
On the State-Feedback Controller Design for Polynomial Linear Parameter-Varying Systems with Pole Placement within Linear Matrix Inequality Regions

 ,
,  ,
,  ,
,  ,
,  , ,
, ,  ,
,  ,
,
Abstract
:1. Introduction
2. Notation
3. Preliminaries
3.1. Polynomial Linear Parameter-Varying Systems
3.2. Parameterized Linear Matrix Inequalities
3.3. LMI Region
4. Problem Definition
5. Controller Design and LMI Region Setup
5.1. Controller Design
5.2. PLMI Setup
6. Results
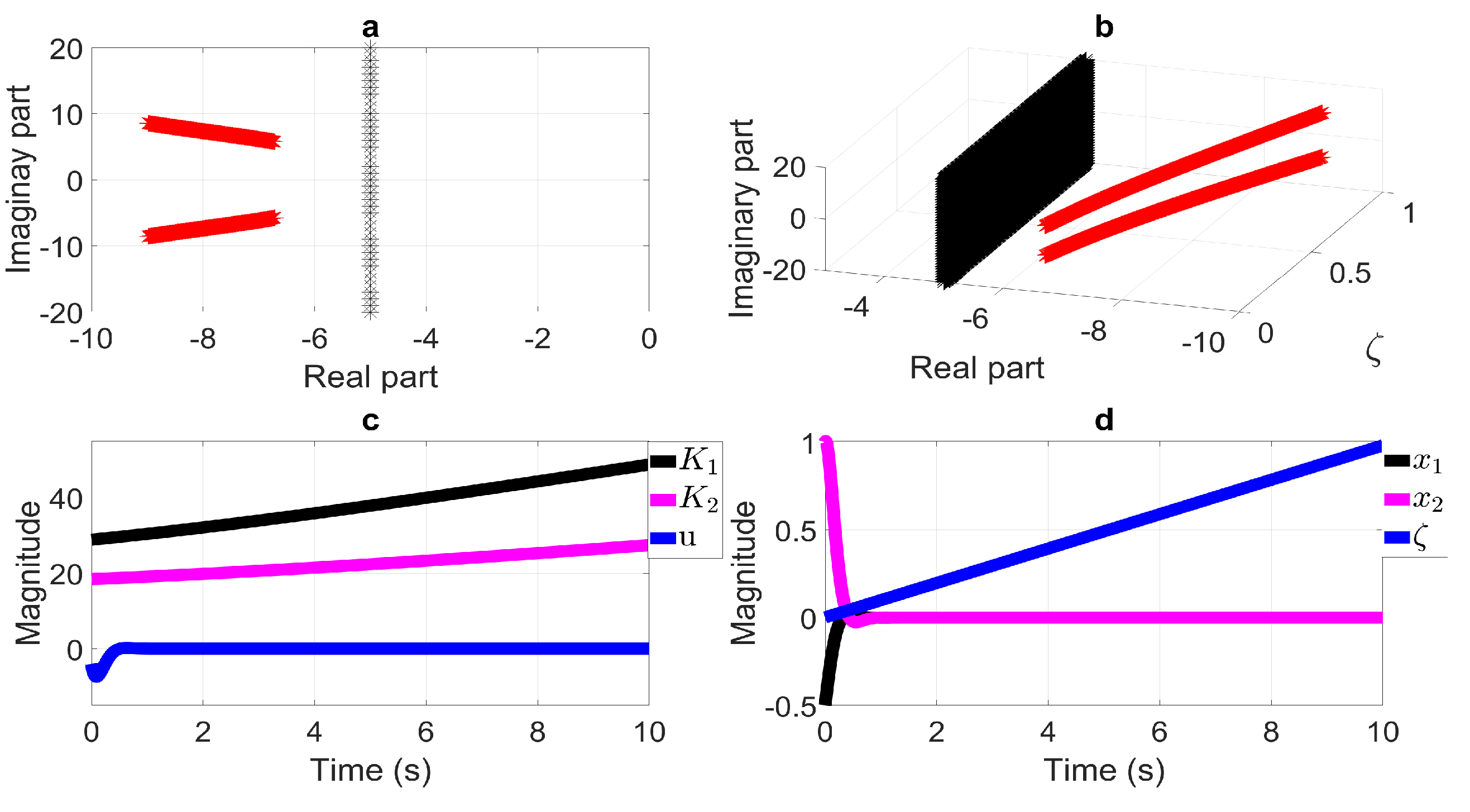
6.1. Half-Plane LMI Region
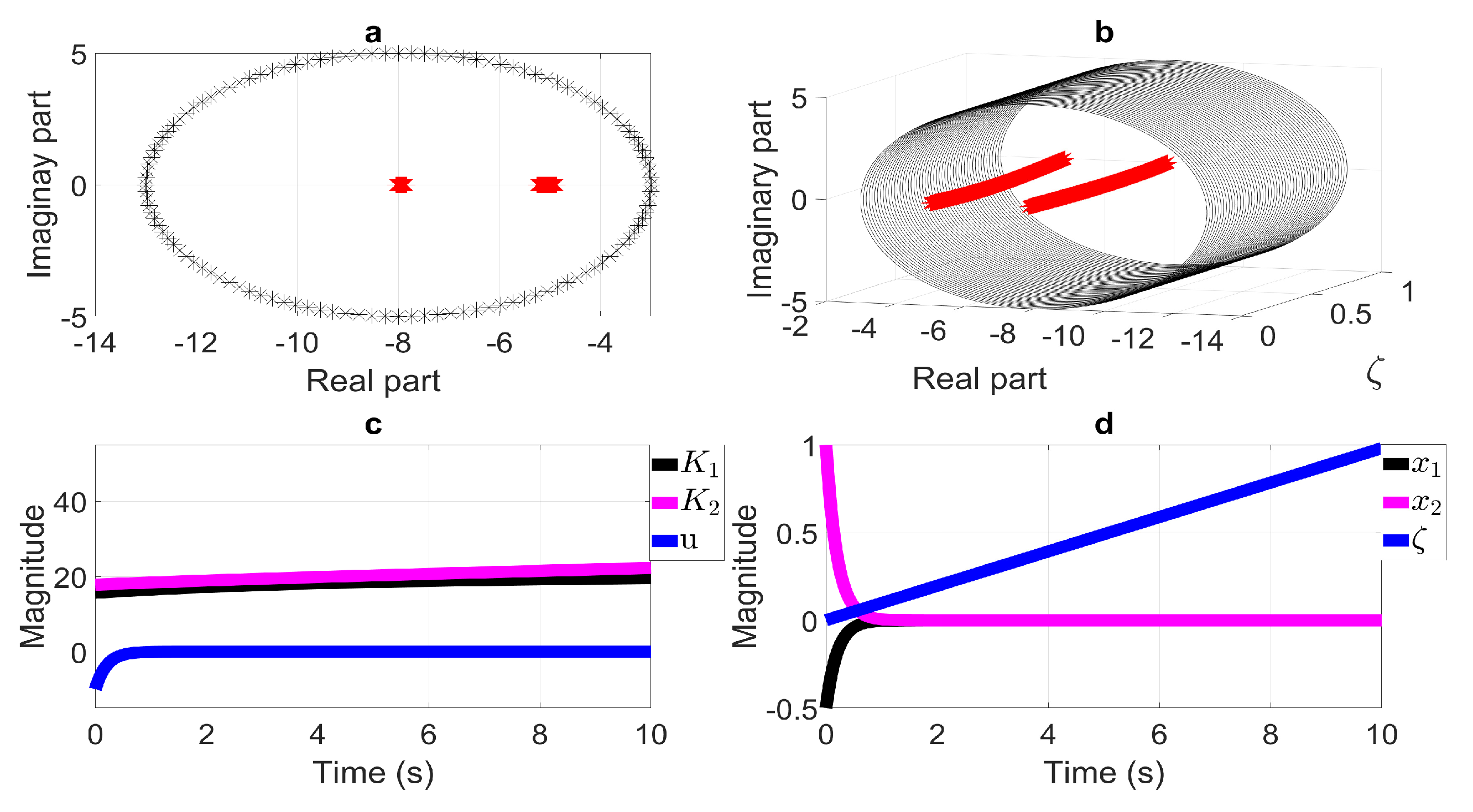
6.2. Disk LMI Region
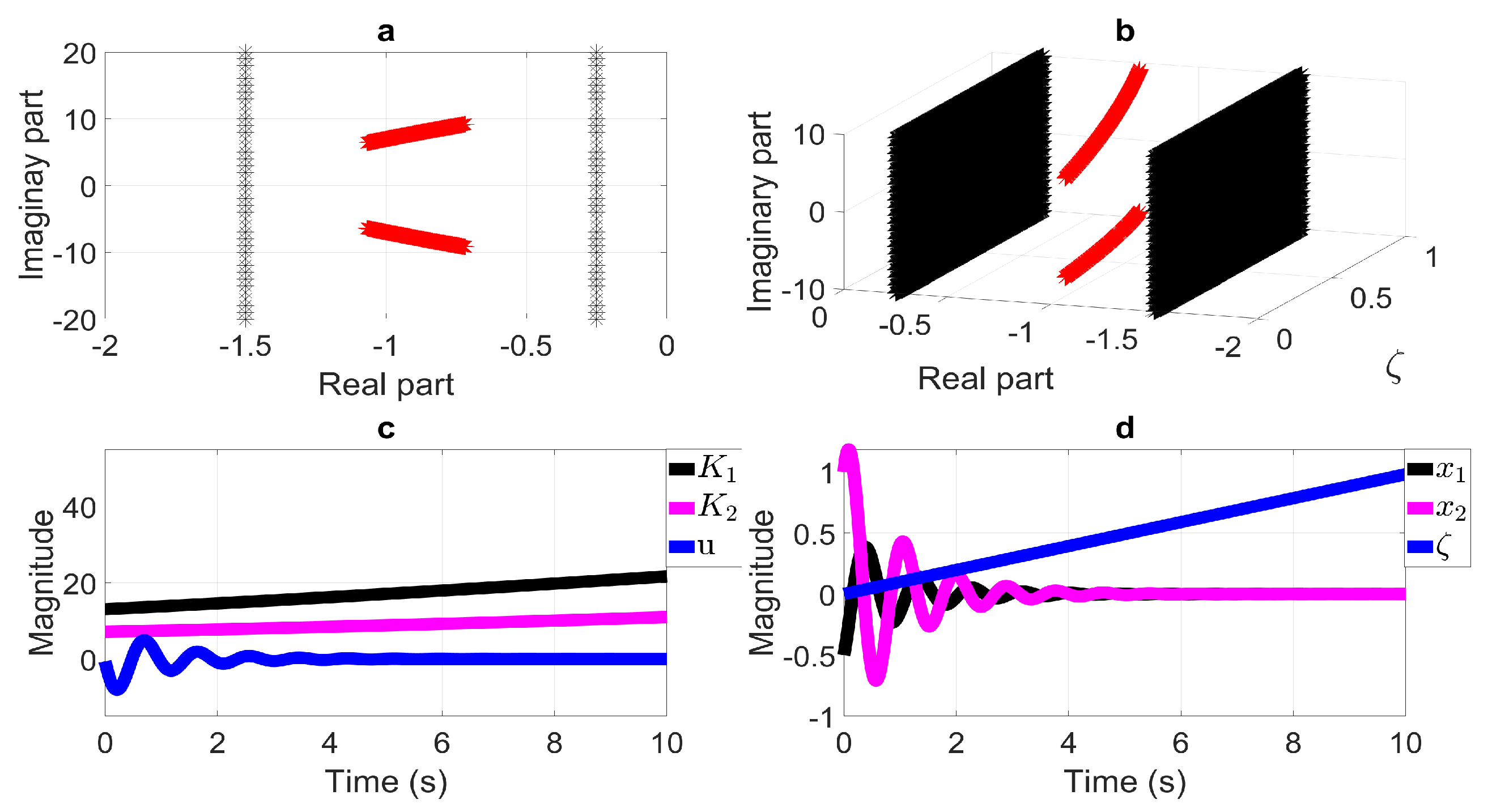
6.3. Vertical Bands LMI Region
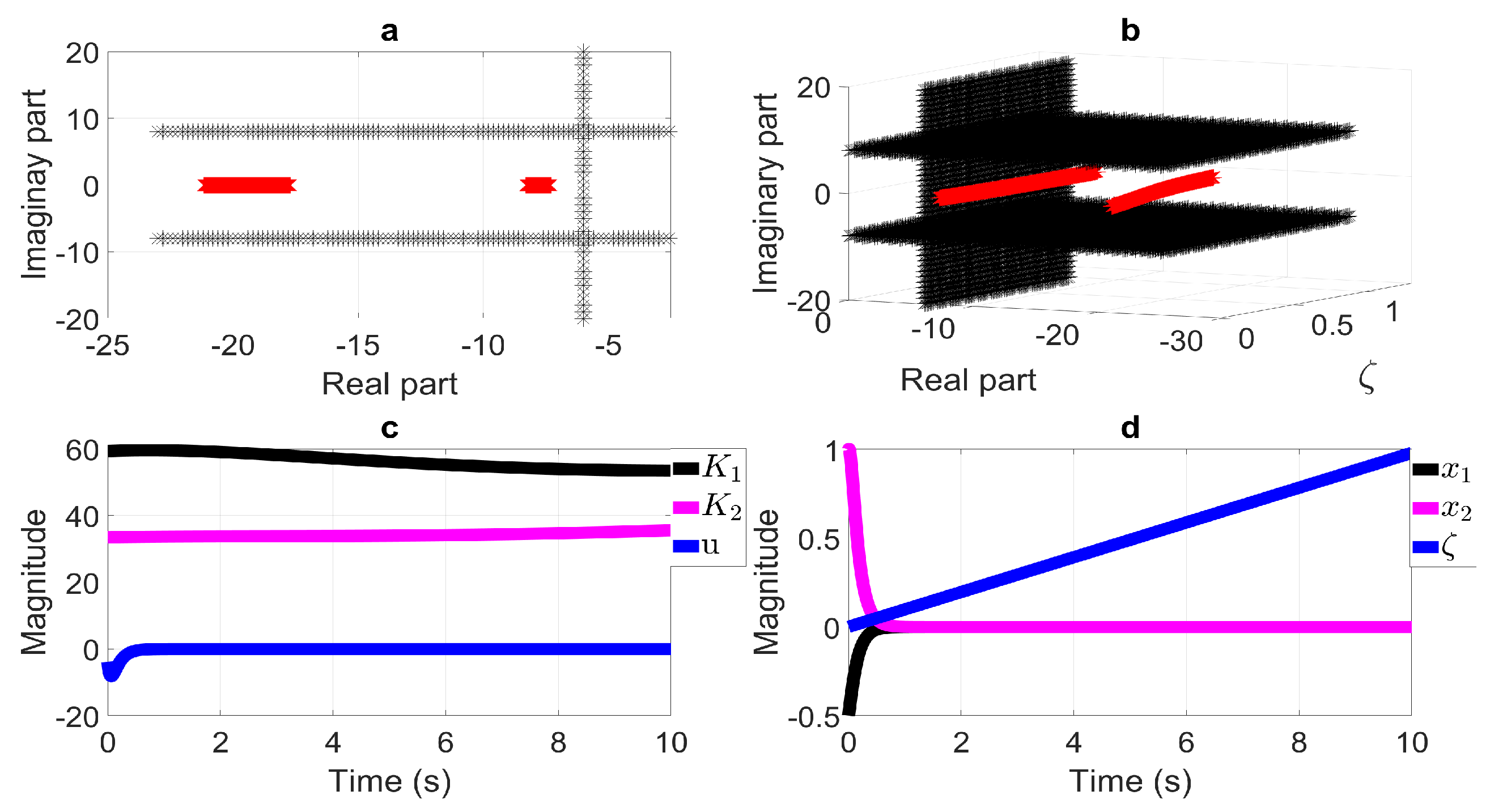
6.4. LMI Region Intersection: Horizontal Half-Strip and Half-Plane LMI Region
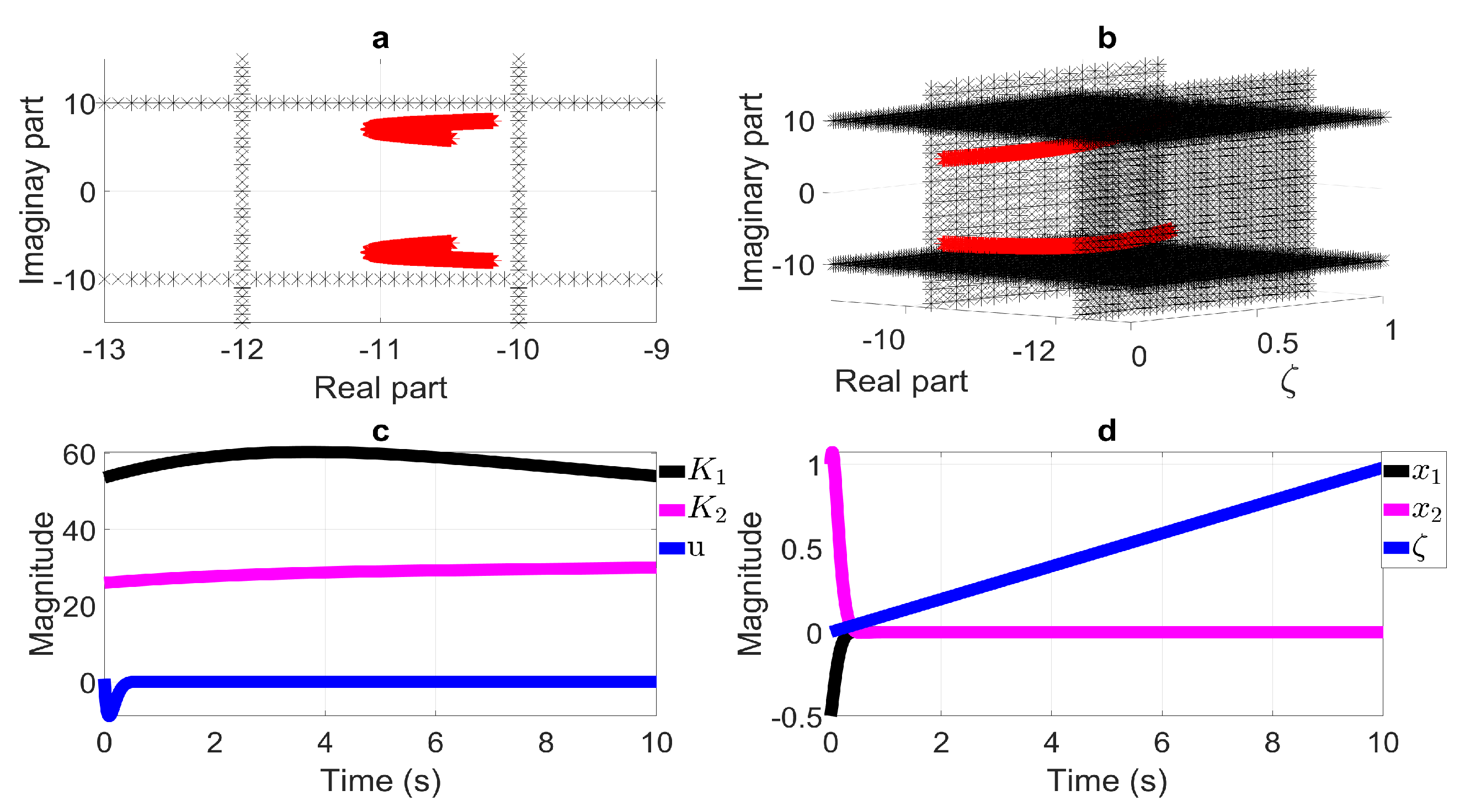
6.5. LMI Region Intersection: Horizontal Half-Strip and Vertical Bands LMI Region
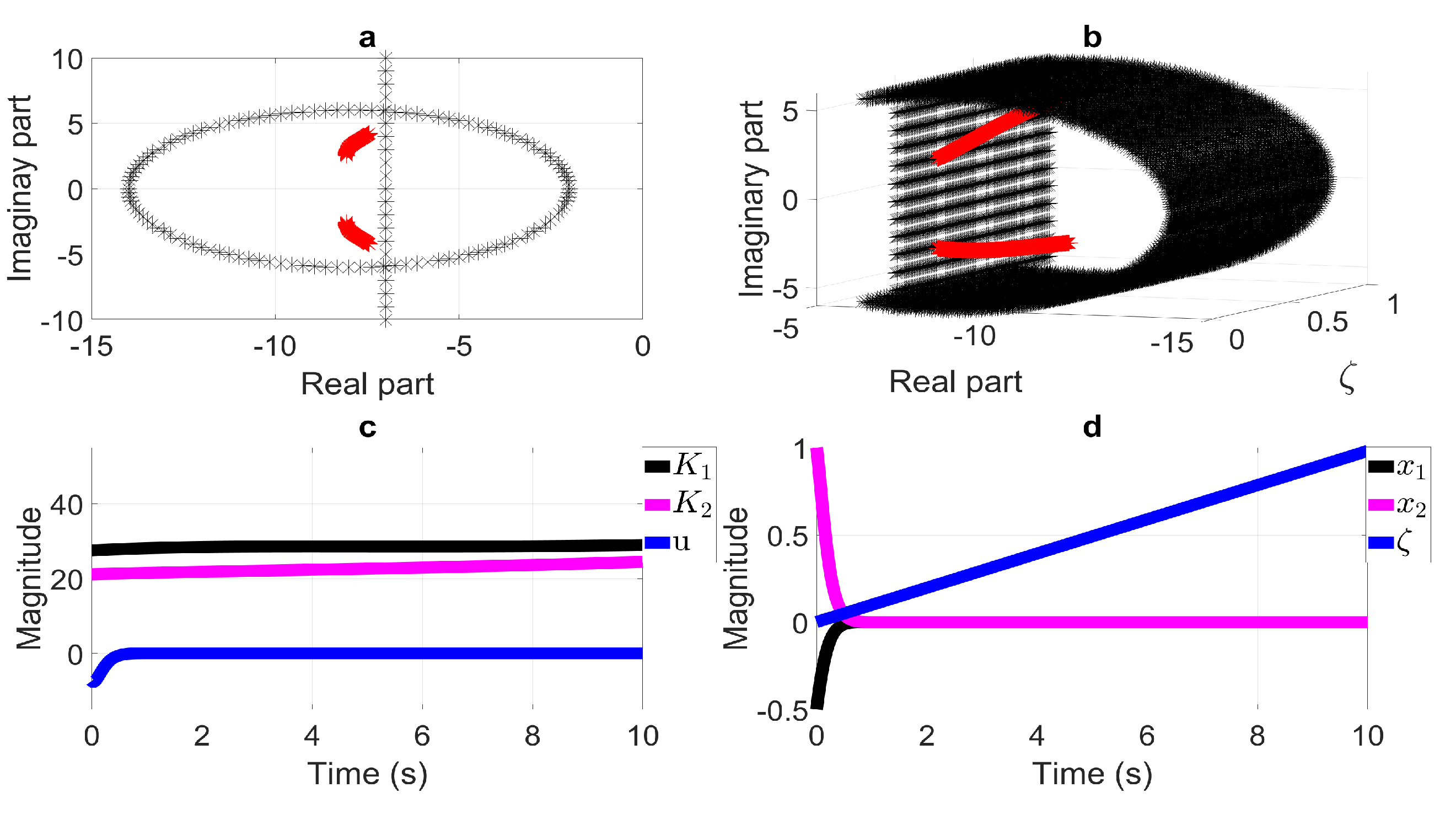
6.6. LMI Region Intersection: Disk LMI Region and Half-Plane LMI Region
7. Remarks
- On higher-order time-varying dependency with respect to the considered application example.It is important to explain the application of the procedure presented throughout this paper in the case of having higher time-varying parameter dependency with respect to that presented in Section 6, i.e., in the case of in Equation (2). If that is the case, with in Equation (2) as an example, notice that the system matrix will be:giving rise to, for the controller design, and with the same order. As a consequence, a closed-loop system with a generalized form can be defined as:resulting in a higher time-varying dependency in the PLMI: a summary of nine elements. This particular case implies the need to apply the DC convexification method presented in Section 5.2 twice, from the resulting PLMI described in Equation (19), and, finally, both LMIs should be solved simultaneously from Proposition 1. In general terms, the DC convexification method allows us to perform a PLMI relaxation, aiming at its computation by applying a set of defined lemmas [31]. As a result, a generalized procedure from that presented throughout this paper can be defined from the system dependency on the time-varying parameter, after having a closed-loop system with a continuous control gain and the desired LMI region. From this, depending on the PLMI’s structure, the corresponding lemma will be needed within the proposed procedure, aiming at performing the PLMI relaxation and, as a result, the state-feedback control gain computation.
- In the case of having time-varying parameter dependency on matrix B.Additionally to that previously presented, let us focus on the case of having time-varying parameter dependency on the B matrix from that considered within this paper, with generalized form:The issue is related to this implication within the previously shown procedure. In addressing this case, notice the Lyapunov stability theory’s application to PLPV systems:considering Equations (16) and (50) will lie in:which in turn can be generalized as:with:From Equation (53), one can perceive similar conditions as those presented in the controller design section (Section 5.1), i.e., as those from which the PLMI relaxation procedure begins (see Section 5.2). As a result, the B matrix with time-varying dependence through does not affect the development presented throughout this paper in terms of LMI regions.
- On the LMI region’s definition and its application to PLPV systems.To explain the use of LMI regions in PLPV systems from the procedure shown throughout this paper, let us point out that there are some LMI regions excluded by means of the presented method. The previous is important due to the fact that some LMI regions characterized by a function of complex plane which excludes the substitution of the first term on its representation should not be considered (conic LMI regions, for instance). For this, let us focus on Equation (14) in Section 4, defining a stable matrix if , with (see Section 3.1). To ensure the closed-loop eigenvalues lie in a specific subset of the complex plane defined by through a state-feedback controller, LMI regions should contain the first term related to substitution , and , i.e., as an example, defines a half-plane LMI region. The reason for this comes from the fact that the mentioned substitution ensures a closed-loop system by considering the main characteristic of a PLVP system, the rate of the time-varying parameter () as a tuning controller parameter.
- In the case of having the system affected by model uncertainties.An important issue related to applying the controller design method presented in this paper is the case of the system being affected by modeling uncertainties. Notice that such considerations would require additional elements in the structure of the control system to face these particularities at the design level. Let us point out that, if this is the case, additional analyses must be carried out to generate variations of the proposed method, thereby achieving a control system with continuous control gain that considers the time-varying parameter rate as a tuning parameter and LMI regions within the design.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shamma, J.S. An Overview of LPV Systems. In Control of Linear Parameter Varying Systems with Applications, 1st ed.; Springer: Boston, MA, USA, 2012. [Google Scholar]
- López-Estrada, F.R.; Rotondo, D.; Valencia-Palomo, G. A Review of Convex Approaches for Control, Observation and Safety of Linear Parameter Varying and Takagi-Sugeno Systems. Process 2019, 7, 814. [Google Scholar] [CrossRef]
- Tóth, R. Modeling and Identification of Linear Parameter-Varying Systems, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- McCloy, R.; Li, Y.; Bao, J.; Skyllas-Kazacos, M. Electrolyte flow rate control for vanadium redox flow batteries using the linear parameter varying framework. J. Process Control 2022, 115, 36–47. [Google Scholar] [CrossRef]
- Fuentes, R.M.; Palma, J.M.; Júnior, H.G.; Lacerda, M.J.; Carvalho, L.d.P.; Rojas, A.J.; Oliveira, R.C.L.F. Gain-Scheduled Control Design Applied to Classical dc-dc Converters in Photovoltaic Systems and Constant Power Loads. Mathematics 2022, 10, 3467. [Google Scholar] [CrossRef]
- Chen, F.; Qiu, X.; Alattas, K.A.; Mohammadzadeh, A.; Ghaderpour, E. A New Fuzzy Robust Control for Linear Parameter-Varying Systems. Mathematics 2022, 10, 3319. [Google Scholar] [CrossRef]
- Hamdi, H.; Rodrigues, M.; Mechmeche, C.; Theilliol, D.; Braiek, N.B. Fault detection and isolation in linear parameter-varying descriptor systems via proportional integral observer. Int. J. Adapt. Control Signal Process. 2012, 26, 224–240. [Google Scholar] [CrossRef]
- López-Estrada, F.R.; Ponsart, J.C.; Astorga-Zaragoza, C.M.; Camas-Anzueto, J.L.; Theilliol, D. Robust sensor fault estimation for descriptor-LPV systems with unmeasurable gain scheduling functions: Application to an anaerobic bioreactor. Int. J. Appl. Math. Comput. Sci. 2015, 25, 233–244. [Google Scholar] [CrossRef]
- Osorio-Gordillo, G.L.; Darouach, M.; Boutat-Baddas, L.; Astorga-Zaragoza, C.M. H∞ dynamical observer-based control for descriptor systems. IMA J. Math. Control Inf. 2018, 35, 707–734. [Google Scholar] [CrossRef]
- Rodrigues, M.; Sahnoun, M.; Theilliol, D.; Ponsart, J.C. Sensor fault detection and isolation filter for polytopic LPV systems: A winding machine application. J. Process Control 2013, 23, 805–816. [Google Scholar] [CrossRef]
- Rotondo, D.; Nejjari, F.; Puig, V. A virtual actuator and sensor approach for fault tolerant control of LPV systems. J. Process Control 2014, 24, 203–222. [Google Scholar] [CrossRef]
- Yang, R.; Rotondo, D.; Puig, V. LMI-based design of state-feedback controllers for pole clustering of LPV systems in a union of DR-regions. Int. J. Syst. Sci. 2022, 53, 291–312. [Google Scholar] [CrossRef]
- Akbari, M.S.; Asemani, M.H.; Vafamand, N.; Mobayen, S.; Fekih, A. Observer-Based Predictive Control of Nonlinear Clutchless Automated Manual Transmission for Pure Electric Vehicles: An LPV Approach. IEEE Access 2021, 9, 20469–20480. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, Z.; Liu, F.; Chen, X. LPV-Based Self-Adaption Integral Sliding Mode Controller With L2 Gain Performance for a Morphing Aircraft. IEEE Access 2019, 7, 81515–81531. [Google Scholar] [CrossRef]
- Dittmer, A.; Sharan, B.; Werner, H. A Velocity quasiLPV-MPC Algorithm for Wind Turbine Control. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June 2021–2 July 2021; pp. 1550–1555. [Google Scholar] [CrossRef]
- Romano, R.A.; Lima, M.M.L.; dos Santos, P.L.; Perdicoúlis, T.P.A. Identification of a quasi-LPV model for wing-flutter analysis using machine-learning techniques. In Data-Driven Modeling, Filtering and Control: Methods and applications, 1st ed.; Institution of Engineering and Technology: London, UK, 2019. [Google Scholar]
- Bokor, J.; Balas, G. Linear Parameter Varying Systems: A Geometric Approach. IFAC Proc. Vol. 2005, 38, 12–22. [Google Scholar] [CrossRef]
- Gilbert, W.; Didier, D.H.; Bernussou, J.; Boyer, D. Polynomial LPV synthesis applied to turbofan engines. Control Eng. Pract. 2010, 18, 1077–1083. [Google Scholar] [CrossRef]
- Wu, F.; Prajna, S. A new solution approach to polynomial LPV system analysis and synthesis. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June 2004–2 July 2004; Volume 2, pp. 1362–1367. [Google Scholar] [CrossRef]
- Brizuela-Mendoza, J.A.; Astorga-Zaragoza, C.M.; Zavala-Río, A.; Pattalochi, L.; Canales-Abarca, F. State and actuator fault estimation observer design integrated in a riderless bicycle stabilization system. ISA Trans. 2016, 61, 199–210. [Google Scholar] [CrossRef]
- Brizuela-Mendoza, J.A.; Sorcia-Vázquez, F.D.; Guzmán-Valdivia, C.H.; Osorio-Sánchez, R.; Martínez-García, M. Observer design for sensor and actuator fault estimation applied to polynomial LPV systems: A riderless bicycle study case. Int. J. Syst. Sci. 2018, 49, 2996–3006. [Google Scholar] [CrossRef]
- Cerone, V.; Andreo, D.; Larsson, M.; Regruto, D. Stabilization of a Riderless Bicycle [Applications of Control]. IEEE Control Syst. Mag. 2010, 30, 23–32. [Google Scholar] [CrossRef]
- Tang, Y.; Li, Y.; Yang, W.; Zhou, W.; Huang, J.; Cui, T. Multi-Input Multi-Output Robust Control of Turbofan Engines Based on Off-Equilibrium Linearization Linear Parameter Varying Model. J. Eng. Gas Turbines Power 2023, 145, 111006. [Google Scholar] [CrossRef]
- Boudaoud, M.; Le Gorrec, Y.; Haddab, Y.; Lutz, P. Gain scheduled control strategies for a nonlinear electrostatic microgripper: Design and real time implementation. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3127–3132. [Google Scholar] [CrossRef]
- Sadeghzadeh, A.; Tóth, R. Improved Embedding of Nonlinear Systems in Linear Parameter-Varying Models With Polynomial Dependence. IEEE Trans. Control Syst. Technol. 2023, 31, 70–82. [Google Scholar] [CrossRef]
- Ebenbauer, C.; Raff, T.; Allgower, F. A duality-based LPV approach to polynomial state feedback design. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 1, pp. 703–708. [Google Scholar] [CrossRef]
- Halalchi, H.; Laroche, E.; Bara, G.I. A polynomial LPV approach for flexible robot end-effector position controller analysis. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 3764–3769. [Google Scholar] [CrossRef]
- Li, S.; Nguyen, A.-T.; Guerra, T.-M.; Kruszewski, A. Reduced-order model based dynamic tracking for soft manipulators: Data-driven LPV modeling, control design and experimental results. Control Eng. Pract. 2023, 138, 105618. [Google Scholar] [CrossRef]
- Huang, Y.; Huang, P. An improved bounded real lemma for H∞ robust heading control of unmanned surface vehicle. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2023, 237, 1812–1821. [Google Scholar] [CrossRef]
- Apkarian, P.; Tuan, H.D. Parameterized LMIs in control theory. SIAM J. Control Optim. 2000, 38, 1241–1264. [Google Scholar] [CrossRef]
- Tuan, H.D.; Apkarian, P. Relaxations of parameterized lmis with control applications. Int. J. Robust Nonlinear Control 1999, 9, 59–84. [Google Scholar] [CrossRef]
- Cvetkovski, Z. Sum of Squares (SOS Method). In Inequalities: Theorems, Techniques and Selected Problems, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Rugh, W.J.; Shamma, J.S. Research on gain scheduling. Automatica 2000, 36, 1401–1425. [Google Scholar] [CrossRef]
- Agulhari, C.M.; Felipe, A.; Oliveira, R.C.L.F.; Peres, P.L.D. Algorithm 998: The Robust LMI Parser—A toolbox to construct LMI conditions for uncertain systems. ACM Trans. Math. Softw. 2019, 45, 36:1–36:25. [Google Scholar] [CrossRef]
- Chilali, M.; Gahinet, P.; Apkarian, P. Robust pole placement in LMI regions. IEEE Trans. Autom. Control 1999, 44, 2257–2270. [Google Scholar] [CrossRef]
- Chilali, M.; Gahinet, P. H∞ design with pole placement constraints: An LMI approach. IEEE Trans. Autom. Control 1996, 41, 358–367. [Google Scholar] [CrossRef]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]
- Sturm, J.F. Using SeDuMi 1.02, A Matlab toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | Generalized variable for time. |
| Time-varying parameters. | |
| System state and input and output system vectors, respectively. | |
| , , | Time-varying-dependent system matrices. |
| Indexing variables. | |
| Generalization for time-varying parameter-dependent matrix. | |
| Control gain. | |
| Time-varying parameter-dependent Lyapunov function. | |
| Time-varying parameter-dependent matrices for stability purposes. | |
| Parameterized linear matrix inequalities (PLMIs) coefficients. | |
| w | Decision variable in PLMIs. |
| Complex number generalized set. | |
| D | Complex plane subset. |
| z | Complex number. |
| Characteristic function of D. | |
| D-stable matrix. | |
| Compatible-dimensions constant matrices. | |
| Compatible-dimensions constant matrices. | |
| Matrix factoring closed-loop coefficients. | |
| Relaxed PLMI decision variables. | |
| Jacobian and Hessian matrices, respectively. | |
| LMI regions-defining parameters. | |
| Matrix coefficients of factoring disk LMI region. | |
| Matrix coefficients involved in vertical bands LMI region. | |
| Matrix coefficients of factoring horizontal half-strip LMI region. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brizuela-Mendoza, J.A.; Mixteco-Sánchez, J.C.; López-Osorio, M.A.; Ortiz-Torres, G.; Sorcia-Vázquez, F.D.J.; Lozoya-Ponce, R.E.; Ramos-Martínez, M.B.; Pérez-Vidal, A.F.; Morales, J.Y.R.; Guzmán-Valdivia, C.H.; et al. On the State-Feedback Controller Design for Polynomial Linear Parameter-Varying Systems with Pole Placement within Linear Matrix Inequality Regions. Mathematics 2023, 11, 4696. https://doi.org/10.3390/math11224696
Brizuela-Mendoza JA, Mixteco-Sánchez JC, López-Osorio MA, Ortiz-Torres G, Sorcia-Vázquez FDJ, Lozoya-Ponce RE, Ramos-Martínez MB, Pérez-Vidal AF, Morales JYR, Guzmán-Valdivia CH, et al. On the State-Feedback Controller Design for Polynomial Linear Parameter-Varying Systems with Pole Placement within Linear Matrix Inequality Regions. Mathematics. 2023; 11(22):4696. https://doi.org/10.3390/math11224696
Chicago/Turabian StyleBrizuela-Mendoza, Jorge A., Juan Carlos Mixteco-Sánchez, Maria A. López-Osorio, Gerardo Ortiz-Torres, Felipe D. J. Sorcia-Vázquez, Ricardo Eliú Lozoya-Ponce, Moises B. Ramos-Martínez, Alan F. Pérez-Vidal, Jesse Y. Rumbo Morales, Cesar H. Guzmán-Valdivia, and et al. 2023. "On the State-Feedback Controller Design for Polynomial Linear Parameter-Varying Systems with Pole Placement within Linear Matrix Inequality Regions" Mathematics 11, no. 22: 4696. https://doi.org/10.3390/math11224696
APA StyleBrizuela-Mendoza, J. A., Mixteco-Sánchez, J. C., López-Osorio, M. A., Ortiz-Torres, G., Sorcia-Vázquez, F. D. J., Lozoya-Ponce, R. E., Ramos-Martínez, M. B., Pérez-Vidal, A. F., Morales, J. Y. R., Guzmán-Valdivia, C. H., Mena-Enriquez, M. G., & Torres-Cantero, C. A. (2023). On the State-Feedback Controller Design for Polynomial Linear Parameter-Varying Systems with Pole Placement within Linear Matrix Inequality Regions. Mathematics, 11(22), 4696. https://doi.org/10.3390/math11224696