
A Structure-Preserving Finite Volume Scheme for a Hyperbolic Reformulation of the Navier–Stokes–Korteweg Equations


Abstract
:1. Introduction
2. Mathematical Model
2.1. Hyperbolic Reformulation of the Navier–Stokes–Korteweg Equations
2.2. The Van der Waals Equation of State
2.3. First-Order Hyperbolic Reformulation of the NSK Equations
2.4. Hyperbolicity
3. Numerical Method
3.1. Setting and Notations
3.2. Flux Splitting
3.3. Compatible Discrete Operators and Curl-Free Discretization
3.4. Second Order MUSCL-Hancock-Type Scheme for the Remaining Terms
4. Numerical Results
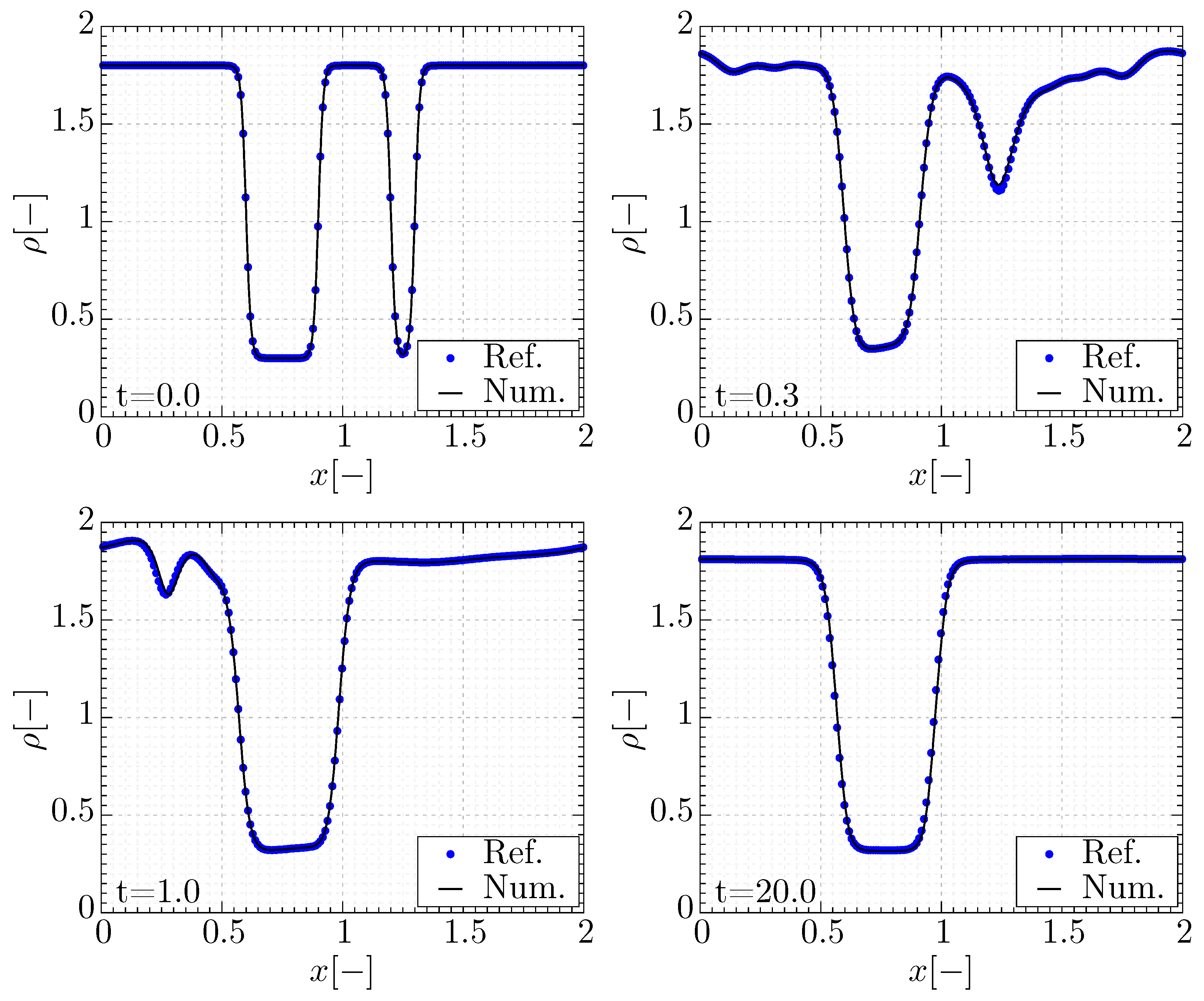
4.1. One-Dimensional Ostwald Ripening
4.2. 2D Stationary Droplet
4.3. Non-Condensing Bubble
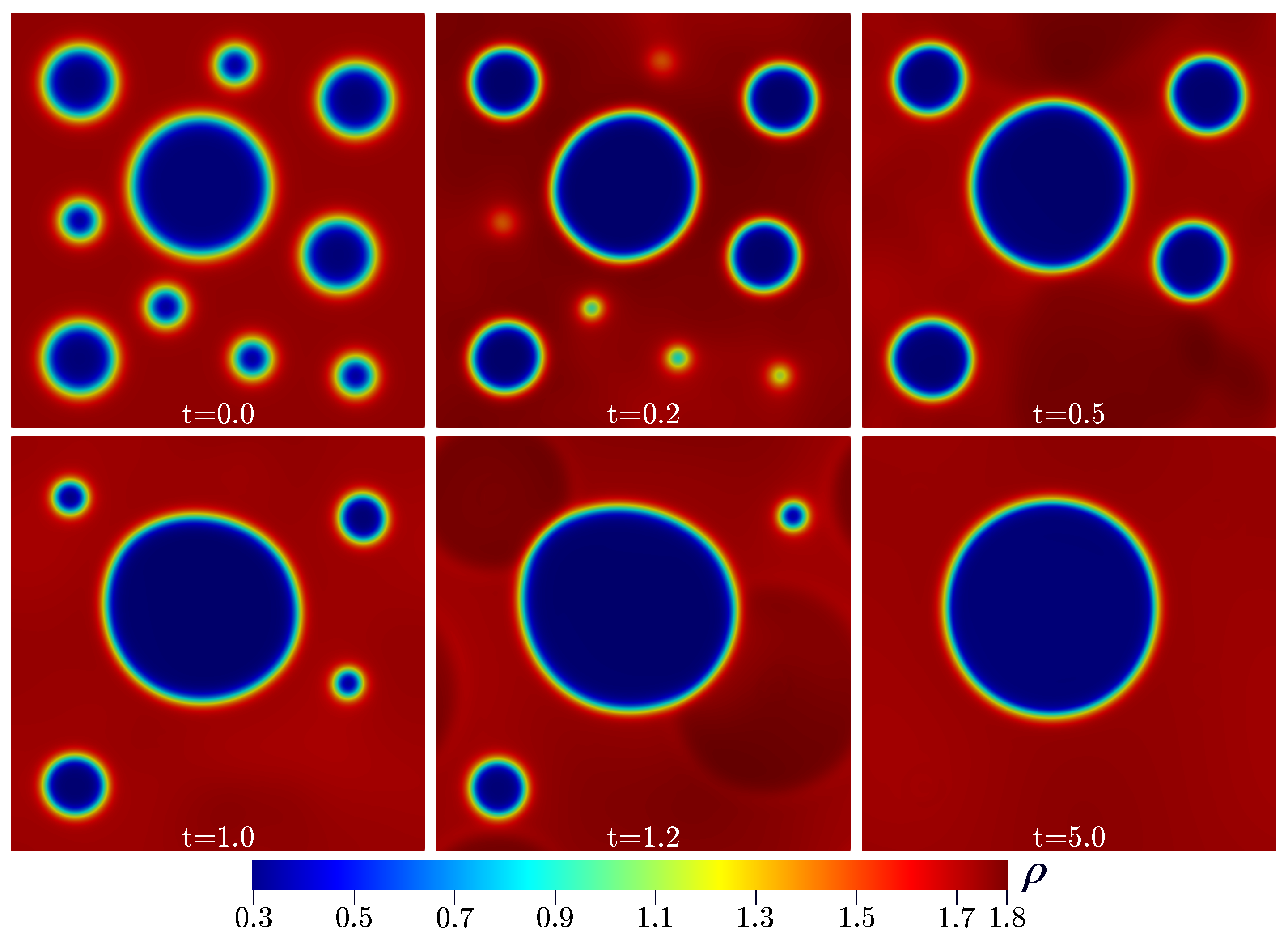
4.4. Two-Dimensional Ostwald Ripening
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADER | Arbitrary high order using Derivatives |
| BVP | Boundary Value Problem |
| CFL | Courant–Friedrichs–Lewy number |
| DG | Discontinuous Galerkin |
| EK | Euler–Korteweg |
| FV | Finite Volumes |
| GLM | Generalized Lagrangian Multiplier |
| GPR | Godunov-Peshkov-Romenski |
| HNSK | Hyperbolic reformulation of Navier–Stokes–Korteweg |
| NSK | Navier–Stokes–Korteweg |
| TVD | Total Variation Diminishing |
References
- Klainermann, S.; Majda, A. Singular Limits of Quasilinear Hyperbolic Systems with Large Parameters and the Incompressible Limit of Compressible Fluid. Comm. Pure Appl. Math. 1981, 34, 481–524. [Google Scholar] [CrossRef]
- Klainermann, S.; Majda, A. Compressible and incompressible fluids. Commun. Pure Appl. Math. 1982, 35, 629–651. [Google Scholar] [CrossRef]
- Munz, C.; Klein, R.; Roller, S.; Geratz, K. The extension of incompressible flow solvers to the weakly compressible regime. Comput. Fluids 2003, 32, 173–196. [Google Scholar] [CrossRef]
- Godunov, S.; Romenski, E. Nonstationary equations of the nonlinear theory of elasticity in Euler coordinates. J. Appl. Mech. Tech. Phys. 1972, 13, 868–885. [Google Scholar] [CrossRef]
- Romenski, E. Hyperbolic systems of thermodynamically compatible conservation laws in continuum mechanics. Math. Comput. Model. 1998, 28, 115–130. [Google Scholar] [CrossRef]
- Dumbser, M.; Peshkov, I.; Romenski, E.; Zanotti, O. High order ADER schemes for a unified first order hyperbolic formulation of continuum mechanics: Viscous heat-conducting fluids and elastic solids. J. Comput. Phys. 2016, 314, 824–862. [Google Scholar] [CrossRef]
- Peshkov, I.; Romenski, E. A hyperbolic model for viscous Newtonian flows. Contin. Mech. Thermodyn. 2016, 28, 85–104. [Google Scholar] [CrossRef]
- Godunov, S.; Romenski, E. Elements of Continuum Mechanics and Conservation Laws; Kluwer Academic/Plenum Publishers: Dordrecht, The Netherlands, 2003. [Google Scholar]
- Peshkov, I.; Pavelka, M.; Romenski, E.; Grmela, M. Continuum mechanics and thermodynamics in the Hamilton and the Godunov-type formulations. Contin. Mech. Thermodyn. 2018, 30, 1343–1378. [Google Scholar] [CrossRef]
- Romenski, E.; Drikakis, D.; Toro, E. Conservative models and numerical methods for compressible two-phase flow. J. Sci. Comput. 2010, 42, 68–95. [Google Scholar] [CrossRef]
- Alic, D.; Bona, C.; Bona-Casas, C. Towards a gauge-polyvalent numerical relativity code. Phys. Rev. D 2009, 79, 044026. [Google Scholar] [CrossRef] [Green Version]
- Brown, J.D.; Diener, P.; Field, S.E.; Hesthaven, J.S.; Herrmann, F.; Mroué, A.H.; Sarbach, O.; Schnetter, E.; Tiglio, M.; Wagman, M. Numerical simulations with a first-order BSSN formulation of Einstein’s field equations. Phys. Rev. D 2012, 85, 084004. [Google Scholar] [CrossRef]
- Dumbser, M.; Fambri, F.; Gaburro, E.; Reinarz, A. On GLM curl cleaning for a first order reduction of the CCZ4 formulation of the Einstein field equations. J. Comput. Phys. 2020, 404, 109088. [Google Scholar] [CrossRef]
- Brackbill, J.U.; Barnes, D.C. The Effect of Nonzero div(B) on the numerical solution of the magnetohydrodynamic equations. J. Comput. Phys. 1980, 35, 426–430. [Google Scholar] [CrossRef]
- Brackbill, J. Fluid modeling of magnetized plasmas. Space Sci. Rev. 1985, 42, 153–167. [Google Scholar] [CrossRef]
- Balsara, D.; Spicer, D. A Staggered Mesh Algorithm Using High Order Godunov Fluxes to Ensure Solenoidal Magnetic Fields in Magnetohydrodynamic Simulations. J. Comput. Phys. 1999, 149, 270–292. [Google Scholar] [CrossRef]
- Chiocchetti, S.; Dumbser, M. An exactly curl-free staggered semi-implicit finite volume scheme for a first order hyperbolic model of viscous flow with surface tension. J. Sci. Comput. 2023, 94, 24. [Google Scholar] [CrossRef]
- Chiocchetti, S.; Peshkov, I.; Gavrilyuk, S.; Dumbser, M. High order ADER schemes and GLM curl cleaning for a first order hyperbolic formulation of compressible flow with surface tension. J. Comput. Phys. 2021, 426, 109898. [Google Scholar] [CrossRef]
- Yee, K. Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar]
- Holland, R. Finite-difference solution of Maxwell’s equations in generalized nonorthogonal coordinates. IEEE Trans. Nucl. Sci. 1983, 30, 4589–4591. [Google Scholar] [CrossRef]
- Brecht, S.; Lyon, J.; Fedder, J.; Hain, K. A simulation study of east–west IMF effects on the magnetosphere. Geophys. Res. Lett. 1981, 8, 397–400. [Google Scholar] [CrossRef]
- Evans, C.R.; Hawley, J.F. Simulation of magnetohydrodynamic flows-A constrained transport method. Astrophys. J. 1988, 332, 659–677. [Google Scholar] [CrossRef]
- DeVore, C.R. Flux-corrected transport techniques for multidimensional compressible magnetohydrodynamics. J. Comput. Phys. 1991, 92, 142–160. [Google Scholar] [CrossRef]
- Dai, W.; Woodward, P.R. A simple finite difference scheme for multidimensional magnetohydrodynamical equations. J. Comput. Phys. 1998, 142, 331–369. [Google Scholar] [CrossRef]
- Tóth, G. The ∇ · B = 0 constraint in shock-capturing magnetohydrodynamics codes. J. Comput. Phys. 2000, 161, 605–652. [Google Scholar] [CrossRef]
- Gardiner, T.A.; Stone, J.M. An unsplit Godunov method for ideal MHD via constrained transport. J. Comput. Phys. 2005, 205, 509–539. [Google Scholar] [CrossRef]
- Munz, C.; Omnes, P.; Schneider, R.; Sonnendrücker, E.; Voss, U. Divergence Correction Techniques for Maxwell Solvers Based on a Hyperbolic Model. J. Comput. Phys. 2000, 161, 484–511. [Google Scholar] [CrossRef]
- Dedner, A.; Kemm, F.; Kröner, D.; Munz, C.D.; Schnitzer, T.; Wesenberg, M. Hyperbolic Divergence Cleaning for the MHD Equations. J. Comput. Phys. 2002, 175, 645–673. [Google Scholar] [CrossRef]
- Dedner, A.; Rohde, C.; Wesenberg, M. A new approach to divergence cleaning in magnetohydrodynamic simulations. In Hyperbolic Problems: Theory, Numerics, Applications; Springer: New York, NY, USA, 2003; pp. 509–518. [Google Scholar]
- Jacobs, G.; Hesthaven, J.S. Implicit–explicit time integration of a high-order particle-in-cell method with hyperbolic divergence cleaning. Comput. Phys. Commun. 2009, 180, 1760–1767. [Google Scholar] [CrossRef]
- Busto, S.; Dumbser, M.; Escalante, C.; Gavrilyuk, S.; Favrie, N. On high order ADER discontinuous Galerkin schemes for first order hyperbolic reformulations of nonlinear dispersive systems. J. Sci. Comput. 2021, 87, 48. [Google Scholar] [CrossRef]
- Dhaouadi, F.; Dumbser, M. A first order hyperbolic reformulation of the Navier–Stokes-Korteweg system based on the GPR model and an augmented Lagrangian approach. J. Comput. Phys. 2022, 470, 111544. [Google Scholar] [CrossRef]
- Balsara, D. Second-Order Accurate Schemes for Magnetohydrodynamics with Divergence-Free Reconstruction. Astrophys. J. Suppl. Ser. 2004, 151, 149–184. [Google Scholar] [CrossRef]
- Xu, Z.; Balsara, D.S.; Du, H. Divergence-free WENO reconstruction-based finite volume scheme for solving ideal MHD equations on triangular meshes. Commun. Comput. Phys. 2016, 19, 841–880. [Google Scholar] [CrossRef]
- Hazra, A.; Chandrashekar, P.; Balsara, D.S. Globally constraint-preserving FR/DG scheme for Maxwell’s equations at all orders. J. Comput. Phys. 2019, 394, 298–328. [Google Scholar] [CrossRef]
- Balsara, D.S.; Simpson, J.J. Making a synthesis of FDTD and DGTD schemes for computational electromagnetics. IEEE J. Multiscale Multiphysics Comput. Tech. 2020, 5, 99–118. [Google Scholar] [CrossRef]
- Balsara, D.; Käppeli, R.; Boscheri, W.; Dumbser, M. Curl constraint-preserving reconstruction and the guidance it gives for mimetic scheme design. Commun. Appl. Math. Comput. Sci. 2021, 1–60. [Google Scholar] [CrossRef]
- Audiard, C.; Haspot, B. Global well-posedness of the Euler–Korteweg system for small irrotational data. Commun. Math. Phys. 2017, 351, 201–247. [Google Scholar] [CrossRef]
- Benzoni-Gavage, S. Planar traveling waves in capillary fluids. Differ. Integral Equ. 2013, 26, 439–485. [Google Scholar] [CrossRef]
- Benzoni-Gavage, S.; Danchin, R.; Descombes, S. On the well-posedness for the Euler–Korteweg model in several space dimensions. Indiana Univ. Math. J. 2007, 56, 1499–1580. [Google Scholar] [CrossRef]
- Benzoni-Gavage, S.; Descombes, S.; Jamet, D.; Mazet, L. Structure of Korteweg models and stability of diffuse interfaces. Interfaces Free Boundaries 2005, 7, 371–414. [Google Scholar] [CrossRef]
- Bresch, D.; Gisclon, M.; Lacroix-Violet, I. On Navier–Stokes–Korteweg and Euler–Korteweg systems: Application to quantum fluids models. Arch. Ration. Mech. Anal. 2019, 233, 975–1025. [Google Scholar] [CrossRef]
- Bresch, D.; Couderc, F.; Noble, P.; Vila, J.P. New extended formulations of euler-korteweg equations based on a generalization of the quantum bohm identity. arXiv 2015, arXiv:1503.08678. [Google Scholar]
- Bresch, D.; Couderc, F.; Noble, P.; Vila, J. A generalization of the quantum Bohm identity: Hyperbolic CFL condition for Euler–Korteweg equations. Comptes Rendus Math. 2016, 354, 39–43. [Google Scholar] [CrossRef] [Green Version]
- Casal, P.; Gouin, H. A representation of liquid-vapor interfaces by using fluids of second grade. Annales de Physique 1988, 13, 3–12. [Google Scholar]
- Gavrilyuk, S.L.; Shugrin, S.M. Media With Equations of State That Depend on derivatives. J. Appl. Mech. Tech. Phys. 1996, 37, 177–189. [Google Scholar] [CrossRef]
- Haspot, B. Existence of strong solutions for nonisothermal Korteweg system. Ann. MathÉMatiques Blaise Pascal 2009, 16, 431–481. [Google Scholar] [CrossRef]
- Noble, P.; Vila, J. Stability theory for difference approximations of some dispersive shallow water equations and application to thin film flows. arXiv 2013, arXiv:1304.3805. [Google Scholar]
- Anderson, D.; McFadden, G.; Wheeler, A. Diffuse-interface methods in fluid mechanics. Annu. Rev. Fluid Mech. 1998, 30, 139–165. [Google Scholar] [CrossRef]
- Diehl, D.; Kremser, J.; Kröner, D.; Rohde, C. Numerical solution of Navier–Stokes-Korteweg systems by Local Discontinuous Galerkin methods in multiple space dimensions. Appl. Math. Comput. 2016, 272, 309–335. [Google Scholar] [CrossRef]
- Rohde, C. A local and low-order Navier–Stokes–Korteweg system. Nonlinear Part. Differ. Equ. Hyperbolic Wave Phenom. 2010, 526, 315–337. [Google Scholar]
- Corli, A.; Rohde, C.; Schleper, V. Parabolic approximations of diffusive–dispersive equations. J. Math. Anal. Appl. 2014, 414, 773–798. [Google Scholar] [CrossRef]
- Neusser, J.; Rohde, C.; Schleper, V. Relaxation of the Navier–Stokes–Korteweg equations for compressible two-phase flow with phase transition. Int. J. Numer. Methods Fluids 2015, 79, 615–639. [Google Scholar] [CrossRef]
- Chertock, A.; Degond, P.; Neusser, J. An asymptotic-preserving method for a relaxation of the Navier–Stokes–Korteweg equations. J. Comput. Phys. 2017, 335, 387–403. [Google Scholar] [CrossRef]
- Hitz, T.; Keim, J.; Munz, C.; Rohde, C. A parabolic relaxation model for the Navier–Stokes-Korteweg equations. J. Comput. Phys. 2020, 421, 109714. [Google Scholar] [CrossRef]
- Keim, J.; Munz, C.D.; Rohde, C. A Relaxation Model for the Non-Isothermal Navier–Stokes-Korteweg Equations in Confined Domains. J. Comput. Phys. 2022. submitted. [Google Scholar] [CrossRef]
- Kapila, A.; Menikoff, R.; Bdzil, J.; Son, S.; Stewart, D. Two-phase modelling of DDT in granular materials: Reduced equations. Phys. Fluids 2001, 13, 3002–3024. [Google Scholar] [CrossRef]
- Andrianov, N.; Warnecke, G. The Riemann problem for the Baer–Nunziato two-phase flow model. J. Comput. Phys. 2004, 212, 434–464. [Google Scholar] [CrossRef]
- Saurel, R.; Abgrall, R. A Multiphase Godunov Method for Compressible Multifluid and Multiphase Flows. J. Comput. Phys. 1999, 150, 425–467. [Google Scholar] [CrossRef]
- Abgrall, R.; Saurel, R. Discrete equations for physical and numerical compressible multiphase mixtures. J. Comput. Phys. 2003, 186, 361–396. [Google Scholar] [CrossRef]
- Favrie, N.; Gavrilyuk, S. Diffuse interface model for compressible fluid - Compressible elastic-plastic solid interaction. J. Comput. Phys. 2012, 231, 2695–2723. [Google Scholar] [CrossRef]
- Ndanou, S.; Favrie, N.; Gavrilyuk, S. Multi–solid and multi–fluid diffuse interface model: Applications to dynamic fracture and fragmentation. J. Comput. Phys. 2015, 295, 523–555. [Google Scholar] [CrossRef]
- Favrie, N.; Gavrilyuk, S.; Saurel, R. Solid–fluid diffuse interface model in cases of extreme deformations. J. Comput. Phys. 2009, 228, 6037–6077. [Google Scholar] [CrossRef]
- de Brauer, A.; Iollo, A.; Milcent, T. A Cartesian Scheme for Compressible Multimaterial Hyperelastic Models with Plasticity. Commun. Comput. Phys. 2017, 22, 1362–1384. [Google Scholar] [CrossRef]
- Barton, P.T. An interface-capturing Godunov method for the simulation of compressible solid-fluid problems. J. Comput. Phys. 2019, 390, 25–50. [Google Scholar] [CrossRef]
- De Lorenzo, M.; Pelanti, M.; Lafon, P. HLLC-type and path-conservative schemes for a single–velocity six-equation two-phase flow model: A comparative study. Appl. Math. Comput. 2018, 333, 95–117. [Google Scholar] [CrossRef]
- Kemm, F.; Gaburro, E.; Thein, F.; Dumbser, M. A simple diffuse interface approach for compressible flows around moving solids of arbitrary shape based on a reduced Baer-Nunziato model. Comput. Fluids 2020, 204, 104536. [Google Scholar] [CrossRef] [Green Version]
- Re, B.; Abgrall, R. A pressure-based method for weakly compressible two-phase flows under a Baer–Nunziato type model with generic equations of state and pressure and velocity disequilibrium. Int. J. Numer. Methods Fluids 2022, 94, 1183–1232. [Google Scholar] [CrossRef]
- Thein, F.; Romenski, E.; Dumbser, M. Exact and numerical solutions of the Riemann problem for a conservative model of compressible two-phase flows. J. Sci. Comput. 2022, 93, 83. [Google Scholar] [CrossRef]
- Lukácová-Medvidóvá, M.; Puppo, G.; Thomann, A. An all Mach number finite volume method for isentropic two-phase flow. J. Numer. Math. 2023, in press. [Google Scholar] [CrossRef]
- Dhaouadi, F.; Favrie, N.; Gavrilyuk, S. Extended Lagrangian approach for the defocusing nonlinear Schrödinger equation. Stud. Appl. Math. 2019, 142, 336–358. [Google Scholar] [CrossRef]
- Dhaouadi, F.; Gavrilyuk, S.; Vila, J.P. Hyperbolic relaxation models for thin films down an inclined plane. Appl. Math. Comput. 2022, 433, 127378. [Google Scholar] [CrossRef]
- Dhaouadi, F. An augmented lagrangian Approach for Euler–Korteweg Type Equations. Ph.D. Thesis, Université Paul Sabatier-Toulouse III, Toulouse, France, 2020. [Google Scholar]
- Boscheri, W.; Dumbser, M.; Ioriatti, M.; Peshkov, I.; Romenski, E. A structure-preserving staggered semi-implicit finite volume scheme for continuum mechanics. J. Comput. Phys. 2010, 424, 109866. [Google Scholar] [CrossRef]
- Balsara, D. A two-dimensional HLLC Riemann solver for conservation laws: Application to Euler and magnetohydrodynamic flows. J. Comput. Phys. 2012, 231, 7476–7503. [Google Scholar] [CrossRef]
- Balsara, D. Multidimensional Riemann problem with self-similar internal structure—Part I—Application to hyperbolic conservation laws on structured meshes. J. Comput. Phys. 2014, 277, 163–200. [Google Scholar] [CrossRef]
- Dumbser, M.; Balsara, D.S.; Tavelli, M.; Fambri, F. A divergence-free semi-implicit finite volume scheme for ideal, viscous and resistive magnetohydrodynamics. Int. J. Numer. Methods Fluids 2019, 89, 16–42. [Google Scholar] [CrossRef]
- van der Waals, J.D. The thermodynamic theory of capillarity under the hypothesis of a continuous variation of density. J. Stat. Phys. 1979, 20, 200–244. [Google Scholar] [CrossRef]
- van der Waals, J.D. Over de Continuiteit van den Gas- en Vloei Stof Toestand. Ph.D. Thesis, University of Leiden, South Holland, The Netherlands, 1873. [Google Scholar]
- Toro, E. Riemann Solvers and Numerical Methods for Fluid Dynamics, 2nd ed.; Springer: New York, NY, USA, 1999. [Google Scholar]
- Ascher, U.; Christiansen, J.; Russell, R. A collocation solver for mixed order systems of boundary value problems. Math. Comput. 1979, 33, 659–679. [Google Scholar] [CrossRef]
- Ascher, U.; Christiansen, J.; Russell, R. Collocation software for boundary-value ODEs. ACM Trans. Math. Softw. (TOMS) 1981, 7, 209–222. [Google Scholar] [CrossRef]
- Bader, G.; Ascher, U. A new basis implementation for a mixed order boundary value ODE solver. SIAM J. Sci. Stat. Comput. 1987, 8, 483–500. [Google Scholar] [CrossRef]
- Tavelli, M.; Dumbser, M. A pressure-based semi-implicit space-time discontinuous Galerkin method on staggered unstructured meshes for the solution of the compressible Navier–Stokes equations at all Mach numbers. J. Comput. Phys. 2017, 341, 341–376. [Google Scholar] [CrossRef]
- Fambri, F.; Dumbser, M. Semi-implicit discontinuous Galerkin methods for the incompressible Navier-Stokes equations on adaptive staggered Cartesian grids. Comput. Methods Appl. Mech. Eng. 2017, 324, 170–203. [Google Scholar] [CrossRef]
- Busto, S.; Dumbser, M.; Peshkov, I.; Romenski, E. On thermodynamically compatible finite volume schemes for continuum mechanics. SIAM J. Sci. Comput. 2022, 44, A1723–A1751. [Google Scholar] [CrossRef]
- Abgrall, R.; Busto, S.; Dumbser, M. A simple and general framework for the construction of thermodynamically compatible schemes for computational fluid and solid mechanics. Appl. Math. Comput. 2023, 440, 127629. [Google Scholar] [CrossRef]
- Gaburro, E.; Öffner, P.; Ricchiuto, M.; Torlo, D. High order entropy preserving ADER-DG schemes. Appl. Math. Comput. 2023, 440, 127644. [Google Scholar] [CrossRef]
- Busto, S.; Dumbser, M. A new thermodynamically compatible finite volume scheme for magnetohydrodynamics. SIAM J. Numer. Anal. 2023, in press. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| − | − | − | − | − | − | − | |
| k | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| −0.05 | −0.40 | −0.40 | 0.40 | 0.35 | −0.40 | 0.05 | −0.15 | 0.10 | 0.40 | |
| 0.10 | −0.40 | 0.40 | 0.35 | −0.10 | −0.00 | 0.45 | −0.25 | −0.40 | −0.45 | |
| 0.2 | 0.10 | 0.10 | 0.10 | 0.10 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhaouadi, F.; Dumbser, M. A Structure-Preserving Finite Volume Scheme for a Hyperbolic Reformulation of the Navier–Stokes–Korteweg Equations. Mathematics 2023, 11, 876. https://doi.org/10.3390/math11040876
Dhaouadi F, Dumbser M. A Structure-Preserving Finite Volume Scheme for a Hyperbolic Reformulation of the Navier–Stokes–Korteweg Equations. Mathematics. 2023; 11(4):876. https://doi.org/10.3390/math11040876
Chicago/Turabian StyleDhaouadi, Firas, and Michael Dumbser. 2023. "A Structure-Preserving Finite Volume Scheme for a Hyperbolic Reformulation of the Navier–Stokes–Korteweg Equations" Mathematics 11, no. 4: 876. https://doi.org/10.3390/math11040876