

Snail: An Eco-Friendly Autonomous Steam Mopping Robot for Cleaning and Disinfection of Floors
 , , , and
, , , and
Abstract
:1. Introduction
- Develop an autonomous mopping robot with steam as a cleaning payload for cleaning and disinfecting typical indoor floors as a safe and eco-friendly solution;
- Design a steam mopping unit with a low power-rated compact steam generation unit and maximum mopping pad size to reduce energy consumption and increase area coverage while keeping the disinfection parameters;
- Develop a novel motion controller design for smooth maneuverability to mitigate the friction forces, especially while mopping rough floors such as carpets;
- Validate the uniform steam dissipation, maintaining the dissipation temperature, maneuverability following a given trajectory, and cleaning efficiency by testing with a zig-zagging cleaning pattern for real-time application, especially where hygiene is critical.
2. Design Methodology of the Autonomous Steam Mopping Robot (Snail)
2.1. Mechanical System Design
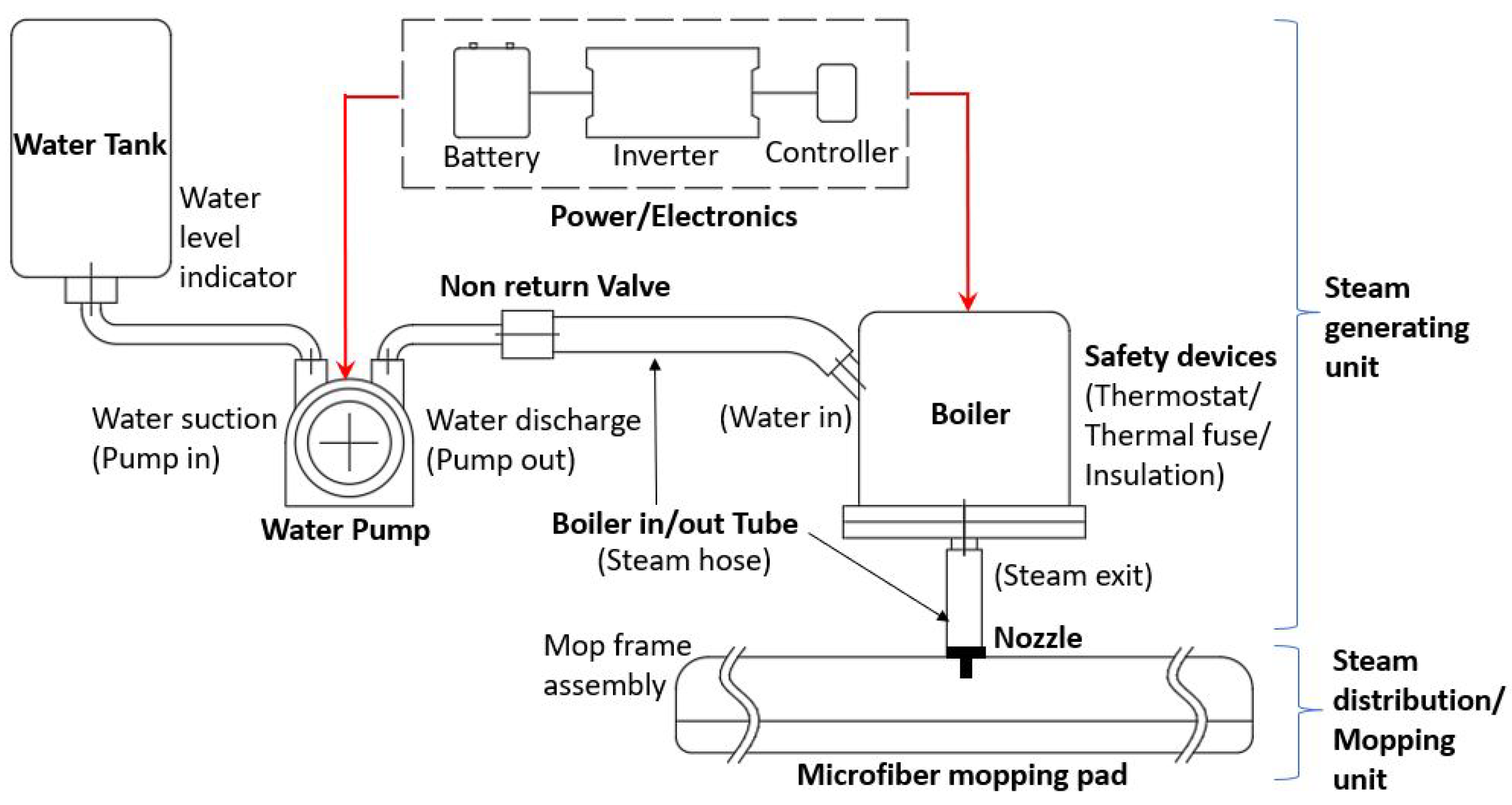
2.1.1. Steam Generation Unit
2.1.2. Steam Distribution Unit
2.2. System Architecture Design
2.2.1. Hardware Architecture
2.2.2. Software Architecture
2.3. Control System Design
3. Experiments, Simulations, and Discussion
3.1. Evaluation of the Steam Temperature and Dissipation
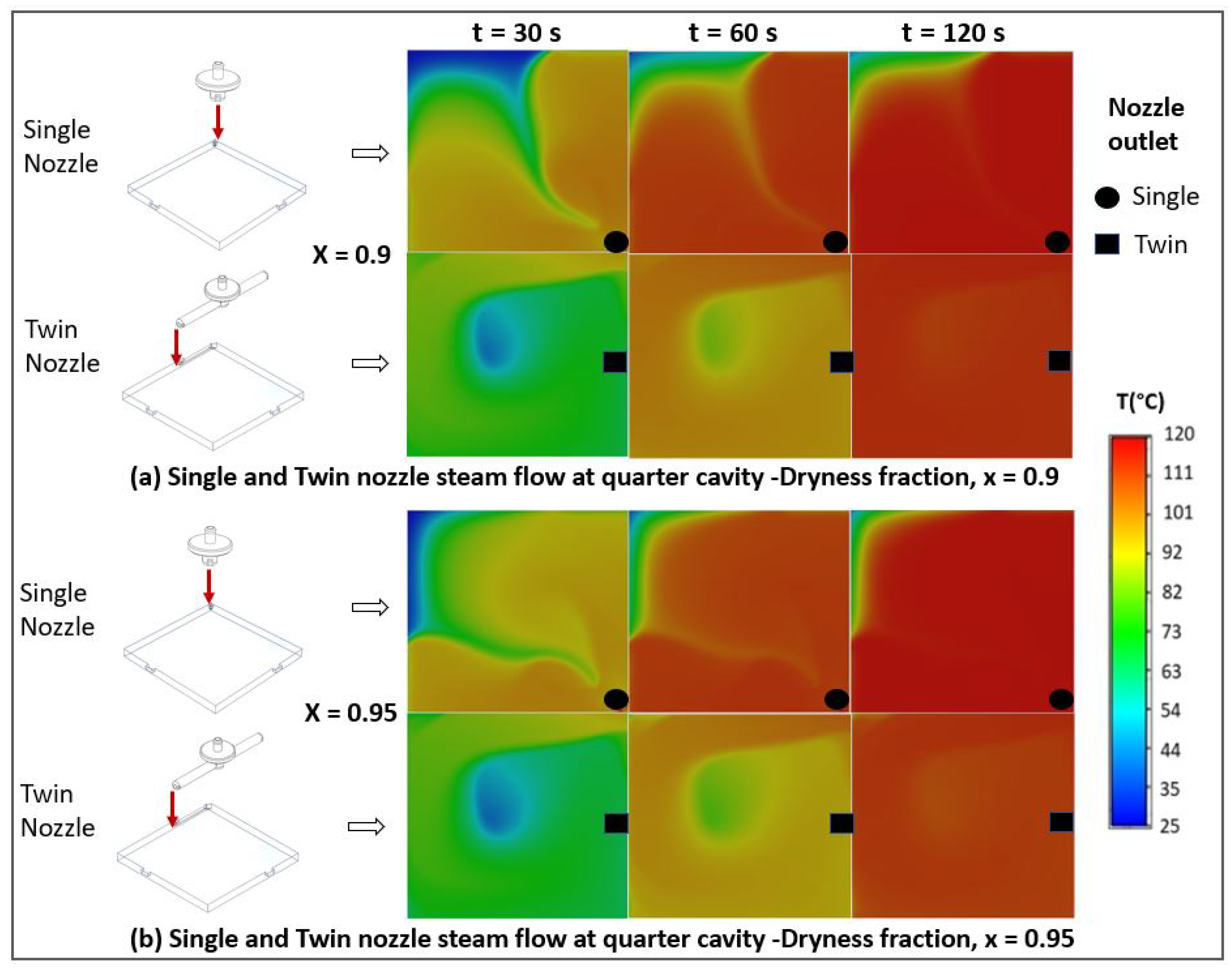
3.1.1. Steam Flow Simulation
3.1.2. Real-Time Steam Flow Test
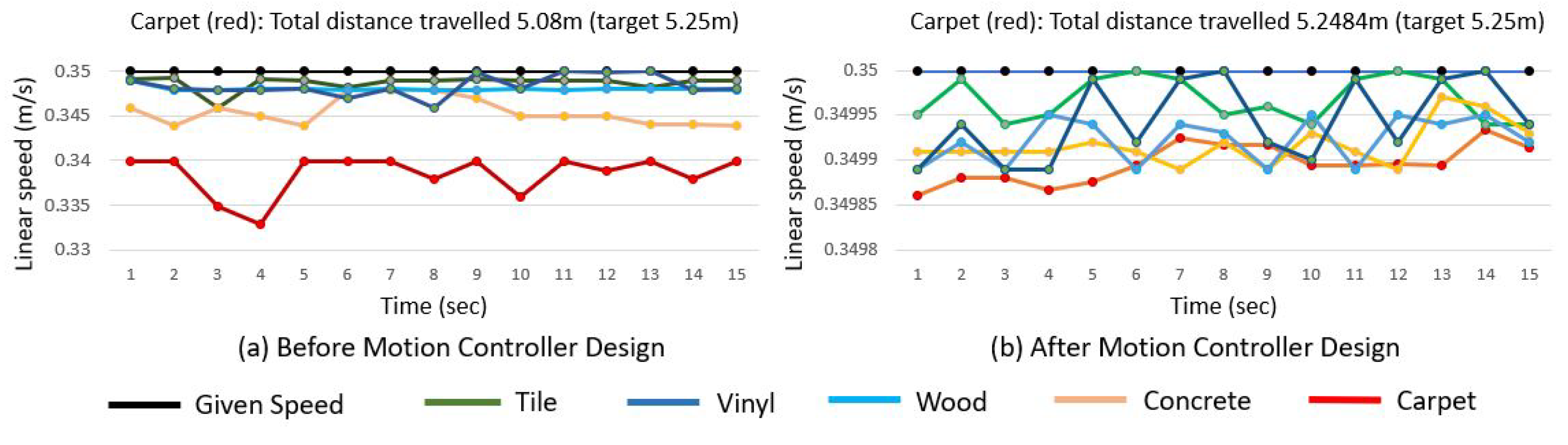
3.2. Motion Controller Performance Analysis and Comparison
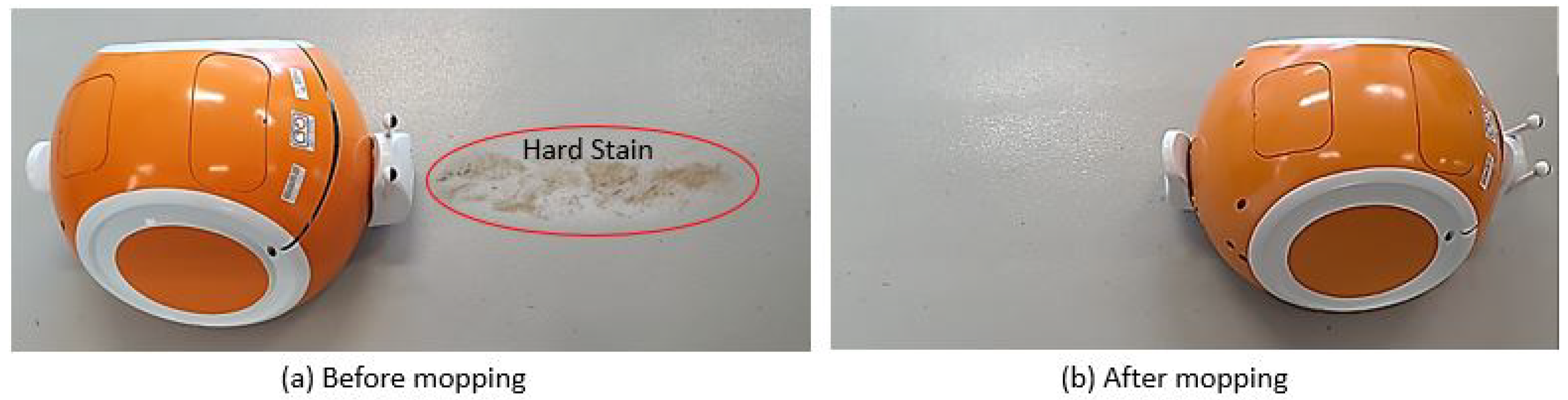
3.3. Cleaning Efficiency of Steam Mopping Robot
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wordsworth, P.; Lee, R. Lee’s Building Maintenance Management; Blackwell Science: Princeton, NJ, USA, 2001. [Google Scholar]
- Ryu, B.H.; Cho, Y.; Cho, O.H.; Hong, S.I.; Kim, S.; Lee, S. Environmental contamination of SARS-CoV-2 during the COVID-19 outbreak in South Korea. Am. J. Infect. Control 2020, 48, 875–879. [Google Scholar] [CrossRef] [PubMed]
- Wolkoff, P.; Schneider, T.; Kildesø, J.; Degerth, R.; Jaroszewski, M.; Schunk, H. Risk in cleaning: Chemical and physical exposure. Sci. Total Environ. 1998, 215, 135–156. [Google Scholar] [CrossRef] [PubMed]
- Advanced Biotechnologies INC. Is UV Sterilisation Effective for Viruses and Bacteria? Available online: https://abionline.com/is-uv-sterilization-effective-for-viruses-and-bacteria (accessed on 14 May 2021).
- Houser, K.W. Ten Facts about UV Radiation and COVID-19; Taylor & Francis: Abingdon, UK, 2020. [Google Scholar]
- Wang, X.V.; Wang, L. A literature survey of the robotic technologies during the COVID-19 pandemic. J. Manuf. Syst. 2021, 60, 823–836. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.K.; Cui, C.; Seok, H.; Bae, J.Y.; Jeon, J.H.; Lee, G.E.; Choi, W.S.; Park, M.S.; Park, D.W. Feasibility of ultraviolet light-emitting diode irradiation robot for terminal decontamination of coronavirus disease 2019 (COVID-19) patient rooms. Infect. Control. Hosp. Epidemiol. 2021, 43, 232–237. [Google Scholar] [CrossRef] [PubMed]
- Murphy, R.R.; Gandudi, V.B.M.; Adams, J. Applications of robots for COVID-19 response. arXiv 2020, arXiv:2008.06976. [Google Scholar]
- Song, L.; Wu, J.; Xi, C. Biofilms on environmental surfaces: Evaluation of the disinfection efficacy of a novel steam vapor system. Am. J. Infect. Control 2012, 40, 926–930. [Google Scholar] [CrossRef]
- Morrone, G.; De Lorenzi, S.; Barrai, I.; Mosca, B.; Finzi, G.; Cugini, P. Comparing different methods of sanitization. in operating theatres: Use of disinfectant detergents or of steam? In Proceedings of the 34th National Congress Anmdo, Catania, Italy, 18 September 2008. [Google Scholar]
- Bradbeer, S.J.; Coughlan, N.E.; Cuthbert, R.N.; Crane, K.; Dick, J.T.; Caffrey, J.M.; Lucy, F.E.; Renals, T.; Davis, E.; Warren, D.A.; et al. The effectiveness of disinfectant and steam exposure treatments to prevent the spread of the highly invasive killer shrimp, Dikerogammarus villosus. Sci. Rep. 2020, 10, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Bayzi Corporation. Steam Cleaning Studies. Available online: https://bayzi.com/steam-cleaning-studies (accessed on 15 February 2021).
- Gillespie, E.; Williams, N.; Sloane, T.; Wright, L.; Kotsanas, D.; Stuart, R.L. Using microfiber and steam technology to improve cleaning outcomes in an intensive care unit. Am. J. Infect. Control 2015, 43, 177–179. [Google Scholar] [CrossRef]
- Abernethy, M.; Gillespie, E.; Snook, K.; Stuart, R.L. Microfiber and steam for environmental cleaning during an outbreak. Am. J. Infect. Control 2013, 41, 1134–1135. [Google Scholar] [CrossRef]
- Gillespie, E.; Wilson, J.; Lovegrove, A.; Scott, C.; Abernethy, M.; Kotsanas, D.; Stuart, R.L. Environment cleaning without chemicals in clinical settings. Am. J. Infect. Control 2013, 41, 461–463. [Google Scholar] [CrossRef]
- Colloff, M.; Taylor, C.; Merrett, T. The use ofdomestic steam cleaning for the control of house dust mites. Clin. Exp. Allergy 1995, 25, 1061–1066. [Google Scholar] [CrossRef] [PubMed]
- De Lorenzi, S.; Salvatorelli, G.; Finzi, G.; Cugini, P. Use of a steam generator for disinfection of hospital ward room surfaces. Br. Microbiol. Res. J. 2012, 2, 228. [Google Scholar] [CrossRef]
- Nilfisk, Ltd. Why Steam Is the Best Solution for Cleaning When Hygiene Is Critical. Available online: https://new.nilfisk.com/global/articles/steam-solution-when-hygiene-is-critical (accessed on 10 January 2021).
- Rosenzweig, M.; Ognjen, V. Steam Mop. US Patent 8,205,293, 26 June 2012. [Google Scholar]
- Shaw, R.R. Steam Mop. US Patent 6,584,990, 1 July 2003. [Google Scholar]
- kagoo.co.uk. Compare the Best Steam Cleaners. Available online: https://kagoo.co.uk/steam-cleaners (accessed on 10 January 2021).
- digitec.ch. Steam Cleaners. Available online: https://www.digitec.ch/en/s1/producttype/steam-cleaners-126 (accessed on 10 January 2021).
- Chan, J. The Best Affordable Robot Vacuums of 2021. Available online: https://www.reviewed.com/vacuums/best-right-now/best-affordable-robot-vacuums (accessed on 5 April 2021).
- Alex Colon, A.M. The Best Robot Mops for 2021. Available online: https://www.tomsguide.com/best-picks/best-robot-mops (accessed on 5 April 2021).
- LionsBot International Pte Ltd. LionsBot—Robots that Give Cleaners Superpowers. Available online: https://www.lionsbot.com/ (accessed on 15 August 2022).
- Global Robotics Platform. Global Robotics—Cleaning Robots. Available online: https://www.allrobotsin.com/cleaning-robots/ (accessed on 15 August 2022).
- Prabakaran, V.; Elara, M.R.; Pathmakumar, T.; Nansai, S. Floor cleaning robot with reconfigurable mechanism. Autom. Constr. 2018, 91, 155–165. [Google Scholar] [CrossRef]
- Tun, T.T.; Huang, L.; Mohan, R.E.; Matthew, S.G.H. Four-wheel steering and driving mechanism for a reconfigurable floor cleaning robot. Autom. Constr. 2019, 106, 102796. [Google Scholar] [CrossRef]
- Ilyas, M.; Yuyao, S.; Mohan, R.E.; Devarassu, M.; Kalimuthu, M. Design of sTetro: A modular, reconfigurable, and autonomous staircase cleaning robot. J. Sens. 2018, 2018, 8190802. [Google Scholar] [CrossRef]
- Ramalingam, B.; Elara Mohan, R.; Balakrishnan, S.; Elangovan, K.; Félix Gómez, B.; Pathmakumar, T.; Devarassu, M.; Mohan Rayaguru, M.; Baskar, C. sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot. Sensors 2021, 21, 6279. [Google Scholar] [CrossRef]
- Vega-Heredia, M.; Mohan, R.E.; Wen, T.Y.; Siti’Aisyah, J.; Vengadesh, A.; Ghanta, S.; Vinu, S. Design and modelling of a modular window cleaning robot. Autom. Constr. 2019, 103, 268–278. [Google Scholar] [CrossRef]
- Muthugala, M.; Vega-Heredia, M.; Mohan, R.E.; Vishaal, S.R. Design and control of a wall cleaning robot with adhesion-awareness. Symmetry 2020, 12, 122. [Google Scholar] [CrossRef] [Green Version]
- Sang, A.W.Y.; Moo, C.G.; Samarakoon, P.; Bhagya, S.; Muthugala, M.; Elara, M.R. Design of a Reconfigurable Wall Disinfection Robot. Sensors 2021, 21, 6096. [Google Scholar] [CrossRef]
- Ramalingam, B.; Yin, J.; Rajesh Elara, M.; Tamilselvam, Y.K.; Mohan Rayguru, M.; Muthugala, M.; Félix Gómez, B. A human support robot for the cleaning and maintenance of door handles using a deep-learning framework. Sensors 2020, 20, 3543. [Google Scholar] [CrossRef]
- Yin, J.; Apuroop, K.G.S.; Tamilselvam, Y.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V. Table cleaning task by human support robot using deep learning technique. Sensors 2020, 20, 1698. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Griffith, C.; Moore, G. An evaluation of the cleaning properties of a microfibre cloth. Am. J. Infect. Control 2005, 33, e35–e36. [Google Scholar] [CrossRef]
- Wren, M.; Rollins, M.; Jeanes, A.; Hall, T.; Coen, P.; Gant, V. Removing bacteria from hospital surfaces: A laboratory comparison of ultramicrofibre and standard cloths. J. Hosp. Infect. 2008, 70, 265–271. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Floor Surface | PID | Proposed |
|---|---|---|
| Concrete | 0.021 | 0.015 (+34%) |
| Carpet | 0.029 | 0.016 (+76%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pookkuttath, S.; Elara, M.R.; Mohan Rayguru, M.; Saldi, Z.S.; Sivanantham, V.; Ramalingam, B. Snail: An Eco-Friendly Autonomous Steam Mopping Robot for Cleaning and Disinfection of Floors. Mathematics 2023, 11, 1086. https://doi.org/10.3390/math11051086
Pookkuttath S, Elara MR, Mohan Rayguru M, Saldi ZS, Sivanantham V, Ramalingam B. Snail: An Eco-Friendly Autonomous Steam Mopping Robot for Cleaning and Disinfection of Floors. Mathematics. 2023; 11(5):1086. https://doi.org/10.3390/math11051086
Chicago/Turabian StylePookkuttath, Sathian, Mohan Rajesh Elara, Madan Mohan Rayguru, Zaki Saptari Saldi, Vinu Sivanantham, and Balakrishnan Ramalingam. 2023. "Snail: An Eco-Friendly Autonomous Steam Mopping Robot for Cleaning and Disinfection of Floors" Mathematics 11, no. 5: 1086. https://doi.org/10.3390/math11051086