
Attitude Control of UAVs with Search Optimization and Disturbance Rejection Strategies

Abstract
:1. Introduction
2. Algorithm Introduction
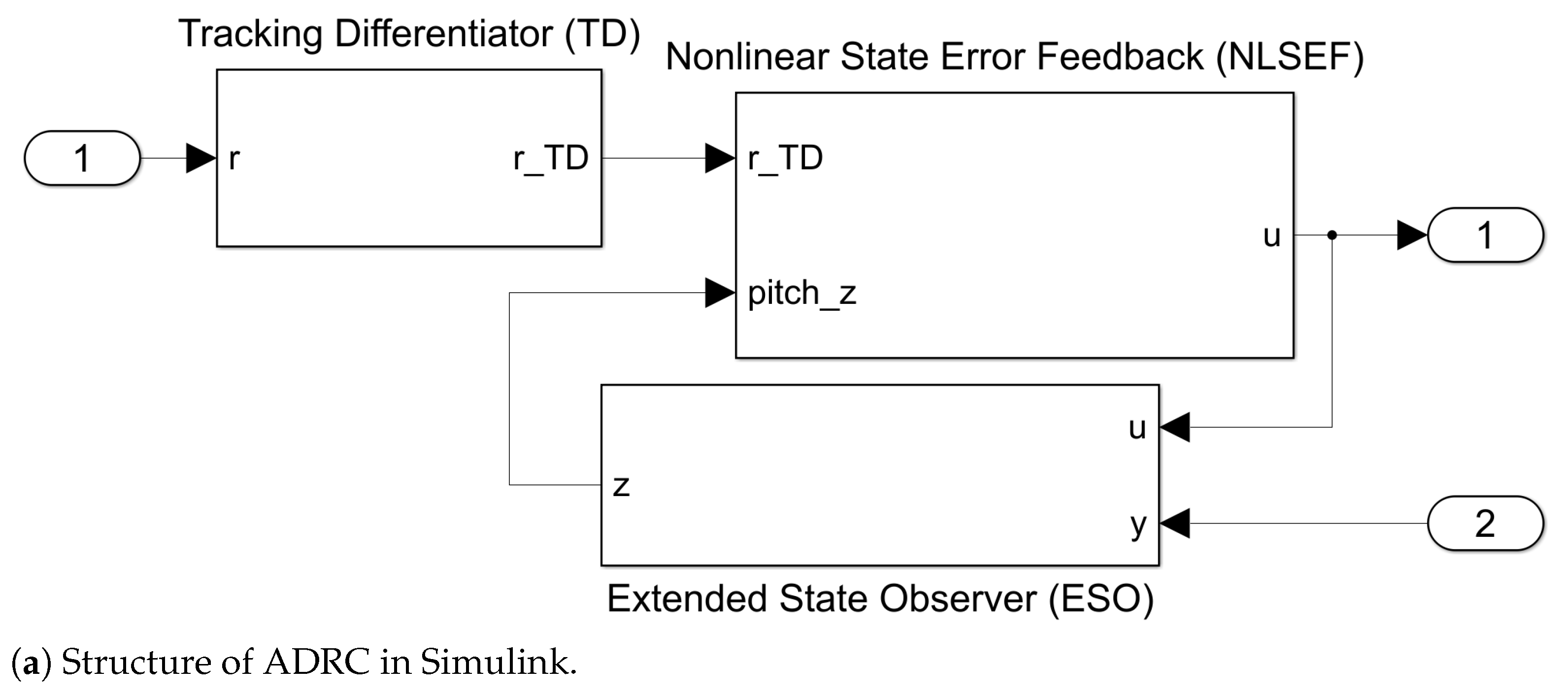
2.1. Active Disturbance Rejection Controller
- (1)
- Establishing a second-order TD:where ·) refers to the estimation function in the nonlinear observer used to estimate the disturbance of the system.
- (2)
- Establishing a third-order nonlinear ESOLet the total disturbance be a new state of the controlled system, and expand (2) to (4):where means the state variable that represents the disturbance expanded from the original object. Establishing an ESO for (4):where , , and are a set of parameters. The ·) refers to the estimation function in the linear observer used to estimate the system state.
- (3)
- Designing a NLSEF:where c, , and are a set of parameters.
- (4)
- Compensation control variable:where is a manually selected parameter for the controlled object. As a control variable, u is divided into two parts, where is the component that compensates for disturbances and is the component that uses nonlinear feedback to control the integrator in series.
2.2. Beetle Antennae Search Algorithm
2.3. Ant Colony Optimization Algorithm
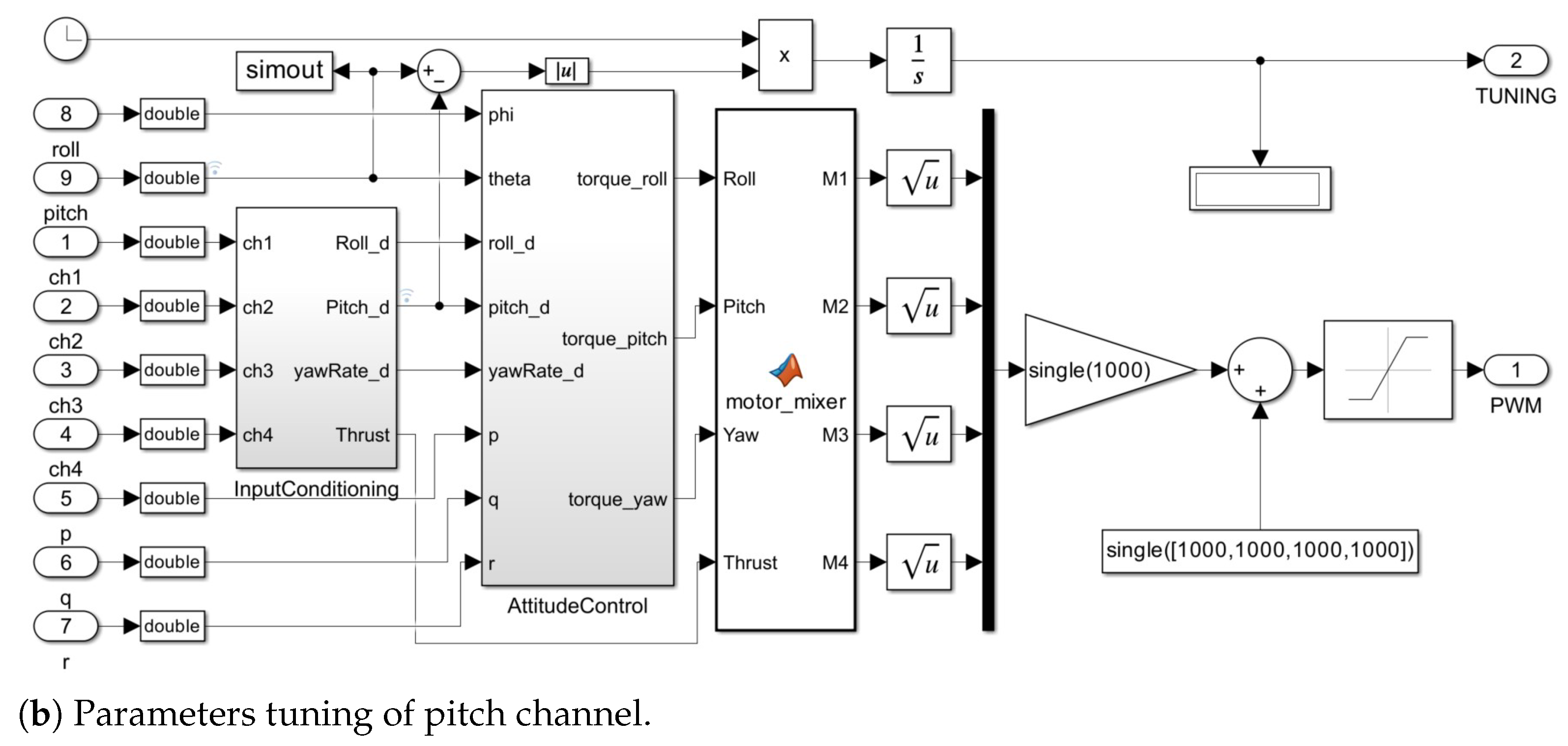
3. Design of ADRC Parameter Tuning
4. Algorithm Improvement
4.1. Group Mechanism
| Algorithm 1 BAC Algorithm Flow |
|
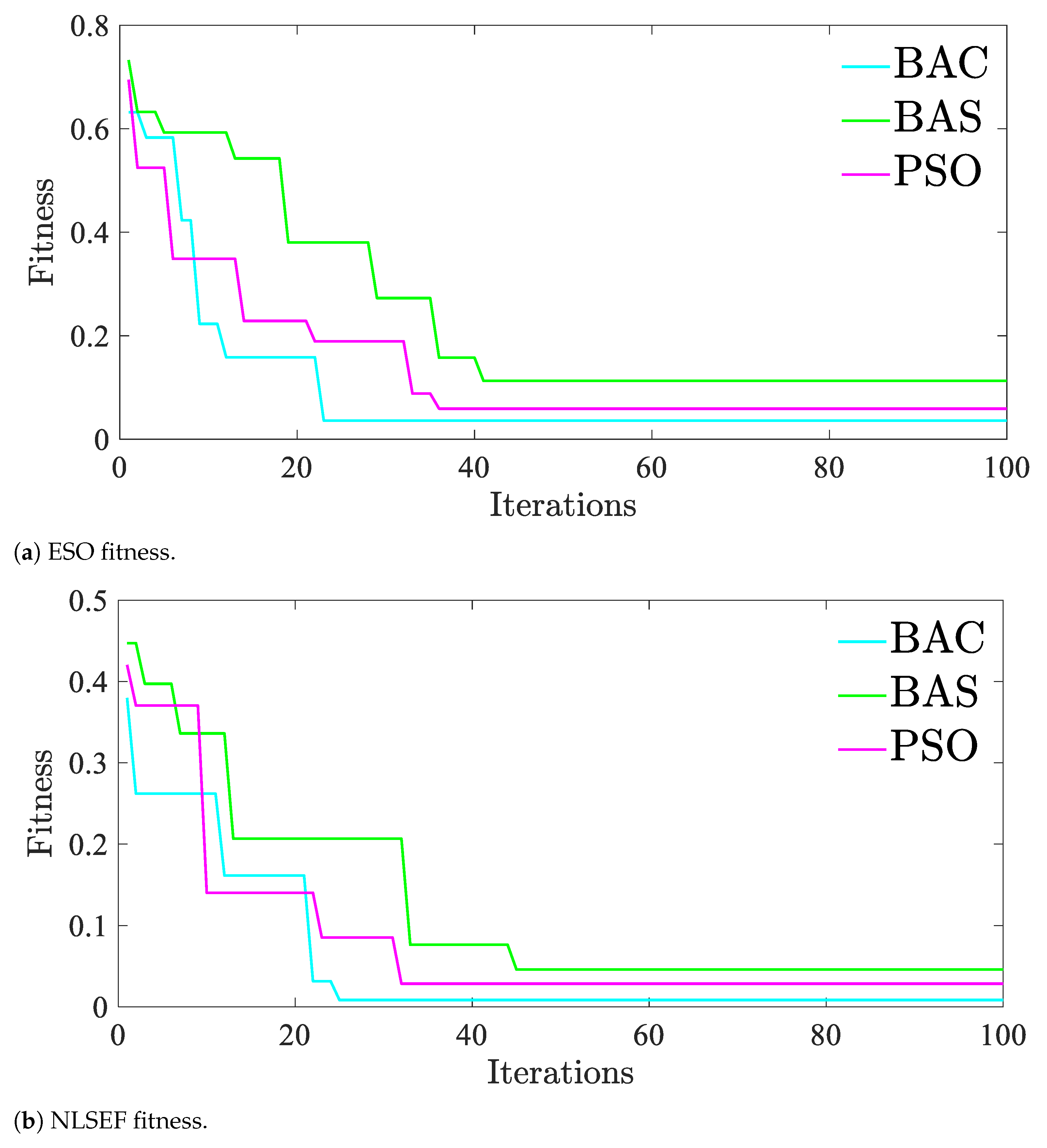
4.2. Algorithm Performance Testing
5. Experiment and Analysis
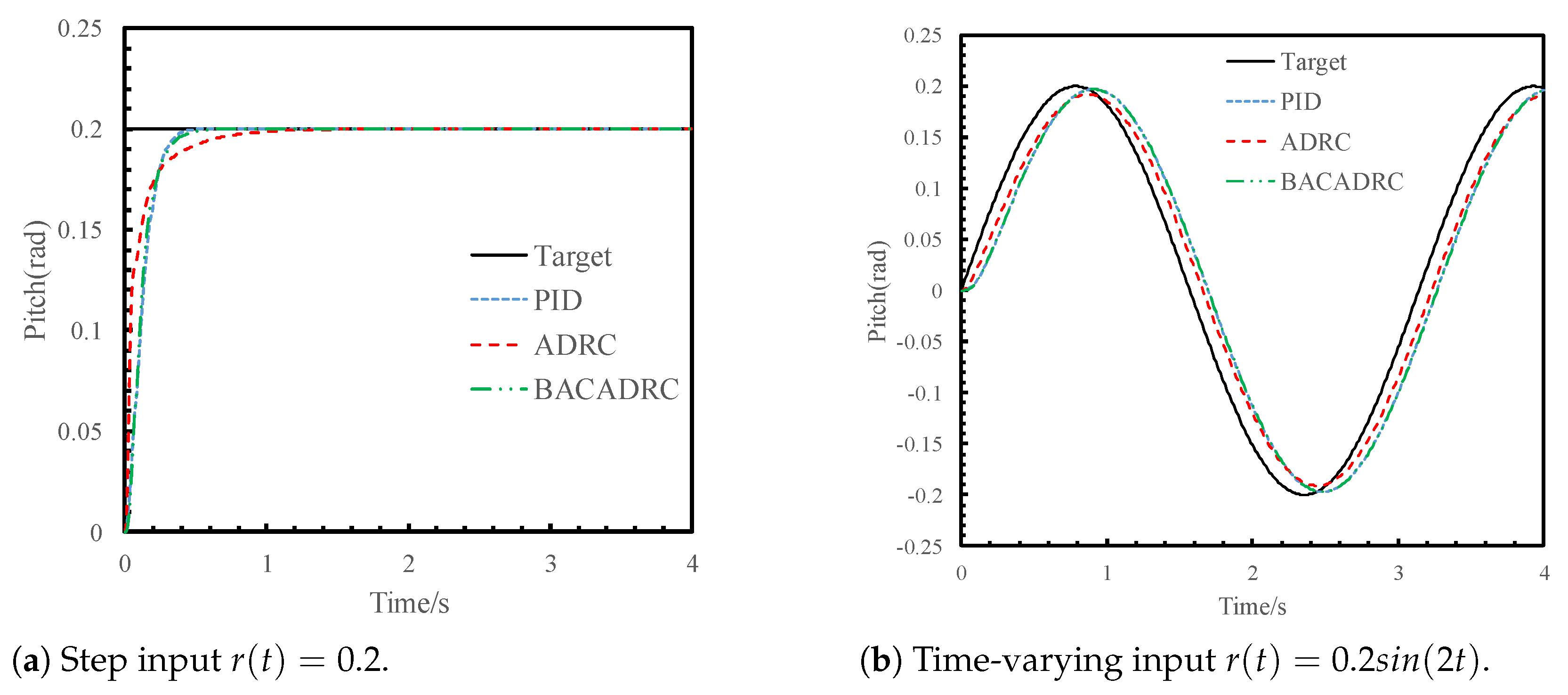
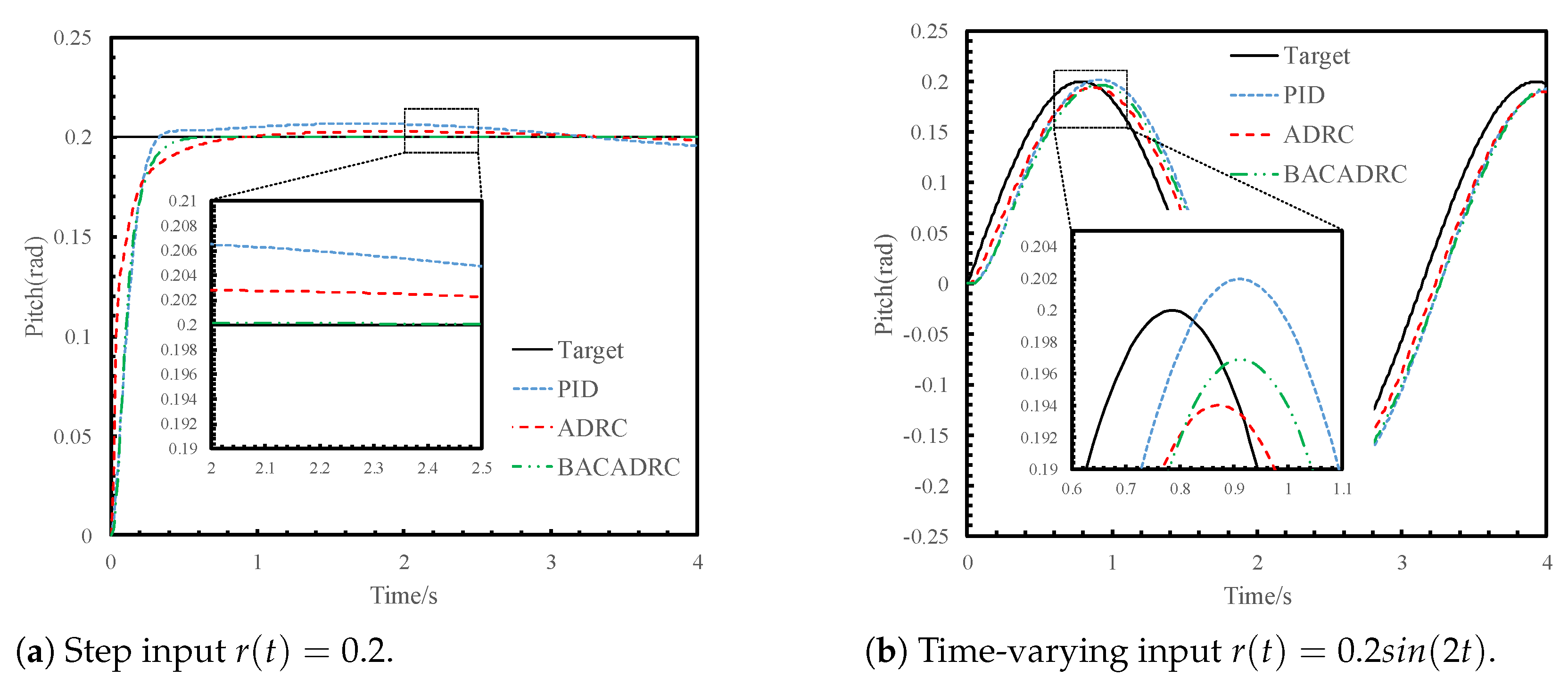
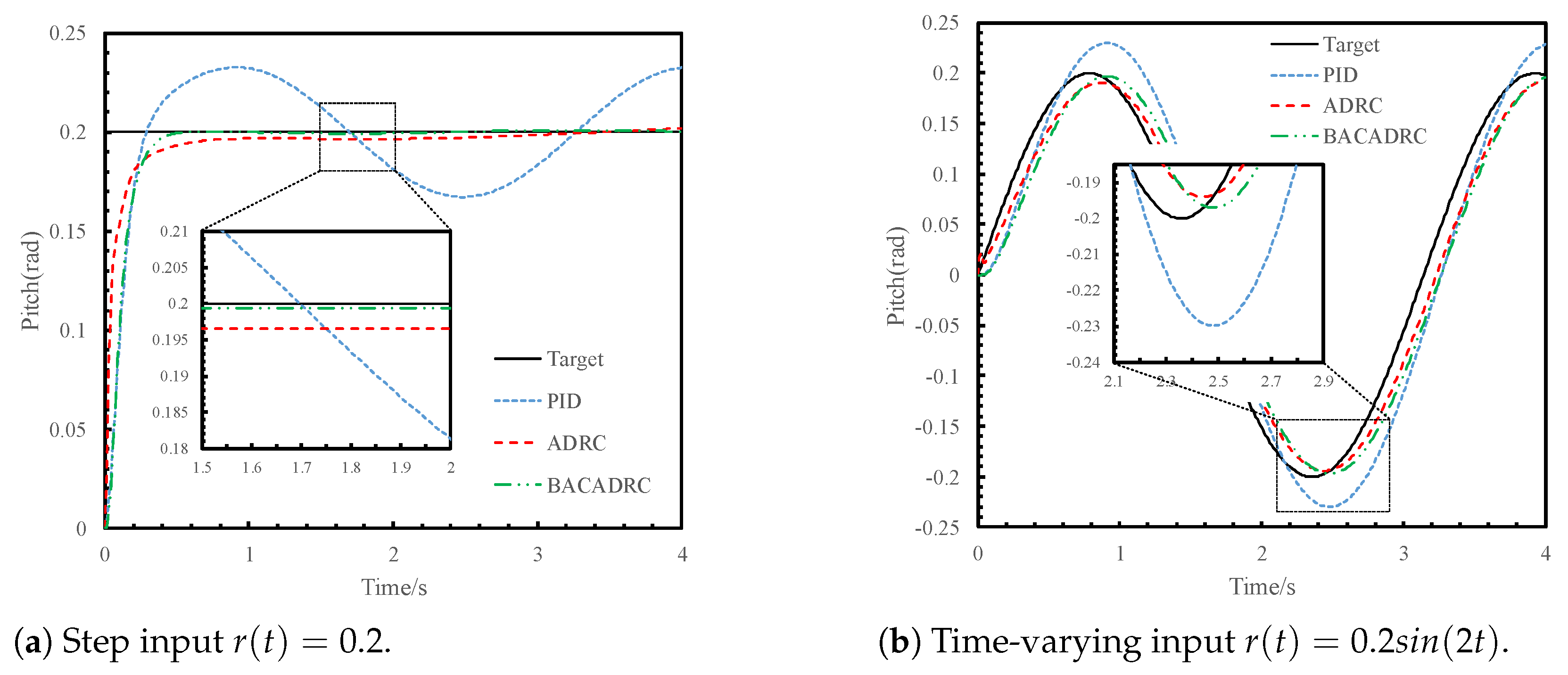
5.1. Simulation and Results Analysis
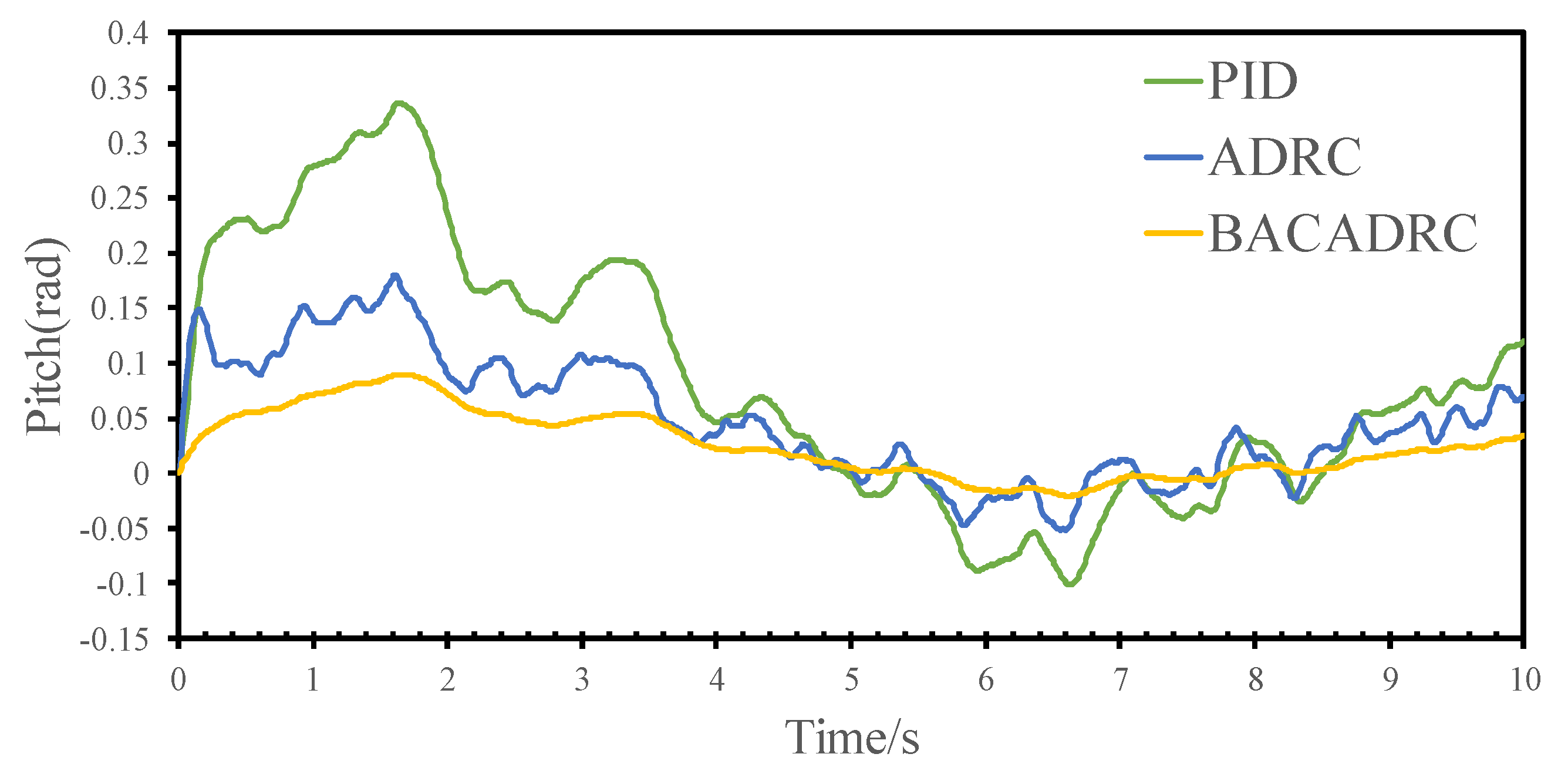
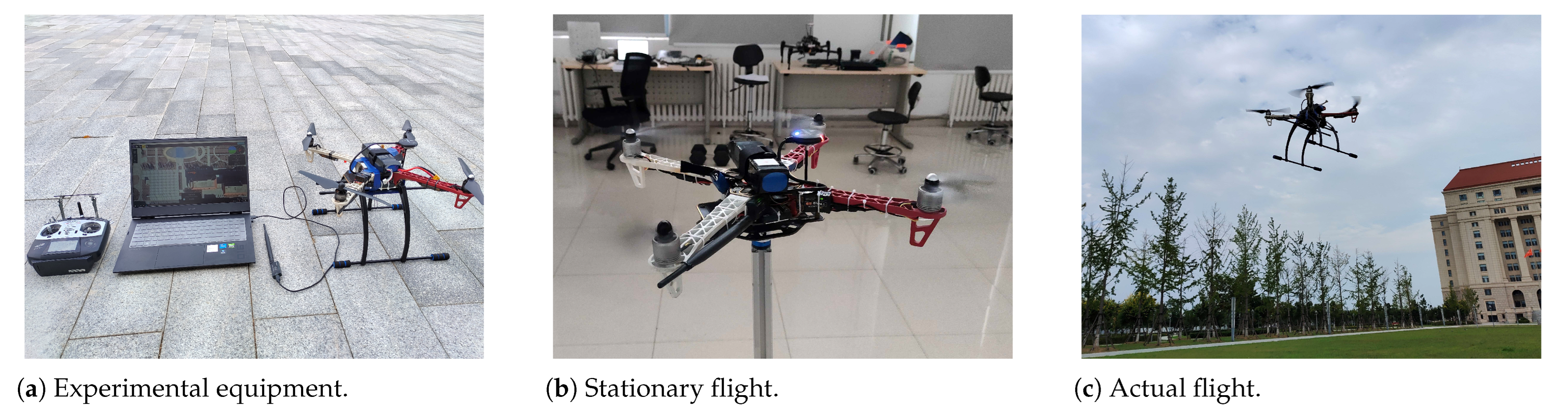
5.2. Experiment and Results Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Wu, H.; Suzuki, S.; Namiki, A.; Wang, W. Design and Application of a UAV Autonomous Inspection System for High-Voltage Power Transmission Lines. Remote Sens. 2023, 15, 865. [Google Scholar] [CrossRef]
- Darvishpoor, S.; Roshanian, J.; Raissi, A.; Hassanalian, M. Configurations, flight mechanisms, and applications of unmanned aerial systems: A review. Prog. Aerosp. Sci. 2020, 121, 100694. [Google Scholar] [CrossRef]
- Ge, W.; Li, X.; Jing, L.; Han, J.; Wang, F. Monitoring canopy-scale autumn leaf phenology at fine-scale using unmanned aerial vehicle (UAV) photography. Agric. For. Meteorol. 2023, 332, 109372. [Google Scholar] [CrossRef]
- Meng, Y.; Xu, J.; He, J.; Tao, S.; Gupta, D.; Moreira, C.; Tiwari, P.; Guo, C. A cluster UAV inspired honeycomb defense system to confront military IoT: A dynamic game approach. Soft Comput. 2023, 27, 1033–1043. [Google Scholar] [CrossRef]
- Bartulović, V.; Trzun, Z.; Hoić, M. Use of Unmanned Aerial Vehicles in Support of Artillery Operations. Strateg. Znan. Čas. Hrvat. Vojn. Učil. Dr. Franjo Tuđman 2023, 7, 71–92. [Google Scholar]
- Viswanathan, S.P.; Sanyal, A.K.; Samiei, E. Integrated guidance and feedback control of underactuated robotics system in SE (3). J. Intell. Robot. Syst. 2018, 89, 251–263. [Google Scholar] [CrossRef]
- Lopez-Sanchez, I.; Moreno-Valenzuela, J. PID control of quadrotor UAVs: A survey. Annu. Rev. Control 2023, 56, 100900. [Google Scholar] [CrossRef]
- El-Shafei, M.A.; El-Hawwary, M.I.; Emara, H.M. Implementation of fractional-order PID controller in an industrial distributed control system. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; pp. 713–718. [Google Scholar]
- Alphonsus, E.R.; Abdullah, M.O. A review on the applications of programmable logic controllers (PLCs). Renew. Sustain. Energy Rev. 2016, 60, 1185–1205. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Ji, G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef]
- Andrade, F.A.; Guedes, I.P.; Carvalho, G.F.; Zachi, A.R.; Haddad, D.B.; Almeida, L.F.; de Melo, A.G.; Pinto, M.F. Unmanned aerial vehicles motion control with fuzzy tuning of cascaded-pid gains. Machines 2021, 10, 12. [Google Scholar] [CrossRef]
- Feng, Y.; Wu, M.; Chen, X.; Chen, L.; Du, S. A fuzzy PID controller with nonlinear compensation term for mold level of continuous casting process. Inf. Sci. 2020, 539, 487–503. [Google Scholar] [CrossRef]
- Gavilan, F.; Vazquez, R.; Camacho, E.F. An iterative model predictive control algorithm for UAV guidance. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2406–2419. [Google Scholar] [CrossRef]
- Azar, A.T.; Serrano, F.E.; Koubaa, A.; Kamal, N.A. Backstepping h-infinity control of unmanned aerial vehicles with time varying disturbances. In Proceedings of the 2020 First International Conference of Smart Systems and Emerging Technologies (SMARTTECH), Riyadh, Saudi Arabia, 3–5 November 2020; pp. 243–248. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Meng, X.; Yu, H.; Zhang, J.; Xu, T.; Wu, H. Liquid level control of four-tank system based on active disturbance rejection technology. Measurement 2021, 175, 109146. [Google Scholar] [CrossRef]
- Liu, S.; Li, D.; Tian, B.; Xue, W.; Sun, L.; Zhu, M. A hybrid receding horizon optimization and active disturbance rejection control of boiler superheated steam temperature. In Process Safety and Environmental Protection; Elsevier: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Dong, Q.; Li, Q. Current control of BLDCM based on fuzzy adaptive ADRC. In Proceedings of the 2009 Ninth International Conference on Hybrid Intelligent Systems, Shenyang, China, 12–14 August 2009; Volume 3, pp. 355–358. [Google Scholar]
- Qiao, H.; Meng, H.; Ke, W.; Gao, Q.; Wang, S. Adaptive control of missile attitude based on BP-ADRC. Aircr. Eng. Aerosp. Technol. 2020, 92, 1475–1481. [Google Scholar] [CrossRef]
- Su, Z.Q.; Zhou, M.; Han, F.F.; Zhu, Y.W.; Song, D.L.; Guo, T.T. Attitude control of underwater glider combined reinforcement learning with active disturbance rejection control. J. Mar. Sci. Technol. 2019, 24, 686–704. [Google Scholar] [CrossRef]
- Huang, Y.; Xue, W. Active disturbance rejection control: Methodology and theoretical analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef]
- Gao, B.; Zheng, L.; Shen, W.; Zhang, W. A Summary of Parameter Tuning of Active Disturbance Rejection Controller. Recent Adv. Electr. Electron. Eng. Former. Recent Patents Electr. Electron. Eng. 2023, 16, 180–196. [Google Scholar] [CrossRef]
- Sun, L.; Jin, Y.; You, F. Active disturbance rejection temperature control of open-cathode proton exchange membrane fuel cell. Appl. Energy 2020, 261, 114381. [Google Scholar] [CrossRef]
- Cai, Z.; Lou, J.; Zhao, J.; Wu, K.; Liu, N.; Wang, Y.X. Quadrotor trajectory tracking and obstacle avoidance by chaotic grey wolf optimization-based active disturbance rejection control. Mech. Syst. Signal Process. 2019, 128, 636–654. [Google Scholar] [CrossRef]
- Chiumeo, R.; Raggini, D.; Veroni, A.; Clerici, A. Comparative Analysis of PI and ADRC Control through CHIL Real Time Simulations of a DC-DC DAB into a Multi-Terminal MVDC/LVDC Distribution Network. Energies 2022, 15, 7631. [Google Scholar] [CrossRef]
- Zheng, Y.; Tao, J.; Sun, Q.; Sun, H.; Sun, M.; Chen, Z. An intelligent course keeping active disturbance rejection controller based on double deep Q-network for towing system of unpowered cylindrical drilling platform. Int. J. Robust Nonlinear Control 2021, 31, 8463–8480. [Google Scholar] [CrossRef]
- Huang, T.; Kang, Y.; Du, S.; Zhang, Q.; Luo, Z.; Tang, Q.; Yang, K. A survey of modeling and control in ball screw feed-drive system. Int. J. Adv. Manuf. Technol. 2022, 121, 2923–2946. [Google Scholar] [CrossRef]
- Plenz, D.; Ribeiro, T.L.; Miller, S.R.; Kells, P.A.; Vakili, A.; Capek, E.L. Self-organized criticality in the brain. Front. Phys. 2021, 9, 639389. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S. BAS: Beetle antennae search algorithm for optimization problems. arXiv 2017, arXiv:1710.10724. [Google Scholar] [CrossRef]
- Dorigo, M. Ant algorithms solve difficult optimization problems. In Proceedings of the Advances in Artificial Life: 6th European Conference, ECAL 2001 Prague, Czech Republic, 10–14 September 2001; Proceedings. Springer: Berlin/Heidelberg, Germany, 2001; pp. 11–22. [Google Scholar]
- Deepa, O.; Senthilkumar, A. Swarm intelligence from natural to artificial systems: Ant colony optimization. Netw. Graph-Hoc 2016, 8, 9–17. [Google Scholar]
- Khan, A.T.; Cao, X.; Li, S.; Hu, B.; Katsikis, V.N. Quantum beetle antennae search: A novel technique for the constrained portfolio optimization problem. Sci. China Inf. Sci. 2021, 64, 152204. [Google Scholar] [CrossRef]
- Shi, H.; Li, W. Artificial neural networks with ant colony optimization for assessing performance of residential buildings. In Proceedings of the 2009 International Conference on Future BioMedical Information Engineering (FBIE), Sanya, China, 13–14 December 2009; pp. 379–382. [Google Scholar]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef]
- Dai, X.; Ke, C.; Quan, Q.; Cai, K.Y. RFlySim: Automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerosp. Sci. Technol. 2021, 114, 106727. [Google Scholar] [CrossRef]
- Yu, F.; Fu, X.; Li, H.; Dong, G. Improved roulette wheel selection-based genetic algorithm for TSP. In Proceedings of the 2016 International Conference on Network and Information Systems for Computers (ICNISC), Wuhan, China, 15–17 April 2016; pp. 151–154. [Google Scholar]
- Gage, S. Creating a unified graphical wind turbulence model from multiple specifications. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; p. 5529. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entry | PID | ADRC | BACADRC | |
|---|---|---|---|---|
| No Interference | Rise Time/s | 0.19 | 0.14 | 0.18 |
| Steady-State Error/rad | 0 | 0.0001 | 0.00016 | |
| Deviation ratio/% | 0 | 0.05 | 0.08 | |
| Interference | Maximum Deviation/rad | 0.0068 | 0.0028 | 0.00021 |
| Deviation ratio/% | 3.4 | 1.4 | 0.105 | |
| Interference | Maximum Deviation/rad | 0.033 | 0.0035 | 0.001 |
| Deviation ratio/% | 16.5 | 1.75 | 0.5 |
| Entry | PID | ADRC | BACADRC | |
|---|---|---|---|---|
| No Interference | Peak Deviation/rad | 0.00285 | 0.0089 | 0.0031 |
| Deviation ratio/% | 1.427 | 4.45 | 1.55 | |
| Lag time/s | 0.125 | 0.085 | 0.125 | |
| Interference | Peak Deviation/rad | 0.002 | 0.0066 | 0.0031 |
| Deviation ratio/% | 1 | 3.3 | 1.55 | |
| Lag time/s | 0.125 | 0.085 | 0.125 | |
| Interference | Peak Deviation/rad | 0.03 | 0.0071 | 0.0031 |
| Deviation ratio/% | 15 | 3.546 | 1.55 | |
| Lag time/s | 0.125 | 0.075 | 0.125 |
| Controllers | Maximum Angle (rad) | Average Value | Standard Deviation |
|---|---|---|---|
| PID | 0.3366 | 0.0800 | 0.1164 |
| ADRC | 0.1799 | 0.0488 | 0.0556 |
| BACADRC | 0.0895 | 0.0255 | 0.0299 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Yang, F.; Zhong, L.; Wu, H.; Jiang, X.; Chukalin, A.V. Attitude Control of UAVs with Search Optimization and Disturbance Rejection Strategies. Mathematics 2023, 11, 3794. https://doi.org/10.3390/math11173794
Li W, Yang F, Zhong L, Wu H, Jiang X, Chukalin AV. Attitude Control of UAVs with Search Optimization and Disturbance Rejection Strategies. Mathematics. 2023; 11(17):3794. https://doi.org/10.3390/math11173794
Chicago/Turabian StyleLi, Wensheng, Fanke Yang, Liqiang Zhong, Hao Wu, Xiangyuan Jiang, and Andrei V. Chukalin. 2023. "Attitude Control of UAVs with Search Optimization and Disturbance Rejection Strategies" Mathematics 11, no. 17: 3794. https://doi.org/10.3390/math11173794
APA StyleLi, W., Yang, F., Zhong, L., Wu, H., Jiang, X., & Chukalin, A. V. (2023). Attitude Control of UAVs with Search Optimization and Disturbance Rejection Strategies. Mathematics, 11(17), 3794. https://doi.org/10.3390/math11173794