yet. Although this work may be difficult, we will precisely identify the types of singular points and generalize the same results in n-dimensional spaces in another paper.
Author Contributions
Writing—Original Draft Preparation, K.L.; Writing—Review and Editing, Z.L.; Writing—Review and Editing, D.P.; Funding Acquisition, D.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China grant number 11671070.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the editors and referees for helpful comments to improve the original paper. Moreover, we would like to express our gratitude to the referees who provided detailed suggestions for our further research.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| OFB surface | the framed base surface of osculating circles |
References
- O’Neill, B. Elementary Differential Geometry, 2nd ed.; Academic Press: New York, NY, USA, 2006. [Google Scholar]
- Taş, F.; İlarslan, K. A new approach to design the ruled surface. Int. J. Geom. Methods Mod. Phys. 2019, 16, 1950093. [Google Scholar]
- Li, P.; Pei, D. Nullcone fronts of spacelike framed curves in Minkowski 3-space. Mathematics 2021, 9, 2939. [Google Scholar] [CrossRef]
- Bruce, J.W.; Giblin, P.J. Curves and Singularities: A Geometrical Introduction to Singularity Theory, 2nd ed.; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Mond, D. On the classification of germs of maps from R2 to R3. Proc. Lond. Math. Soc. 1985, 50, 333–369. [Google Scholar] [CrossRef]
- Saji, K. Normal form of the swallowtail and its applications. Int. J. Math. 2018, 29, 1850046. [Google Scholar] [CrossRef]
- Fukui, T.; Hasegawa, M. Singularities of parallel surfaces. Tohoku Math. J. 2012, 64, 387–408. [Google Scholar] [CrossRef]
- Saji, K.; Umehara, M.; Yamada, K. The geometry of fronts. Ann. Math. 2009, 169, 491–529. [Google Scholar] [CrossRef]
- Kokubu, M.; Rossman, W.; Saji, K.; Umehara, M.; Yamada, K. Singularities of flat fronts in hyperbolic space. Pac. J. Math. 2005, 221, 303–351. [Google Scholar] [CrossRef]
- Fujimori, S.; Saji, K.; Umehara, M.; Yamada, K. Singularities of maximal surfaces. Math. Z. 2008, 259, 827–848. [Google Scholar] [CrossRef]
- Fukunaga, T.; Takahashi, M. Framed surfaces in the Euclidean space. Bull. Braz. Math. Soc. 2019, 50, 37–65. [Google Scholar] [CrossRef]
- Fukunaga, T.; Takahashi, M. Singularities of translation surfaces in the Euclidean 3-space. Results Math. 2022, 77, 28. [Google Scholar] [CrossRef]
- Huang, J.; Pei, D. Singularities of non-developable surfaces in three-dimensional Euclidean space. Mathematics 2019, 7, 1106. [Google Scholar] [CrossRef]
- Yazıcı, B.D.; İşbilir, Z.; Tosun, M. Generalized osculating-type ruled surfaces of singular curves. Math. Methods Appl. Sci. 2023, 46, 8532–8545. [Google Scholar]
- Li, Y.; Eren, K.; Ayvacı, K.H.; Ersoy, S. The developable surfaces with pointwise 1-type Gauss map of Frenet type framed base curves in Euclidean 3-space. AIMS Math. 2023, 8, 2226–2239. [Google Scholar] [CrossRef]
- López, R.; Camci, Ç.; Uçum, A.; İlarslan, K. Surface of osculating circles in Euclidean space. Vietnam J. Math. 2022. [Google Scholar] [CrossRef]
- Hasegawa, M.; Honda, A.; Naokawa, K.; Umehara, M.; Yamada, K. Intrinsic invariants of cross caps. Sel. Math. 2014, 20, 769–785. [Google Scholar] [CrossRef]
- Whitney, H. The general type of singularity of a set of 2n − 1 smooth functions of n variables. Duke Math. J. 1943, 10, 161–172. [Google Scholar] [CrossRef]
- Alghanemi, A.; AlGhawazi, A. The λ-point map between two Legendre plane curves. Mathematics 2023, 11, 997. [Google Scholar] [CrossRef]
- Izumiya, S.; Saji, K.; Takahashi, M. Horospherical flat surfaces in hyperbolic 3-space. J. Math. Soc. Jpn. 2010, 62, 789–849. [Google Scholar] [CrossRef]
- Saji, K. Criteria for cuspidal Sk singularities and their applications. J. Gökova Geom. Topol. GGT 2010, 4, 67–81. [Google Scholar]
- Zhao, Q.; Pei, D.; Wang, Y. Singularities for one-parameter developable surfaces of curves. Symmetry 2019, 11, 108. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).