

Projectile Motion in Special Theory of Relativity: Re-Investigation and New Dynamical Properties in Vacuum

 ,
,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Formulation Using Newton’s Second Law in Relativistic Form
3. Solutions and Analysis
4. Special Case: Non-Relativistic Projectile (NRP)
5. Properties of the Relativistic Projectile (RP)
5.1. Time of Maximum Height
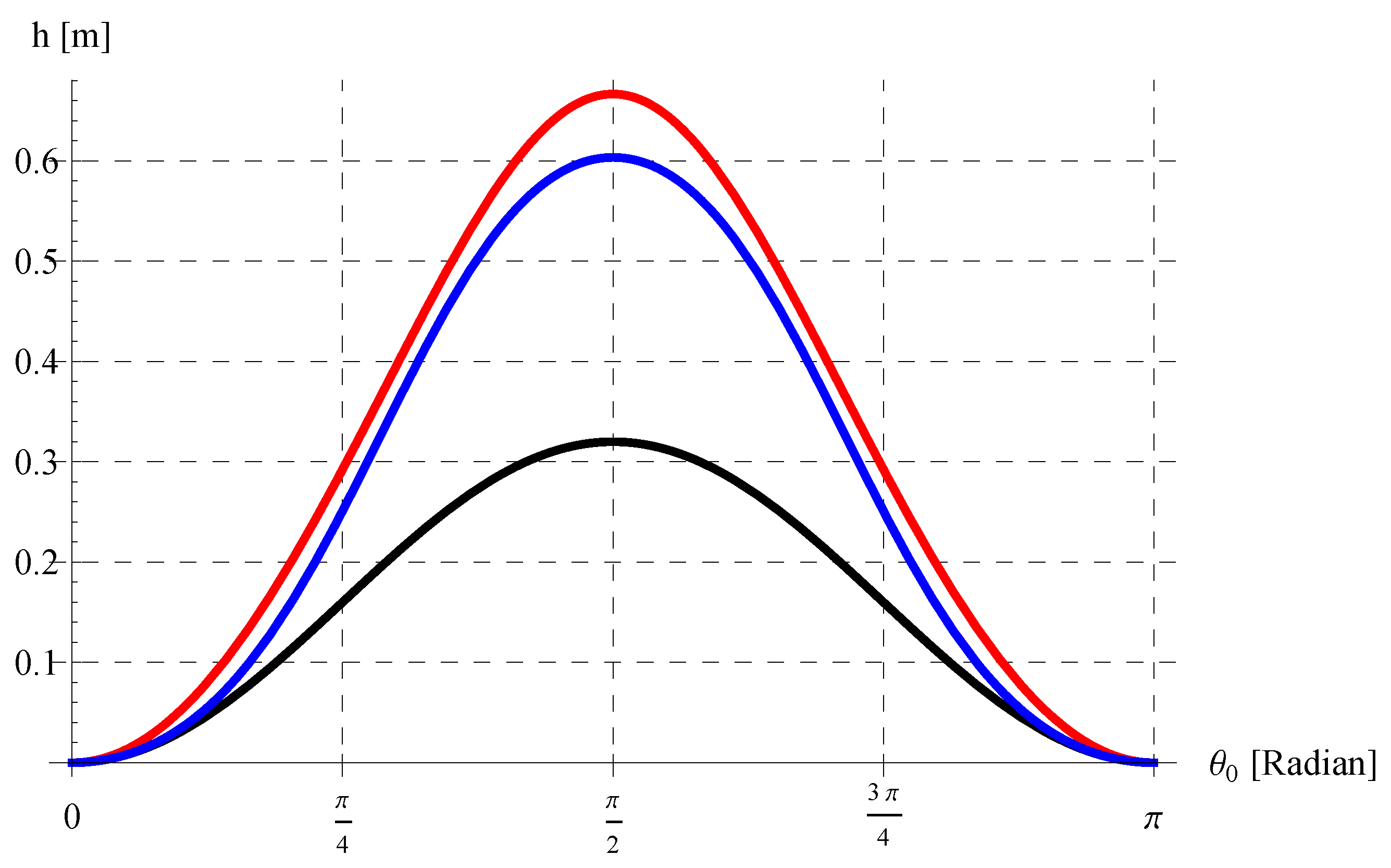
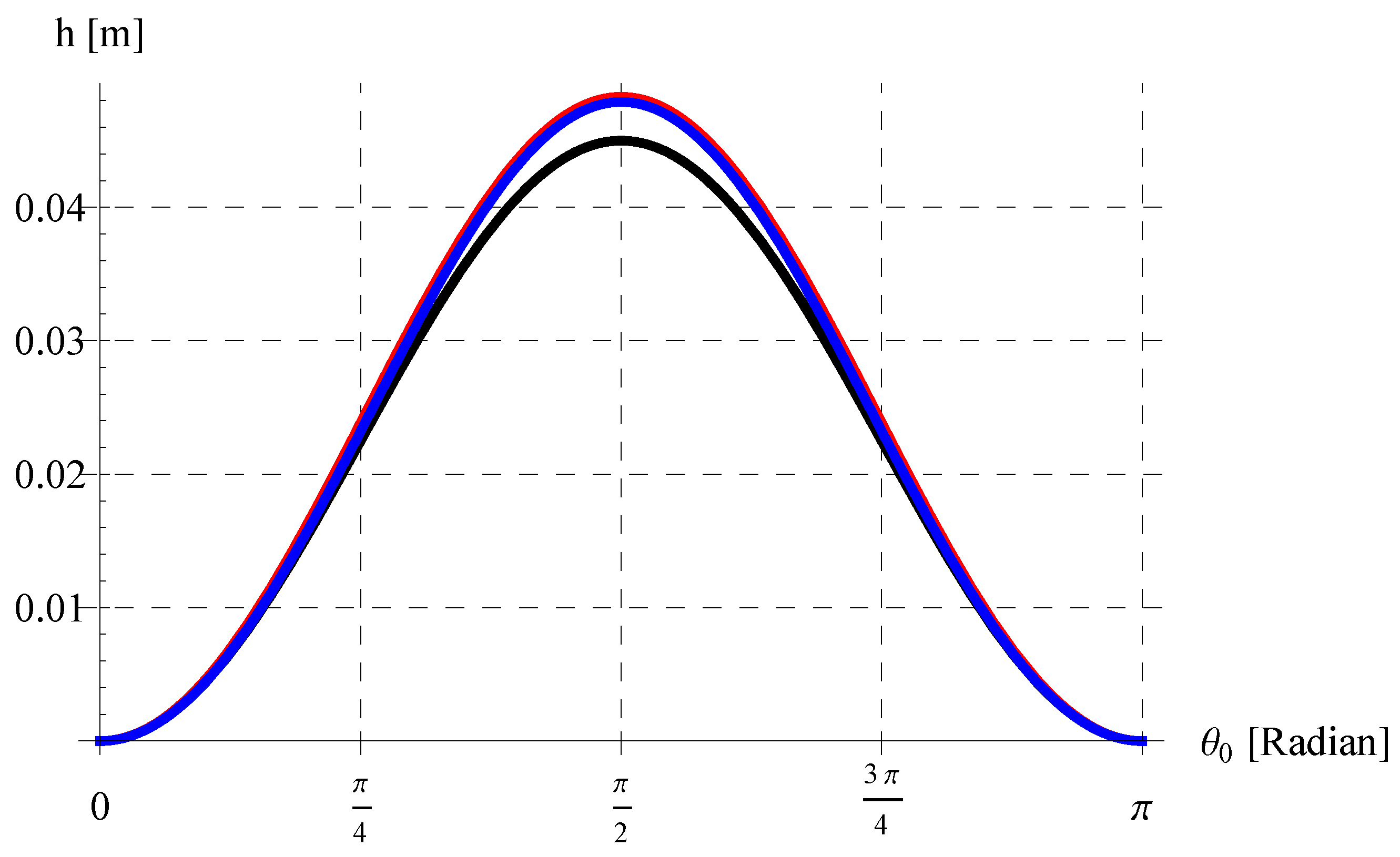
5.2. Maximum Height h
5.3. Time of Flight
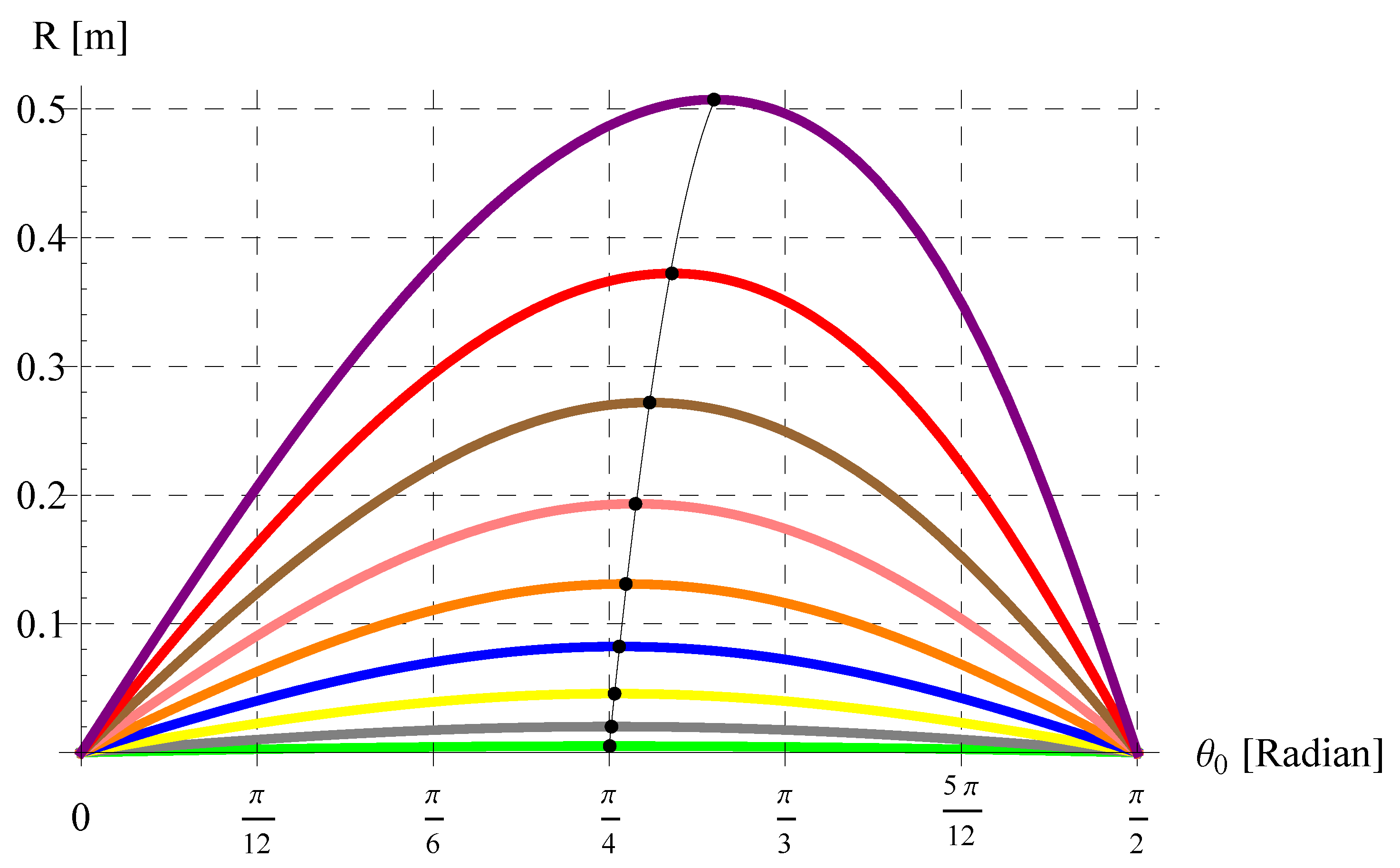
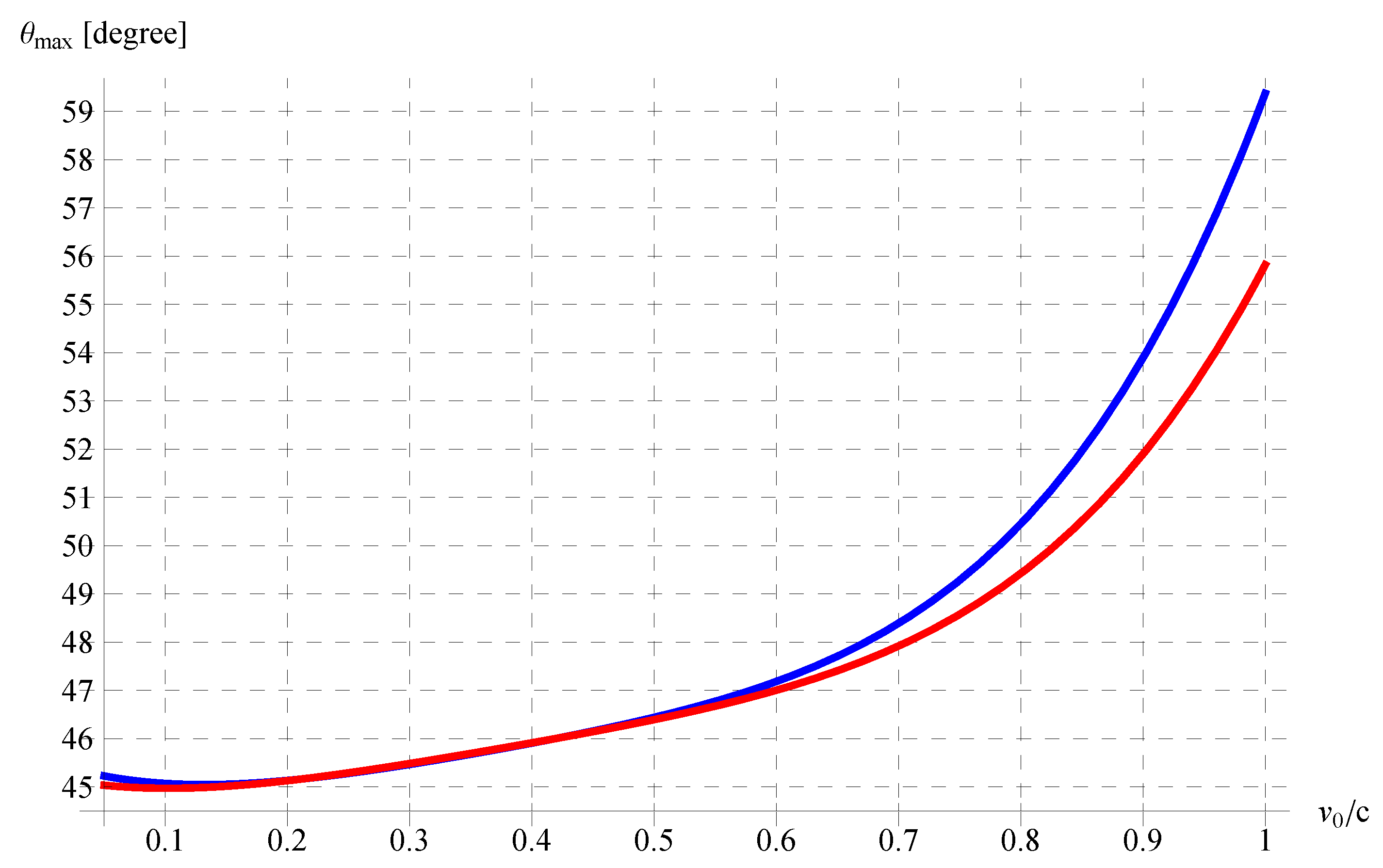
5.4. Range R
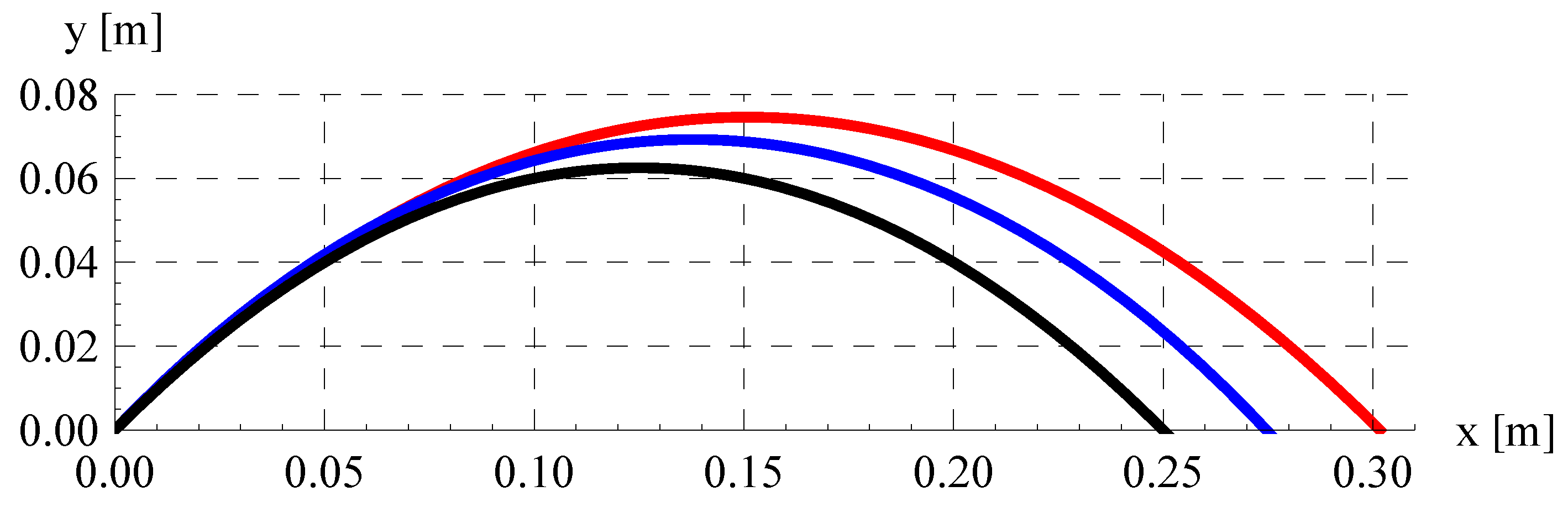
5.5. Trajectory
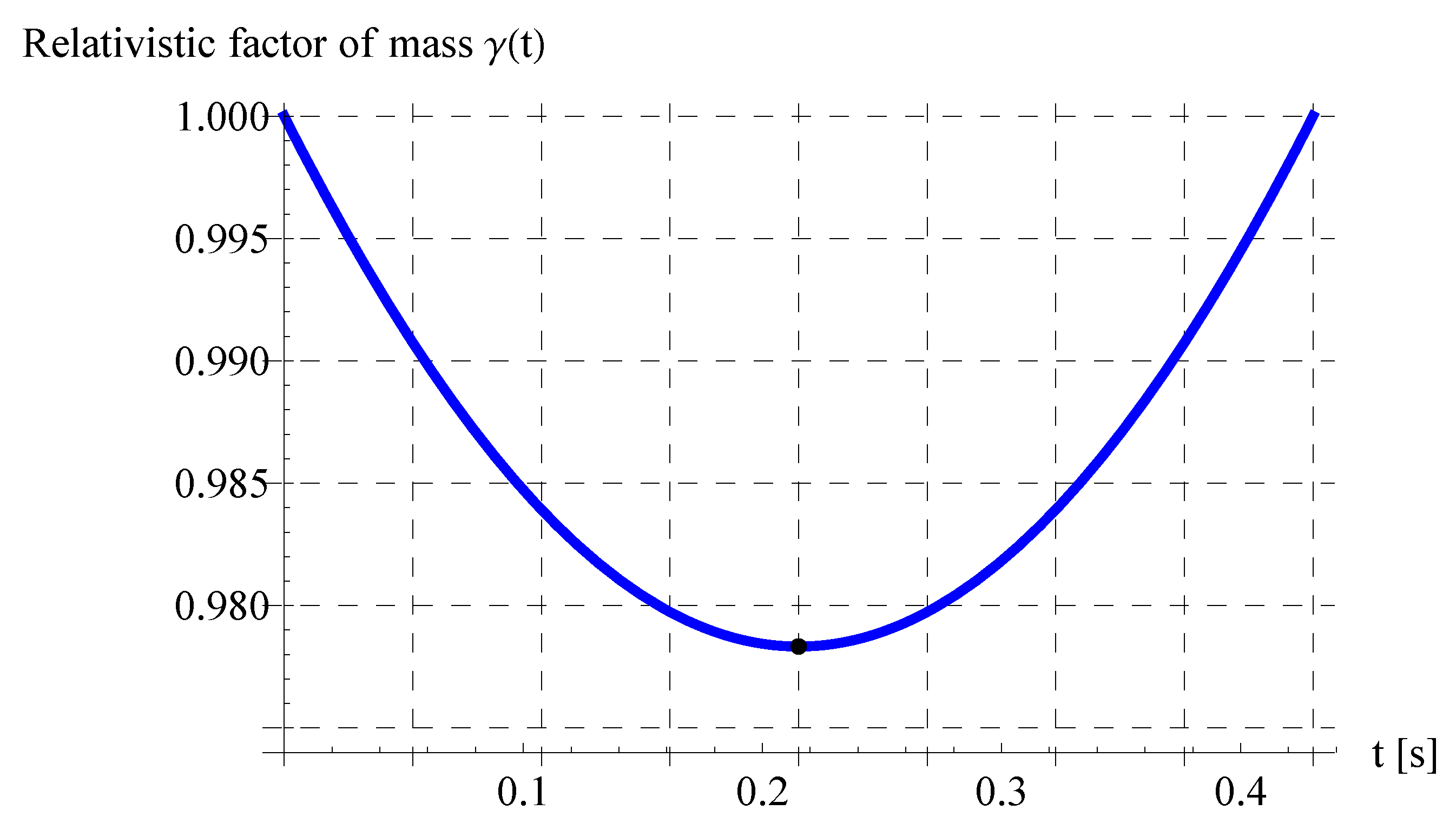
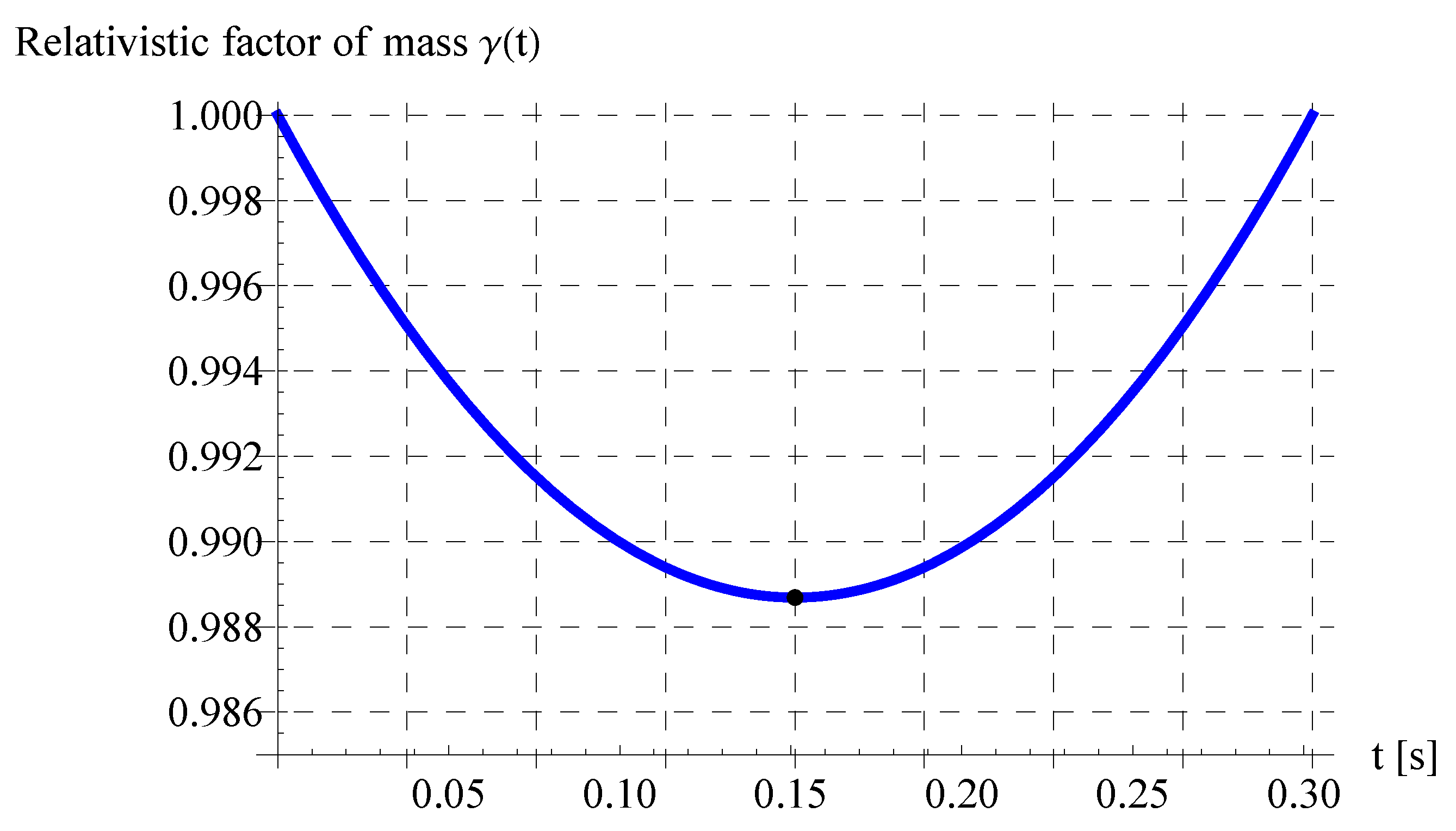
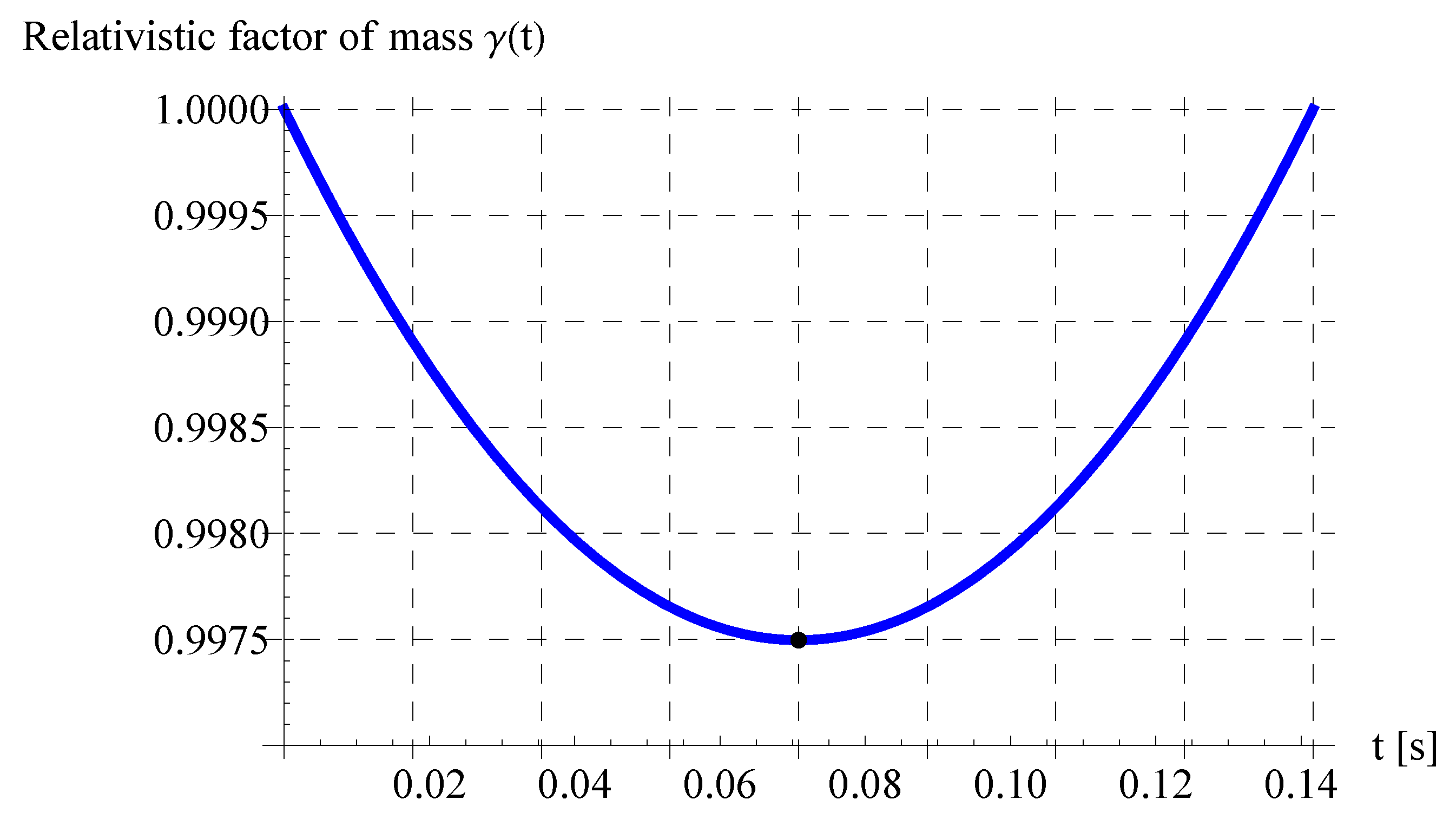
5.6. Minimum Mass
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Formulation Using Covariant Equations
Appendix B. Properties of the NRP: Special Cases of the Current RP
References
- Goldstein, H. Classical Mechanics; Addison-Wesley: San Francisco, CA, USA, 1980. [Google Scholar]
- Bedford, A.; Fowler, W. Engineering Mechanics; Addison-Wesley: San Francisco, CA, USA, 1996. [Google Scholar]
- Hayen, J.C. Projectile motion in a resistant medium. Part I: Exact solution and prop-erties. Int. J.-Non-Linear Mech. 2003, 38, 357–369. [Google Scholar] [CrossRef]
- Hayen, J.C. Projectile motion in a resistant medium. Part II: Approximate solution and estimates. Int. J.-Non-Linear Mech. 2003, 38, 371–380. [Google Scholar] [CrossRef]
- Weinacht, P.; Cooper, G.R.; Newill, J.F. Analytical Prediction of Trajectories for High-Velocity Direct-Fire Munitions; Technical report ARL-TR-3567; US Army Research Laboratory: Adelphi, MD, USA, 2005. [Google Scholar]
- Yabushita, K.; Yamashita, M.; Tsuboi, K. An analytic solution of projectile motion with the quadratic resistance law using the homotopy analysis method. J. Phys. A Math. Theor. 2007, 40, 8403–8416. [Google Scholar] [CrossRef]
- Benacka, J. Solution to projectile motion with quadratic drag and graphing the tra-jectory in spreadsheets. Int. J. Math. Educ. Sci. Technol. 2010, 41, 373–378. [Google Scholar] [CrossRef]
- Benacka, J. On high-altitude projectile motion. J. Phys. 2011, 89, 1003–1008. [Google Scholar] [CrossRef]
- Ebaid, A. Analysis of projectile motion in view of the fractional calculus. Appl. Math. Model. 2011, 35, 1231–1239. [Google Scholar] [CrossRef]
- Ahmad, B.; Batarfi, H.; Nieto, J.J.; Otero-Zarraquinos, O.; Shammakh, W. Projectile motion via Riemann-Liouville calculus. Adv. Differ. Equ. 2015, 2015, 63. [Google Scholar] [CrossRef]
- Rosales, J.J.; Guia, M.; Gomez, F.; Aguilar, F.; Martinez, J. Two-dimensional fractional projectile motion in a resisting medium. Cent. Eur. J. Phys. 2014, 12, 517–520. [Google Scholar] [CrossRef]
- Garcia, J.R.; Calderon, M.G.; Ortiz, J.M.; Baleanu, D.; de Santiago, C.S. Motion of a particle in a resisting medium using fractional calculus approach. Proc. Rom. Acad. Ser. A 2013, 14, 42–47. [Google Scholar]
- Ebaid, A.; El-Zahar, E.R.; Aljohani, A.F.; Salah, B.; Krid, M.; Machado, J.T. Analysis of the two-dimensional fractional projectile motion in view of the experimental data. Nonlinear Dyn. 2019, 97, 1711–1720. [Google Scholar] [CrossRef]
- Shahin, G.Y. Features of projectile motion in special theory of relativity. Eur. J. Phys. 2006, 27, 173. [Google Scholar] [CrossRef]
- Giffune, T.; Andrews, G. On the Relativistic Motion of Projectiles: On Range and Vertical Height, Undergraduate Research (NCUR) 2016; University of North Carolina Asheville: Asheville, NC, USA, 2016. [Google Scholar]
- Price, R.H. Projectiles, pendula, and special relativity. Am. J. Phys. 2005, 73, 433–438. [Google Scholar] [CrossRef]
- Katz, R. An Introduction to the Special Theory of Relativity, 1964 D; Van Nostrand Company, Inc.: New York, NY, USA, 1964. [Google Scholar]
- Kamel, A.; Ebaid, A.; El-Zahar, E.R.; Chteoui, R.; Seddek, L.F. Mathematical Physics of Time Dilation through Curved Trajectories with Applications. Mathematics 2023, 11, 2402. [Google Scholar] [CrossRef]
- Dygert, B.; Kinzel, C.; Junge, M.; Raymond, A.; Slivken, E.; Zhu, J. The bullet problem with discrete speeds. Electron. Commun. Probab. 2019, 24, 1–11. [Google Scholar] [CrossRef]
- Junge, M.; San Miguel, A.O.; Reeves, L.; Sánchez, C.R. Non-universality in clustered ballistic annihilation. Electron. Commun. Probab. 2023, 28, 1–12. [Google Scholar] [CrossRef]
- Gelfer, E.; Elkina, N.; Fedotov, A. Unexpected impact of radiation friction: Enhancing production of longitudinal plasma waves. Sci. Rep. 2018, 8, 6478. [Google Scholar] [CrossRef]
- Dong, P.; Reed, S.A.; Yi, S.A.; Kalmykov, S.; Shvets, G.; Matlis, N.H.; McGuffey, C.; Bulanov, S.S.; Chvykov, V.; Kalintchenko, G.; et al. Formation of optical bullets in laser-driven plasma bubble accelerators. AIP Conf. Proc. 2010, 1299, 171–173. [Google Scholar]
- Buck, A. Advanced Characterization and Control of Laser Wakefield Acceleration. Ph.D. Thesis, Ludwig-Maximilians-Universität München, Munich, Germany, 2011. [Google Scholar]
- Aharya, S.; Acosta, F.T.; Adamová, D.; Adolfsson, J.; Aggarwal, M.M.; Aglieri Rinella, G.; Agnello, M.; Agrawal, N.; Ahammed, Z.; Ahn, S.U.; et al. Neutral pion and η meson production at midrapidity in Pb-Pb collisions at 2.76 TeV. Phys. Rev. C 2018, 98, 1–28. [Google Scholar]
- Carbajo, S.; Granados, E.; Schimpf, D.; Sell, A.; Hong, K.H.; Moses, J.; Kärtner, F.X. Efficient generation of ultra-intense few-cycle radially polarized laser pulses. Opt. Lett. 2014, 39, 2487–2490. [Google Scholar] [CrossRef]
- Carbajo, S.; Nanni, E.A.; Wong, L.J.; Moriena, G.; Keathley, P.D.; Laurent, G.; Miller, R.D.; Kärtner, F.X. Direct longitudinal laser acceleration of electrons in free space. Phys. Rev. Accel. Beams 2016, 19, 21303. [Google Scholar] [CrossRef]
- El-Zahar, E.R.; Ebaid, A.; Aljohani, A.F.; Tenreiro Machado, J.; Baleanu, D. Re-Evaluating the Classical Falling Body Problem. Mathematics 2020, 8, 553. [Google Scholar] [CrossRef]
- Ebaid, A.; Alharbi, W.; Aljoufi, M.D.; El-Zahar, E.R. The Exact Solution of the Falling Body Problem in Three-Dimensions: Comparative Study. Mathematics 2020, 8, 1726. [Google Scholar] [CrossRef]
- Escobar, I.; Arribas, E.; Ramirez-Vazquez, R.; Belénde, A.Z. Projectile motion revis-ited: Does the distance between the launcher and the object always increase? J. King Saud Univ. Sci. 2022, 34, 101842. [Google Scholar] [CrossRef]
- Bradshaw, J.L. Projectile motion with quadratic drag. Am. J. Phys. 2023, 91, 258–263. [Google Scholar] [CrossRef]
- Said, A.; Mshewa, M.; Mwakipunda, G.; Ngata, M.; Mohamed, E. Computational Solution to the Problems of Projectile Motion under Significant Linear Drag Effect. Open J. Appl. Sci. 2023, 13, 508–528. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Algehyne, E.A.; Ebaid, A.; El-Zahar, E.R.; Aldhabani, M.S.; Areshi, M.; Al-Jeaid, H.K. Projectile Motion in Special Theory of Relativity: Re-Investigation and New Dynamical Properties in Vacuum. Mathematics 2023, 11, 3890. https://doi.org/10.3390/math11183890
Algehyne EA, Ebaid A, El-Zahar ER, Aldhabani MS, Areshi M, Al-Jeaid HK. Projectile Motion in Special Theory of Relativity: Re-Investigation and New Dynamical Properties in Vacuum. Mathematics. 2023; 11(18):3890. https://doi.org/10.3390/math11183890
Chicago/Turabian StyleAlgehyne, Ebrahem A., Abdelhalim Ebaid, Essam R. El-Zahar, Musaad S. Aldhabani, Mounirah Areshi, and Hind K. Al-Jeaid. 2023. "Projectile Motion in Special Theory of Relativity: Re-Investigation and New Dynamical Properties in Vacuum" Mathematics 11, no. 18: 3890. https://doi.org/10.3390/math11183890
APA StyleAlgehyne, E. A., Ebaid, A., El-Zahar, E. R., Aldhabani, M. S., Areshi, M., & Al-Jeaid, H. K. (2023). Projectile Motion in Special Theory of Relativity: Re-Investigation and New Dynamical Properties in Vacuum. Mathematics, 11(18), 3890. https://doi.org/10.3390/math11183890