

Bipartite Consensus Problems for Directed Signed Networks with External Disturbances

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We introduced an output variable for signed networks. This leads to the consensus issues being converted into the corresponding output stability issues. We focused on the stability instead of consensus, which provide a convenient approach to deal with consensus problems of signed networks. To be specific, for structurally balanced cases, we applied the nonsingular transformation to signed networks, in which a reduced-order system was developed and its output stability reflected the bipartite consensus of signed networks.
- Using the tools of robust control, we derived the necessary and sufficient conditions to ensure the bipartite consensus (or state stability) objective of directed signed networks under structurally balanced (or unbalanced) conditions. Moreover, the desired disturbance rejection performance was also satisfied.
- When the signed network was structurally balanced, we provided the mathematical expression for the terminal states of all agents. It is worth noting that the terminal states had a relationship with the external disturbances. When considering the structurally unbalanced signed network, the external disturbance had no effect on the terminal values of agents.
2. Preliminaries
- (R1)
- L has a zero eigenvalue and eigenvalues , , ⋯, with positive real parts if and only if is structurally balanced.
- (R2)
- All eigenvalues , , ⋯, have positive real parts if and only if is structurally unbalanced.
3. Problem Description
- (1)
- (2)
- (C1)
- is absolutely convergent;
- (C2)
- there exists a constant vector such that
- (1)
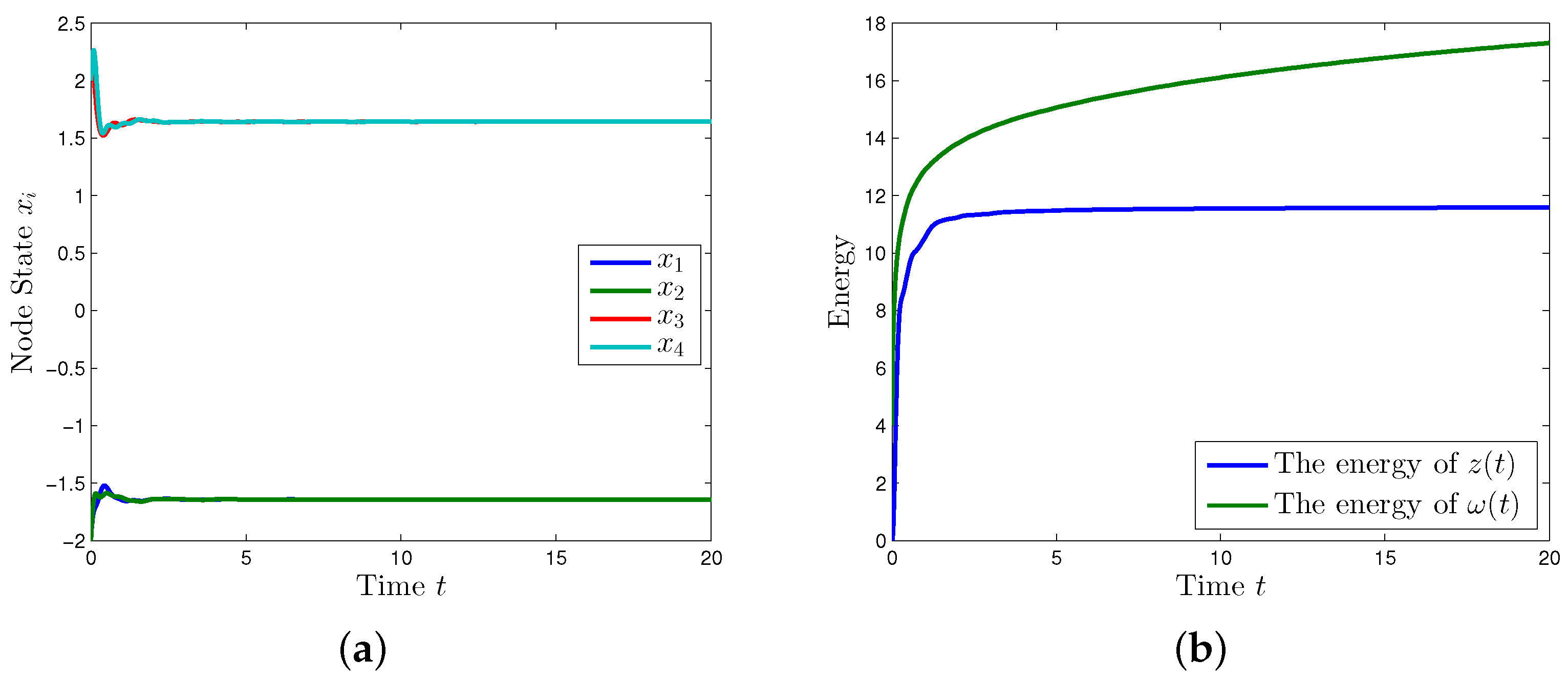
- the bipartite consensus can be achieved for the system (8) if and only if is structurally balanced. Moreover, the terminal value is given bywhere and ν are the right and left eigenvector of L associated with eigenvalue zero, respectively, and .
- (2)
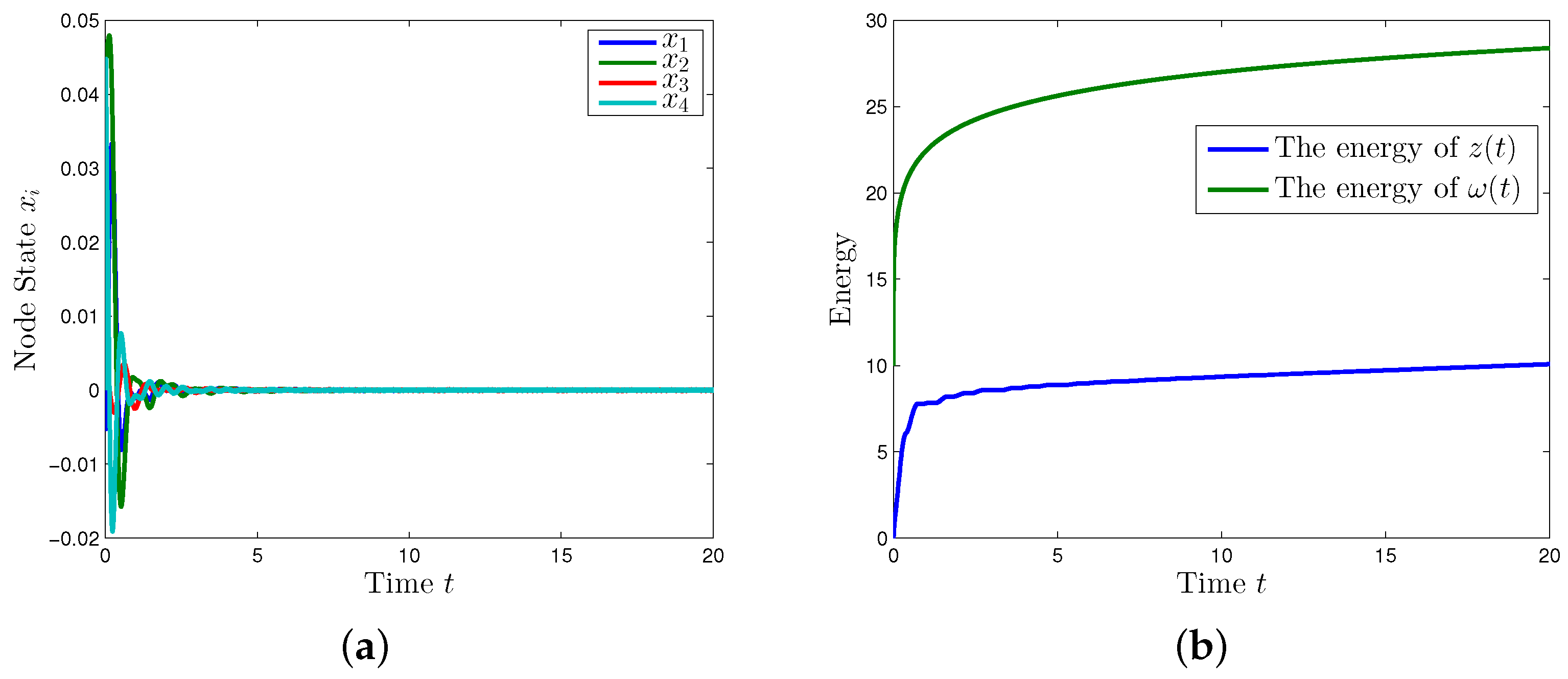
- the state stability can be reached for the system (8) if and only if is structurally unbalanced.
3.1. Nonsingular Transformation
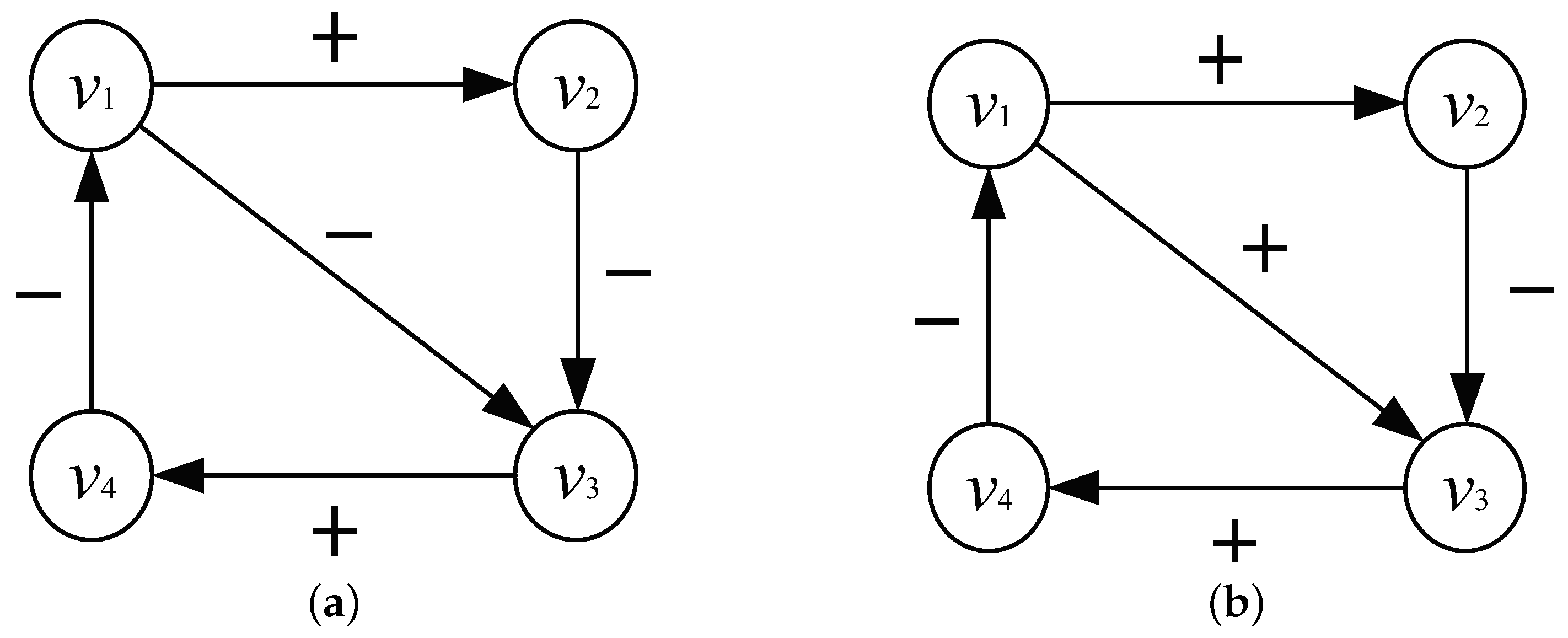
3.2. Structurally Balanced Case
3.3. Structurally Unbalanced Case
4. Main Results
- (1)
- When is structurally balanced, the bipartite consensus objective (5) holds with if and only if there exists a positive definite matrix satisfying the following matrix inequality:In particular, if the external disturbance satisfies Assumption 1, then for arbitrary initial state , the terminal value of the system (4) is provided bywhere and ν are the right and left eigenvector of L associated with the zero eigenvalue, respectively, and and ν satisfy .
- (2)
- When is structurally unbalanced, the state stability objective (6) holds with if and only if there exists a positive definite matrix satisfying the following matrix inequality:
5. Simulation Example
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus seeking in multi-agent systems under dynmicaly changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y.; Li, L. Distributed control H∞ consensus control in directed networks of agents with time-delay. Syst. Control Lett. 2008, 22, 1571–1582. [Google Scholar]
- Lin, P.; Jia, Y. Robust H∞ consensus analysis of a class of second-order multi-agent systems with uncertainty. IET Control Theory Appl. 2010, 4, 487–498. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Z.; Zhang, S. Consensus of second-order multi-agent systems with exogenous disturbances. Int. J. Robust Nonlinear Control 2011, 21, 945–956. [Google Scholar] [CrossRef]
- Du, H.; Li, S.; Shi, P. Robust consensus algorithm for second-order multi-agent systems with external disturbances. Int. J. Control 2012, 85, 1913–1928. [Google Scholar] [CrossRef]
- Meng, D.; Moore, K.L. Studies on resilient control through multiagent consesnsus networks subject to disturbances. IEEE Trans. Cybern. 2014, 44, 2050–2064. [Google Scholar] [CrossRef]
- Xu, C.; Xu, H.; Su, H.; Liu, C. Disturbance-observer based consensus of linear multi-agent systems with exogenous disturbance under intermittent communication. Neurocomputing 2020, 404, 26–33. [Google Scholar] [CrossRef]
- Liu, Y.; Jia, Y. Consensus problem of high-order multi-agent systems with external distrubances: An H∞ analysis approach. Int. J. Robust Nonlinear Control 2010, 20, 1579–1593. [Google Scholar] [CrossRef]
- Liu, Y.; Jia, Y. H∞ consensus control of multi-agent systems with swithcing topology: An dynamic output feedback protocol. Int. J. Control 2010, 83, 527–537. [Google Scholar] [CrossRef]
- Mo, L.; Jia, Y. H∞ consensus control of a class of high-order multi-agent systems. IET Control Theory Appl. 2011, 5, 247–253. [Google Scholar] [CrossRef]
- Wang, J.; Duan, Z.; Wen, G.; Chen, G. Distributed robust control of uncertain linear multi-agent systems. Int. J. Robust Nonlinear Control 2014, 13, 2162–2179. [Google Scholar] [CrossRef]
- Proskurnikov, A.V.; Tempo, R. A tutorial on modeling and analysis of dynamic social networks. Part I. Annu. Rev. Control 2017, 43, 65–79. [Google Scholar] [CrossRef]
- Proskurnikov, A.V.; Tempo, R. A tutorial on modeling and analysis of dynamic social networks. Part II. Annu. Rev. Control 2018, 45, 166–190. [Google Scholar] [CrossRef]
- Altafini, C. Consensus problems on networks with antagonistic interactions. IEEE Trans. Autom. Control 2013, 58, 935–946. [Google Scholar] [CrossRef]
- Meng, D.; Du, M.; Jia, Y. Interval bipartite consensus of networked agents associated with signed digraphs. IEEE Trans. Autom. Control 2016, 61, 3755–3770. [Google Scholar] [CrossRef]
- Gong, X.; Cai, Y.; Shen, J.; Shu, Z.; Huang, T. Distributed prescribed-time interval bipartite consensus of multi-agent systems on directed graphs: Theory and experiment. IEEE Trans. Netw. Sci. Eng. 2021, 8, 613–624. [Google Scholar] [CrossRef]
- Wang, X.; Niu, B.; Zhai, L.; Kong, J.; Wang, X. A novel distributed bipartite consensus control of nonlinear multiagent systems via prioritized strategy approach. IEEE Trans. Cricuits Syst. II Express Briefs 2022, 69, 2852–2856. [Google Scholar] [CrossRef]
- Meng, Z.; Shi, G.; Johansson, K.H.; Cao, M.; Hong, Y. Behaviors of Networks with Antagonistic Interactions and Switching Topologies. Automatica 2016, 73, 110–116. [Google Scholar] [CrossRef]
- Proskurnikov, A.V.; Matveev, A.S.; Cao, M. Opinion dynamics in social networks with hostile camps: Consensus vs. polarization. IEEE Trans. Autom. Control 2016, 61, 1524–1536. [Google Scholar] [CrossRef]
- Wang, W.; Huang, C.; Huang, C.; Cao, J.; Lu, J.; Wang, L. Bipartite formation problem of second-order nonlinear multi-agent systems with hybrid impulses. Appl. Math. Comput. 2020, 370, 124926. [Google Scholar] [CrossRef]
- Li, W.; Zhang, H.; Zhou, Y.; Wang, Y. Bipartite formation tracking for multi-agent systems using fully distributed dynamic edge-event-triggered protocol. IEEE/CAA J. Autom. Sin. 2022, 9, 847–853. [Google Scholar] [CrossRef]
- Duan, J.; Zhang, H.; Liang, Y.; Cai, Y. Bipartite finite-time output consensus of heterogeneous multi-agent systems by finite-time event-triggered observer. Neurocomputing 2019, 365, 86–93. [Google Scholar] [CrossRef]
- Lu, J.; Wang, Y.; Shi, X.; Cao, J. Finite-time bipartite consensus for multiagent systems under detail-balanced antagonistic interactions. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 3867–3875. [Google Scholar] [CrossRef]
- Wen, G.; Wang, H.; Yu, X.; Yu, W. Bipartite tracking consensus of linear multi-agent systems with a dynamic leader. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1024–1028. [Google Scholar] [CrossRef]
- Ren, J.; Song, Q.; Gao, Y.; Lu, G. Leader-following bipartite consensus of second-order time-delay nonlinear multi-agent systems with event-triggered pinning control under signed digraph. Neurocomputing 2020, 385, 186–196. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Lin, C. Command filter based adaptive fuzzy bipartite output consensus tracking of nonlinear coopetition multi-agent systems with input saturation. ISA Trans. 2018, 80, 187–194. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, Z.-P.; Li, T.-S. Data-driven bipartite consensus tracking for nonlinear multiagent systems with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3666–3674. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, J. Bipartite consensus of multi-agent systems over signed graphs: State feedback and output feedback control approaches. Int. J. Robust Nonlinear Control 2017, 27, 3–14. [Google Scholar] [CrossRef]
- Qin, J.; Fu, W.; Zheng, W.; Gao, H. On the bipartite consensus for generic linear multiagent systems with input saturation. IEEE Trans. Cybern. 2017, 47, 1948–1958. [Google Scholar] [CrossRef]
- Hu, J.; Wu, Y.; Li, T.; Ghosh, B.K. Consensus control of general linear multiagent systems with antagonistic interactions and communication noises. IEEE Trans. Autoamtic Control 2019, 64, 2122–2127. [Google Scholar] [CrossRef]
- Ma, Q.; Zhou, G.; Li, E. Adaptive bipartite output consensus of heterogeneous linear multi-agent systems with antagonistic interactions. Neurocomputing 2020, 373, 50–55. [Google Scholar] [CrossRef]
- Jia, Y. Robust H∞ Control; Science Press: Beijing, China, 2007. (In Chinese) [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: New York, NJ, USA, 2002. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, B.; Ma, J.; Du, M. Bipartite Consensus Problems for Directed Signed Networks with External Disturbances. Mathematics 2023, 11, 4828. https://doi.org/10.3390/math11234828
Huo B, Ma J, Du M. Bipartite Consensus Problems for Directed Signed Networks with External Disturbances. Mathematics. 2023; 11(23):4828. https://doi.org/10.3390/math11234828
Chicago/Turabian StyleHuo, Baoyu, Jian Ma, and Mingjun Du. 2023. "Bipartite Consensus Problems for Directed Signed Networks with External Disturbances" Mathematics 11, no. 23: 4828. https://doi.org/10.3390/math11234828
APA StyleHuo, B., Ma, J., & Du, M. (2023). Bipartite Consensus Problems for Directed Signed Networks with External Disturbances. Mathematics, 11(23), 4828. https://doi.org/10.3390/math11234828