
Stabilization of the GLV System with Asymptotically Unbounded External Disturbances

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- I.
- The stabilization of the controlled nominal GLV system is realized by two single input controllers (): a dynamic feedback controller and a nonlinear feedback controller;
- II.
- Three suitable filters are proposed to asymptotically estimate the corresponding unbounded disturbances, and then, the corresponding disturbance estimators () are presented;
- III.
- Two DE-based controllers () are proposed and used to achieve the stabilization of the GLV system.
2. Problem Formulation
3. Main Result
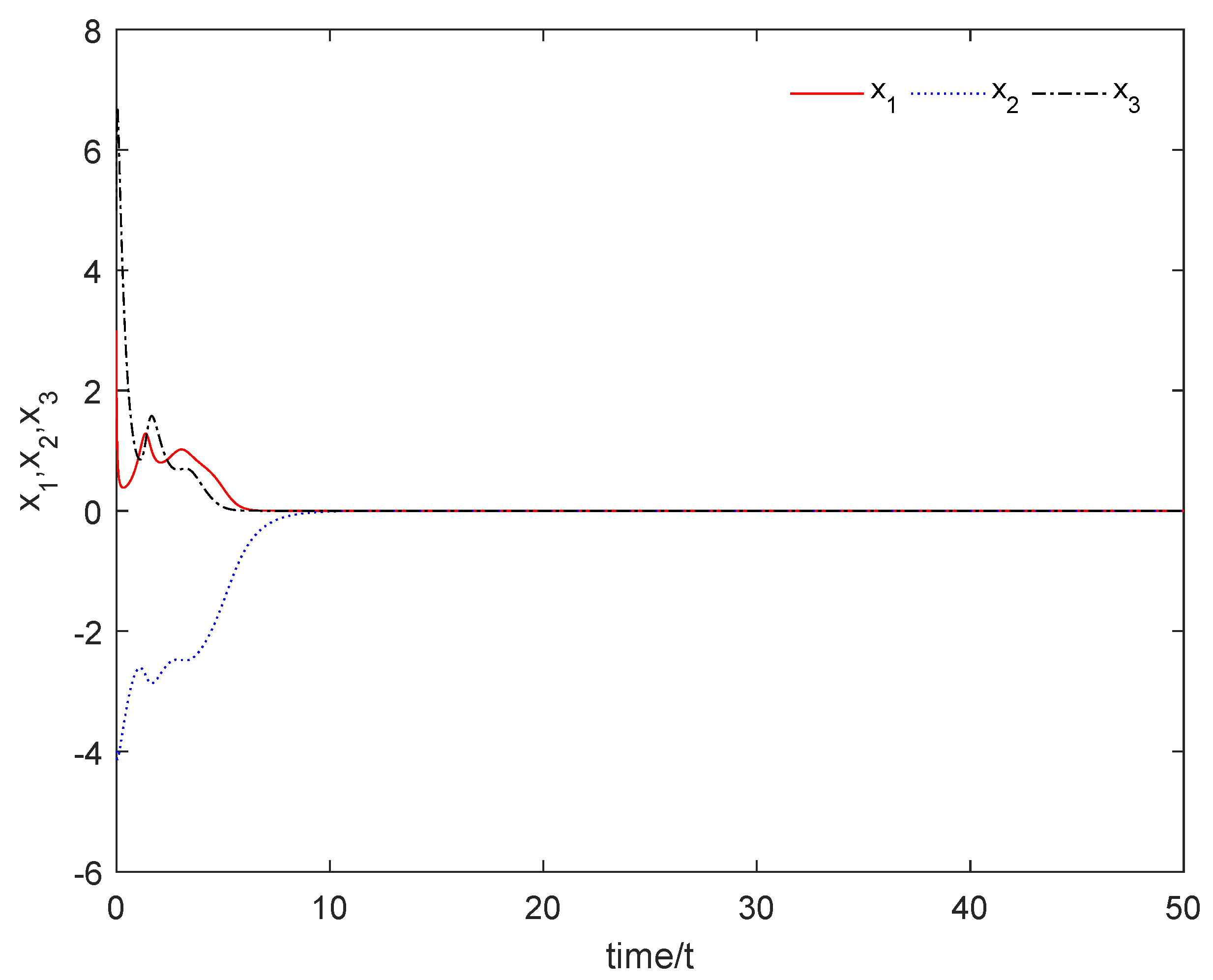
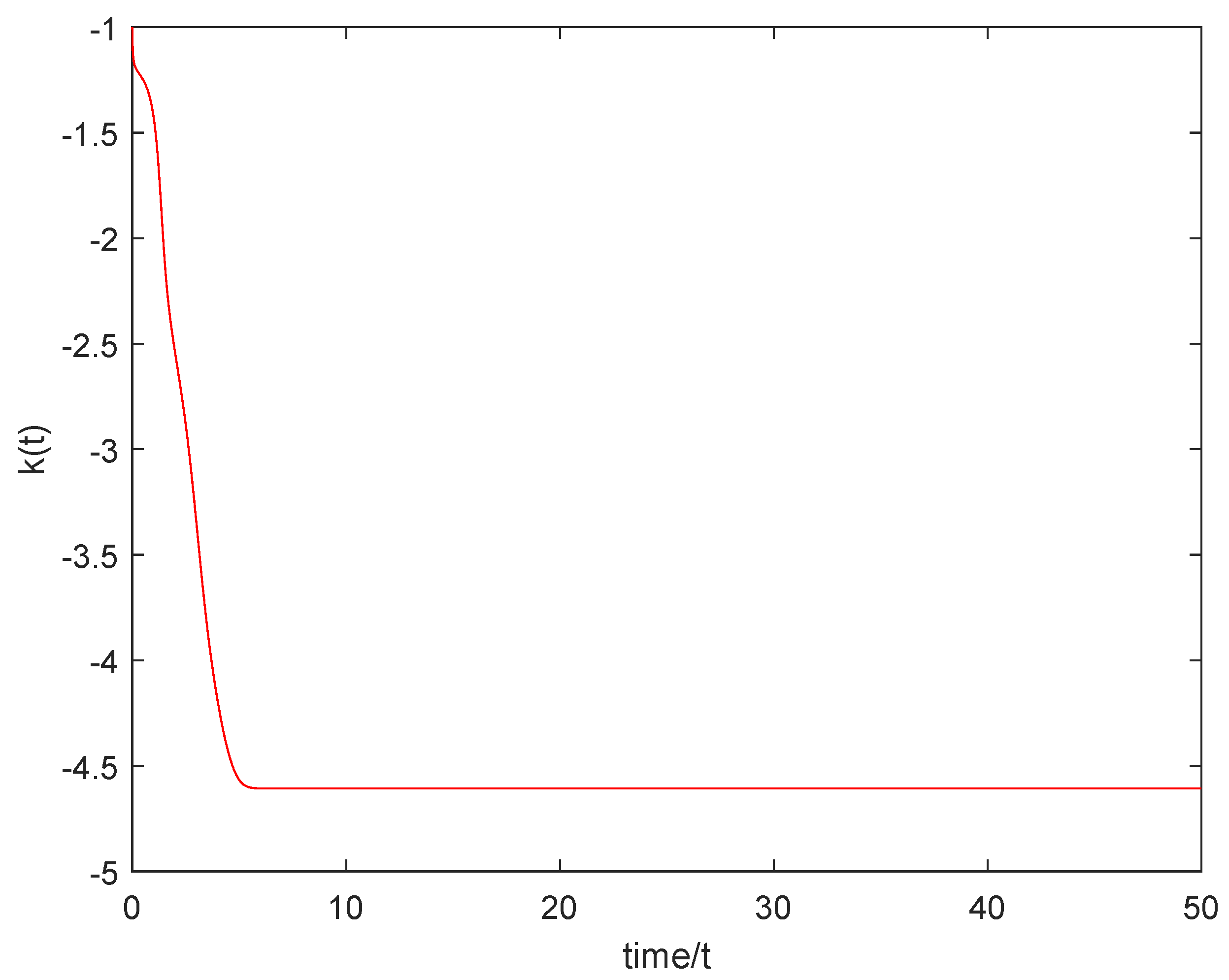
3.1. Stabilization of the Nominal GLV System
3.2. Filters’ Design
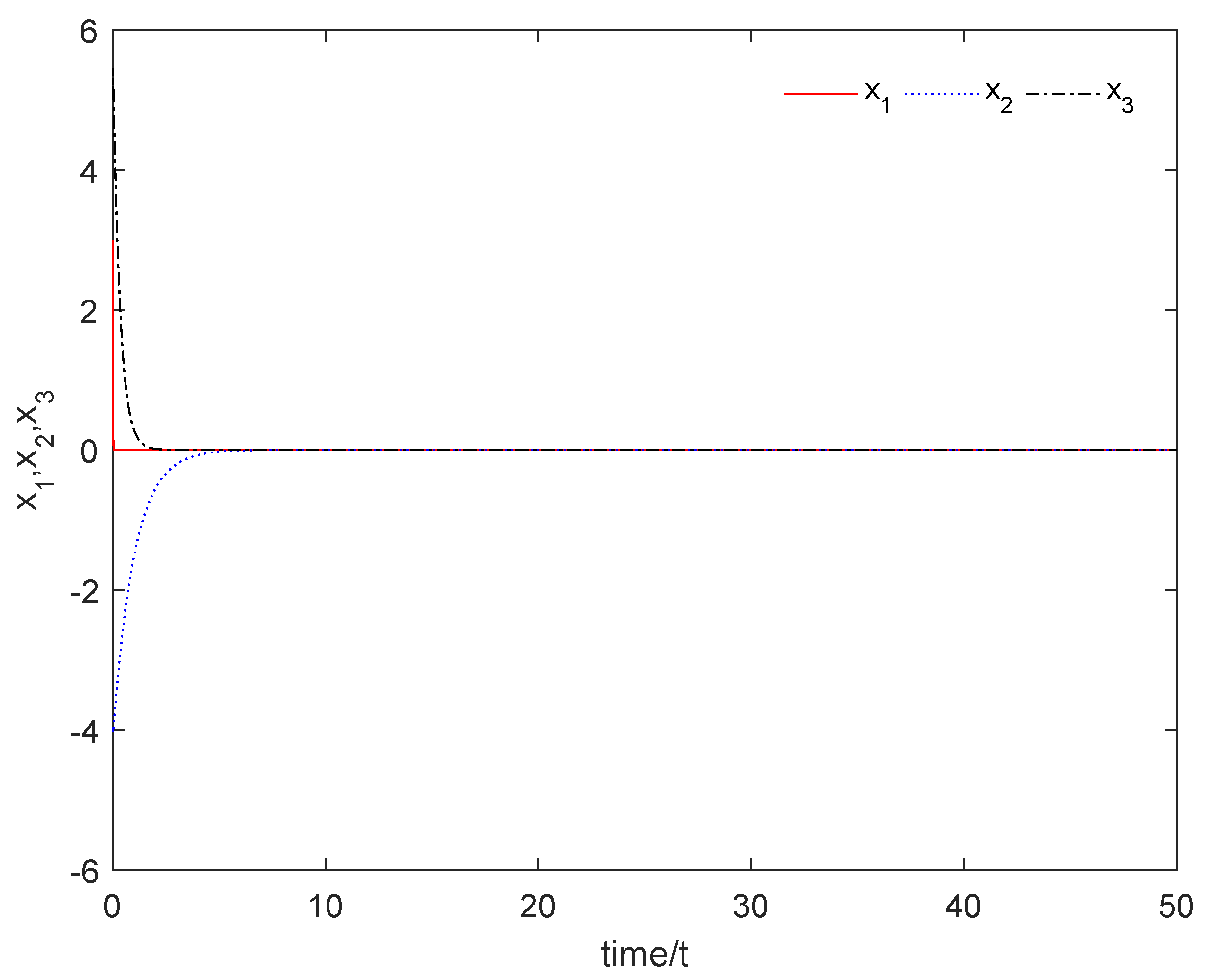
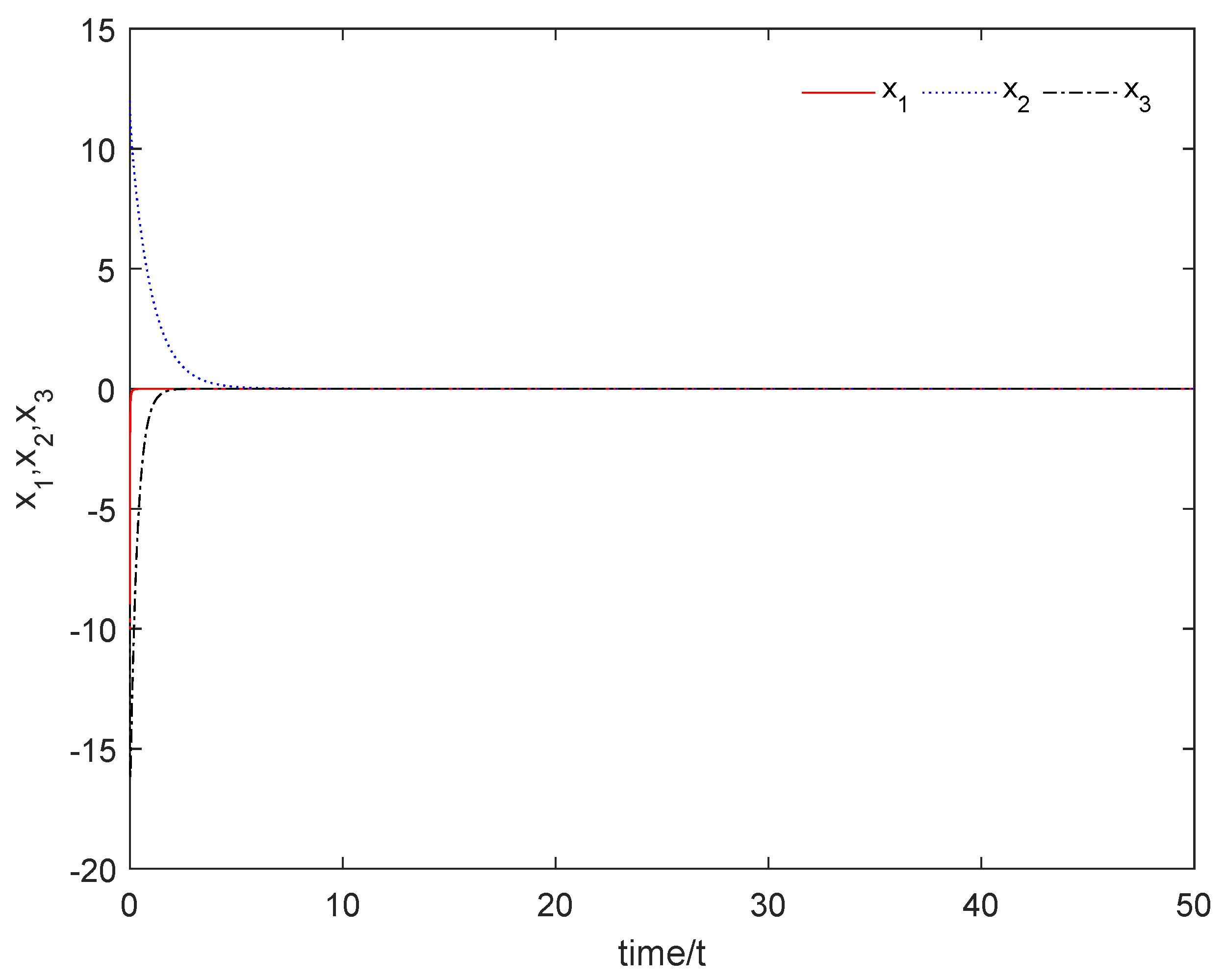
3.3. DE-Based Controllers’ Design
4. The Numerical Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lorenz, E.N. Deterministic non-periodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Ott, E.; Grebogi, C.; Yorke, J.A. Controlling chaos. Phys. Rev. Lett. 1990, 64, 1196–1199. [Google Scholar] [CrossRef] [PubMed]
- Gang, H.; Kaifen, H. Controlling chaos in systems described by partial differential equations. Phys. Rev. Lett. 1993, 71, 3794. [Google Scholar] [CrossRef] [PubMed]
- Kocarev, L.; Parlitz, U. General approach for chaotic synchronization with applications to communication. Phys. Rev. Lett. 1995, 74, 5028. [Google Scholar] [CrossRef]
- Guo, R. A simple adaptive controller for chaos and hyperchaos synchronization. Phys. Lett. A 2008, 372, 5593–5597. [Google Scholar] [CrossRef]
- Zhang, R.; Yang, S. Adaptive synchronization of fractional-order chaotic systems via a single driving variable. Nonlinear Dyn. 2011, 66, 831–837. [Google Scholar] [CrossRef]
- Yin, C.; Dadras, S.; Zhong, S.M.; Chen, Y. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Liang, W.; Lv, X. Li-Yorke chaos in a class of controlled delay difference equations. Chaos Solitons Fractals 2022, 157, 11942. [Google Scholar] [CrossRef]
- Asiain, E.; Garrido, R. Anti-Chaos control of a servo system using nonlinear model reference adaptive control. Chaos Solitons Fractals 2021, 143, 110581. [Google Scholar] [CrossRef]
- Long, L.; Zhao, J. Adaptive disturbance rejection for strict-feedback switched nonlinear systems using multiple Lyapunov functions. Int. J. Robust Nonlinear Control 2014, 24, 1887–1902. [Google Scholar] [CrossRef]
- Hu, J.; Chen, S.; Chen, L. Adaptive control for anti-synchronization of Chua’s chaotic system. Phys. Lett. 2005, 339, 455–460. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.; Chen, J. Robust control for a lass of non-affine nonlinear systems based on the uncertainty and disturbance estimator. IEEE Trans. Ind. Electron. 2015, 62, 5881–5888. [Google Scholar] [CrossRef]
- Kuperman, A.; Zhong, Q. UDE-based linear robust control for a class of nonlinear systems with application to wing rock motion stabilization. Nonlinear Dyn. 2015, 81, 789–799. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, B. Fault ride-through enhancement for grid-tied PV systems with robust control. IEEE Trans. Ind. Electron. 2018, 65, 2302–2312. [Google Scholar] [CrossRef]
- Li, Y.P.; Guo, R.W.; Liu, L.X. Projective synchronization of the generalized Lotka–Volterra system with asymptotically unbounded external disturbance. Phys. Scr. 2023, 98, 075221. [Google Scholar] [CrossRef]
- Han, Y.; Ding, J.; Du, L.; Lei, Y. Control and anti-control of chaos based on the moving largest Lyapunov exponent using reinforcement learning. Physica D 2021, 428, 133068. [Google Scholar] [CrossRef]
- Ding, J.; Lei, Y. Anti-Chaos control of a servo system using nonlinear model reference adaptive control. Physica D 2023, 451, 133767. [Google Scholar] [CrossRef]
- Cheng, H.; Li, H.; Dai, Q.; Yang, J. A deep reinforcement learning method to control chaos synchronization between two identical chaotic systems. Chaos Solitons Fractals 2023, 174, 113809. [Google Scholar] [CrossRef]
- Samardzija, N.; Greller, L.D. Explosive route to chaos through a fractal torus in a generalized Lotka–Volterra model. Bull. Math. Biol. 1988, 50, 465–491. [Google Scholar] [CrossRef]
- Kouichi, M. A concrete example with multiple limit cycles for three dimensional Lotka–Volterra systems. J. Math. Anal. Appl. 2018, 457, 1–9. [Google Scholar]
- Pastor, J.M.; Stucchi, L.; Galeano, J. Study of a factored general logistic model of population dynamics with inter-and intraspecific interactions. Ecol. Model. 2021, 444, 109475. [Google Scholar] [CrossRef]
- Long, T.; Liu, C.; Wang, S. The period function of quadratic generalized Lotka–Volterra systems without complex invariant. J. Differ. Equations 2022, 314, 491–517. [Google Scholar] [CrossRef]
- Manisha, K.; Chrali, B.; Veeresha, P. A chaos control strategy for the fractional 3D Lotka–Volterra like attractor. Math. Comput. Simul. 2023, 211, 1–22. [Google Scholar]
- Platonov, A.V. Analysis of the dynamical behavior of solutions for a class of hybrid generalized Lotka–Volterra models. Commun. Nonlinear Sci. And Numerical Simul. 2023, 119, 10768. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Guo, R. Stabilization of the GLV System with Asymptotically Unbounded External Disturbances. Mathematics 2023, 11, 4496. https://doi.org/10.3390/math11214496
Liu Z, Guo R. Stabilization of the GLV System with Asymptotically Unbounded External Disturbances. Mathematics. 2023; 11(21):4496. https://doi.org/10.3390/math11214496
Chicago/Turabian StyleLiu, Zhi, and Rongwei Guo. 2023. "Stabilization of the GLV System with Asymptotically Unbounded External Disturbances" Mathematics 11, no. 21: 4496. https://doi.org/10.3390/math11214496