
Designing Flexible-Bus System with Ad-Hoc Service Using Travel-Demand Clustering

Abstract
1. Introduction
- A mathematical formulation for the FB routing problem is provided, to simultaneously optimize bus-stop locations, bus routes, and schedules. In order to fulfill some uneconomic travel demands, we add an ad-hoc service that is more accurate with regard to the actual traffic situation and could even further reduce total cost. To solve the suggested model in large-scale networks, we use the simulated-annealing algorithm, which exhibits greater convergence and variety than alternative heuristic algorithms.
- In order to show the adaptability of the clustering approach and FB model, we set a case study by using the taxi-trajectory data from Shenzhen, China. The findings demonstrate that our model can produce flexible bus routes at a lower overall cost, compared with the traditional bus route and taxi service. Furthermore, these FB routes are capable of providing efficient transit services in terms of less walking distances and lower travel costs.
2. Literature Review
2.1. Traditional Transit-Network Design
2.2. Travel-Demand Clustering
2.3. Flexible-Bus Network Design
2.4. Solution Algorithm
3. Methodology
3.1. Problem Description and Assumption
3.2. Mathematical Modeling
4. Solution Algorithm
4.1. Travel-Demand Clustering
| Algorithm 1 ST-DBSCAN Procedure |
|
4.2. Flexible-Bus-Line Planning
4.2.1. Strategic Oscillation for Dealing with Infeasible Solutions
4.2.2. Simulated-Annealing Process
- If < 0, then the movement is approved and the configuration with the modified atomic states is used as the starting state in the following operation;
- If > 0, then the probability, when a new state is accepted, is:
| Algorithm 2 Simulated-Annealing Algorithm |
|
5. Numerical Experiments
5.1. Experiment Setting
5.2. Experiment Results
5.3. Simulations of Three Scenarios
5.3.1. Comparison of Three Scenarios
5.3.2. Sensitivity Analysis of Vehicle Capacity and Speed
6. Case Study Based on the Shenzhen Airport Transport
6.1. Experimental Setting
6.2. Evaluation of Flexible-Bus System
6.2.1. Effectiveness of Clustering
6.2.2. Cost Evaluation
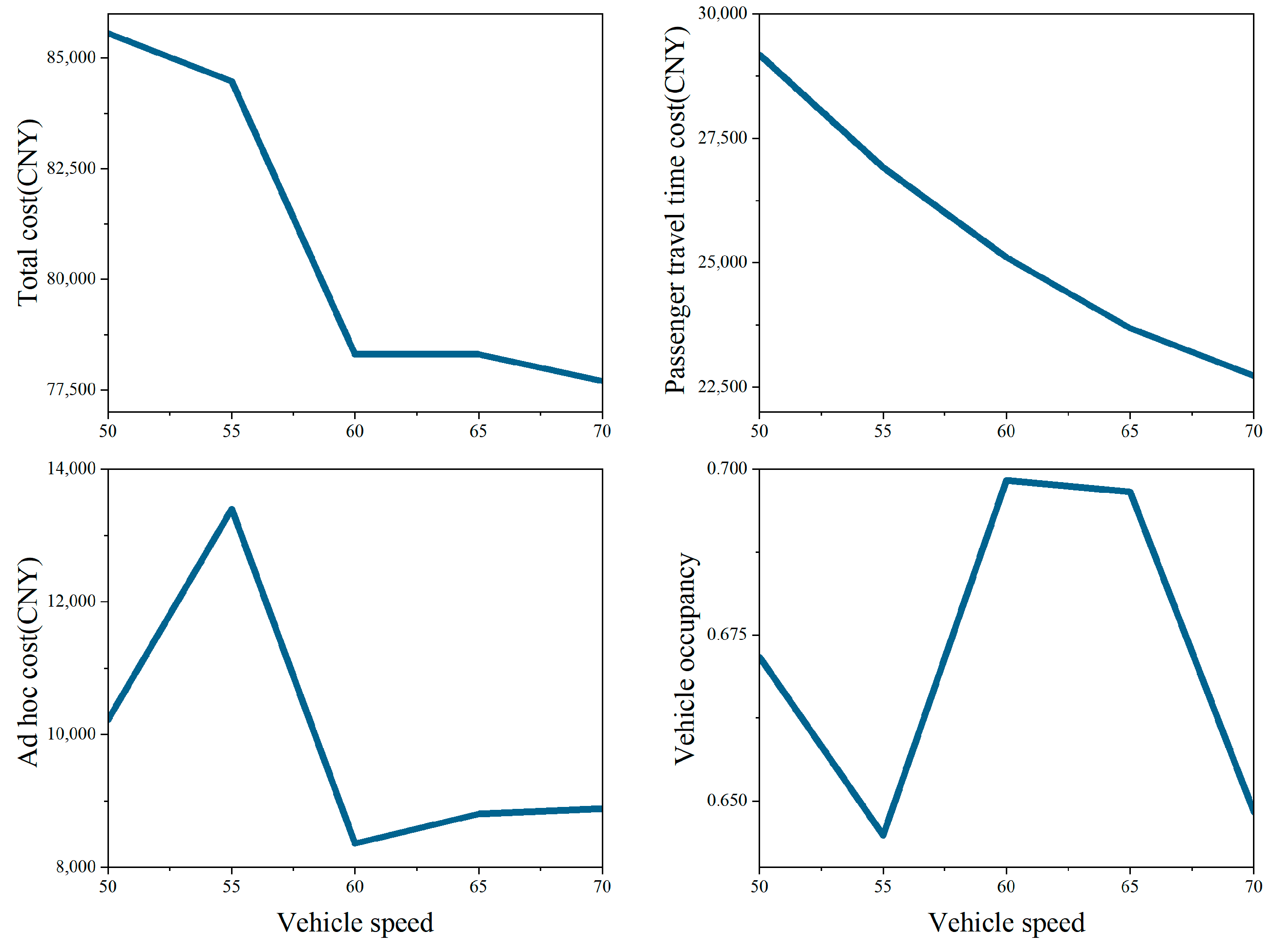
6.2.3. Sensitivity Analysis on Vehicle Capacity and Speed
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, E.; Cen, X.K.; Lo, H.K.; Ng, K.F. Designing Zonal-Based Flexible Bus Services Under Stochastic Demand. Transp. Sci. 2021, 55, 1280–1299. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, D.Z.W.; Meng, M. Which service is better on a linear travel corridor: Park & ride or on-demand public bus? Transp. Res. Part A-Policy Pract. 2018, 118, 803–818. [Google Scholar] [CrossRef]
- Liu, T.; Ceder, A. Analysis of a new public-transport-service concept: Customized bus in China. Transp. Policy 2015, 39, 63–76. [Google Scholar] [CrossRef]
- Lee, E.; Cen, X.K.; Lo, H.K. Zonal-based flexible bus service under elastic stochastic demand. Transp. Res. Part E-Logist. Transp. Rev. 2021, 152, 102367. [Google Scholar] [CrossRef]
- Lyu, Y.; Chow, C.Y.; Lee, V.C.S.; Ng, J.K.Y.; Li, Y.H.; Zeng, J. CB-Planner: A bus line planning framework for customized bus systems. Transp. Res. Part C-Emerg. Technol. 2019, 101, 233–253. [Google Scholar] [CrossRef]
- Guihaire, V.; Hao, J.K. Transit network design and scheduling: A global review. Transp. Res. Part A-Policy Pract. 2008, 42, 1251–1273. [Google Scholar] [CrossRef]
- Ibarra-Rojas, O.J.; Delgado, F.; Giesen, R.; Munoz, J.C. Planning, operation, and control of bus transport systems: A literature review. Transp. Res. Part B-Methodol. 2015, 77, 38–75. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Melis, L.; Aktas, D.; Sorensen, K.; Vieira, F.S.; Montenegro, B.D.G. A survey on demand-responsive public bus systems. Transp. Res. Part C-Emerg. Technol. 2022, 137, 39. [Google Scholar] [CrossRef]
- Wu, M.A.; Yu, C.H.; Ma, W.J.; An, K.; Zhong, Z.H. Joint optimization of timetabling, vehicle scheduling, and ride-matching in a flexible multi-type shuttle bus system. Transp. Res. Part C-Emerg. Technol. 2022, 139, 38. [Google Scholar] [CrossRef]
- Gmira, M.; Gendreau, M.; Lodi, A.; Potvin, J.Y. Managing in real-time a vehicle routing plan with time-dependent travel times on a road network. Transp. Res. Part C-Emerg. Technol. 2021, 132, 15. [Google Scholar] [CrossRef]
- Gu, W.; Yu, J.; Ji, Y.X.; Zheng, Y.J.; Zhang, H.M. Plan-based flexible bus bridging operation strategy. Transp. Res. Part C-Emerg. Technol. 2018, 91, 209–229. [Google Scholar] [CrossRef]
- Cancela, H.; Mauttone, A.; Urquhart, M.E. Mathematical programming formulations for transit network design. Transp. Res. Part B-Methodol. 2015, 77, 17–37. [Google Scholar] [CrossRef]
- Michaelis, M.; Schöbel, A. Integrating line planning, timetabling, and vehicle scheduling: A customer-oriented heuristic. Public Transport 2009, 1, 211–232. [Google Scholar]
- Nayeem, M.A.; Rahman, M.K.; Rahman, M.S. Corrigendum to “Transit network design by genetic algorithm with elitism” [Transport. Res. Part C: Emerg. Technol. 46 (2014) 30–45]. Transp. Res. Part C-Emerg. Technol. 2017, 77, 529–530. [Google Scholar] [CrossRef]
- Nikolic, M.; Teodorovic, D. Transit network design by Bee Colony Optimization. Expert Syst. Appl. 2013, 40, 5945–5955. [Google Scholar] [CrossRef]
- Cipriani, E.; Gori, S.; Petrelli, M. Transit network design: A procedure and an application to a large urban area. Transp. Res. Part C-Emerg. Technol. 2012, 20, 3–14. [Google Scholar] [CrossRef]
- Mauttone, A.; Urquhart, M.E. A route set construction algorithm for the transit network design problem. Comput. Oper. Res. 2009, 36, 2440–2449. [Google Scholar] [CrossRef]
- Perugia, A.; Moccia, L.; Cordeau, J.F.; Laporte, G. Designing a home-to-work bus service in a metropolitan area. Transp. Res. Part B-Methodol. 2011, 45, 1710–1726. [Google Scholar] [CrossRef]
- Szeto, W.Y.; Jiang, Y. Transit route and frequency design: Bi-level modeling and hybrid artificial bee colony algorithm approach. Transp. Res. Part B-Methodol. 2014, 67, 235–263. [Google Scholar] [CrossRef]
- Ceder, A.; Butcher, M.; Wang, L.L. Optimization of bus stop placement for routes on uneven topography. Transp. Res. Part B-Methodol. 2015, 74, 40–61. [Google Scholar] [CrossRef]
- Ma, J.H.; Yang, Y.; Guan, W.; Wang, F.; Liu, T.; Tu, W.Y.; Song, C.Y. Large-Scale Demand Driven Design of a Customized Bus Network: A Methodological Framework and Beijing Case Study. J. Adv. Transp. 2017, 2017, 3865701. [Google Scholar] [CrossRef]
- Crainic, T.G.; Errico, F.; Malucelli, F.; Nonato, M. Designing the master schedule for demand-adaptive transit systems. Ann. Oper. Res. 2012, 194, 151–166. [Google Scholar] [CrossRef]
- Yu, Q.; Li, W.F.; Zhang, H.R.; Yang, D.Y. Mobile Phone Data in Urban Customized Bus: A Network-based Hierarchical Location Selection Method with an Application to System Layout Design in the Urban Agglomeration. Sustainability 2020, 12, 6203. [Google Scholar] [CrossRef]
- Qiu, G.; Song, R.; He, S.W.; Xu, W.T.; Jiang, M. Clustering Passenger Trip Data for the Potential Passenger Investigation and Line Design of Customized Commuter Bus. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3351–3360. [Google Scholar] [CrossRef]
- Li, Z.R.; Liang, C.; Hong, Y.L.; Zhang, Z.J. How Do On-demand Ridesharing Services Affect Traffic Congestion? The Moderating Role of Urban Compactness. Prod. Oper. Manag. 2022, 31, 239–258. [Google Scholar] [CrossRef]
- Shaheen, S.; Chan, N. Mobility and the sharing economy: Potential to facilitate the first-and last-mile public transit connections. Built Environ. 2016, 42, 573–588. [Google Scholar] [CrossRef]
- Wu, X.; Zhi, Q. Impact of shared economy on urban sustainability: From the perspective of social, economic, and environmental sustainability. Energy Procedia 2016, 104, 191–196. [Google Scholar] [CrossRef]
- Tong, L.; Zhou, L.S.; Liu, J.T.; Zhou, X.S. Customized bus service design for jointly optimizing passenger-to-vehicle assignment and vehicle routing. Transp. Res. Part C-Emerg. Technol. 2017, 85, 451–475. [Google Scholar] [CrossRef]
- Petit, A.; Yildirimoglu, M.; Geroliminis, N.; Ouyang, Y.F. Dedicated bus lane network design under demand diversion and dynamic traffic congestion: An aggregated network and continuous approximation model approach. Transp. Res. Part C-Emerg. Technol. 2021, 128, 18. [Google Scholar] [CrossRef]
- Saade, N.; Doig, J.; Cassidy, M.J. Scheduling lane conversions for bus use on city-wide scales and in time-varying congested traffic. Transp. Res. Part C-Emerg. Technol. 2018, 95, 248–260. [Google Scholar] [CrossRef]
- Sheng, D.; Meng, Q.; Li, Z.C. Optimal quality incentive scheme design in contracting out public bus services. Transp. Res. Part C-Emerg. Technol. 2021, 133, 20. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, J. An Optimization Method of Passenger Assignment for Customized Bus. Math. Probl. Eng. 2017, 2017, 9. [Google Scholar] [CrossRef]
- Chuanyu, Z.; Wei, G.; Jie, X.; Shixiong, J. A study on dynamic dispatching strategy of customized bus. In Proceedings of the 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; pp. 751–755. [Google Scholar]
- Chen, X.; Wang, Y.H.; Ma, X.L. Integrated Optimization for Commuting Customized Bus Stop Planning, Routing Design, and Timetable Development With Passenger Spatial-Temporal Accessibility. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2060–2075. [Google Scholar] [CrossRef]
- Guo, R.G.; Zhang, W.Y.; Guan, W.; Ran, B. Time-Dependent Urban Customized Bus Routing With Path Flexibility. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2381–2390. [Google Scholar] [CrossRef]
- Wu, Y.L.; Poon, M.; Yuan, Z.Z.; Xiao, Q.Y. Time-dependent customized bus routing problem of large transport terminals considering the impact of late passengers. Transp. Res. Part C-Emerg. Technol. 2022, 143, 24. [Google Scholar] [CrossRef]
- Chien, S.; Yan, Z.W.; Hou, E. Genetic algorithm approach for transit route planning and design. J. Transp. Eng.-ASCE 2001, 127, 200–207. [Google Scholar] [CrossRef]
- Masmoudi, M.A.; Braekers, K.; Masmoudi, M.; Dammak, A. A hybrid Genetic Algorithm for the Heterogeneous Dial-A-Ride Problem. Comput. Oper. Res. 2017, 81, 1–13. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Yang, M.K.; Guo, Y.J.; Liang, Y.; Ding, Y.F.; Wang, L. The Split Delivery Vehicle Routing Problem with Three-Dimensional Loading and Time Windows Constraints. Sustainability 2020, 12, 6987. [Google Scholar] [CrossRef]
- Sethanan, K.; Jamrus, T. Hybrid differential evolution algorithm and genetic operator for multi-trip vehicle routing problem with backhauls and heterogeneous fleet in the beverage logistics industry. Comput. Ind. Eng. 2020, 146, 8. [Google Scholar] [CrossRef]
- Mogale, D.G.; De, A.; Ghadge, A.; Aktas, E. Multi-objective modelling of sustainable closed-loop supply chain network with price-sensitive demand and consumer’s incentives. Comput. Ind. Eng. 2022, 168, 20. [Google Scholar] [CrossRef]
- Uchimura, K.; Takahashi, H.; Saitoh, T. Demand responsive services in hierarchical public transportation system. IEEE Trans. Veh. Technol. 2002, 51, 760–766. [Google Scholar] [CrossRef]
- Shrivastava, P.; Dhingra, S.L.; Gundaliya, P.J. Application of genetic algorithm for scheduling and schedule coordination problems. J. Adv. Transp. 2002, 36, 23–41. [Google Scholar] [CrossRef]
- Zhao, F.; Zeng, X. Optimization of transit network layout and headway with a combined genetic algorithm and simulated annealing method. Eng. Optimiz. 2006, 38, 701–722. [Google Scholar] [CrossRef]
- Goldbarg, E.F.G.; de Souza, G.R.; Goldbarg, M.C. Particle swarm for the traveling salesman problem. In Evolutionary Computation in Combinatorial Optimization, Proceedings; Gottlieb, J., Raidl, G.R., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2006; Volume 3906, pp. 99–110. [Google Scholar]
- De, A.; Kumar, K.; Gunasekaran, A.; Tiwari, M.K. Sustainable maritime inventory routing problem with time window constraints. Eng. Appl. Artif. Intell. 2017, 61, 77–95. [Google Scholar] [CrossRef]
- Souza, G.R.; Goldbarg, E.F.; Goldbarg, M.C.; Canuto, A.M. A multiagent approach for metaheuristics hybridization applied to the traveling salesman problem. In Proceedings of the 2012 Brazilian Symposium on Neural Networks, Curitiba, Brazil, 20–25 October 2012; pp. 208–213. [Google Scholar]
- Zhou, H.L.; Song, M.L.; Pedrycz, W. A comparative study of improved GA and PSO in solving multiple traveling salesmen problem. Appl. Soft. Comput. 2018, 64, 564–580. [Google Scholar] [CrossRef]
- Rochat, Y.; Taillard, É.D. Probabilistic diversification and intensification in local search for vehicle routing. J. Heuristics 1995, 1, 147–167. [Google Scholar] [CrossRef]
- Adewole, A.; Otubamowo, K.; Egunjobi, T.O.; Ng, K. A comparative study of simulated annealing and genetic algorithm for solving the travelling salesman problem. Int. J. Appl. Inf. Syst. 2012, 4, 6–12. [Google Scholar]
- Wang, C.; Mu, D.; Zhao, F.; Sutherland, J.W. A parallel simulated annealing method for the vehicle routing problem with simultaneous pickup-delivery and time windows. Comput. Ind. Eng. 2015, 83, 111–122. [Google Scholar] [CrossRef]
- Cen, X.K.; Lo, H.K.; Li, L.; Lee, E. Modeling electric vehicles adoption for urban commute trips. Transp. Res. Part B-Methodol. 2018, 117, 431–454. [Google Scholar] [CrossRef]
- Guo, R.G.; Guan, W.; Zhang, W.Y.; Meng, F.T.; Zhang, Z.X. Customized bus routing problem with time window restrictions: Model and case study. Transp. A Transp. Sci. 2019, 15, 1804–1824. [Google Scholar] [CrossRef]
- Birant, D.; Kut, A. ST-DBSCAN: An algorithm for clustering spatial-temp oral data. Data Knowl. Eng. 2007, 60, 208–221. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Glover, F.; Gutin, G.; Yeo, A.; Zverovich, A. Construction heuristics for the asymmetric TSP. Eur. J. Oper. Res. 2001, 129, 555–568. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Gendreau, M.; Laporte, G. A tabu search heuristic for periodic and multi-depot vehicle routing problems. Netw. Int. J. 1997, 30, 105–119. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The granular tabu search and its application to the vehicle-routing problem. Inf. J. Comput. 2003, 15, 333–346. [Google Scholar] [CrossRef]
- Khachaturyan, A.; Semenovsovskaya, S.; Vainshtein, B. The thermodynamic approach to the structure analysis of crystals. Acta Crystallogr. Sect. A Cryst. Phys. Diffr. Theor. Gen. Crystallogr. 1981, 37, 742–754. [Google Scholar] [CrossRef]
- Černý, V. Thermodynamical approach to the traveling salesman problem: An efficient simulation algorithm. J. Optim. Theory Appl. 1985, 45, 41–51. [Google Scholar] [CrossRef]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef]
- Grabusts, P.; Musatovs, J.; Golenkov, V. The application of simulated annealing method for optimal route detection between objects. Procedia Comput. Sci. 2019, 149, 95–101. [Google Scholar] [CrossRef]
- Tang, M.; Ji, B.; Fang, X.P.; Yu, S.S. Discretization-Strategy-Based Solution for Berth Allocation and Quay Crane Assignment Problem. J. Mar. Sci. Eng. 2022, 10, 495. [Google Scholar] [CrossRef]
- Ciampi, A.; Lechevallier, Y.; Limas, M.C.; Marcos, A.G. Hierarchical clustering of subpopulations with a dissimilarity based on the likelihood ratio statistic: Application to clustering massive data sets. Pattern Anal. Appl. 2008, 11, 199–220. [Google Scholar] [CrossRef]
- Daniels, R.; Mulley, C. Explaining walking distance to public transport: The dominance of public transport supply. J. Transp. Land Use 2013, 6, 5–20. [Google Scholar] [CrossRef]
- Yang, H.; Ke, J.T.; Ye, J.P. A universal distribution law of network detour ratios. Transp. Res. Part C-Emerg. Technol. 2018, 96, 22–37. [Google Scholar] [CrossRef]
- De, A.; Wang, J.W.; Tiwari, M.K. Hybridizing Basic Variable Neighborhood Search With Particle Swarm Optimization for Solving Sustainable Ship Routing and Bunker Management Problem. IEEE Trans. Intell. Transp. Syst. 2020, 21, 986–997. [Google Scholar] [CrossRef]
- Mogale, D.G.; De, A.; Ghadge, A.; Tiwari, M.K. Designing a sustainable freight transportation network with cross-docks. Int. J. Prod. Res. 2022, 1–24. [Google Scholar] [CrossRef]
- De, A.R.J.; Gorton, M.; Hubbard, C.; Aditjandra, P. Optimization model for sustainable food supply chains: An application to Norwegian salmon. Transp. Res. Part E-Logist. Transp. Rev. 2022, 161, 22. [Google Scholar] [CrossRef]
- Lee, E.; Cen, X.; Lo, H.K. Scheduling zonal-based flexible bus service under dynamic stochastic demand and Time-dependent travel time. Transp. Res. Part E Logist. Transp. Rev. 2022, 168, 102931. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| Sets and Indices | |
| , | Depot instance |
| Set of vertices | |
| Set of stations | |
| Indices of vertices | |
| Set of origins | |
| Set of destinations | |
| Index of origins | |
| Index of destinations | |
| Set of distribution paths(say ), which are sent from the origin, , to the destination, . | |
| Set of arcs connecting pairs of vertices | |
| Index of arcs | |
| Set of arcs departing from vertex | |
| Set of arcs returning to vertex | |
| Set of vehicles | |
| Index of vehicles | |
| Parameters | |
| Fixed cost per vehicle (FB) | |
| Fixed cost per taxi (ad-hoc service) | |
| Operating cost of vehicles (FB) per kilometer | |
| Operating cost of taxis per kilometer (ad-hoc service) | |
| Travel-time cost per passenger per minute | |
| Waiting-time cost per passenger per minute | |
| Distance of arc | |
| Total distance of an OD pair (say ), which starts from and returns to the depot | |
| Travel time of arc () by vehicles (FB), also calculated by | |
| Travel time of arc () by taxis, also calculated by | |
| Service time at vertex | |
| Travel demand from origin r to destination | |
| Earliest arrival time at station | |
| Latest departure time at station | |
| Earliest arrival time at depot | |
| Latest departure time at depot 0 | |
| The latest arrival time of the clustered demands at pick-up point | |
| Vehicle average speed (FB) | |
| Taxi average speed (ad-hoc service) | |
| Minimum-load requirement | |
| Vehicle capacity | |
| Lower limit of route length | |
| Upper limit of route length | |
| Maximum station quantity for the route | |
| A large number, = 107 | |
| Intermediate variable | |
| Integer variable indicating number of passengers in vehicle at vertex i | |
| Continuous variable indicating arrival time of vehicle at vertex | |
| Decision variables | |
| Binary variable, equal to 1 if arc() is on the optimal route of vehicle k | |
| Binary variable, equal to 1 if an pair (say ) is served by vehicle | |
| Integer variable indicating passenger quantity-of-travel demand, , in vehicle |
| Parameters | SA | ||
|---|---|---|---|
| S * | M * | L * | |
| Maximum iteration | 1000 | 1500 | 2000 |
| Swap probability | 0.2 | 0.2 | 0.2 |
| Reversion probability | 0.5 | 0.5 | 0.5 |
| Initial annealing temperature (°C) | 100 | 100 | 100 |
| Rate of temperature change | 0.99 | 0.99 | 0.99 |
| Nodes | CPLEX | SA | (%) | (%) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Cost (CNY *) | T (s) | Min * (CNY) | Mean * (CNY) | SD * (CNY) | CV * (%) | T * (s) | |||
| 8 | 2140 | 9.13 | 2140 | 2491 | 378 | 15.19 | 45.10 | 0 | 494 |
| 10 | 3105 | 474.13 | 3191 | 3665 | 445 | 12.15 | 55.75 | 2.77 | 12 |
| 16 | 4998 * | 3619.45 | 5254 | 5520 | 327 | 5.92 | 67.78 | - | - |
| 18 | 8436.5 * | 3625.27 | 8689 | 9140 | 434 | 4.75 | 75.72 | - | - |
| 24 | - | - | 23,231 | 24,014 | 643 | 2.68 | 89.36 | - | - |
| 32 | - | - | 33,695 | 36,927 | 2730 | 7.39 | 90.70 | - | - |
| 40 | - | - | 39,192 | 43,214 | 3414 | 7.90 | 119.34 | - | - |
| 48 | - | - | 46,638 | 51,407 | 2855 | 5.55 | 136.53 | - | - |
| Results | FB with Ad Hoc Service | FB | Taxi | Gap1 (%) | Gap2 (%) |
|---|---|---|---|---|---|
| Cos.(CNY) | 23,552 | 26,345 | 47,759 | 11.86 | 102.78 |
| Veh.(veh) | 4 | 4 | 37 | 0 | 825.00 |
| Ser.(person) | 35 | 37 | 37 | 5.71 | 5.71 |
| Uns.(person) | 2 | 0 | 0 | −100.00 | −100.00 |
| Tim.(h) | 37.69 | 39.73 | 46.80 | 5.42 | 24.17 |
| Leg.(km) | 503.63 | 847.40 | 4108.93 | 68.26 | 715.86 |
| Results | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|
| Vehicle capacity | 7 | 8 | 10 | 12 |
| Factor of operating cost | 0.85 | 0.9 | 1 | 1.1 |
| Total cost (CNY) | 28,082 | 32,168 | 23,552 | 25,612 |
| Vehicle used | 2 | 3 | 4 | 3 |
| Vehicle occupancy | 59.52% | 41.67% | 48.75% | 42.59% |
| Fixed cost (CNY) | 1000 | 1500 | 2000 | 1500 |
| Vehicle-operating cost (CNY) | 5288.7 | 8589 | 9065 | 9328.5 |
| Passenger-travel-time cost (CNY) | 6440 | 6726 | 9046 | 8631 |
| Ad hoc cost (CNY) | 15,353 | 15,353 | 3441 | 6152 |
| Results | Scenario 4 | Scenario 5 | Scenario 3 | Scenario 6 | Scenario 7 |
|---|---|---|---|---|---|
| Vehicle speed | 35 | 40 | 45 | 50 | 55 |
| Vehicle capacity | 10 | 10 | 10 | 10 | 10 |
| Total cost (CNY) | 28,161 | 25,924 | 23,552 | 23,119 | 22,134 |
| Vehicle used | 4 | 3 | 4 | 3 | 3 |
| Vehicle occupancy | 61.25% | 56.11% | 48.75% | 43.33% | 50.00% |
| Fixed cost (CNY) | 2000 | 1500 | 2000 | 1500 | 1500 |
| Vehicle-operating cost (CNY) | 8955 | 8580.6 | 9065.4 | 9972.4 | 9715.2 |
| Passenger-travel-time cost (CNY) | 11,053 | 9690.9 | 9045.6 | 8205.8 | 7477.4 |
| Ad hoc cost (CNY) | 6152.1 | 6152.1 | 3441 | 3441 | 3441 |
| Parameter | Value |
|---|---|
| Fixed cost per vehicle (FB) | 500 CNY/veh |
| Fixed cost per taxi | 200 CNY/veh |
| Operating cost of vehicles (FB) | 18 CNY/km |
| Operating cost of taxis | 8 CNY/km |
| Travel-time cost per passenger | 8 CNY/min |
| Waiting-time cost per passenger | 4 CNY/min |
| Maximum iteration | 2000 |
| Swap probability | 0.2 |
| Reversion probability | 0.5 |
| Initial annealing temperature | 100 |
| Rate of temperature change | 0.99 |
| Results | FB with Ad Hoc service | FB | Taxi | Gap 1(%) | Gap 2(%) |
|---|---|---|---|---|---|
| Cos.(CNY) | 78,301 | 84,628 | 165,410 | 8.08 | 111.25 |
| Veh.(veh) | 29 | 34 | 421 | 17.24 | 1351.72 |
| Ser.(person) | 405 | 421 | 421 | 3.95 | 3.95 |
| Uns.(person) | 16 | 0 | 0 | −100.00 | −100.00 |
| Tim.(h) | 104.62 | 124.00 | 224.96 | 18.52 | 115.03 |
| Leg.(km) | 1578.60 | 1988.70 | 9926.70 | 25.98 | 528.83 |
| Route of Buses (Stops Visited by the Bus) | Number of Served Passengers |
|---|---|
| Bus1: 0→122→103→52→12→0 | 16 |
| Bus2: 0→113→18→105→42→0 | 13 |
| Bus3: 0→125→87→128→96→0 | 15 |
| Bus4: 0→60→97→55→7→0 | 13 |
| Bus5: 0→127→32→79→8→0 | 19 |
| Bus6: 0→31→117→57→86→0 | 10 |
| Bus7: 0→126→4→29→114→0 | 17 |
| Bus8: 0→112→108→123→93→0 | 20 |
| Bus9: 0→22→63→34→16→0 | 14 |
| Bus10: 0→43→109→90→131→0 | 13 |
| Bus11: 0→2→50→104→130→0 | 9 |
| Bus12: 0→95→119→47→21→0 | 13 |
| Bus13: 0→121→24→74→118→0 | 15 |
| Bus14: 0→71→20→94→68→0 | 16 |
| Bus15: 0→56→45→44→101→0 | 13 |
| Bus16: 0→61→15→10→30→0 | 14 |
| Bus17: 0→6→129→27→89→0 | 17 |
| Bus18: 0→13→82→9→107→0 | 13 |
| Bus19: 0→51→38→14→0 | 8 |
| Bus20: 0→26→85→116→39→0 | 18 |
| Bus21: 0→46→111→106→81→0 | 16 |
| Bus22: 0→70→37→102→35→0 | 15 |
| Bus23: 0→58→75→100→92→0 | 13 |
| Bus24: 0→59→99→120→53→0 | 13 |
| Bus25: 0→115→23→69→11→0 | 16 |
| Bus26: 0→88→36→28→67→0 | 11 |
| Bus27: 0→54→98→25→17→0 | 10 |
| Bus28: 0→5→64→124→40→0 | 13 |
| Bus29: 0→19→62→91→33→0 | 12 |
| Results | Scenario 8 | Scenario 9 | Scenario 10 | Scenario 11 |
|---|---|---|---|---|
| Vehicle capacity | 15 | 20 | 25 | 30 |
| Factor of operating cost | 0.9 | 1 | 1.1 | 1.2 |
| Total cost (CNY) | 81,137 | 78,301 | 84,951 | 86,362 |
| Vehicle used | 34 | 29 | 30 | 28 |
| Vehicle occupancy | 80.78% | 69.83% | 51.60% | 47.50% |
| Fixed cost (CNY) | 17,000 | 14,500 | 15,000 | 14,000 |
| Vehicle-operating cost (CNY) | 30,804 | 28,414 | 32,450 | 34,979 |
| Passenger-travel-time cost (CNY) | 26,704 | 25,108 | 26,306 | 24,253 |
| Passenger-waiting-time cost (CNY) | 1686 | 1917 | 1893 | 1757 |
| Ad hoc cost (CNY) | 4943 | 8362 | 9302 | 11,372 |
| Results | Scenario 12 | Scenario 13 | Scenario 9 | Scenario 14 | Scenario 15 |
|---|---|---|---|---|---|
| Vehicle speed | 50 | 55 | 60 | 65 | 70 |
| Vehicle capacity | 20 | 20 | 20 | 20 | 20 |
| Total cost (CNY) | 85,560 | 84,479 | 78,301 | 78,308 | 77,706 |
| Vehicle used | 30 | 29 | 29 | 29 | 29 |
| Vehicle occupancy | 67.17% | 64.48% | 69.83% | 69.66% | 64.83% |
| Fixed cost (CNY) | 15,000 | 14,500 | 14,500 | 14,500 | 14,500 |
| Vehicle-operating cost (CNY) | 29,374 | 27,886 | 28,414 | 29,452 | 29,637 |
| Passenger-travel-time cost (CNY) | 29,179 | 26,917 | 25,108 | 23,683 | 22,725 |
| Passenger-waiting-time cost (CNY) | 1782 | 1779 | 1917 | 1871 | 1962 |
| Ad hoc cost (CNY) | 10,225 | 13,398 | 8362 | 8802 | 8882 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cen, X.; Ren, K.; Cai, Y.; Chen, Q. Designing Flexible-Bus System with Ad-Hoc Service Using Travel-Demand Clustering. Mathematics 2023, 11, 825. https://doi.org/10.3390/math11040825
Cen X, Ren K, Cai Y, Chen Q. Designing Flexible-Bus System with Ad-Hoc Service Using Travel-Demand Clustering. Mathematics. 2023; 11(4):825. https://doi.org/10.3390/math11040825
Chicago/Turabian StyleCen, Xuekai, Kanghui Ren, Yiying Cai, and Qun Chen. 2023. "Designing Flexible-Bus System with Ad-Hoc Service Using Travel-Demand Clustering" Mathematics 11, no. 4: 825. https://doi.org/10.3390/math11040825
APA StyleCen, X., Ren, K., Cai, Y., & Chen, Q. (2023). Designing Flexible-Bus System with Ad-Hoc Service Using Travel-Demand Clustering. Mathematics, 11(4), 825. https://doi.org/10.3390/math11040825