1. Introduction
Many researchers have investigated the phenomenon of sloshing using various methods: analytical [
1,
2], numerical or experimental. They have observed that different types of baffles, inserted in tanks [
3], can reduce the natural sloshing frequencies. For example, analytical studies, numerical experiments and moving particle semi-implicit computation have been carried out using porous baffles for sloshing reduction in a swaying rectangular tank by Cho and Kim [
4], and Poguluri Sunny Kumar [
5], using the Galerkin method and Chebyshev polynomials for modelling and simulating the sloshing phenomenon in a porous screen-equipped tank.
It is assumed that the fuel in the tank is an incompressible fluid, and the potential formulation can be used to describe its free surface. The determination of the free surface inside the tank is closely related to the correct approximation of the sound generated by the ripple. However, the potential formulation may not always accurately express the reality [
6], and numerical modelling might be necessary to produce more realistic results. The nonlinearities generated by sudden braking can also be numerically studied.
The main methods used in numerical analysis include: MAC (Marker and Cell) approximation, VOF (Volume of Fluid Method) approximation, LSM method (Level Set Method) or a combination of these methods. More recently, the SPH (Smoothed Particle Hydrodynamics) approximation [
7] has been used in 2D numerical modelling to simulate sound propagation [
8]. The slosh noise that occurs in a fuel tank can be a hit noise due to a wave hitting the walls of the tank, or a splash noise due to turbulence and the agglomeration of small waves inside the fuel tank. These can be studied through the oscillatory movement of the free surface of the liquid inside the fuel tank. A vertical baffle is more effective in reducing the sloshing amplitude than a horizontal one.
An improved MPS method and numerical simulation under an initial rotational excitation are made in [
9], and it is proved that when the baffle is flush with the surface, the damping effect is optimal. An improved ALE technique (Arbitrary Langrangian Eulerian finite element method) was used in [
10] to improve the tank design to reduce noise levels. With the same optimization goal, Frosina et al. in [
11] use a CFD (Computational Fluid Dynamics) modelling approach to study the correct fuel suction under all driving conditions.
In this paper, the main variables that affect the ripple phenomenon are considered: liquid depth, tank geometry, and the frequency and amplitude of the initial external force acting on the tank. To reduce the wave nonlinearities and noise, various types of breakers can be installed in the tank. These breakers aim to reduce the pressure on the ceiling or walls, as well as to reduce extreme fluid phenomena, including ripples.
This paper is organized as follows: the problem description, general principles and hypotheses are considered in the next section.
Section 3 is dedicated to the mathematical model of the fluid flow in the tank without a slosh noise reduction baffle. The fluid flow is determined by the potential of the velocity, using the method of fundamental solutions and describing the amplitude evolution of the free surface. In
Section 4, the noise reduction baffle is introduced into the model. The solution of the potential function in the two areas delimited by the baffle is obtained, and the evolution of the free surface is graphically represented. The effects of using a suitable baffle are investigated. Finally, some conclusions are made.
3. Mathematical Model of the Fluid Flow in the Tank without a Slosh Noise Reduction Baffle
The fluid flow is determined by the potential
of the fluid velocity that verifies the Laplace equation
and boundary conditions:
on the side walls, and on the floor
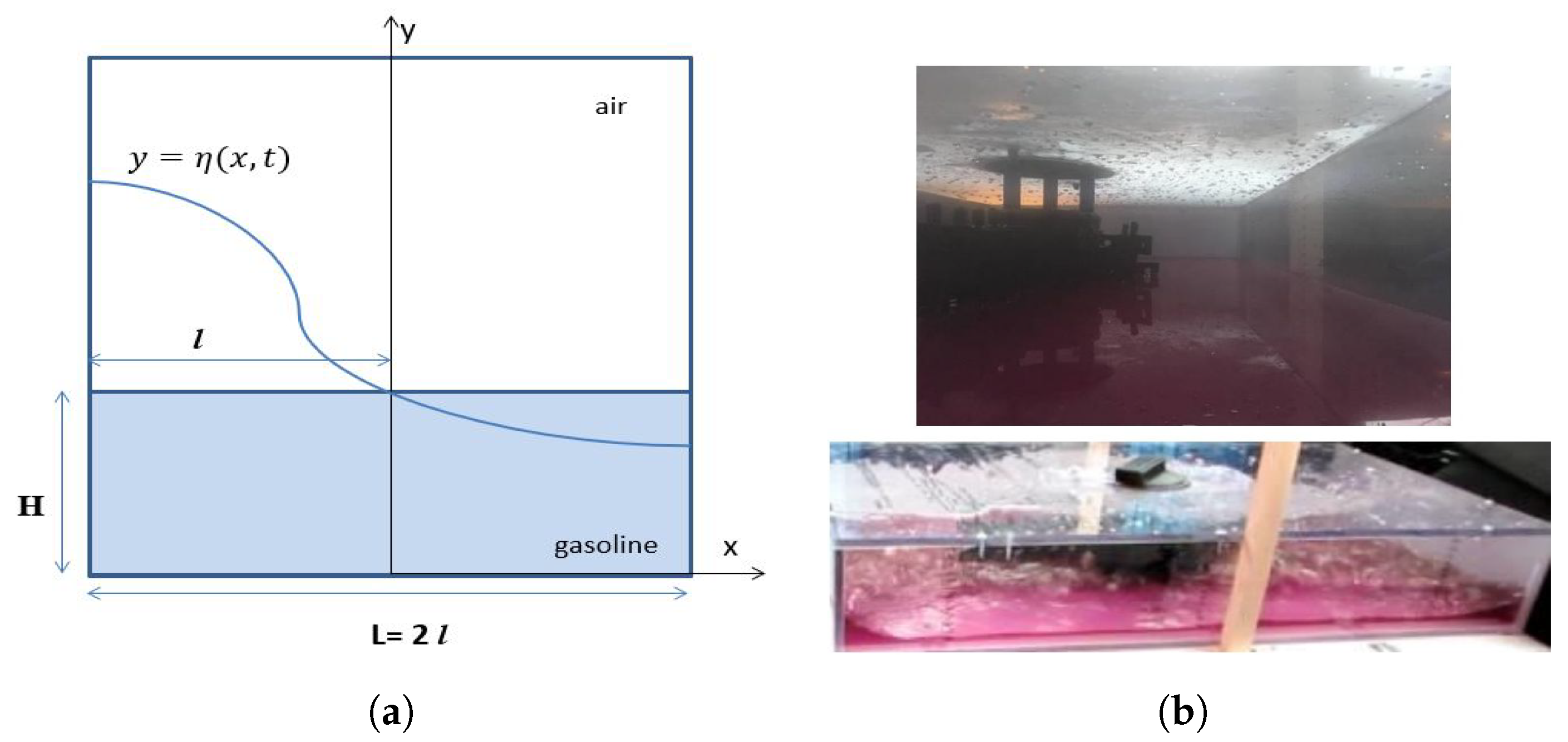
according with the geometry of the tank as in
Figure 1.
The width of the tank is considered in the x direction (520 mm), the length in the z direction (1000 mm) and the height in the y direction (160 mm). The origin is considered in the middle of the bottom of the surface of the tank. Additionally, H is the height of the liquid in the tank.
The boundary condition (
6) expressed for passing from the inertial coordinate system to the tank fixed coordinate system leads to the conditions imposed upon the free surface
, see [
13], that are the cinematic condition:
and dynamic condition
As the liquid is incompressible, the potential energy of a liquid element is given only by the potential gravitational energy [
3,
14,
15,
16]:
and the kinetic energy of the liquid element is given by [
3,
16]:
When the tank is subjected to a horizontal acceleration,
lateral sounds of the contained fluid will appear, where:
is the total stop time of the tank (
),
,
, and constant
a represents the average value of the acceleration (of braking, in this case). Based on the state of the art of the topic developed by the authors, the optimal timing for the braking event that generates the slosh noise phenomena is 5 s. This duration it is used for the analytical model and experimental tests [
17,
18,
19,
20,
21,
22].
Movement in the tank is described by the potential
that is decomposed into two functions:
where
is the solution of the Laplace’s equation with static conditions on the walls:
and
also satisfies the Laplace’s equation in
D and the following boundary conditions:
Analytical Model (Ma) for Determining the Potential
The potential will be determined using the superposition method of the liquid’s own functions in the tank, based on the linearized theory of potentials, compared to the nonlinear Boussinesq model [
12].
We use the method of fundamental solutions (MFS), also described in [
12,
13], and consider that the potential has the form
where
are the fundamental solutions that verify the Laplace equation,
with the conditions (
17)–(
19). One finds, for the functions
, the problem
with the boundary conditions (considered linear, in the first approximation)
and where the first potential
is a particular solution that takes into account the movement of the tank, verifies the Laplace equation and non-homogeneous boundary conditions
For the free surface of the fuel, we have
with
in linear theory. Considering the derivative according with t in (
23), respectively, in (
25) we obtain
and
have separate variables, and one obtains:
from where
Using the solutions for (
28), the fundamental solution for the potential is
checking the boundary conditions
From the condition
, where
H is the height of the fuel in the tank, the constants
are determined. For
, we have the solution
and the amplitude of the free surface is:
To determine the potential
and amplitude
, we solve the problem (
22)–(
23), where
corresponding to braking.
For calculating the amplitude
, a pendulum equation is used (see [
12]).
with
. Under the given problem, the value
is positive and for
and
,
, the solution of the Equation (
35) has the form
constants
being determined from the initial conditions as
For the given issue, we consider conditions compatible with relationships (
25) and (
31).
meaning that
The amplitude
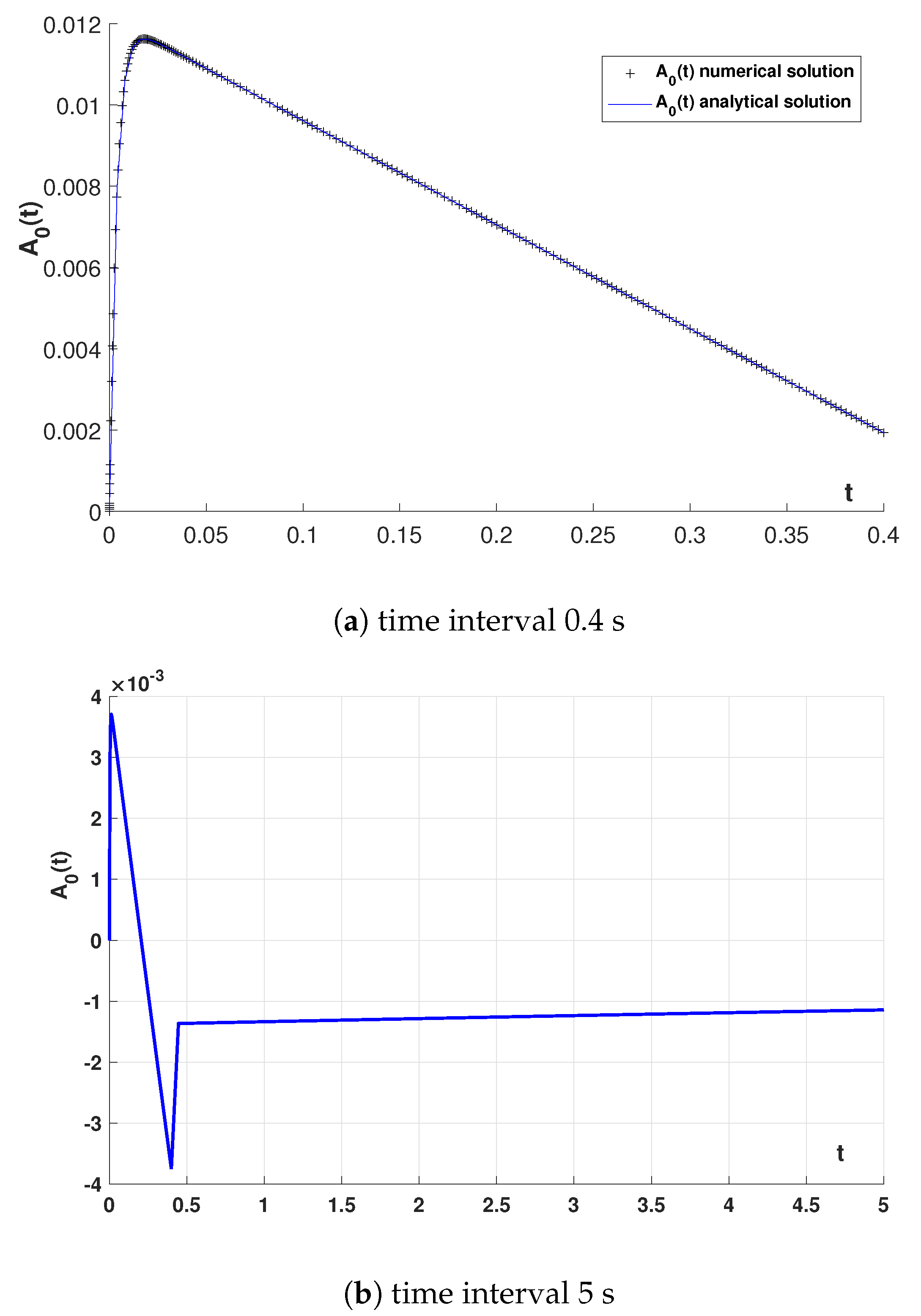
analytically obtained in (
36) and numerically computed using a Runge–Kutta method in MatLab was plotted on the same graph in
Figure 2a. Because of the accuracy of the calculus, only one method was used in
Figure 2b.
The maximum amplitude is measured a short time after braking ([0, 0.4] to [0, 0.8] seconds). As seen in
Figure 2a, for a time interval of [0, 0.4], the free surface follows a slight climb and stagnation. Additionally, as seen in
Figure 2b, the “quietness” of the waves inside the tank is observed.
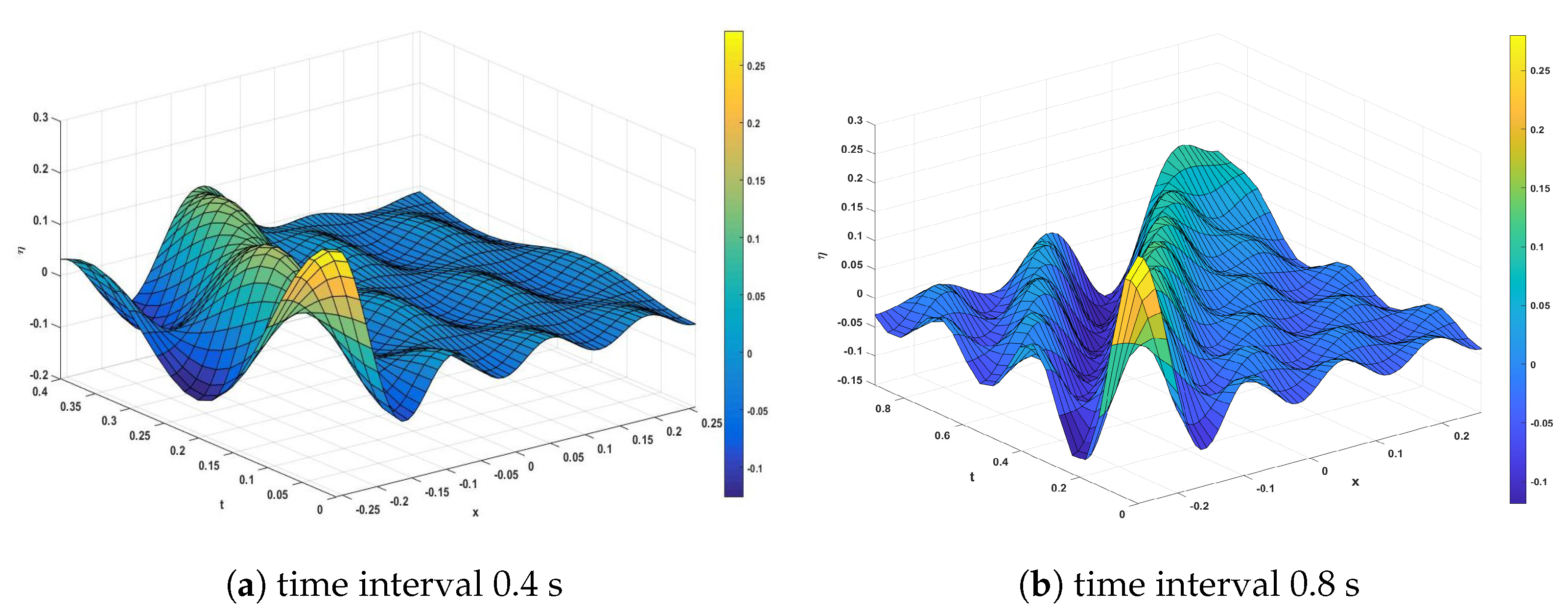
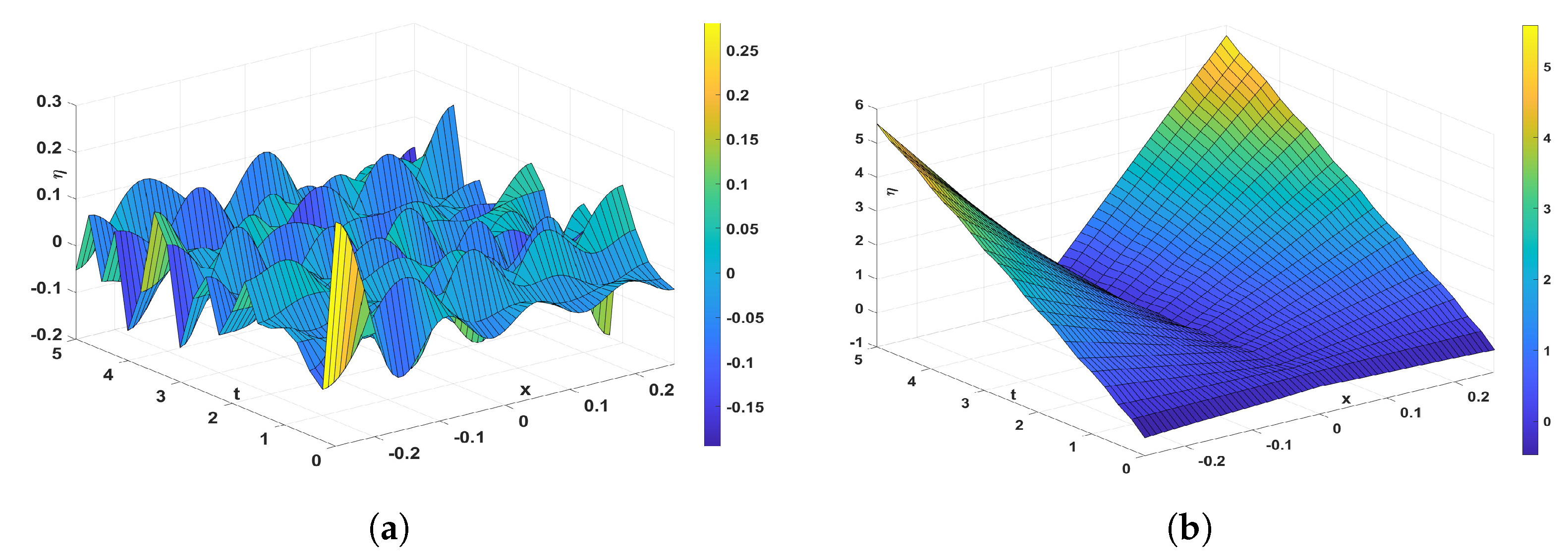
If a fuel tank does not contain wave breakers, a large wave is generated followed by successive smaller waves that will hit each other (
Figure 3). The noise generated in this case represents the phenomenon of slosh noise, which is unpleasant for the user.
According to relation (
36), when the time increases after
, the amplitude will be larger then the case
if the term
is bigger then the sum of the first two terms. That fact leads to the change of wave shape expressed in
Figure 3.
As a remark, for Boussinesq’s non-linear model with a slight disturbance of amplitude, the linear conditions on the free surface will change [
23]. Using cinematic condition (
25) for any
,
and the dynamic condition for the free surface
, one finds the governing equation for the potential:
In [
12], the free surface elevation is made precise, the expression of the velocity potential of the first sloshing mode is given and the coefficient
was described by an approximation. The relative free surface elevations at the left wall with different excitation frequencies were numerically computed. We have analytically defined the time variation of the amplitude and the free surface inside the tank. Additionally, in [
16], only numerical results were obtained.
4. Mathematical Model of the Fluid Flow in the Tank with a Slosh Noise Reduction Baffle
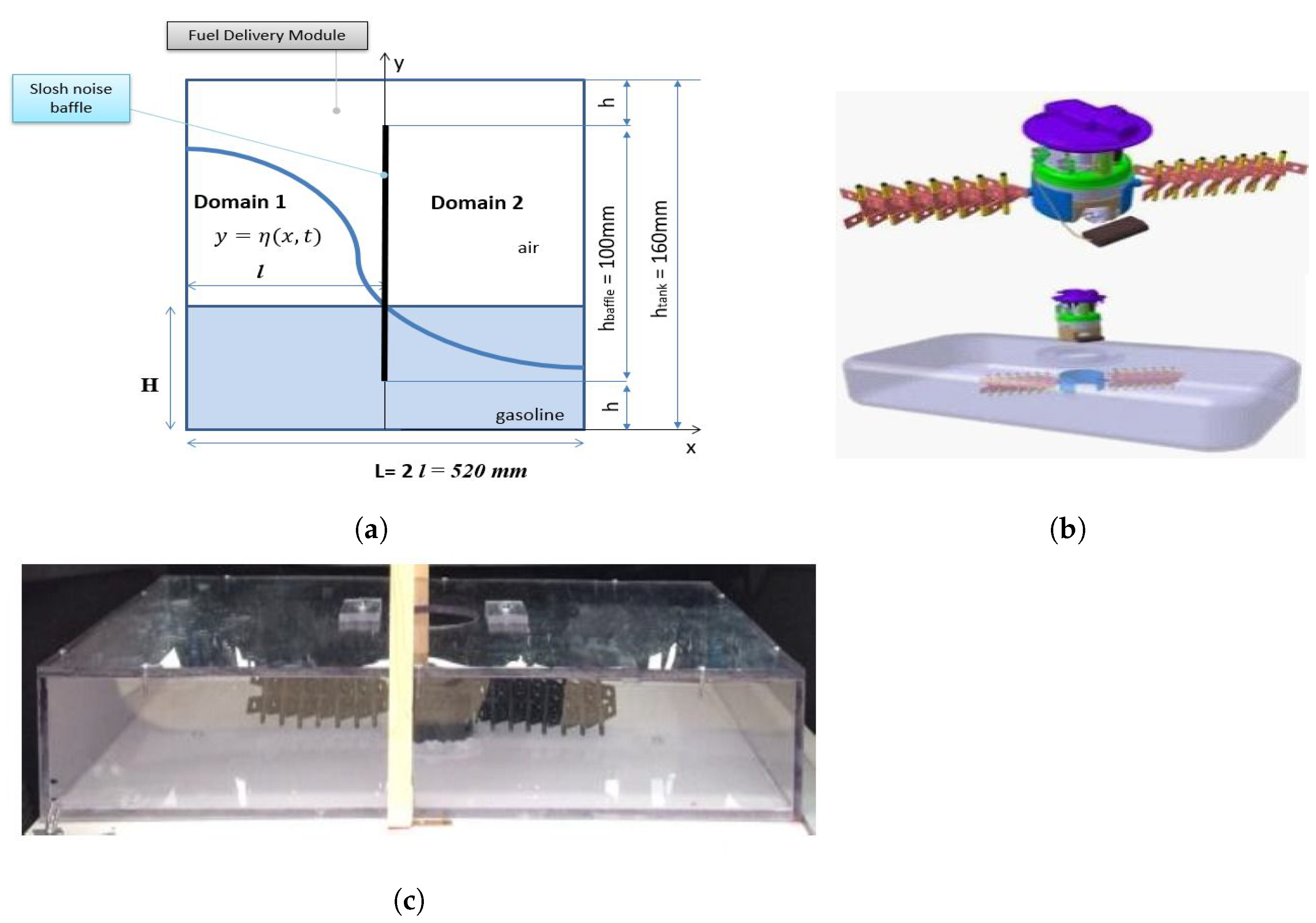
The initial status of a tank that includes a wave breaker is outlined in the
Figure 4, where: h = 30 mm, tank length = 1000 mm, tank width (L) = 520 mm, and tank height = 160 mm.
We consider the movement of the free surface on the width of the tank as flat movement in the
plane (in the transverse plane) and with the same values of the amplitude at any section along the length of the tank. According to the geometry shown in
Figure 4a, with
= notation for the presence of a slosh noise baffle inside the tank and
= notation for the case without the presence of a slosh noise baffle inside the tank, the movement in the tank is broken down into two areas:
with
,
. The description of the geometry of the baffle for the experimental study (
Figure 4b,c) is found in the patent, which is referenced within the paper at the beginning of
Section 2.
The potential
check the Laplace equation with the shape (
16) for
and (
20) for
in both areas.
Taking into account the initial speed
and the volume of liquid in the tank, one obtains an average value for the mass forces
, which will be used in the boundary conditions. According to the experimental approach and data, see [
20], below are presented the values for the forces associated to the initial speed
.
The data from
Table 1 show the values for the forces,
, associated with different initial speeds,
(10 km/h, 30 km/h, and 50 km/h) for three different volumes (15 L, 25 L, and 35 L) and corresponding masses (12.5 kg, 20.9 kg, and 29.2 kg) of a liquid. The forces are consistent across different speeds for the same volume and mass. The data show that the force decreases with increasing volume and mass of the liquid and that the force increases with increasing initial speed.
The boundary conditions on the
side walls are:
and on the
side walls are
also, on the floor of the tank, the condition imposed is:
The first condition in (
39) and the last condition in (
40) expressed for
express the condition on the wall of the tank, in which case the fluid will have the velocity of the tank described by
. On the left side of the baffle, the mass forces are considered identically distributed on the baffle using
.
Using the inertia coefficient C and the drag coefficient
described through the porosity of the breaker (see [
5]) and the discharge coefficient
, the jump condition on the sides of the breaker is:
and C is negligible if the thickness of the wave breaker is neglected.
On the other hand, the condition of the speed continuity at the level of
expressing that the speed is continuous when passing from the level
to
. For
, the liquid is without a wave breaker and the speed solution is known at the free surface
, in each domain (
and
) determined by the separation of the baffle:
where
,
being the potential solution of the form (
20) for the problem of the motion without a breaker.
According to the previously determined solution, we find that:
where
and for any
, we have
(see [
4]).
Additionally, the hydrostatic pressure and free surface can be described by:
The solutions of the potential function in the two areas are:
with
, where
has solution type (
21),
,
is a fundamental solution that verifies:
For the functions
in the
domain and
in the
domain, we have obtained for
,
the solutions
when
and
when
, for
.
For
and denoting
, the functions
and
have the shape
where
.
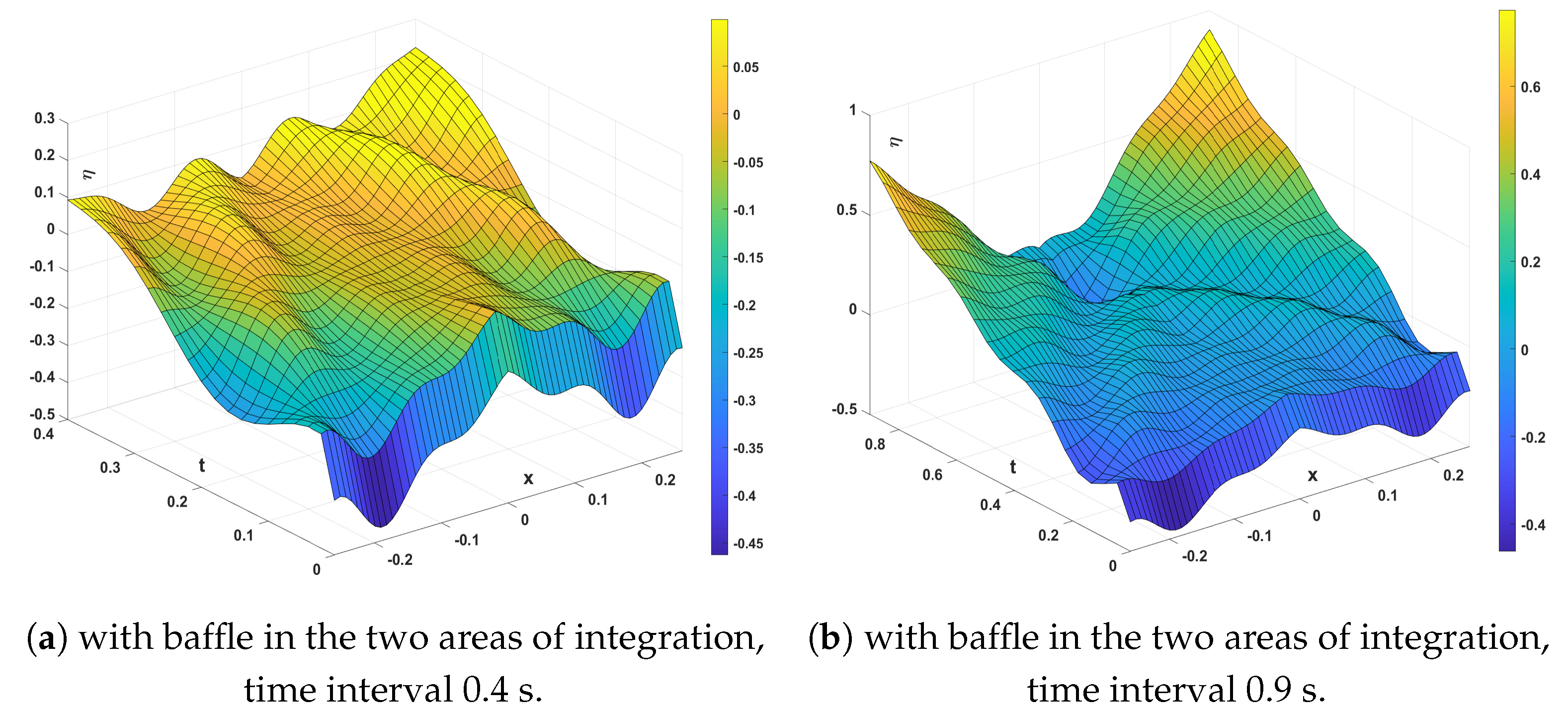
The free surface, depicted in
Figure 5 for
s and
s, is determined by the relationship
for
, with
and
the free surfaces in the two domains
and
.
According with the method of fundamental solutions used in (
20), we obtain:
where
Additionally, for
, we have
and for
, one obtains
The relationships developed, (
57) and (
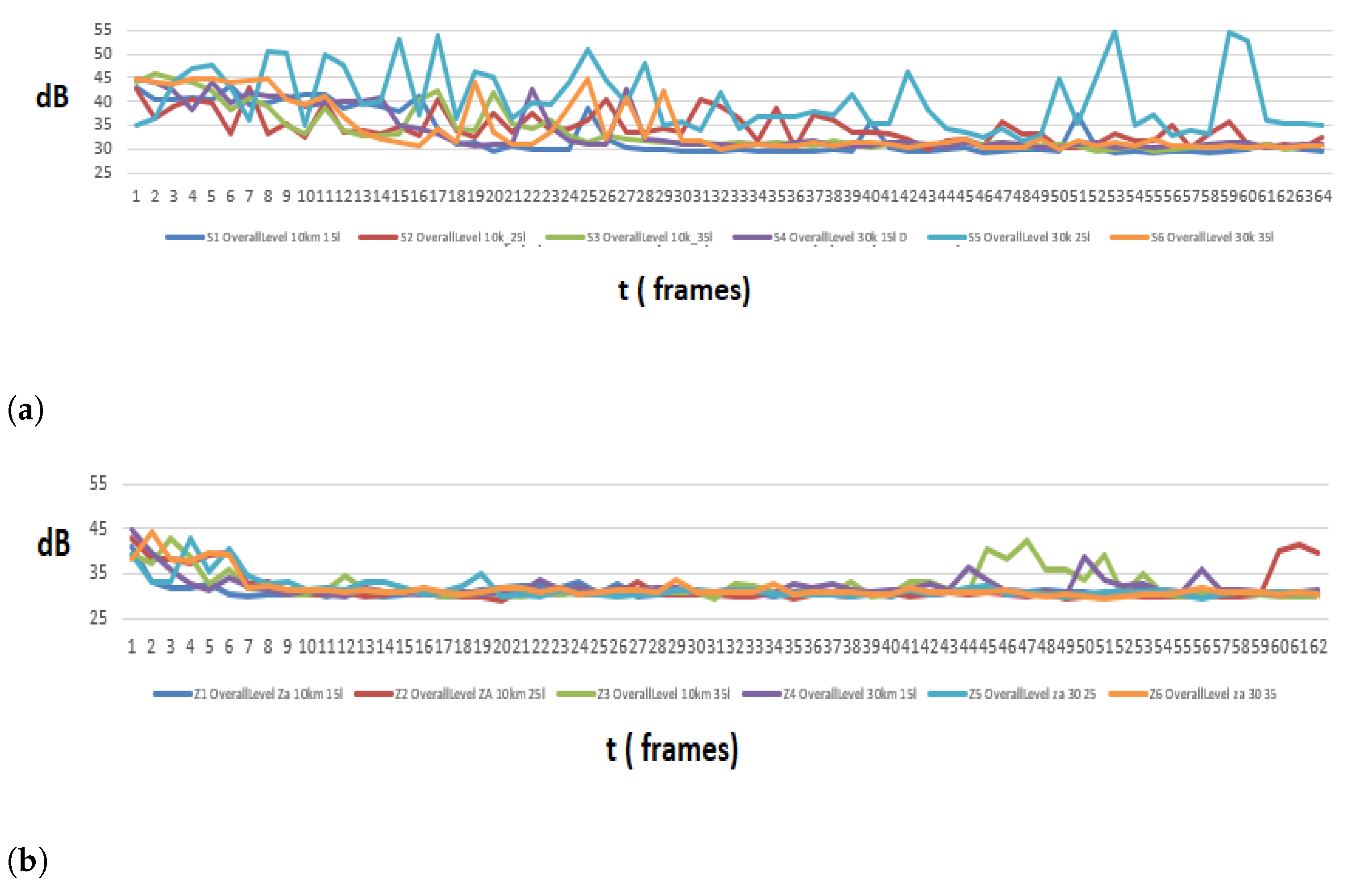
58), indicate a dependency of the height and number of waves created within a vehicle tank on the presence or absence of a wave breaker, its geometry also being important. The same dependency was also determined experimentally, following the measurement of the noise level recorded under different running conditions, according to the data in
Table 2.
In [
24,
25], a correlation between the sound intensity due to sloshing and the pressure fluctuation dp/dt has been found, and connecting to (
49),
, the variation in time and space was depicted in
Figure 5.
According to
Figure 5, when a tank has a wave breaker, a single large wave is observed and the liquid tends to move towards the sides. Theoretically, by incorporating a wave breaker into a tank, the noise caused by the sloshing phenomenon is reduced due to the lack of waves. By analysing
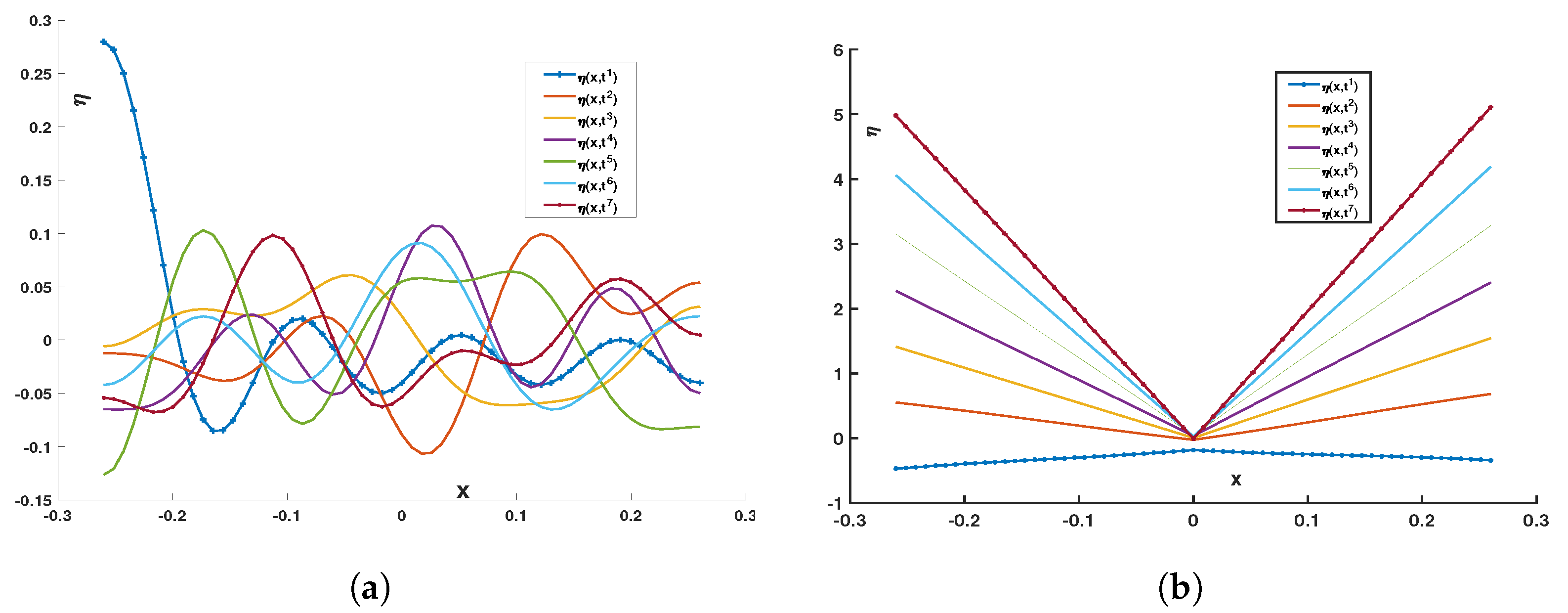
Figure 6 and
Figure 7, it can be seen that the free surface behaves differently, with a significant reduction in the number of waves in the case of a wave breaker being integrated. This results in a reduction in the discomfort caused by the sloshing phenomenon. Negative values on the X-axis are a result of the chosen axis system, where −0.25 m and +0.25 m represent the tank walls.
The reference level is set to the level of the liquid at rest (H level, as seen in
Figure 1b and
Figure 4b) and positive and negative variations from this level are observed after braking.
As can be seen in
Figure 7a, there are ripples on the free surface, these being unfractionated surfaces (the gradient on the curves does not change its convexity), which are smoother, and thus no noise is generated by the collision of small waves. The greater the distance between two peaks of the amplitude, the flatter the free surface is, and thus non-noisy.
In the considered model, the study is carried out in the centre of the tank, not taking into account that the vehicle tanks have an upper limit, given by the tank ceiling. For future research, it is an advanced study taking into account the model’s upper limitation, considering that when the wave returns, the potential movement becomes turbulent.
All the graphics in the paper were created by the authors, and the computations were made using MatlabR2022b codes.
5. Conclusions and Future Researches
For people travelling in a car with a stop-start system, the slosh noise caused by the movement of fuel in the tank is considered to be an annoyance. The intensity of this phenomenon increases during braking and accelerating.
The paper studies the movement of fuel in the tank, analysing both the waves and the sound generated during the accelerating and braking of the car. The associated phenomenon, called the slosh noise effect, is studied through analytical and approximate models. The analytical mathematical model of the free surface of the fluid during movement includes the determination of the potential function and the velocity components, in two different variants, with and without wave breakers. The model of the fuel movement in a tank containing wave breakers (baffles) was developed by dividing the fuel volume into two regions, separated by the baffle surfaces and defining both boundary and jump conditions on the baffle surfaces.
Based on the analytical models (for tanks with and without baffles), graphical representations of the free surface movement were made in both variants, with and without baffles. Comparing the graphs of the waves in each case, it is observed that the introduction of the baffles reduces the phenomenon by half (see
Section 4). Thus, it is found that the amplitude of the movement of the free surface of the fluid in the case of the implementation of a wave breaker solution of the type of baffle is reduced by half compared to the movement of the free surface of the fluid contained in a fuel tank that does not present anti-blinking technical solutions.
The theme represents the creation of a new baffle design for fuel tanks in the automotive industry that can be adapted to already existing fuel tanks without modifying the original design. The baffle is needed to decrease noise generated by the fuel waves inside the fuel tank. Its effect is shown in
Figure 8, confirmed by physical experimental tests [
20].
The comparative analysis by the amplitude and free surface leads to new future research directions on the correspondence between free surface movement and the noise level generated through the module of the velocity, and the nondimensional simplified form of the Bernoulli integral for incompressible flows:
with
being the ratio between specific heat at constant pressure and specific heat at constant volume [
1,
26]. The Bernoulli integral allows us to make the connection between the velocity of the fuel and the level of the sound due to the waves in the tank. As one observes from the previous formula, for a smaller module of the velocity
results in a larger value for the sound speed and also in a larger value of the velocity module when the wave breaker is introduced, meaning
, then the speed sound becomes smaller.
According with our notations,
and
with
, is the velocity corresponding to the two domains
and
(see
Section 4). For
and any
, we have
and also for
and any
, the velocity components are
For future studies, we aim to analyse the energy behaviour of the system through potential energy defined in (
12) and kinetic energy defined in (
13) that, for the case with the breaker solution implemented, becomes
and compare the two solutions from this point of view.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}