
Image Hiding in Stochastic Geometric Moiré Gratings



Abstract
:1. Introduction
2. Preliminaries
2.1. The Wada Index for the Evaluation of the Grating Complexity
- s—The length of the 1D observation window measured in the number of pixels; .
- c—The number of different grayscale levels in the 1D observation window; .
- , —The number of k-th color pixels in the 1D observation window.
- , —The discrete probability of the k-th color in the 1D observation window.
- The indicator function is equal to 1 if the number of grayscale levels in the 1D observation window is greater than or equal to 2:
- The indicator function is equal to 1 if the number of grayscale levels in the 1D observation window is greater than or equal to 3:
- The Shannon entropy of different grayscale levels in the 1D observation window:
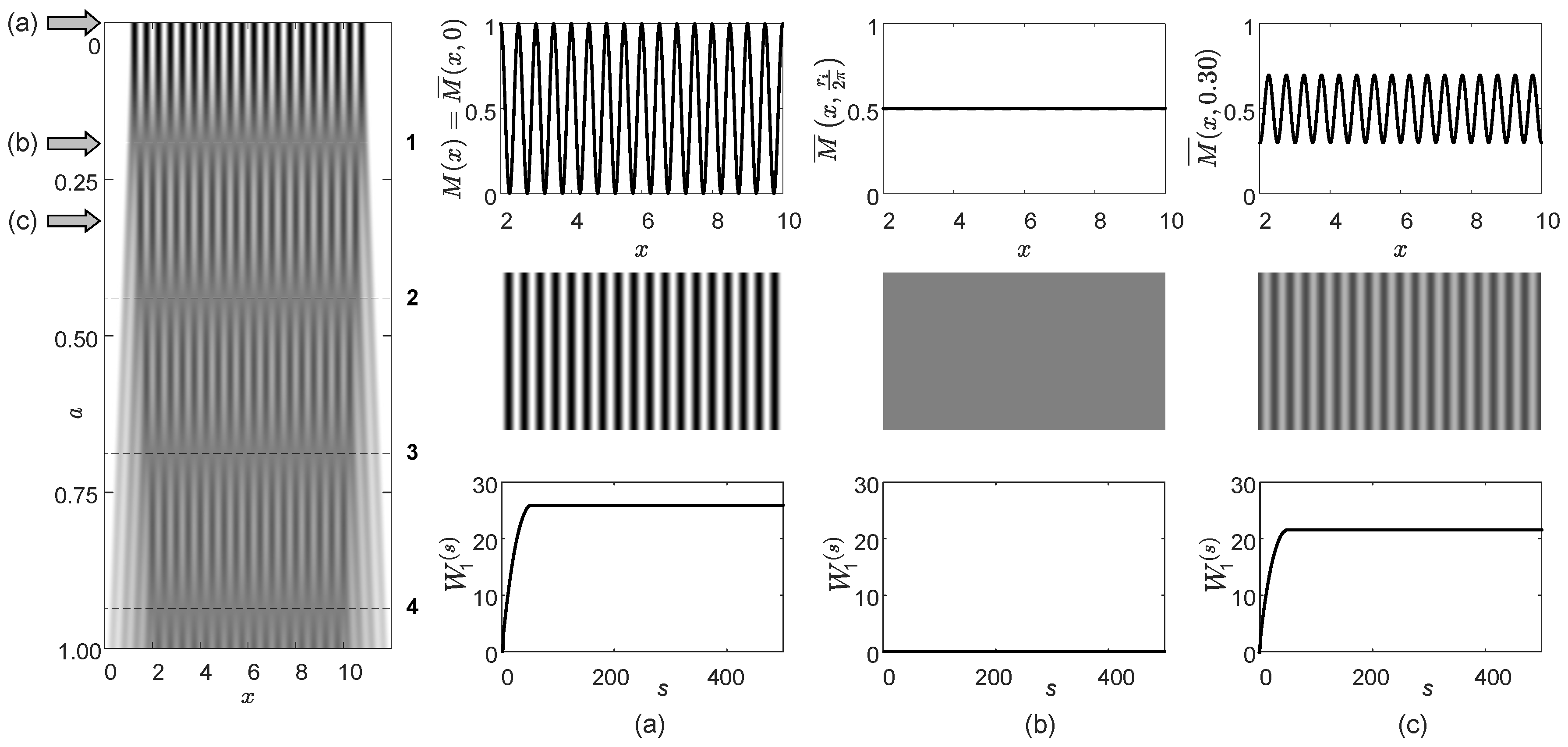
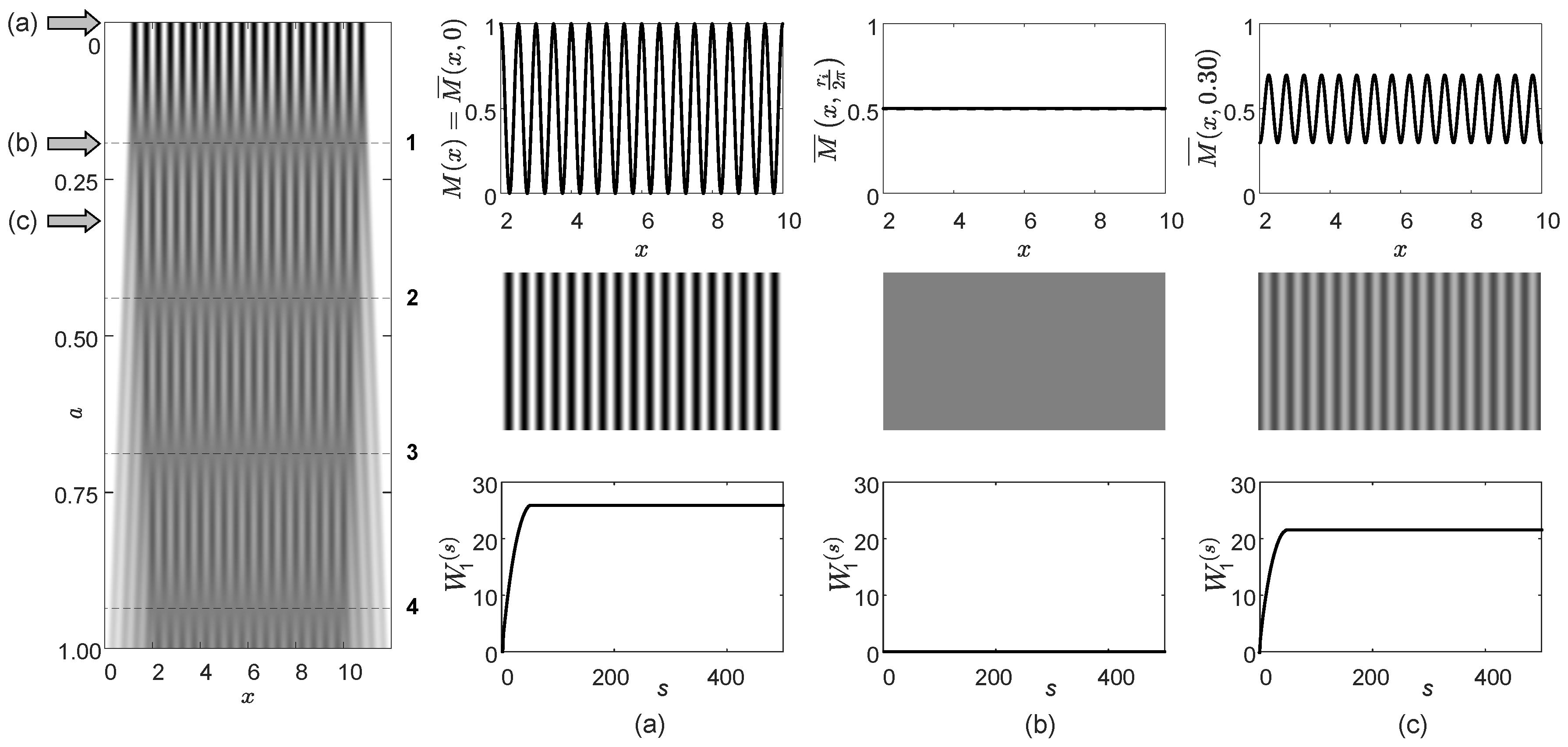
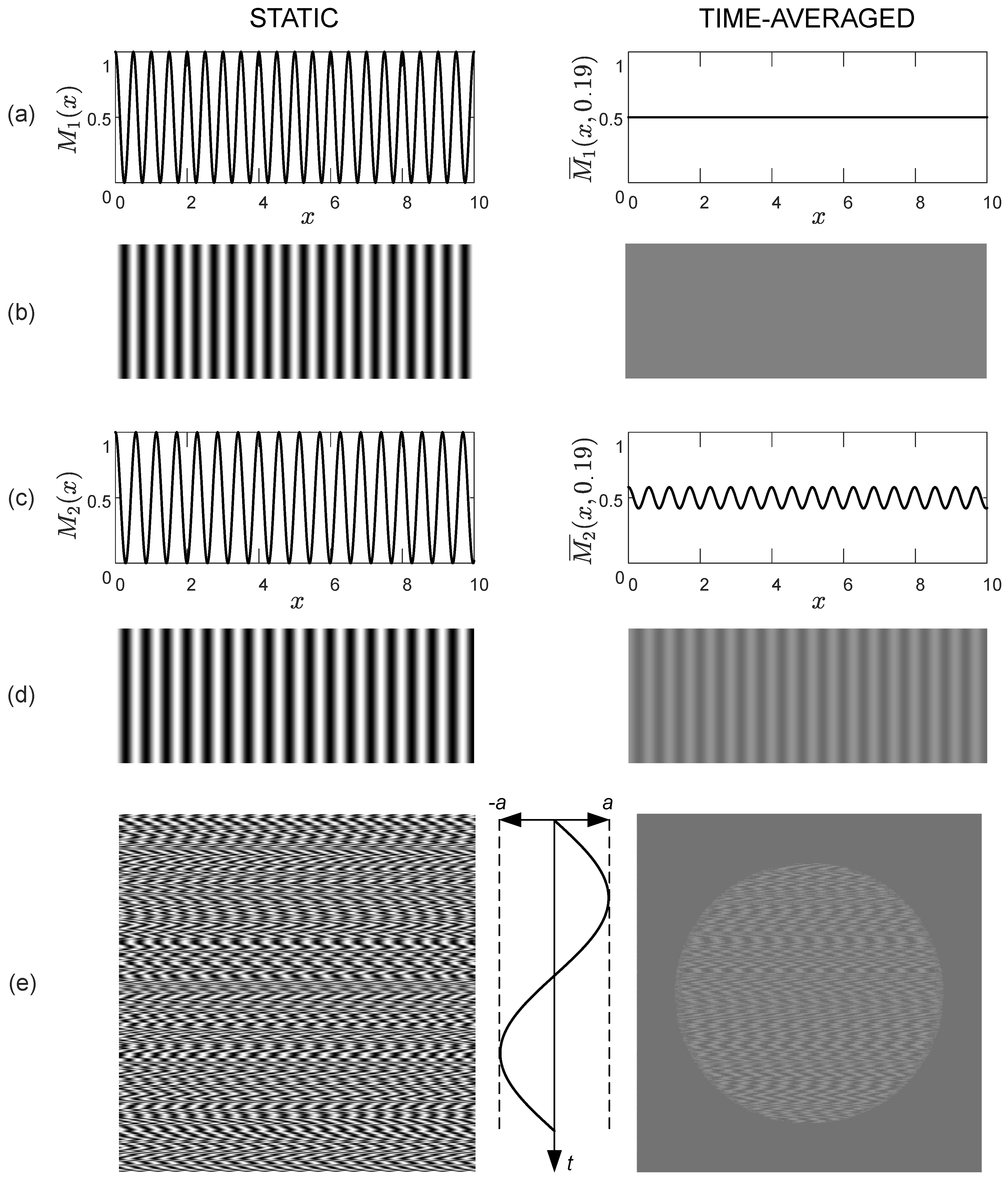
2.2. Time-Averaged Geometric Moiré: Harmonic Grating
2.3. Image Hiding in Harmonic Gratings
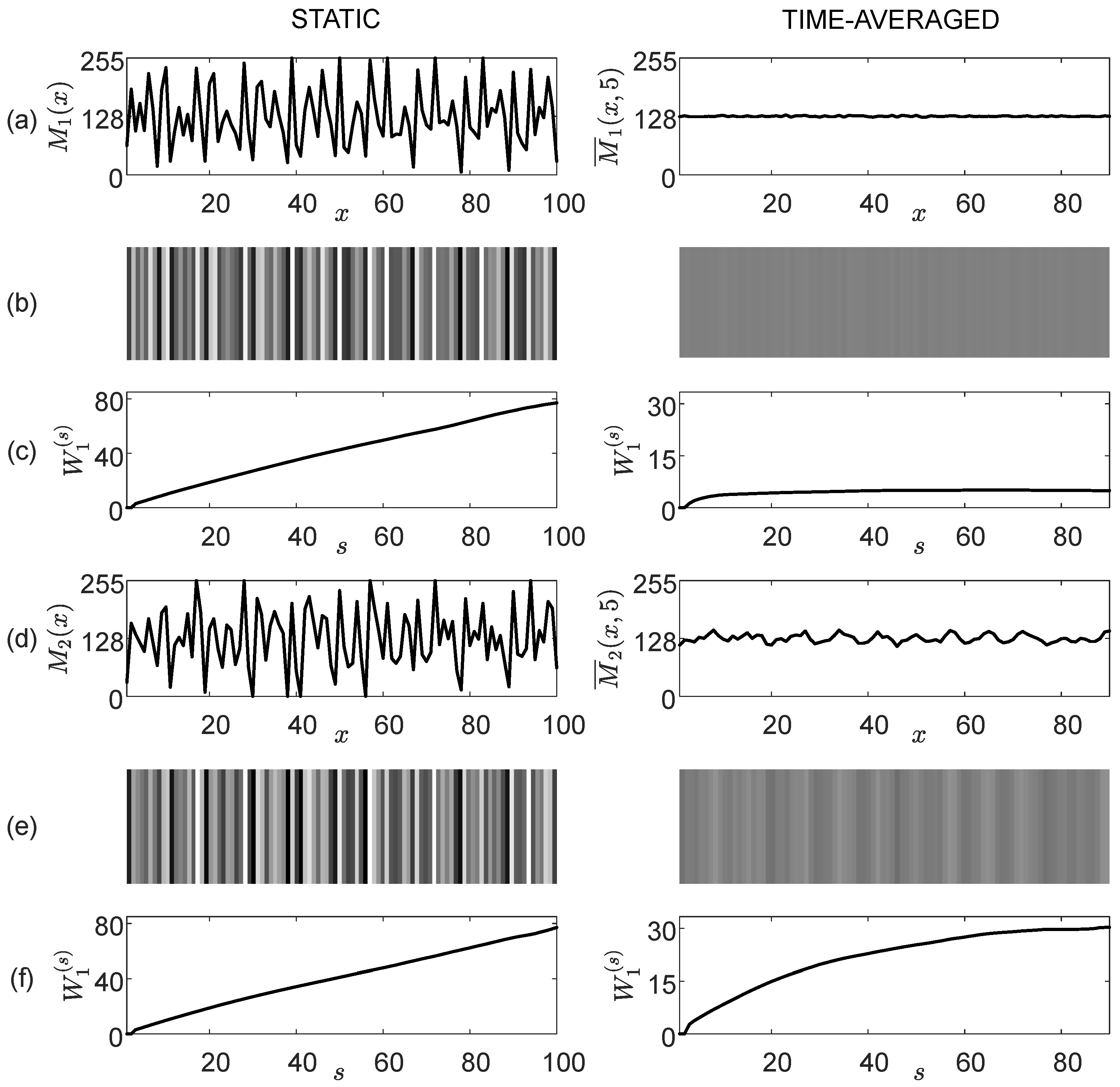
2.4. Time-Averaged Random Moiré Grating
3. Dynamic Visual Cryptography Based on Stochastic Gratings
3.1. One-Dimensional Stochastic Gratings for Image Hiding Applications
3.2. Requirements for Stochastic Gratings
3.2.1. Requirements for
- The standard deviation of the stationary grating is as high as possible. This requirement is necessary to ensure that the brightness range of pixels used to construct the grating is as large as possible.
- The mean and standard deviation are approximately the same in any segment of the stationary grating . This requirement is necessary to ensure the consistency of the grating.
- The difference between the brightness of each pixel of the time-averaged grating and the value 127.5 is as small as possible. This requirement ensures that the time-averaged image of the stochastic grating closely resembles a plain gray image.
3.2.2. Requirements for
- The stationary grating should be as similar as possible to .
- The mean of the stationary grating is approximately the same as the mean of . Otherwise, the secret will be clearly visible in the static cover image.
- The standard deviation of the stationary grating is approximately the same as the standard deviation of . This requirement is also crucial for hiding the secret in the cover image.
- The Wada index of the stationary grating is approximately the same as the Wada index of . This requirement defines the similarity of the secret and the background in multiple scales of the observation window.
- The standard deviation of the time-averaged grating is as high as possible. This requirement ensures that the area occupied by is not transformed into a plain gray image in the time-averaged mode.
- The mean, the standard deviation, and the Wada index are approximately the same in any segment of the time-averaged grating . This requirement ensures the consistency of the secret image in the time-averaged mode.
3.3. The Formulation of the Cost Functions
3.3.1. Notations of Statistical Characteristics
- The average brightness of the moiré grating over the entire observation interval:
- The average brightness of in the k-th segment:
- The standard deviation of the brightness of over the entire observation interval:
- The standard deviation of the brightness of in the k-th segment:
- The average brightness of over the entire observation interval:
- The average brightness of in the k-th segment:
- The standard deviation of the brightness of over the entire observation interval:
- The standard deviation of the brightness of in the k-th segment:
- The fourth central moment of the brightness of over the entire observation interval:
- The maximal Wada index of over the entire observation interval () is denoted as (Equation (3)).
- The maximal Wada index of in the k-th segment () is denoted as .
3.3.2. The Formulation of the Cost Function
3.3.3. The Formulation of the Cost Function
3.4. Evolutionary Algorithms for the Optimization of Stochastic Gratings for Image Hiding Applications
3.5. The DVC Scheme Based on Stochastic Moiré Gratings
3.6. The Comparison between the Proposed Technique and Classical DVC Schemes
4. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kobayashi, A. Handbook on Experimental Mechanics; VCH: New York, NY, USA, 1993. [Google Scholar]
- Patorski, K. Handbook of the Moiré Fringe Technique; Elsevier: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Li, X. Displacement measurement based on the moiré fringe. In Proceedings of the Seventh International Symposium on Precision Engineering Measurements and Instrumentation, Yunnan, China, 7–11 August 2011; Fan, K.C., Song, M., Lu, R.S., Eds.; International Society for Optics and Photonics. SPIE: Washington, DC, USA, 2011; Volume 8321, p. 832148. [Google Scholar] [CrossRef]
- Wang, Q.; Ri, S.; Xia, P. Wide-view and accurate deformation measurement at microscales by phase extraction of scanning moiré pattern with a spatial phase-shifting technique. Appl. Opt. 2021, 60, 1637–1645. [Google Scholar] [CrossRef] [PubMed]
- Tsai, P.H.; Chuang, Y.Y. Target-Driven Moiré Pattern Synthesis by Phase Modulation. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 1912–1919. [Google Scholar] [CrossRef] [Green Version]
- Su, Y.; Wang, Z.; An, D. Simulation of moiré pattern based on transmittance calculation of LCD metal mesh touch panel. J. Soc. Inf. Disp. 2021, 29, 620–631. [Google Scholar] [CrossRef]
- Mu noz-Rodríguez, J.A.; Rodríguez-Vera, R. Image encryption based on moiré pattern performed by computational algorithms. Opt. Commun. 2004, 236, 295–301. [Google Scholar] [CrossRef]
- Ragulskis, M.; Aleksa, A.; Saunoriene, L. Improved algorithm for image encryption based on stochastic geometric moiré and its application. Opt. Commun. 2007, 273, 370–378. [Google Scholar] [CrossRef]
- Ragulskis, M.; Aleksa, A. Image hiding based on time-averaging moiré. Opt. Commun. 2009, 282, 2752–2759. [Google Scholar] [CrossRef]
- Naor, M.; Shamir, A. Visual cryptography. In Proceedings of the Advances in Cryptology–EUROCRYPT’94, Perugia, Italy, 9–12 May 1994; De Santis, A., Ed.; Springer: Berlin/Heidelberg, Germany, 1995; pp. 1–12. [Google Scholar]
- Lu, G.; Saunoriene, L.; Gelžinis, A.; Petrauskiene, V.; Ragulskis, M. Visual integration of vibrating images in time. Opt. Eng. 2018, 57, 093107. [Google Scholar] [CrossRef]
- Wu, Y.; Zhou, Y.; Saveriades, G.; Agaian, S.; Noonan, J.P.; Natarajan, P. Local Shannon entropy measure with statistical tests for image randomness. Inform. Sci. 2013, 222, 323–342. [Google Scholar] [CrossRef] [Green Version]
- Ilunga, M. Shannon entropy for measuring spatial complexity associated with mean annual runoff of tertiary catchments of the Middle Vaal basin in South Africa. Entropy 2019, 21, 366. [Google Scholar] [CrossRef] [Green Version]
- Saunoriene, L.; Ragulskis, M.; Cao, J.; Sanjuán, M.A.F. Wada index based on the weighted and truncated Shannon entropy. Nonlinear Dyn. 2021, 104, 739–751. [Google Scholar] [CrossRef]
- Ragulskis, M.; Aleksa, A.; Navickas, Z. Image hiding based on time-averaged fringes produced by non-harmonic oscillations. J. Opt. A Pure Appl. Opt. 2009, 11, 125411. [Google Scholar] [CrossRef]
- Sakyte, E.; Palivonaite, R.; Aleksa, A.; Ragulskis, M. Image hiding based on near-optimal moiré gratings. Opt. Commun. 2011, 284, 3954–3964. [Google Scholar] [CrossRef]
- Petrauskiene, V.; Palivonaite, R.; Aleksa, A.; Ragulskis, M. Dynamic visual cryptography based on chaotic oscillations. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 112–120. [Google Scholar] [CrossRef]
- Lu, G.; Saunoriene, L.; Aleksiene, S.; Ragulskis, M. Optical image hiding based on chaotic vibration of deformable moiré grating. Opt. Commun. 2018, 410, 457–467. [Google Scholar] [CrossRef]
- Weir, J.; Yan, W. A Comprehensive Study of Visual Cryptography. In Transactions on Data Hiding and Multimedia Security V; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6010, pp. 70–105. [Google Scholar] [CrossRef]
- Lin, P.Y.; Wang, R.Z.; Chang, Y.J.; Fang, W.P. Prevention of cheating in visual cryptography by using coherent patterns. Inf. Sci. 2015, 301, 61–74. [Google Scholar] [CrossRef]
- Ibrahim, D.R.; Teh, J.S.; Abdullah, R. An overview of visual cryptography techniques. Multimed. Tools Appl. 2021, 80, 31927–31952. [Google Scholar] [CrossRef]
- Ragulskis, M. Time-averaged patterns produced by stochastic moiré gratings. Comput. Graph. 2009, 33, 147–150. [Google Scholar] [CrossRef]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Kich, I.; Ameur, E.B.; Taouil, Y. CNN Auto-Encoder Network Using Dilated Inception for Image Steganography. Int. J. Fuzzy Log. Intell. Syst. 2021, 21, 358–368. [Google Scholar] [CrossRef]
- Shami, T.M.; El-Saleh, A.A.; Alswaitti, M.; Al-Tashi, Q.; Summakieh, M.A.; Mirjalili, S. Particle Swarm Optimization: A Comprehensive Survey. IEEE Access 2022, 10, 10031–10061. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95–International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Jain, M.; Saihjpal, V.; Singh, N.; Singh, S.B. An Overview of Variants and Advancements of PSO Algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar] [CrossRef]
- Eberhart, R.; Shi, Y. Comparing inertia weights and constriction factors in particle swarm optimization. In Proceedings of the 2000 Congress on Evolutionary Computation. CEC00 (Cat. No.00TH8512), La Jolla, CA, USA, 16–19 July 2000; Volume 1, pp. 84–88. [Google Scholar] [CrossRef]
- Ruiheng, L.; Qiong, Z.; Nian, Y.; Ruiyou, L.; Huaiqing, Z. Improved Hybrid Particle Swarm Optimizer with Sine-Cosine Acceleration Coefficients for Transient Electromagnetic Inversion. Curr. Bioinform. 2022, 17, 60–76. [Google Scholar] [CrossRef]
- Luo, W. Particle swarm optimization algorithm with proportional factor based on Nash equilibrium. J. Phys. Conf. Ser. 2022, 2258, 012027. [Google Scholar] [CrossRef]
- Gao, Y.; Du, W.; Yan, G. Selectively-informed particle swarm optimization. Sci. Rep. 2015, 5, 9295. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- El Dor, A.; Clerc, M.; Siarry, P. A multi-swarm PSO using charged particles in a partitioned search space for continuous optimization. Comput. Optim. Appl. 2012, 53, 271–295. [Google Scholar] [CrossRef]
- Qi, S.; Zou, J.; Yang, S.; Zheng, J. A level-based multi-strategy learning swarm optimizer for large-scale multi-objective optimization. Swarm Evol. Comput. 2022, 73, 101100. [Google Scholar] [CrossRef]
- Chrouta, J.; Fethi, F.; Zaafouri, A. A modified multi swarm particle swarm optimization algorithm using an adaptive factor selection strategy. Trans. Ins. Meas. Control 2021, 01423312211029509. [Google Scholar] [CrossRef]
- Shu, M.C.; Song, M.; Wang, Y. Parameter Selection and Performance Comparison of Particle Swarm Optimization in Sensor Networks Localization. Sensors 2017, 17, 487. [Google Scholar] [CrossRef] [Green Version]
- The USC-SIPI Image Database. Available online: https://sipi.usc.edu/database (accessed on 30 November 2022).
- Image Repository. Available online: https://links.uwaterloo.ca/Repository.html (accessed on 30 November 2022).
- Piotrowski, A.P.; Napiorkowski, J.J.; Piotrowska, A.E. Population size in Particle Swarm Optimization. Swarm Evol. Comput. 2020, 58, 100718. [Google Scholar] [CrossRef]
- Iqbal, N.; Zerguine, A.; Al-Dhahir, N. Decision Feedback Equalization Using Particle Swarm Optimization. Signal Process. 2015, 108, 1–12. [Google Scholar] [CrossRef]
- Cimato, S.; Yang, C.-N. (Eds.) Visual Cryptography and Secret Image Sharing, 1st ed.; Digital Imaging and Computer Vision; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DVC Scheme | Encoded and Decoded Images | Standard Deviation in the Background Area | Standard Deviation in the Secret Area | Difference of Standard Deviations | Robustness to Statistical Algorithms |
|---|---|---|---|---|---|
| The proposed scheme | Figure 7d | 3.17 | 7.60 | 4.43 | YES |
| Scheme A | Figure 8a | 0.92 | 12.32 | 11.4 | NO |
| Scheme B | Figure 8b | 14.71 | 18.65 | 3.94 | NO |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saunoriene, L.; Saunoris, M.; Ragulskis, M. Image Hiding in Stochastic Geometric Moiré Gratings. Mathematics 2023, 11, 1763. https://doi.org/10.3390/math11081763
Saunoriene L, Saunoris M, Ragulskis M. Image Hiding in Stochastic Geometric Moiré Gratings. Mathematics. 2023; 11(8):1763. https://doi.org/10.3390/math11081763
Chicago/Turabian StyleSaunoriene, Loreta, Marius Saunoris, and Minvydas Ragulskis. 2023. "Image Hiding in Stochastic Geometric Moiré Gratings" Mathematics 11, no. 8: 1763. https://doi.org/10.3390/math11081763
APA StyleSaunoriene, L., Saunoris, M., & Ragulskis, M. (2023). Image Hiding in Stochastic Geometric Moiré Gratings. Mathematics, 11(8), 1763. https://doi.org/10.3390/math11081763