
Analysis of Fluctuating Antenna Beamwidth in UAV-Assisted Cellular Networks


Abstract
:1. Introduction
1.1. Poisson Point Processes and Their Applications
1.1.1. Applications of PPP in Device-to-Device Communications
1.1.2. Applications of PPP in Vehicular Communications
1.1.3. Applications of PPP in Cellular Communications
1.2. Motivation and Challenge
2. Related Works
- In the works conducted by [25,26,27,28] in 2022, the authors considered a fluctuating 3D beamwidth and meticulously modeled their UAV antenna’s orientation. Their research focused on the analysis of the fluctuating 3D beamwidth in aerial networks and investigated network performance by evaluating complex multiple integrals. Their research revealed that beamwidth fluctuations introduced inaccuracies in the UAV antenna alignment for aerial networks. However, this paper encompasses the analysis of fluctuations of the antenna 3D beamwidth for a UAV-assisted cellular network, which is un-explored previously, as it involves the complexity of addressing fluctuating beamwidth and involves intricate integrals, which restricted other researchers from performing this analysis. Thus, the contribution of this paper diverges from the above-mentioned studies in significant ways. Here, we derive the association probability, coverage probability, and SE for a T-UE connected to MBS, LOS LAP, and NLOS LAP in the presence of fluctuating 3D beamwidth by solving complex multiple integrals.
- In the study presented in [48], the focus was on modeling a U-V2X network utilizing square array antennas while taking into account fluctuations in the 3D beamwidth. However, in the context of this paper, our investigation centers on a UAV-assisted cellular network.
- In the research presented in [18], the authors constructed a model for a UAV-assisted network utilizing conical directional antennas. They assessed the outage performance of a T-UE in this context but did not account for UAV fluctuating beamwidths. In contrast, this paper adopts a different approach. We model a UAV-assisted cellular network by employing square array antennas while considering fluctuating beamwidths. Furthermore, our analysis include assessments of the association probability, coverage probability, and SE.
- An extensive architecture of a cellular network assisted by a platform of UAVs is investigated in the presence of a fluctuating beamwidth in terms of association probability, coverage probability, and SE.
- The analytical expressions of association probability and coverage probability considering a fluctuating beamwidth for a T-UE linked with MBS, LOS LAP, and NLOS LAP are derived.
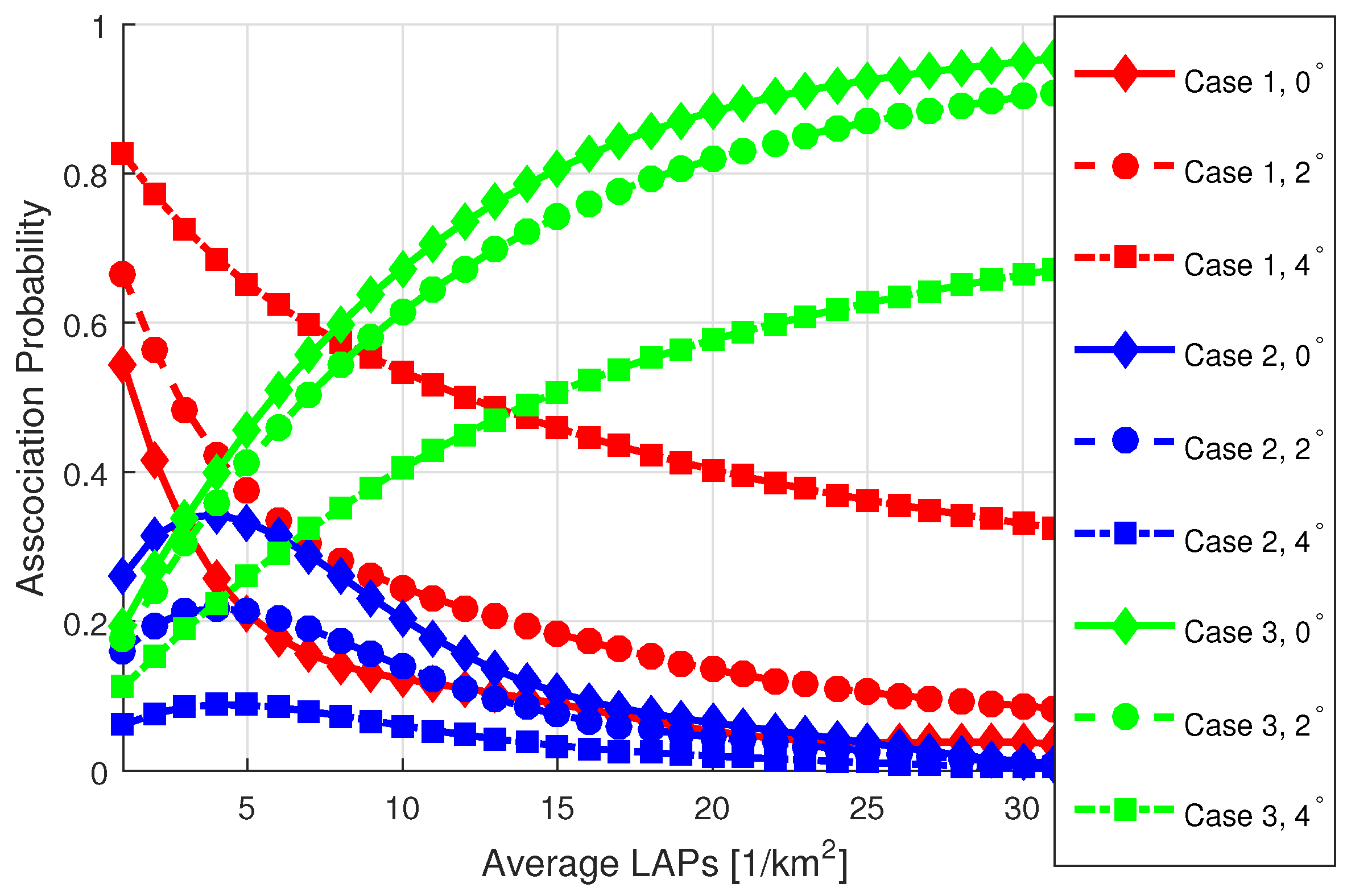
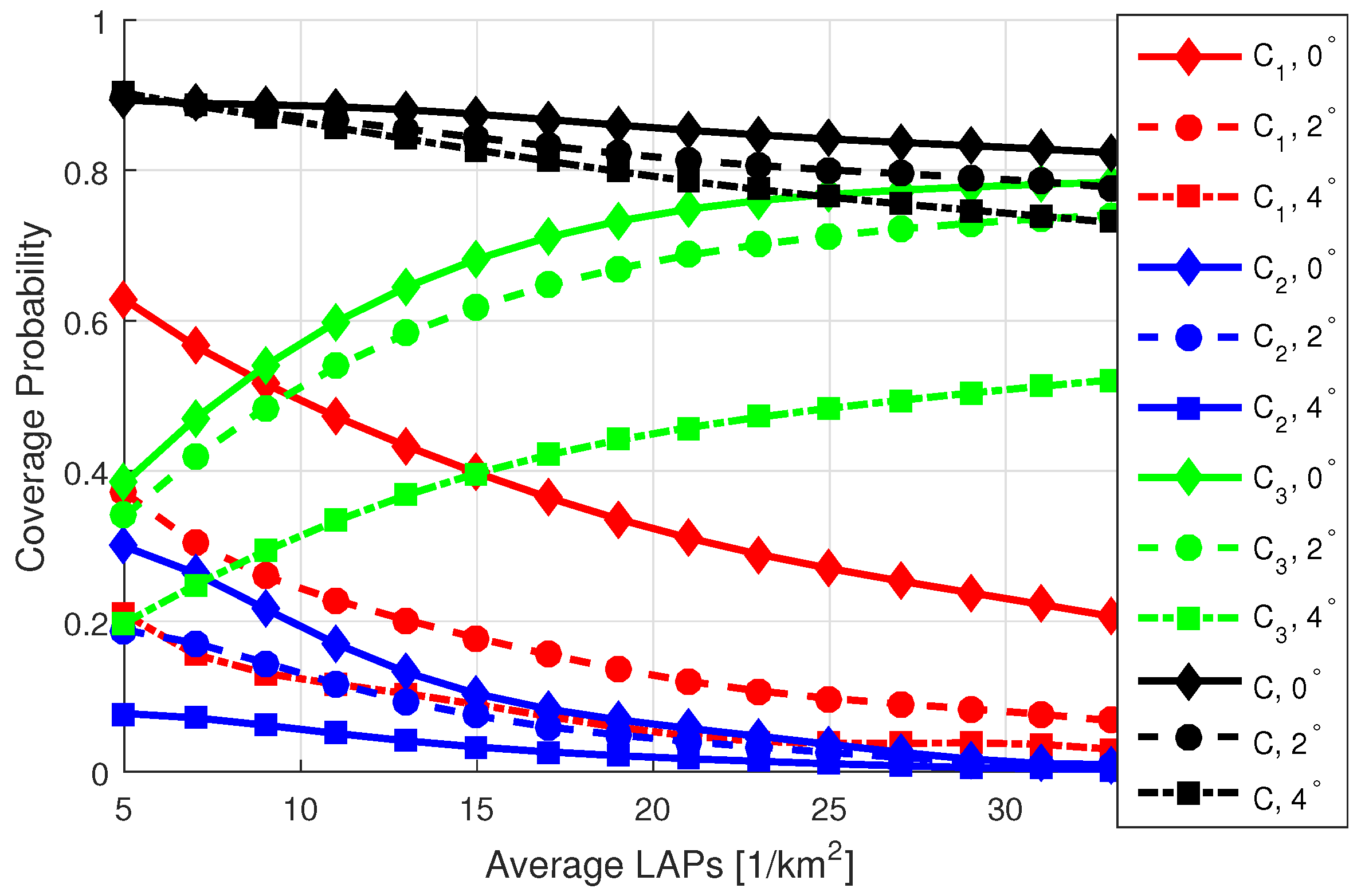
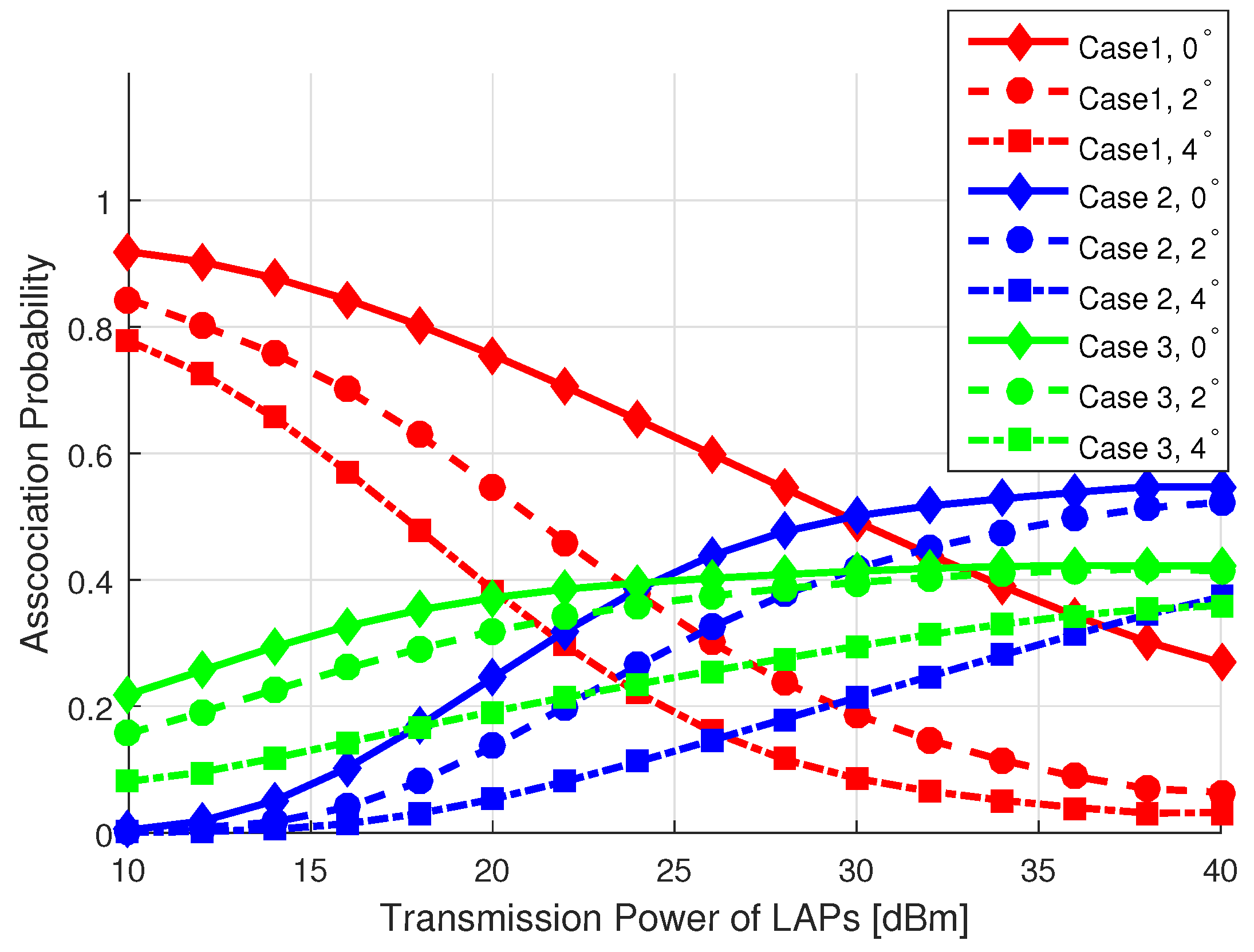
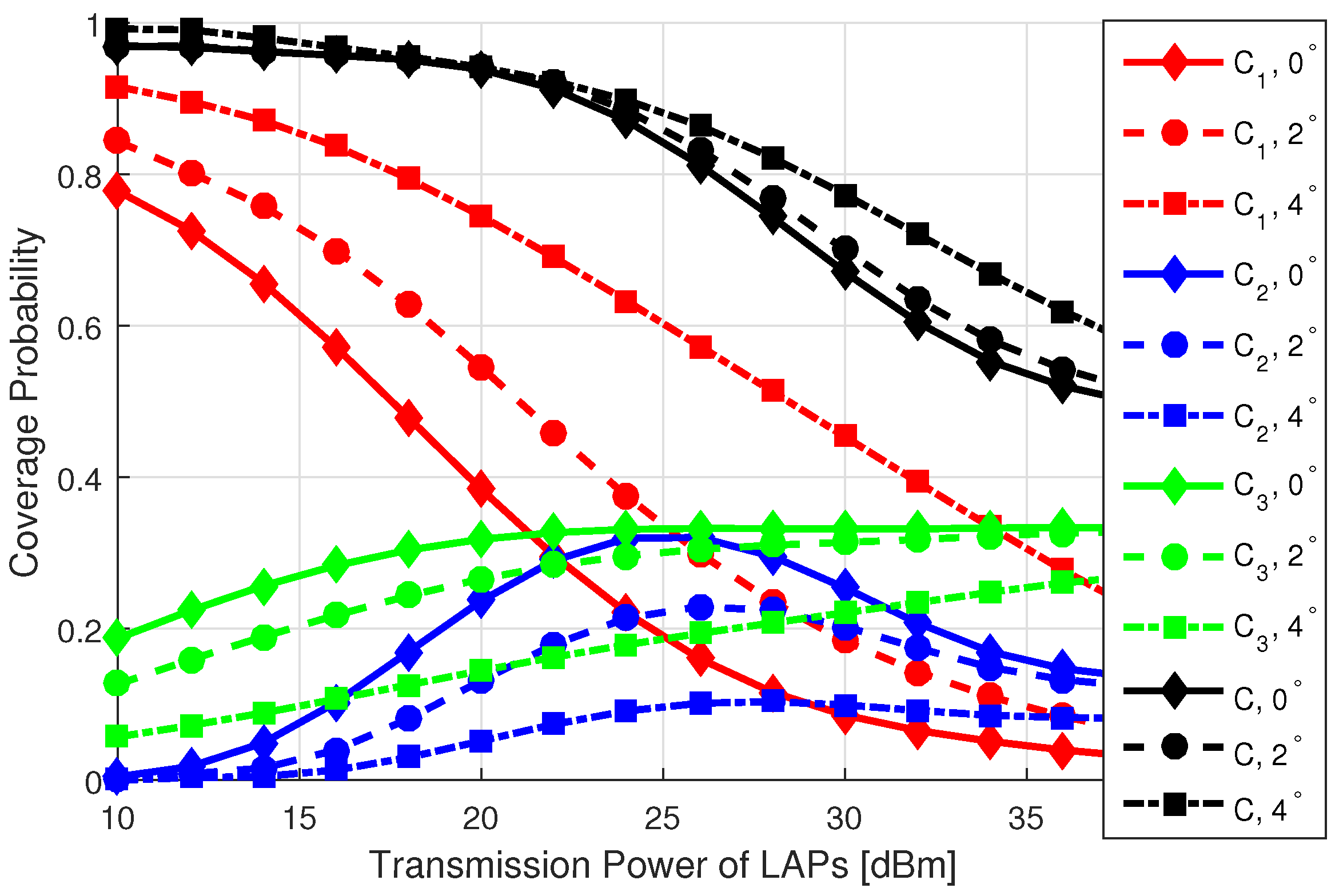
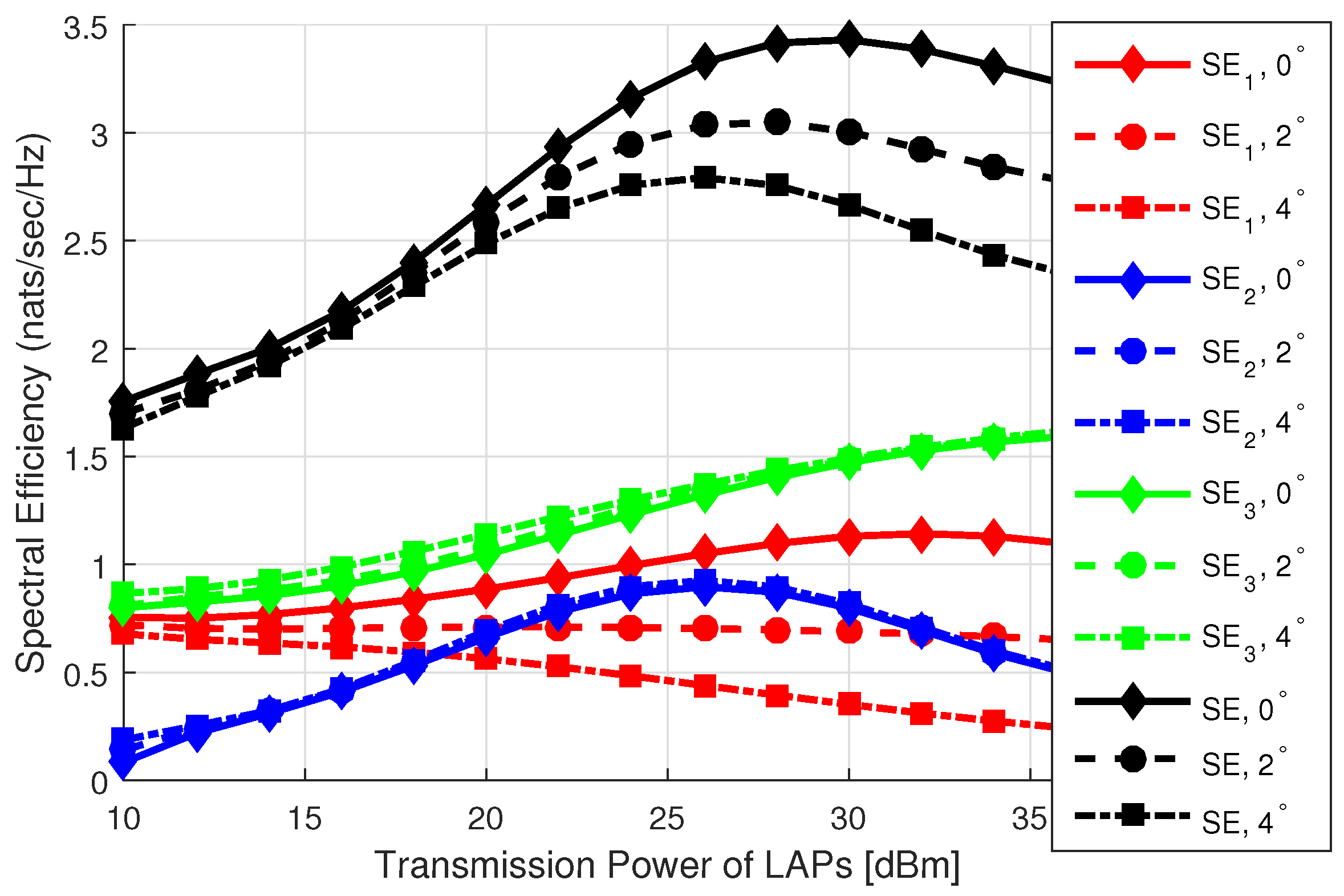
- The coverage and SE performance of a T-UE linked with MBS, LOS LAP, and NLOS LAP is analyzed for various network settings, such as LAP density, LAP transmission power, and SIR threshold.
- The findings from our analysis demonstrate a substantial degradation in the performance of thr T-UE within a UAV-assisted cellular network as fluctuations in the 3D antenna beamwidth increase. Furthermore, this adverse impact is exacerbated in scenarios characterized by higher densities of LOS LAPs and increased transmission power levels.
3. System Model
3.1. Network Deployment
3.2. Antenna Gain
3.3. Received Signal Power
3.4. Downlink SIR
4. Probability Density Function
5. Association Probability Analysis
5.1. Case 1
5.2. Case 2
5.3. Case 3
6. Interference Analysis
6.1. Interference of MBSs
6.2. Interference of LOS LAPs
6.3. Interference of NLOS LAPs
7. Performance Analysis
7.1. Coverage Probability Analysis
7.2. Spectral Efficiency Analysis
8. Results and Discussion
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of (13)
Appendix B. Derivation of (18)
Appendix C. Derivation of (22)
References
- IMT Traffic Estimates for the Years 2020 to 2030. Report ITU-R M. 2370-0, ITU-R Radiocommunication Sector of ITU. 2015. Available online: https://www.itu.int/dms_pub/itu-r/opb/rep/R-REP-M.2370-2015-PDF-E.pdf (accessed on 1 September 2023).
- Nawaz, S.J.; Sharma, S.K.; Wyne, S.; Patwary, M.N.; Asaduzzaman, M. Quantum Machine Learning for 6G Communication Networks: State-of-the-Art and Vision for the Future. IEEE Access 2019, 7, 46317–46350. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, J. Performance modeling and analysis of base station cooperation for cellular-connected UAV networks. IEEE Trans. Veh. Technol. 2021, 71, 1807–1819. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, J. Performance Analysis of Location-based Base Station Cooperation for Cellular-Connected UAV Networks. IEEE Trans. Veh. Technol. 2023, 72, 14787–14800. [Google Scholar] [CrossRef]
- Liu, C.H.; Syed, M.A.; Wei, L. Toward ubiquitous and flexible coverage of UAV-IRS-assisted NOMA networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1749–1754. [Google Scholar] [CrossRef]
- Wu, H.; Tao, X.; Zhang, N.; Shen, X. Cooperative UAV cluster-assisted terrestrial cellular networks for ubiquitous coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2045–2058. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhou, F.; Feng, L.; Li, W.; Sun, Y.; Imran, M.A. Backhaul-Constrained Coverage Analysis of Integrated High and Low Altitude Platforms Aerial Communication System in Post-Disaster Areas. IEEE Commun. Lett. 2023, 27, 1629–1633. [Google Scholar] [CrossRef]
- Wang, D.; He, Y.; Yu, K.; Srivastava, G.; Nie, L.; Zhang, R. Delay-sensitive secure NOMA transmission for hierarchical HAP–LAP medical-care IoT networks. IEEE Trans. Ind. Informatics 2021, 18, 5561–5572. [Google Scholar] [CrossRef]
- Shafique, T.; Feriani, A.; Tabassum, H.; Hossain, E. Intelligent Reflecting Surfaces (IRS)-Aided Cellular Networks and Deep Learning-Based Design. In Intelligent Reconfigurable Surfaces (IRS) for Prospective 6G Wireless Networks; Wiley: Hoboken, NJ, USA, 2022; pp. 149–170. [Google Scholar] [CrossRef]
- Banagar, M.; Dhillon, H.S. 3D two-hop cellular networks with wireless backhauled UAVs: Modeling and fundamentals. IEEE Trans. Wirel. Commun. 2022, 21, 6417–6433. [Google Scholar] [CrossRef]
- Ferdowsi, A.; Abd-Elmagid, M.A.; Saad, W.; Dhillon, H.S. Neural combinatorial deep reinforcement learning for age-optimal joint trajectory and scheduling design in UAV-assisted networks. IEEE J. Sel. Areas Commun. 2021, 39, 1250–1265. [Google Scholar] [CrossRef]
- Badri, S.; Rasti, M. Interference management and duplex mode selection in in-band full duplex D2D communications: A stochastic geometry approach. IEEE Trans. Mob. Comput. 2020, 20, 2212–2223. [Google Scholar] [CrossRef]
- Boumaalif, A.; Zytoune, O. Power Distribution of Device-to-Device Communications Under Nakagami Fading Channel. IEEE Trans. Mob. Comput. 2020, 21, 2158–2167. [Google Scholar] [CrossRef]
- Arif, M.; Kim, W.; Qureshi, S. Interference Characterization in Cellular-Assisted Vehicular Communications with Jamming. IEEE Access 2022, 10, 42469–42480. [Google Scholar] [CrossRef]
- Traspadini, A.; Giordani, M.; Zorzi, M. UAV/HAP-assisted vehicular edge computing in 6G: Where and what to offload? In Proceedings of the 2022 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Antwerp, Belgium, 3–6 June 2022; pp. 178–183. [Google Scholar] [CrossRef]
- Andrews, J.G.; Baccelli, F.; Ganti, R.K. A tractable approach to coverage and rate in cellular networks. IEEE Trans. Commun. 2011, 59, 3122–3134. [Google Scholar] [CrossRef]
- Shafique, T.; Tabassum, H.; Hossain, E. Stochastic geometry analysis of IRS-assisted downlink cellular networks. IEEE Trans. Commun. 2022, 70, 1442–1456. [Google Scholar] [CrossRef]
- Peng, J.; Tang, W.; Zhang, H. Directional Antennas Modeling and Coverage Analysis of UAV-Assisted Networks. IEEE Wirel. Commun. Lett. 2022, 11, 2175–2179. [Google Scholar] [CrossRef]
- Alkama, D.; Ouamri, M.A.; Alzaidi, M.S.; Shaw, R.N.; Azni, M.; Ghoneim, S.S. Downlink performance analysis in MIMO UAV-cellular communication with LOS/NLOS propagation under 3D beamforming. IEEE Access 2022, 10, 6650–6659. [Google Scholar] [CrossRef]
- Sun, H.; Ma, C.; Zhang, L.; Li, J.; Wang, X.; Li, S.; Quek, T.Q. Coverage Analysis for Cellular-Connected Random 3D Mobile UAVs With Directional Antennas. IEEE Wirel. Commun. Lett. 2023, 12, 550–554. [Google Scholar] [CrossRef]
- Rawat, M.; Giordani, M.; Lall, B.; Chaoub, A.; Zorzi, M. On the Optimal Beamwidth of UAV-Assisted Networks Operating at Millimeter Waves. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Chen, J.; Gong, Y.; Ding, G. Network-connected UAV communications: Potentials and challenges. China Commun. 2018, 15, 111–121. [Google Scholar] [CrossRef]
- Chu, E.; Kim, J.M.; Jung, B.C. Interference analysis of directional UAV networks: A stochastic geometry approach. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 9–12. [Google Scholar] [CrossRef]
- Liu, W.; Lu, Z.; Wang, Z.; Li, X.; Li, Z.; Xiao, W.; Ye, X.; Wang, Z.; Song, J.; Qiao, J.; et al. Sidelobes Suppression for Time Domain Anti-Jamming of Satellite Navigation Receivers. Remote Sens. 2022, 14, 5609. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Hasna, M. Pointing Error Modeling of mmWave to THz High-Directional Antenna Arrays. IEEE Wirel. Commun. Lett. 2022, 11, 2435–2439. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Hasna, M. 3D Uplink Channel Modeling of UAV-based mmWave Fronthaul Links for Future Small Cell Networks. IEEE Trans. Veh. Technol. 2022, 72, 1400–1413. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Rezaee, M.; Yazdanian, V.; Maham, B.; Saad, W.; Hong, C.S. 3D channel characterization and performance analysis of UAV-assisted millimeter wave links. IEEE Trans. Wirel. Commun. 2020, 20, 110–125. [Google Scholar] [CrossRef]
- Badarneh, O.S.; Dabiri, M.T.; Hasna, M. Channel Modeling and Performance Analysis of Directional THz Links Under Pointing Errors and α-μ Distribution. IEEE Commun. Lett. 2023, 27, 812–816. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. On-Demand Deployment of Aerial Base Stations for Coverage Enhancement in Reconfigurable Intelligent Surface-Assisted Cellular Networks on Uneven Terrains. IEEE Commun. Lett. 2022, 27, 666–670. [Google Scholar] [CrossRef]
- Pang, X.; Mei, W.; Zhao, N.; Zhang, R. Intelligent reflecting surface assisted interference mitigation for cellular-connected UAV. IEEE Wirel. Commun. Lett. 2022, 11, 1708–1712. [Google Scholar] [CrossRef]
- Arif, M.; Wyne, S.; Navaie, K.; Haroon, M.S.; Qureshi, S. Dual Connectivity in Decoupled Aerial HetNets With Reverse Frequency Allocation and Clustered Jamming. IEEE Access 2020, 8, 221454–221467. [Google Scholar] [CrossRef]
- Pandey, G.K.; Gurjar, D.S.; Nguyen, H.H.; Yadav, S. Security threats and mitigation techniques in UAV communications: A comprehensive survey. IEEE Access 2022, 10, 112858–112897. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, X. IRS/UAV-Based Edge-Computing/Traffic-Offloading Over RF-Powered 6G Mobile Wireless Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1272–1277. [Google Scholar] [CrossRef]
- Sriharsha, C.; Murthy, C.S.R. A Novel Cellular User Offloading via UAV-Borne IRS. IEEE Wirel. Commun. Lett. 2023, 12, 1736–1740. [Google Scholar] [CrossRef]
- Guan, Z.; Wang, S.; Gao, L.; Xu, W. Energy-Efficient UAV Communication with 3D Trajectory Optimization. In Proceedings of the 2021 7th International Conference on Computer and Communications (ICCC), Chengdu, China, 10–13 December 2021; pp. 312–317. [Google Scholar] [CrossRef]
- Liu, Y.; Huangfu, W.; Zhou, H.; Zhang, H.; Liu, J.; Long, K. Fair and energy-efficient coverage optimization for UAV placement problem in the cellular network. IEEE Trans. Commun. 2022, 70, 4222–4235. [Google Scholar] [CrossRef]
- Huq, K.M.S.; Otung, I.E.; Rodriguez, J. A study of coverage probability-based energy-efficiency analysis for UAV-aided THz-enabled 6G networks. IEEE Trans. Intell. Transp. Syst. 2022, 24, 7404–7411. [Google Scholar] [CrossRef]
- Tung, T.V.; An, T.T.; Lee, B.M. Joint Resource and Trajectory Optimization for Energy Efficiency Maximization in UAV-Based Networks. Mathematics 2022, 10, 3840. [Google Scholar] [CrossRef]
- Arif, M.; Wyne, S.; Navaie, K.; Nawaz, S.J.; Alvi, S.H. Decoupled Downlink and Uplink Access for Aerial Terrestrial Heterogeneous Cellular Networks. IEEE Access 2020, 8, 111172–111185. [Google Scholar] [CrossRef]
- Shi, Y.; Hamdan, M.Q.; Alsusa, E.; Hamdi, K.A.; Baidas, M.W. A decoupled access scheme with reinforcement learning power control for cellular-enabled UAVs. IEEE Internet Things J. 2021, 8, 17261–17274. [Google Scholar] [CrossRef]
- Arif, M.; Wyne, S.; Ahmed, J. Efficiency Analysis of a K-tier Clustered HCN using Dual Connectivity with DUDe Access. AEU Int. J. Electron. Commun. 2020, 123, 153291. [Google Scholar] [CrossRef]
- Arif, M.; Wyne, S.; Navaie, K.; Haroon, M.S.; Qureshi, S. Clustered Jamming in Aerial HetNets With Decoupled Access. IEEE Access 2020, 8, 142218–142228. [Google Scholar] [CrossRef]
- Qasim, M.; Haroon, M.S.; Imran, M.; Muhammad, F.; Kim, S. 5G cellular networks: Coverage analysis in the presence of inter-cell interference and intentional jammers. Electronics 2020, 9, 1538. [Google Scholar] [CrossRef]
- Haroon, M.S.; Chae, S.H.; Jeon, S.W. Outage analysis for multi-radio heterogeneous networks in the presence of aerial jammers. ICT Express 2023. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Safi, H.; Parsaeefard, S.; Saad, W. Analytical channel models for millimeter wave UAV networks under hovering fluctuations. IEEE Trans. Wirel. Commun. 2020, 19, 2868–2883. [Google Scholar] [CrossRef]
- Althunibat, S.; Dabiri, M.T.; Hasna, M.O.; Qaraqe, K. Secrecy analysis of directional mmWave UAV-based links under hovering fluctuations. IEEE Open J. Commun. Soc. 2023, 1–9. [Google Scholar] [CrossRef]
- Arif, M.; Kim, W. Analysis of U-V2X Communications with Non-Clustered and Clustered Jamming in the Presence of Fluctuating UAV Beam Width. Mathematics 2023, 11, 3434. [Google Scholar] [CrossRef]
- Arif, M.; Hasna, M.O. Analysis of fluctuations of antenna pattern in U-V2X communications. Phys. Commun. 2023, 58, 102066. [Google Scholar] [CrossRef]
- Chiu, S.N.; Stoyan, D.; Kendall, W.S.; Mecke, J. Stochastic Geometry and Its Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar] [CrossRef]
- 3GPP TR 38.901 V14.1.1. Study on channel model for frequencies from 0.5 to 100 GHz (Release 17). Technical Specification Group Radio Access Network. 2017. Available online: https://standards.iteh.ai/catalog/standards/etsi/64afdacf-0cab-4049-8c5e-e2fce650b30d/etsi-tr-138-901-v14.1.1-2017-08 (accessed on 1 September 2023).
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Andrews, J.G.; Gupta, A.K.; Dhillon, H.S. A primer on cellular network analysis using stochastic geometry. arXiv 2016, arXiv:1604.03183. [Google Scholar] [CrossRef]
- Alzenad, M.; Yanikomeroglu, H. Coverage and rate analysis for unmanned aerial vehicle base stations with LoS/NLoS propagation. In Proceedings of the IEEE Globecom Workshops (IGCW), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| 3D PPP of LAPs | L | Set of LAPs | |
| 2D PPP of MBSs | M | Set of MBSs | |
| n | Total number of MBSs | l | Total number of LAPs |
| Density of LAPs | LAPs’ transmission power | ||
| Density of MBSs | MBSs’ transmission power | ||
| Path loss of MBSs | K | Additional path loss of MBSs | |
| Path loss of LOS LAPs | Additional path loss of LOS LAPs | ||
| Path loss of NLOS LAPs | Additional path loss of NLOS LAPs | ||
| MBSs’ channel gain | Height of LAP | ||
| LOS LAPs’ channel gain | NLOS LAPs’ channel gain | ||
| LOS LAPs’ Nakagami fading parameter | NLOS LAPs’ Nakagami fading parameter | ||
| Number of transmitting antennas | Number of receiving antennas | ||
| Elevation angle | Azimuth angle | ||
| Wave number for x-axis | Wave number for y-axis | ||
| Carrier frequency | c | Speed of light | |
| Antenna front-to-back ratio | Antenna side-lobes limit | ||
| Horizontal 3D beamwidth | Vertical 3D beamwidth | ||
| Gain of transmitter | Gain of receiver | ||
| r | 2D Euclidean distance between LAP and UE | z | 3D Euclidean distance between LAP and UE |
| q | LOS or NLOS UAV | Q | Transmitting or receiving node |
| LOS probability | NLOS probability | ||
| System bandwidth | B | Bias factor | |
| SIR pre-set threshold | M | MBS | |
| L | LOS LAP | N | NLOS LAP |
| Standard deviation of beamwidth |
| Reference, Year | Network Model | Outcomes | Constraints |
|---|---|---|---|
| [43], 2020 | Impact of jamming signals of clustered grounddevices in cellular networks consisting of macro and small base stations is considered | Investigation of coverage performance | Model does not consider a UAV-assisted wireless network |
| [44], 2023 | Impact of jamming signals of aerial devices in cellular networks consisting of macro and small base stations is considered | Investigation of outage performance | Impact of fluctuating beamwidth on UAV-assisted wireless networks is not considered |
| [25,26,45], 2022 | The impact of the 3D beamwidth of fluctuating antenna for an aerial network is considered | Investigation of coverage performance | Impact of a fluctuating beamwidth on UAV-assisted cellular networks is not considered |
| [46], 2023 | Impact of 3D beamwidth fluctuations of mm waves including an eavesdropper in an aerial network model is considered | Investigation of secrecy capacity | Impact of fluctuating beamwidths on the UAV-assisted cellular network is not considered |
| [18], 2022 | Impact of 3D antenna beam forming in a UAV-assisted wireless network is considered | Investigation of coverage performance | Impact of a fluctuating beamwidth on the UAV-assisted cellular network is not considered |
| [47], 2023 | Impact of 3D beamwidth fluctuations for U-V2X communications is considered | Investigation of coverage and spectrum efficiency performance | Impact of a fluctuating beamwidth on the UAV-assisted cellular network is not considered |
| This work | Impact of 3D beamwidth fluctuations on UAV-assisted cellular networks is considered | Investigation of coverage and spectrum efficiency performance | — |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 20/km | 2.25 | ||
| 4/km | 2 | ||
| −20 dB | 4 | ||
| 20 m | 20 | ||
| a | 12.08 | 20 | |
| b | 0.21 | B | 0.001 |
| 40 dBm | 3 GHz | ||
| 23 dBm | , | 1 | |
| 1 dB | 10 dB | ||
| K | 1 dB | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arif, M.; Kim, W. Analysis of Fluctuating Antenna Beamwidth in UAV-Assisted Cellular Networks. Mathematics 2023, 11, 4706. https://doi.org/10.3390/math11224706
Arif M, Kim W. Analysis of Fluctuating Antenna Beamwidth in UAV-Assisted Cellular Networks. Mathematics. 2023; 11(22):4706. https://doi.org/10.3390/math11224706
Chicago/Turabian StyleArif, Mohammad, and Wooseong Kim. 2023. "Analysis of Fluctuating Antenna Beamwidth in UAV-Assisted Cellular Networks" Mathematics 11, no. 22: 4706. https://doi.org/10.3390/math11224706
APA StyleArif, M., & Kim, W. (2023). Analysis of Fluctuating Antenna Beamwidth in UAV-Assisted Cellular Networks. Mathematics, 11(22), 4706. https://doi.org/10.3390/math11224706