
Risk Evaluation of Elevators Based on Fuzzy Theory and Machine Learning Algorithms
Abstract
:1. Introduction
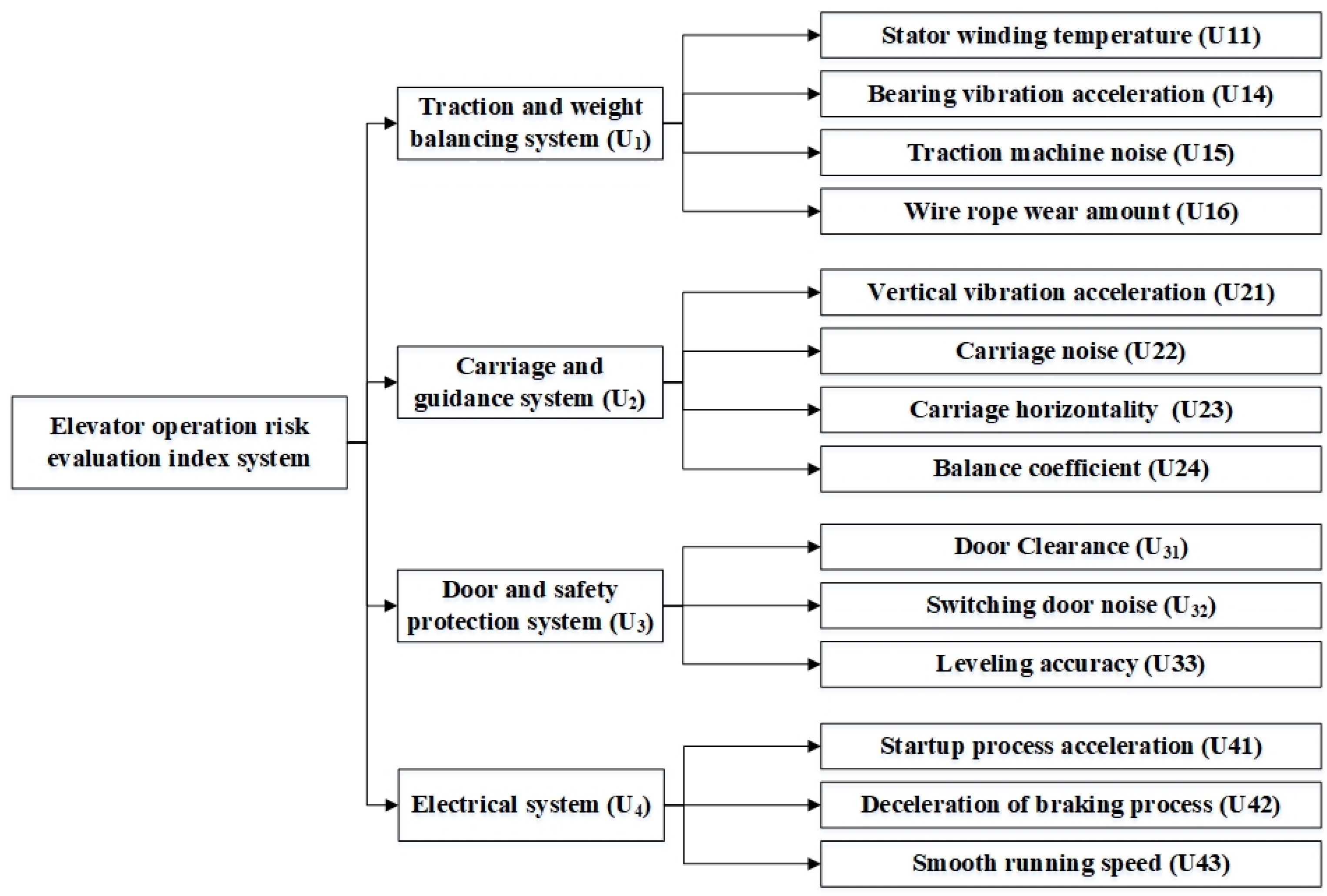
2. Elevator Operation Risk Evaluation Index System
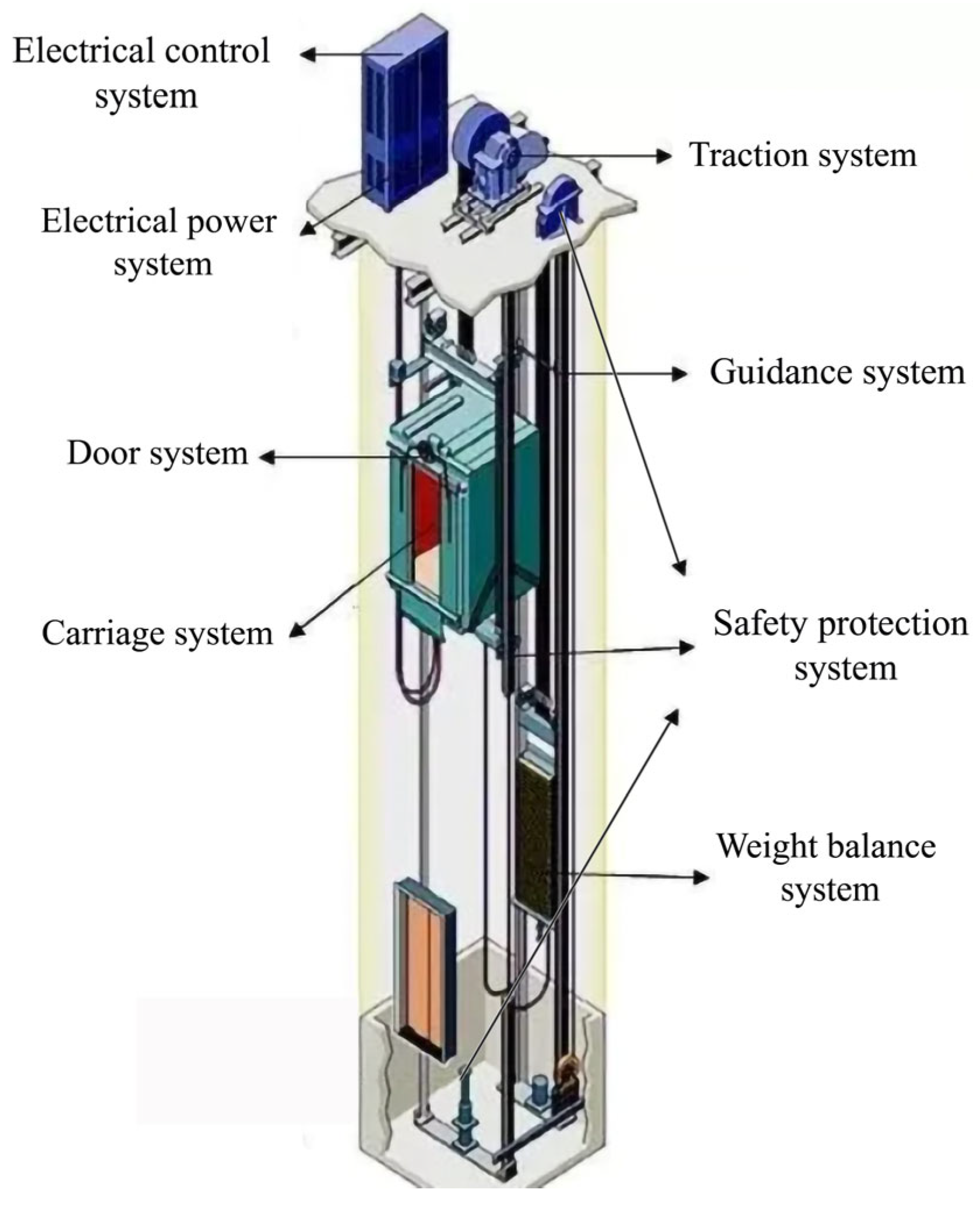
2.1. The Structure of Elevator
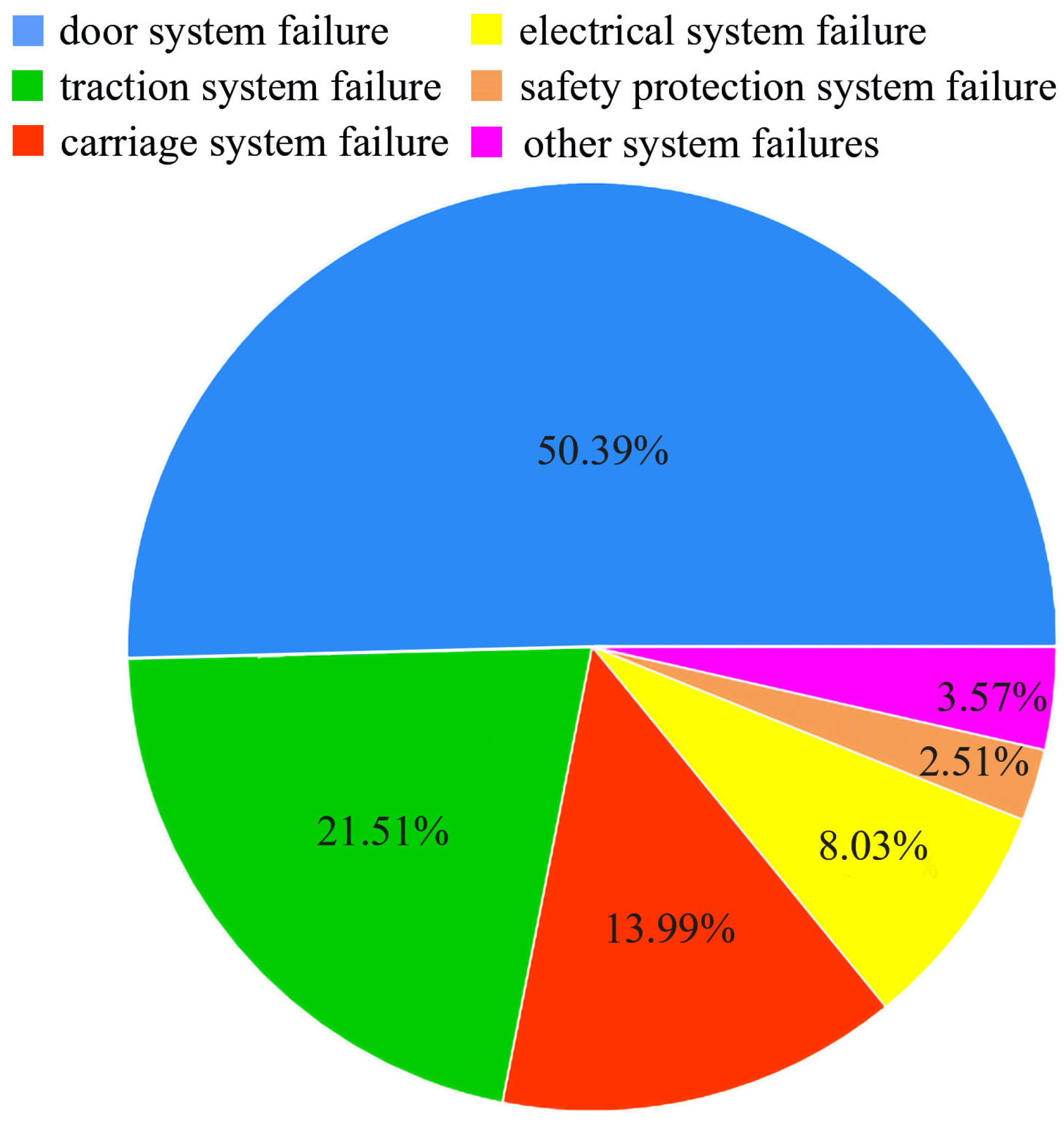
2.2. Statistical Analysis of Elevator Failures
2.3. Analysis of Elevator Failure Mechanisms
2.3.1. Traction System and Weight Balance System
- (1)
- High vibration of the traction machine. The vibration intensity is excessively high, which can easily result in the loosening of traction machine bolts. This, in turn, causes the worm shaft and motor axis to deviate from their intended alignment, leading to asynchronous motion during the traction machine’s startup or shutdown. This asynchronous motion manifests as a shaking of the traction machine while in operation, ultimately resulting in the emergence of faults.
- (2)
- The temperature of the traction machine is excessively high. During operation, an abnormal increase in the temperature of the traction machine may result in the expansion of the main machine’s gear, causing a change in the eccentric distance. Meanwhile, as the temperature rises, the lubricating oil inside the traction machine undergoes chemical changes, leading to decreased concentration. This harms the traction machine and increases the friction, further intensifying heat generation.
- (3)
- Noise abnormalities in traction machines. The occurrence of noise anomalies in traction machines is often attributed to various factors. One significant factor is the wear or deformation of the traction machine or gearbox bearings. Additionally, changes in gear size can also contribute to noise anomalies.
- (4)
- Abnormal shaking of the carriage. An axial movement of the worm shaft of the traction motor leads to a coaxially over-difference between the knuckle diameter and aperture. This radial shift, in turn, causes the carriage to shake.
- (5)
- Wire rope wears seriously. The prolonged operation of an elevator results in significant wire rope wear, which is further compounded by the weight difference between the two sides of the guide wheel. This wear may lead to wire rope fracture if it exceeds acceptable limits.
2.3.2. Carriage System and Guidance System
- (1)
- The elevator carriage noise is serious. During the operational process, if the guide shoe wear exceeds the standard, it will expand the working gap. This, in turn, leads to intense friction between the metal piece of the shoe head and the guide rail, generating a noticeable noise. Additionally, if the bolt securing the anti-rope wheel becomes loose, it causes the deep groove to vibrate excessively. This augmented movement intensifies the wear on the bearings and, in extreme cases, may result in a broken shaft. Throughout this process, there is a distinct and audible noise.
- (2)
- The elevator carriage shakes abnormally. If the guide shoe wear exceeds the standard, it can expand the working gap, resulting in abnormal shaking of the carriage during operation. Additionally, deviations in the guide system’s verticality, spacing, and integration from the specified tolerances can cause changes in the horizontality of the carriage floor, ultimately generating vibrations.
- (3)
- The acceleration of the elevator’s up-and-down movement is unacceptably high. If there is an issue with the balance coefficient of the elevator, such as a lighter counterweight, it can result in a significant feeling of weightlessness for passengers when the fully loaded carriage is moving downward. Conversely, a heavier counterweight can lead to a significant feeling of being overweight when the elevator is ascending, creating an uncomfortable and potentially unsafe experience for passengers.
2.3.3. Door System and Safety Protection System
- (1)
- The elevator door gap is vast, resulting in the lock hook being misaligned and not fully engaging the door lock contact when the elevator is closed. Alternatively, the nut may become loose during the closing of the door, leading to a failure of the lock head and nut to mate securely. This condition causes the lock head to protrude and engage the floor prematurely, leading to an elevator malfunction.
- (2)
- An abnormal noise is emitted when the elevator opens and closes the door. This noise is attributed to an elevator automatic closing device malfunction or an abnormality in the wire rope, resulting in excessive tension. Additionally, severe wear on the door slider can produce friction or impact sounds.
2.3.4. Electrical Control System and Electrical Power Systems
- (1)
- Long-term service of the elevator can result in the aging of electrical components, the accumulation of moisture within internal parts due to failed sealing measures, and broken line insulation layers, all of which can contribute to short-circuit faults within the electrical system.
- (2)
- The malfunction of safety devices in the electrical system, such as the safety circuit and safety interlocking circuit, prevents the elevator from operating correctly.
- (3)
- The relays and contactors within the electrical control cabinet are short-circuited, resulting in the disconnection of the electrical system.
2.4. Elevator Operation Risk Evaluation Index System
3. Fuzzy Integrated Evaluation
3.1. Security Level Classification
3.2. Determination of Index Weights
3.3. Fuzzy Integrated Evaluation Method
- (1)
- Interval matrix. In this paper, the safety evaluation of the traction elevator, which comprises four central systems, defines the set of indexes as . Subsequently, the indicator matrix is
- (2)
- Relative affiliation. Considering that there are three superior levels and two inferior levels in the security level classification, the affiliation degrees for each level are calculated separately using the following formula:
- (3)
- Calculating the integrated affiliation and evaluation level. The integrated affiliation corresponding to the risk level is calculated as follows:
4. Results Fuzzy Integrated Evaluation
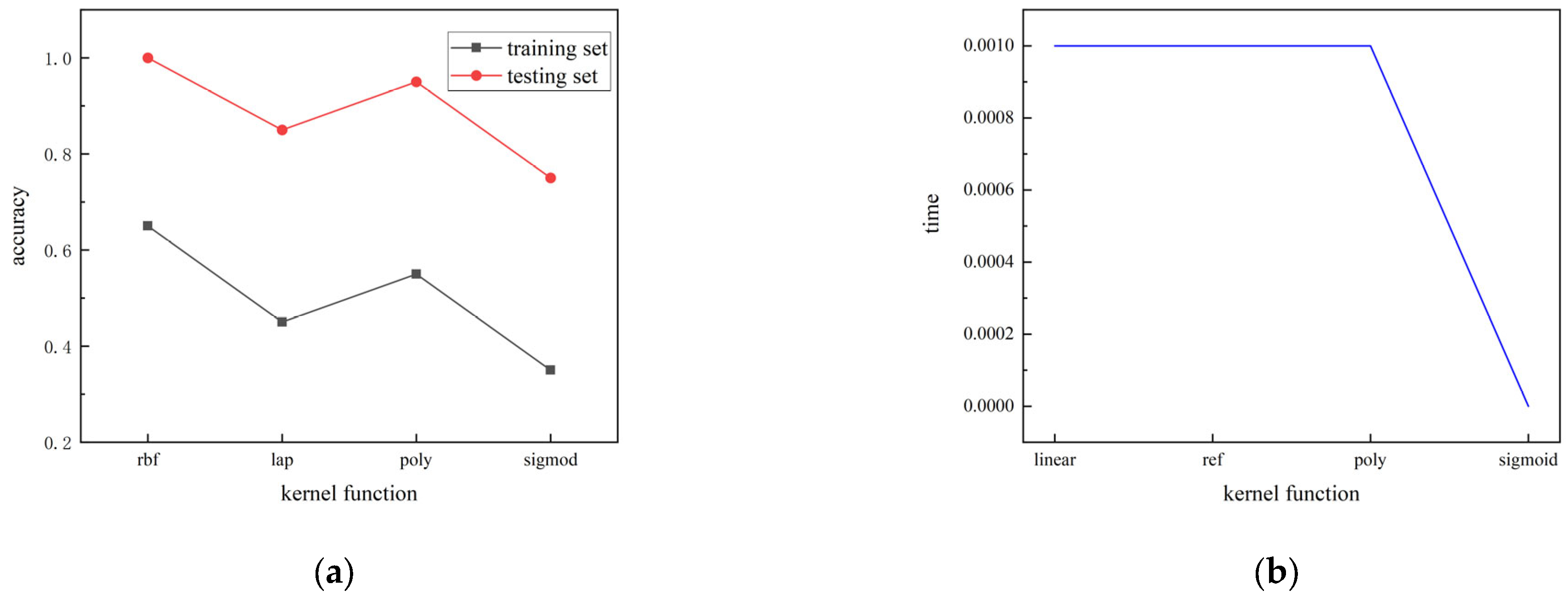
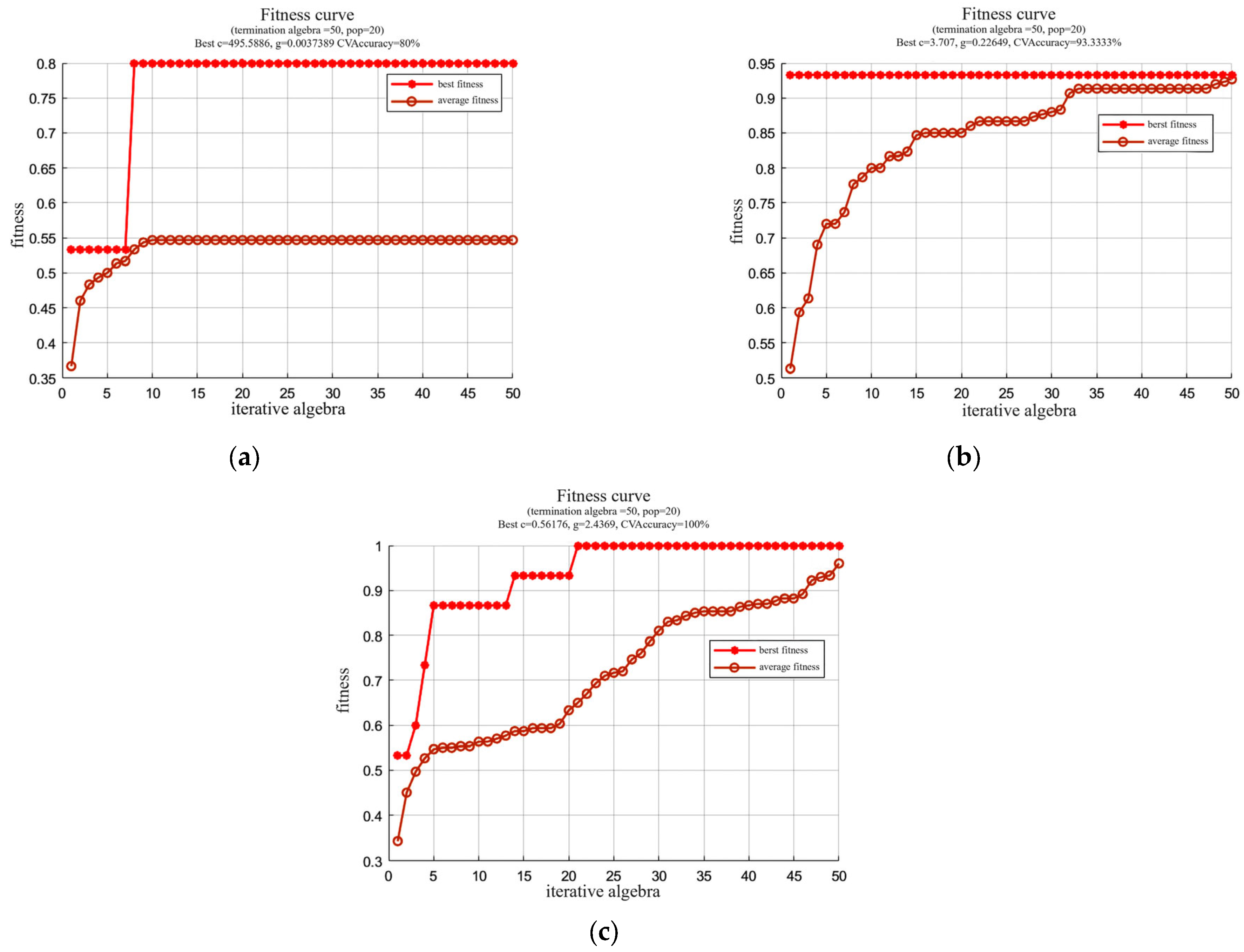
4.1. Kernel Function Selection
4.2. Optimization of the Evaluation System
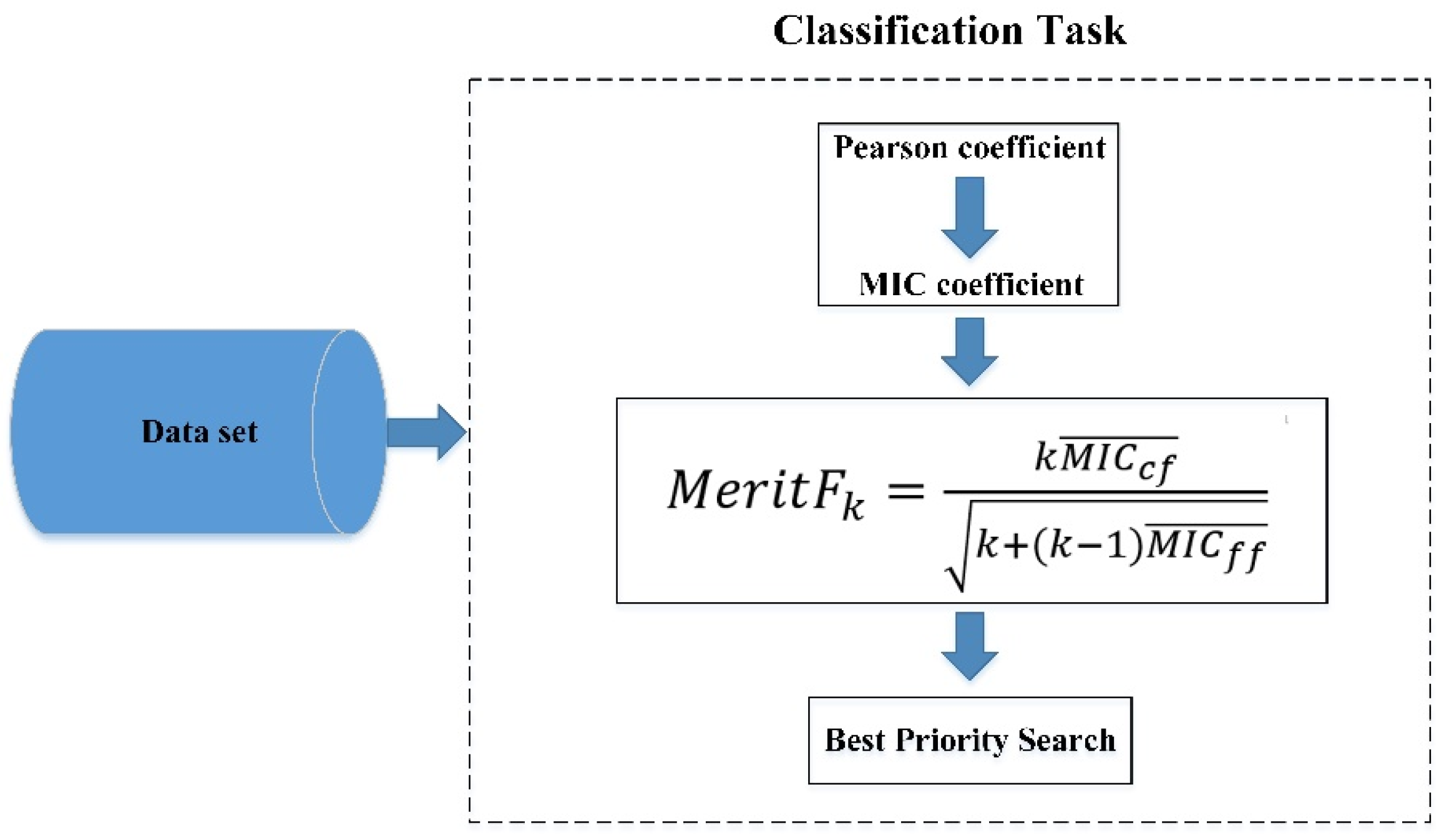
4.2.1. MIC-CFS Method
4.2.2. Feature Selection Results
4.2.3. Validation of Optimization Effect
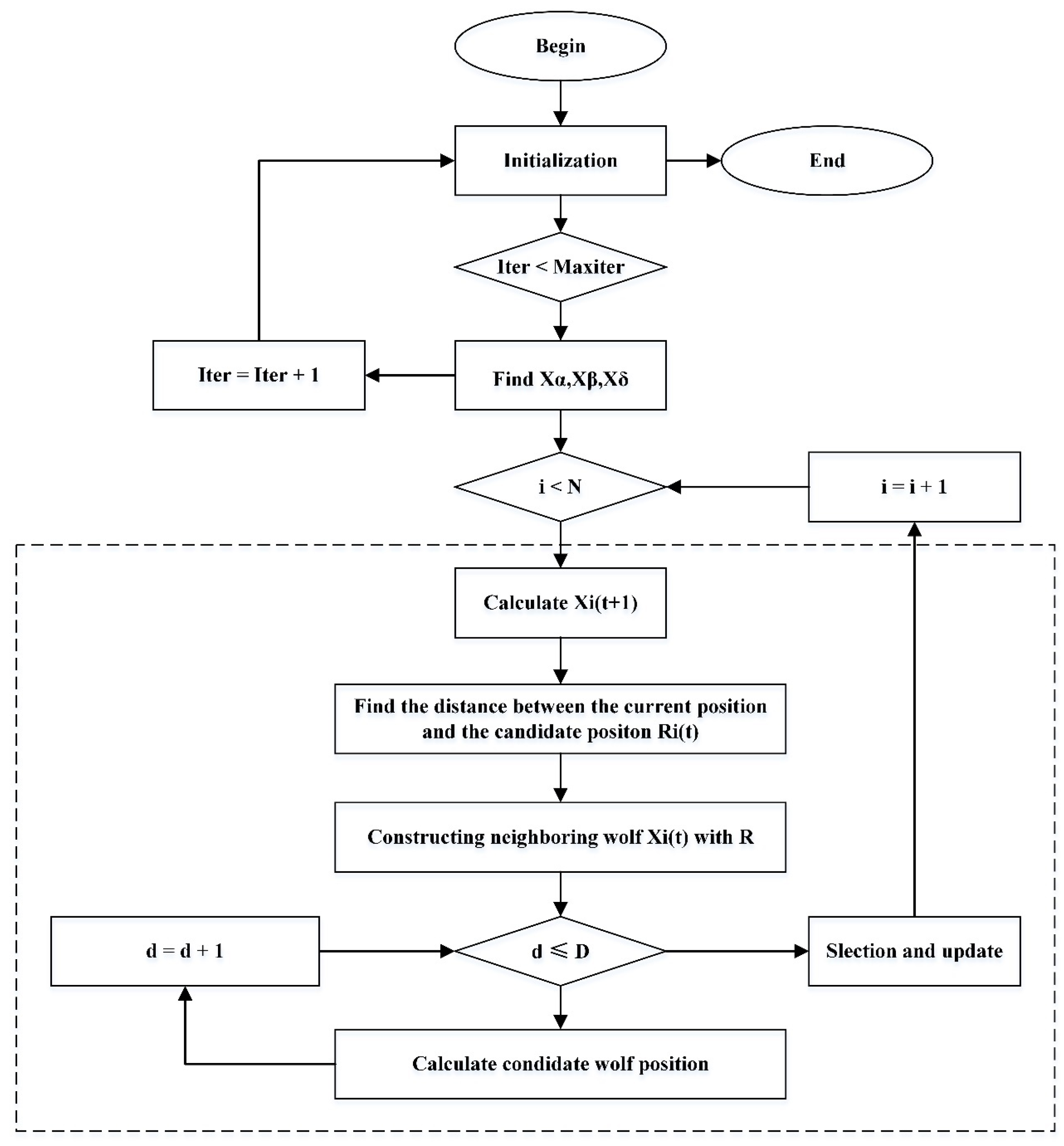
4.3. SVM Optimization Algorithm
- (1)
- Initialization phase: N wolves are randomly distributed within a predefined range of the search space, shown as
- (2)
- Movement phase: The IGWO is guided by a DLH search strategy. In this method, the calculated gray wolf candidate position is initially obtained through the traditional GWO search strategy. Subsequently, the DLH search strategy is used to calculate an additional candidate’s position . In the DLH search strategy, the Euclidean distance between the current grey wolf location and the additional candidate location is calculated as
- (3)
- Selection phase: The optimal candidate is selected by comparing the fitness of two candidates and , shown as
4.4. Experimental Validation
4.5. Evaluation Results
5. Conclusions
- (1)
- Applying the MIC-CFS method for feature selection in risk evaluation index systems with solid correlation reduces the number of model input parameters and leads to faster training convergence and higher, more stable accuracy. These findings emphasize the potential of the MIC-CFS approach to enhance the performance of machine learning models in nonlinear risk assessment tasks.
- (2)
- For the elevator operation risk evaluation model established in this paper, the accuracy of using RBF as the kernel function of SVM has apparent advantages. The parametrization of the SVM model is a crucial step, and implementing the IGWO algorithm yields optimal results. Notably, this approach effectively circumvents the risk of converging to local optima and exhibits superior accuracy and stability compared to other optimization algorithms.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- AQSIQ. Notice from the General Administration of Market Supervision on the Safety Situation of Special Equipment in the Country. Available online: https://gkml.samr.gov.cn/nsjg/tzsbj/202204/t20220419_341377.html (accessed on 27 October 2023).
- Kolowrocki, K. Asymptotic approach to reliability evaluation of rope transportation system. Reliab. Eng. Syst. Saf. 2001, 71, 57–64. [Google Scholar] [CrossRef]
- Bennetts, I.D.; Moinuddin, K.A.M.; Goh, C.C.; Thomas, I.R. Testing and factors relevant to the evaluation of the structural adequacy of steel members within fire-resistant elevator shafts. Fire Saf. J. 2005, 40, 698–727. [Google Scholar] [CrossRef]
- Yost, G.R.; Rothenfluh, T.R. Configuring elevator systems. Int. J. Hum.-Comput. Stud. 1996, 44, 521–568. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Baksteen, H.; Mud, M.; Ale, B.J.; Bellamy, L.J.; Hale, A.R.; Bloemhoff, A.; Post, J.; Oh, J. Quantified risk assessment for fall from height. Saf. Sci. 2008, 46, 198–220. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X.; Liu, C.; Wang, W. Reliability Evolution of Elevators Based on the Rough Set and the Improved TOPSIS Method. Math. Probl. Eng. 2018, 2018, 4784965. [Google Scholar] [CrossRef]
- Sun, S.; Shi, Z.; Li, Q. Safety Evaluation Model of Intelligent Elevator Cloud Management Platform. In Proceedings of the Communications, Signal Processing, and Systems; Springer: Singapore, 2020; pp. 1126–1132. [Google Scholar] [CrossRef]
- Gholami, J.; Razavi, A.; Ghaffarpour, R. Decision-making regarding the best maintenance strategy for electrical equipment of buildings based on fuzzy analytic hierarchy process; case study: Elevator. J. Qual. Maint. Eng. 2022, 28, 653–667. [Google Scholar] [CrossRef]
- Niu, D.; Guo, L.; Zhao, W.; Li, H. Operation performance evaluation of elevators based on condition monitoring and combination weighting method. Measurement 2022, 194, 111091. [Google Scholar] [CrossRef]
- Zhang, G.; Qiu, C.; Qian, X.; Huang, S. Application of fuzzy hierarchical analysis and artificial neural network models in elevator wind risk assessment. Control. Theory Appl. 2009, 26, 931–933. [Google Scholar]
- Guo, B.; Zhang, L.; Li, Y. Research on the path of residents’ willingness to upgrade by installing elevators in old residential quarters based on safety precautions. Saf. Sci. 2019, 118, 389–396. [Google Scholar] [CrossRef]
- Yu, J.; Hu, B. Influence of the combination of big data technology on the Spark platform with deep learning on elevator safety monitoring efficiency. PLoS ONE 2020, 15, e0234824. [Google Scholar] [CrossRef]
- Chai, S.; Li, X.I.; Jia, Y.; He, Y.; Yip, C.H.; Cheung, K.K.; Wang, M. A Non-Intrusive Deep Learning Based Diagnosis System for Elevators. IEEE Access 2021, 9, 20993–21003. [Google Scholar] [CrossRef]
- Wan, L.; Zhang, G.; Tao, J. Lift safety assessment based on AHP-CRITIC. J. Saf. Environ. 2017, 17, 1696–1700. [Google Scholar] [CrossRef]
- Zhang, G.; Wan, L.; Huang, Y. Fuzzy integrated assessment of elevator operational reliability based on cloud model. J. Saf. Sci. Technol. 2016, 12, 175–179. [Google Scholar] [CrossRef]
- Tao, T.; Xin, K.; Lv, C.; Liu, S. Evaluation of drinking water quality in a water supply distribution network based on Grey correlation analysis. J. Water Supply Res. Technol.-Aqua 2011, 60, 448–458. [Google Scholar] [CrossRef]
- Lin, Z.; Wang, S. Classification of fire safety levels in road tunnels based on risk analysis. Fire Sci. Technol. 2010, 29, 394–398. [Google Scholar] [CrossRef]
- Zhang, X. Application of AHP-Fuzzy Comprehensive Evaluation Method in Safety Evaluation of Elevator Use Management System. J. Saf. Environ. 2011, 11, 236–239. [Google Scholar] [CrossRef]
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef]
- Catoni, O. Statistical learning theory and stochastic optimization. In Statistical Learning Theory and Stochastic Optimization: Ecole D’ete De Probabilities De Saint-Flour Xxxi 2001; Picard, J., Ed.; Lecture Notes in Mathematics; Springer Science & Business Media: Berlin, Germany, 2004; Volume 1851. [Google Scholar]
- Cai, J.; Luo, J.; Wang, S.; Yang, S. Feature selection in machine learning: A new perspective. Neurocomputing 2018, 300, 70–79. [Google Scholar] [CrossRef]
- Zhou, P.; Hu, X.; Li, P.; Wu, X. OFS-Density: A novel online streaming feature selection method. Pattern Recognit. 2019, 86, 48–61. [Google Scholar] [CrossRef]
- Liu, J.; Lin, Y.; Lin, M.; Wu, S.; Zhang, J. Feature selection based on quality of information. Neurocomputing 2017, 225, 11–22. [Google Scholar] [CrossRef]
- Hall, M.A. Correlation-Based Feature Selection for Machine Learning. Doctoral Dissertation, The University of Waikato, Hamilton, New Zealand, 1999. [Google Scholar]
- Senliol, B.; Gulgezen, G.; Yu, L.; Cataltepe, Z. Fast Correlation Based Filter (FCBF) with a different search strategy. In Proceedings of the 2008 23rd International Symposium on Computer and Information Sciences, Istanbul, Turkey, 27–29 October 2008; pp. 1–4. [Google Scholar]
- Pearson, K.; Henrici, O.M.F.E. VII. Mathematical contributions to the theory of evolution.—III. Regression, heredity, and panmixia. Philos. Trans. R. Soc. London. Ser. A Contain. Pap. A Math. Or Phys. Character 1997, 187, 253–318. [Google Scholar] [CrossRef]
- Gábor, J.S.; Maria, L.R.; Nail, K.B. Measuring and testing dependence by correlation of distances. Ann. Stat. 2007, 35, 2769–2794. [Google Scholar] [CrossRef]
- Reshef, D.N.; Reshef, Y.A.; Finucane, H.K.; Grossman, S.R.; McVean, G.; Turnbaugh, P.J.; Lander, E.S.; Mitzenmacher, M.; Sabeti, P.C. Detecting Novel Associations in Large Data Sets. Science 2011, 334, 1518–1524. [Google Scholar] [CrossRef] [PubMed]
- Sun, G.; Li, J.; Dai, J.; Song, Z.; Lang, F. Feature selection for IoT based on maximal information coefficient. Future Gener. Comput. Syst. 2018, 89, 606–616. [Google Scholar] [CrossRef]
- Kinney, J.B.; Atwal, G.S. Equitability, mutual information, and the maximal information coefficient. Proc. Natl. Acad. Sci. USA 2014, 111, 3354–3359. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Zhang, S. Maximum information coefficient based correlation analysis method for delay data. Electron. Meas. Technol. 2015, 38, 112–115. [Google Scholar] [CrossRef]
- Wang, J.; Xie, M.; Yang, L.; Tang, Z.; Yang, Z. A study on cloud type recognition based on improved mRMR feature selection. Meteorol. Sci. Technol. 2013, 41, 803–808. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Li, T.; Qian, Z.; He, T. Short-Term Load Forecasting with Improved CEEMDAN and GWO-Based Multiple Kernel ELM. Complexity 2020, 2020, 1209547. [Google Scholar] [CrossRef]
- Zhou, J.; Huang, S.; Zhou, T.; Armaghani, D.J.; Qiu, Y. Employing a genetic algorithm and grey wolf optimizer for optimizing RF models to evaluate soil liquefaction potential. Artif. Intell. Rev. 2022, 55, 5673–5705. [Google Scholar] [CrossRef]
- Lu, S.; Li, M.; Luo, N.; He, W.; He, X.; Gan, C.; Deng, R. Lithology Logging Recognition Technology Based on GWO-SVM Algorithm. Math. Probl. Eng. 2022, 2022, 1640096. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K.; Moayedi, H.; Foong, L.K.; Assad, A. Sine cosine grey wolf optimizer to solve engineering design problems. Eng. Comput. 2021, 37, 3123–3149. [Google Scholar] [CrossRef]
- Faris, H.; Aljarah, I.; Alqatawna, J. Optimizing Feedforward neural networks using Krill Herd algorithm for E-mail spam detection. In Proceedings of the 2015 IEEE Jordan Conference on Applied Electrical Engineering and Computing Technologies (AEECT), Amman, Jordan, 3–5 November 2015; pp. 1–5. [Google Scholar]
- Faris, H.; Mafarja, M.M.; Heidari, A.A.; Aljarah, I.; Al-Zoubi, A.M.; Mirjalili, S.; Fujita, H. An efficient binary Salp Swarm Algorithm with crossover scheme for feature selection problems. Knowl.-Based Syst. 2018, 154, 43–67. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Xu, L.; Yu, X.; Gulliver, T.A. Intelligent Outage Probability Prediction for Mobile IoT Networks Based on an IGWO-Elman Neural Network. IEEE Trans. Veh. Technol. 2021, 70, 1365–1375. [Google Scholar] [CrossRef]
- Xiong, K.; Yue, C.; Liu, D. Fault diagnosis of SVM analog circuits based on IGWO algorithm optimization. Microelectron. Comput. 2019, 36, 16–21. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, R.; Gong, C.; Zhao, L. An improved study based on the Grey Wolf algorithm. Appl. Res. Comput. 2017, 34, 3603–3606, 3610. [Google Scholar] [CrossRef]
- Wang, Z.; Xie, H.; Hu, Z.; Li, D.; Wang, J.; Liang, W. Node coverage optimization algorithm for wireless sensor networks based on improved grey wolf optimizer. J. Algorithms Comput. Technol. 2019, 13, 1748302619889498. [Google Scholar] [CrossRef]
- Cai, Z.; Gu, J.; Luo, J.; Zhang, Q.; Chen, H.; Pan, Z.; Li, Y.; Li, C. Evolving an optimal kernel extreme learning machine by using an enhanced grey wolf optimization strategy. Expert Syst. Appl. 2019, 138, 112814. [Google Scholar] [CrossRef]
- Du, R.; Yang, C.; Pu, Y. Non-intrusive load monitoring method based on steady-state features and IGWO-FCM fuzzy clustering. Electr. Meas. Instrum. 2021, 58, 152–157. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-System | Index |
|---|---|
| Traction and weight balance system (U1) | Stator winding temperature (U11) |
| Tri-voltage (U12) | |
| Tri-current (U13) | |
| Bearing vibration acceleration (U14) | |
| Traction machine noise (U15) | |
| Wire rope wear amount (U16) | |
| Carriage and guidance system (U2) | Vertical vibration acceleration (U21) |
| Carriage noise (U22) | |
| Carriage horizontality (U23) | |
| Balance coefficient (U24) | |
| Horizontal vibration acceleration (U25) | |
| Door and safety protection system (U3) | Door clearance (U31) |
| Switching door noise (U32) | |
| Leveling accuracy (U33) | |
| Electrical system (U4) | Startup process acceleration (U41) |
| Deceleration of braking process (U42) | |
| Smooth running speed (U43) |
| Risk Level | Evaluation Language | Evaluation Definition | Tags |
|---|---|---|---|
| I | High security | Excellent elevator index and safe operation | 1 |
| II | Moderate Security | Elevator indicators are within the acceptable range and at a lower limit | 2 |
| III | Low security | Elevator indicators are within the acceptable range but at an upper limit risk | 3 |
| IV | Dangerous | Elevator indicators have exceeded the acceptable range, and the elevator is at risk | 4 |
| V | Very dangerous | Elevator indicators are seriously deviating from the safe zone, and the elevator is in grave danger | 5 |
| Indicators | High Security I | Moderate Security II | Low Security III | Dangerous IV | Very Dangerous V |
|---|---|---|---|---|---|
| Stator winding temperature (U11/°C) | 50–57 | 57–64 | 64–71 | 71–78 | 78–85 |
| Tri-voltage (U12/V) | 380–386 | 386–398 | 398–410 | 410–422 | 422–434 |
| Tri-current (U13/A) | 30.0–31.5 | 31.5–34.5 | 34.5–37.5 | 37.5–40.5 | 40.5–43.5 |
| Bearing vibration acceleration (U14/) | 0.40–0.53 | 0.53–0.66 | 0.66–0.79 | 0.79–0.92 | 0.92–1.05 |
| Traction machine noise (U15/dB) | 35–40 | 40–45 | 45–50 | 50–55 | 55–60 |
| Wire rope wear amount (U16/mm) | 0–0.2 | 0.2–0.4 | 0.4–0.6 | 0.6–0.8 | 0.8–1.0 |
| Vertical vibration acceleration (U21/) | 0.15–0.20 | 0.20–0.25 | 0.25–0.30 | 0.30–0.35 | 0.35–0.50 |
| Carriage noise (U22/dB) | 35–40 | 40–45 | 45–50 | 50–55 | 55–60 |
| Carriage horizontality (U23/mm) | 0–0.25 | 0.25–0.50 | 0.50–0.75 | 0.75–1.0 | 1.0–1.25 |
| Balance coefficient (U24) | 0.455–0.470 | 0.470–0.485 | 0.485–0.490 | 0.490–0.505 | 0.505–0.520 |
| Horizontal vibration acceleration (U25) | 0.10–0.15 | 0.15–0.20 | 0.20–0.25 | 0.25–0.30 | 0.30–0.40 |
| Door clearance (U31/mm) | 3.0–3.6 | 3.6–4.2 | 4.2–4.8 | 4.8–5.4 | 5.4–6.0 |
| Switching door noise (U32/dB) | 30–38 | 38–46 | 46–54 | 54–62 | 62–70 |
| Leveling accuracy (U33/mm) | 5–9 | 9–13 | 13–17 | 17–21 | 21–25 |
| Startup process acceleration (U41/) | 0.92–1.05 | 1.05–1.18 | 1.18–1.31 | 1.31–1.44 | 1.44–1.57 |
| Deceleration of braking process (U42/) | 0.27–0.40 | 0.40–0.53 | 0.53–0.66 | 0.66–0.79 | 0.79–0.92 |
| Smooth running speed (U43/) | 1.36–1.58 | 1.58–1.82 | 1.82–1.97 | 1.97–2.21 | 2.21–2.45 |
| Sub-System | Secondary Indicators | |
|---|---|---|
| Traction and weight balance system (U1) | Stator winding temperature (U11) | 0.0621 |
| Tri-voltage (U12) | 0.0418 | |
| Tri-current (U13) | 0.0737 | |
| Bearing vibration acceleration (U14) | 0.0690 | |
| Traction machine noise (U15) | 0.0366 | |
| Wire rope wear amount (U16) | 0.0393 | |
| Carriage and guidance system (U2) | Vertical vibration acceleration (U21) | 0.0367 |
| Carriage noise (U22) | 0.0360 | |
| Carriage horizontality (U23) | 0.0564 | |
| Balance coefficient (U24) | 0.0503 | |
| Horizontal vibration acceleration (U25) | 0.0282 | |
| Door and safety protection system (U3) | Door clearance (U31) | 0.0677 |
| Switching door noise (U32) | 0.0635 | |
| Leveling accuracy (U33) | 0.0375 | |
| Electrical system (U4) | Startup process acceleration (U41) | 0.1690 |
| Deceleration of braking process (U42) | 0.0786 | |
| Smooth running speed (U43) | 0.0530 |
| Indicator Set | Highest Accuracy | Minimum Accuracy | Average Accuracy |
|---|---|---|---|
| 73.33% | 60% | 66.68% | |
| 73.33% | 66.67% | 68.69% | |
| 33.33% | 0 | 23.31% | |
| 46.67% | 26.67% | 35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, W.; Xiang, Y.; Gong, W.; Shen, H. Risk Evaluation of Elevators Based on Fuzzy Theory and Machine Learning Algorithms. Mathematics 2024, 12, 113. https://doi.org/10.3390/math12010113
Pan W, Xiang Y, Gong W, Shen H. Risk Evaluation of Elevators Based on Fuzzy Theory and Machine Learning Algorithms. Mathematics. 2024; 12(1):113. https://doi.org/10.3390/math12010113
Chicago/Turabian StylePan, Wei, Yi Xiang, Weili Gong, and Haiying Shen. 2024. "Risk Evaluation of Elevators Based on Fuzzy Theory and Machine Learning Algorithms" Mathematics 12, no. 1: 113. https://doi.org/10.3390/math12010113