
A Novel Prediction Model for Seawall Deformation Based on CPSO-WNN-LSTM
Abstract
:1. Introduction
2. Major Influencing Factor Determination Method Based on the CPSO-WNN Model
2.1. The Principle of the WNN
2.2. Parameter Optimization Method for WNN Based on CPSO
2.3. The Principle of Major Influencing Factor Determination Based on CPSO-WNN Model
3. CPSO-WNN-LSTM Prediction Model for Seawall Deformation
3.1. Analysis of Each Component of Seawall Deformation
3.1.1. Component of Seawall Settlement
- (1)
- Water pressure component
- (2)
- Water level variation lagging effect component
- (3)
- Temperature component
- (4)
- Time effect component
- (5)
- Wind speed component:
- (6)
- Tide component:
3.1.2. Component of Seawall Horizontal Deformation
3.2. Seawall Deformation Prediction Model Construction Method Based on CPSO-WNN-LSTM
3.2.1. Long Short-Term Memory Neural Network
3.2.2. The Construction Process of Prediction Model Based on CPSO-WNN-LSTM
4. Case Study
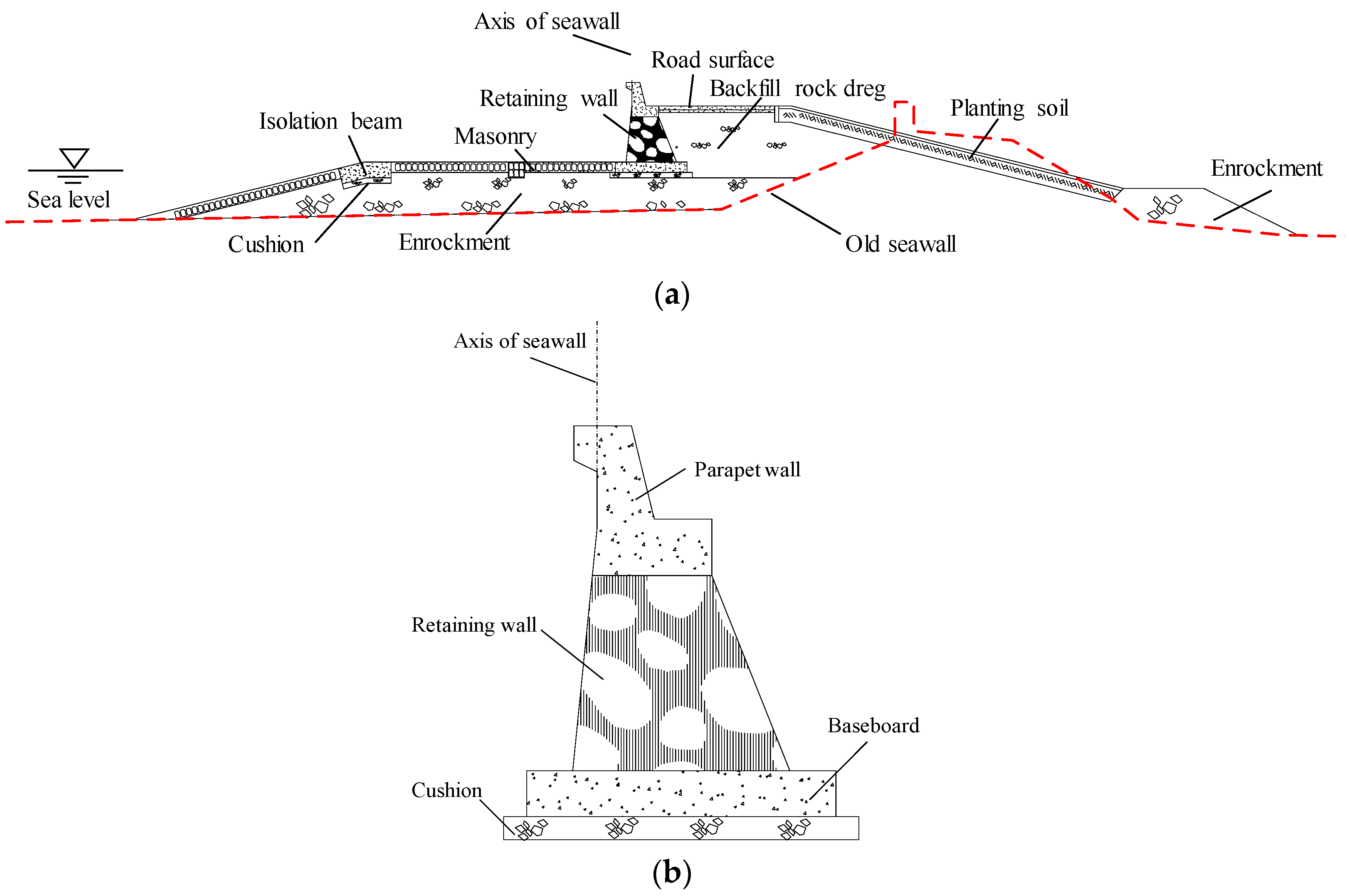
4.1. Project Overview
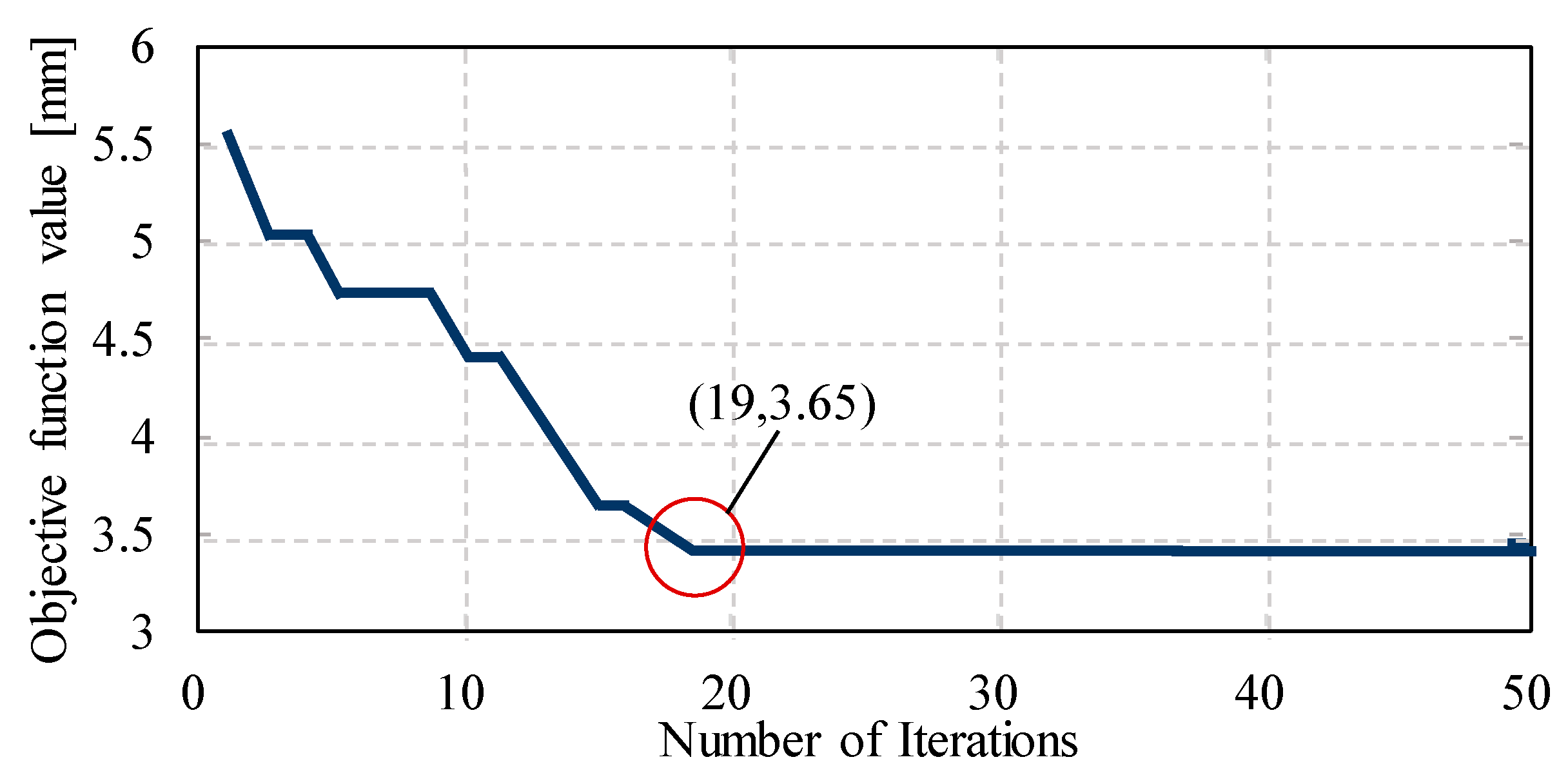
4.2. Major Influencing Factor Determination Based on CPSO-MNN
4.3. Analyses of Fitting and Prediction Results
4.3.1. The Variables Inputted in the Prediction Model
4.3.2. Analyses and Comparisons of the Fitting and Prediction Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shao, C.; Gu, C.; Meng, Z.; Hu, Y. A data-driven approach based on multivariate copulas for quantitative risk assessment of concrete dam. J. Mar. Sci. Eng. 2019, 7, 353. [Google Scholar] [CrossRef]
- Lan, Z.; Huang, M. Safety assessment for seawall based on constrained maximum entropy projection pursuit model. Nat. Hazards 2018, 91, 1165–1178. [Google Scholar] [CrossRef]
- Lan, Z.; Huang, M. Health assessment model and maintenance decision model for seawall prognostics and health management system. Arab. J. Sci. Eng. 2019, 44, 8377–8387. [Google Scholar] [CrossRef]
- Ning, D.; Wang, R.; Chen, L.; Li, J.; Zang, J.; Cheng, L.; Liu, S. Extreme wave run-up and pressure on a vertical seawall. Appl. Ocean Res. 2017, 67, 188–200. [Google Scholar] [CrossRef]
- Huang, M.; Liu, J. Monitoring and analysis of Shanghai Pudong seawall performance. J. Perform. Constr. Facil. 2009, 23, 399–405. [Google Scholar] [CrossRef]
- Yu, Q.; Wang, Q.; Yan, X.; Yang, T.; Song, S.; Yao, M.; Zhou, K.; Huang, X. Ground deformation of the Chongming East Shoal Reclamation Area in Shanghai based on SBAS-InSAR and laboratory tests. Remote Sens. 2020, 12, 1016. [Google Scholar] [CrossRef]
- Dixon, T.H.; Amelung, F.; Ferretti, A.; Novali, F.; Dokka, R.; Sella, G.; Kim, S.W.; Wdowinski, S.; Whitman, D. Subsidence and flooding in New Orleans. Nature 2006, 441, 587–588. [Google Scholar] [CrossRef]
- Pei, Y.; Liao, M.; Wang, H. Monitoring levee deformation with repeat-track space-borne SAR images. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 266–269. [Google Scholar]
- Zhang, Y.J.; Wan, Z.; Xie, C.; Shao, Y.; Yuan, M.H.; Chen, W.; Wang, X. Deformation analysis of the seawall in Qiantang estuary with multi-temporal InSAR. J. Remote Sens. 2015, 19, 339–346. [Google Scholar]
- Qin, X.; Xie, L.; Wang, C.; Liao, M. 3D deformation monitoring and analysis of coastal seawall combined with multi-view InSAR measurements. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, IEEE, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 1648–1651. [Google Scholar]
- Wang, G.; Li, P.; Li, Z.; Ding, D.; Qiao, L.; Xu, J.; Li, G.; Wang, H. Coastal dam inundation assessment for the Yellow River Delta: Measurements, analysis and scenario. Remote Sens. 2020, 12, 3658. [Google Scholar] [CrossRef]
- Oh, Y.N.; Chien, L.K.; Chen, S. Deformation and settlement analysis of foundation in seawalls using DDA. In Proceedings of the Ninth International Offshore and Polar Engineering Conference, ISOPE, Brest, France, 30 May–4 June 1999. [Google Scholar]
- Kanatani, M.; Kawai, T.; Tochigi, H. Prediction method on deformation behavior of caisson-type seawalls covered with armored embankment on man-made islands during earthquakes. Soils Found. 2001, 41, 79–96. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Wang, L.; Li, L.; Guo, Z. Safety evaluation of an ancient masonry seawall structure with modified DDA method. Comput. Geotech. 2014, 55, 277–289. [Google Scholar] [CrossRef]
- Qin, P.; Qin, Z.H. Prediction of seawall foundation settlement based on the improved variable dimension fraction and artificial neural network model. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, IEEE, Shenyang, China, 27–29 March 2010; pp. 347–350. [Google Scholar]
- Qin, P.; Cheng, C. Prediction of seawall settlement based on a combined LS-ARIMA model. Math. Probl. Eng. 2017, 2017, 7840569. [Google Scholar] [CrossRef]
- Ma, J.Q.; Wang, X.G.; Pei, C.Y. Research on the seawall settlement based on BP neural network. Chin. Water Transp. 2017, 17, 225–227. (In Chinese) [Google Scholar]
- Yu, H.; Wu, Z.R.; Bao, T.F.; Zhang, L. Multivariate analysis in dam monitoring data with PCA. Sci. Chin. Technol. Sci. 2010, 53, 1088–1097. [Google Scholar] [CrossRef]
- Lei, W.; Wang, J. Dynamic Stacking ensemble monitoring model of dam displacement based on the feature selection with PCA-RF. J. Civ. Struct. Health Monit. 2022, 12, 557–578. [Google Scholar] [CrossRef]
- Dai, B.; Gu, C.; Zhao, E.; Qin, X. Statistical model optimized random forest regression model for concrete dam deformation monitoring. Struct. Control Health Monit. 2018, 25, e2170. [Google Scholar] [CrossRef]
- Yang, Z.; Ye, Q.; Chen, Q.; Ma, X.; Fu, L.; Yang, G.; Yan, H.; Liu, F. Robust discriminant feature selection via joint L2, 1-norm distance minimization and maximization. Knowl.-Based Syst. 2020, 207, 106090. [Google Scholar] [CrossRef]
- Gu, H.; Yang, M.; Gu, C.; Huang, X. A factor mining model with optimized random forest for concrete dam deformation monitoring. Water Sci. Eng. 2021, 14, 330–336. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Hu, Y.; Gu, C.; Meng, Z.; Shao, C.; Min, Z. Prediction for the settlement of concrete face rockfill dams using optimized LSTM model via correlated monitoring data. Water 2022, 14, 2157. [Google Scholar] [CrossRef]
- Bolboacă, R.; Haller, P. Performance analysis of long short-term memory predictive neural networks on time series data. Mathematics 2023, 11, 1432. [Google Scholar] [CrossRef]
- Zhang, Q.; Benveniste, A. Wavelet networks. IEEE Trans. Neural Netw. 1992, 3, 889–898. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Chen, Z.; Xiong, R.; Wang, K.; Jiao, B. Optimal energy management strategy of a plug-in hybrid electric vehicle based on a particle swarm optimization algorithm. Energies 2015, 8, 3661–3678. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, W.; Liu, J.; Zhao, T.; Zou, L.; Wang, X. A new prediction model for transformer winding hotspot temperature fluctuation based on fuzzy information granulation and an optimized wavelet neural network. Energies 2017, 10, 1998. [Google Scholar] [CrossRef]
- Zhang, D. A new approach for the efficient estimation of the number of hidden unites for feedforward neural networks. Comput. Eng. Appl. 2003, 5, 21–23, 95. (In Chinese) [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Point | LSTM | BPNN | The Proposed Model | |||
|---|---|---|---|---|---|---|
| R2 | RMSE [mm] | R2 | RMSE [mm] | R2 | RMSE [mm] | |
| N1 | 0.9765 | 0.0172 | 0.9655 | 0.0182 | 0.9976 | 0.0032 |
| N3 | 0.9740 | 0.0173 | 0.9698 | 0.0251 | 0.9956 | 0.0147 |
| N9 | 0.9880 | 0.0062 | 0.9750 | 0.0167 | 0.9902 | 0.0061 |
| N12 | 0.9761 | 0.0065 | 0.9777 | 0.0161 | 0.9921 | 0.0064 |
| N14 | 0.9769 | 0.0061 | 0.9409 | 0.0197 | 0.9801 | 0.0049 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, S.; Gu, C.; Shao, C.; Hu, Y.; Xu, Y.; Huang, X. A Novel Prediction Model for Seawall Deformation Based on CPSO-WNN-LSTM. Mathematics 2023, 11, 3752. https://doi.org/10.3390/math11173752
Zheng S, Gu C, Shao C, Hu Y, Xu Y, Huang X. A Novel Prediction Model for Seawall Deformation Based on CPSO-WNN-LSTM. Mathematics. 2023; 11(17):3752. https://doi.org/10.3390/math11173752
Chicago/Turabian StyleZheng, Sen, Chongshi Gu, Chenfei Shao, Yating Hu, Yanxin Xu, and Xiaoyu Huang. 2023. "A Novel Prediction Model for Seawall Deformation Based on CPSO-WNN-LSTM" Mathematics 11, no. 17: 3752. https://doi.org/10.3390/math11173752