
Health Status Detection for Motor Drive Systems Based on Generalized-Layer-Added Principal Component Analysis


Abstract
1. Introduction
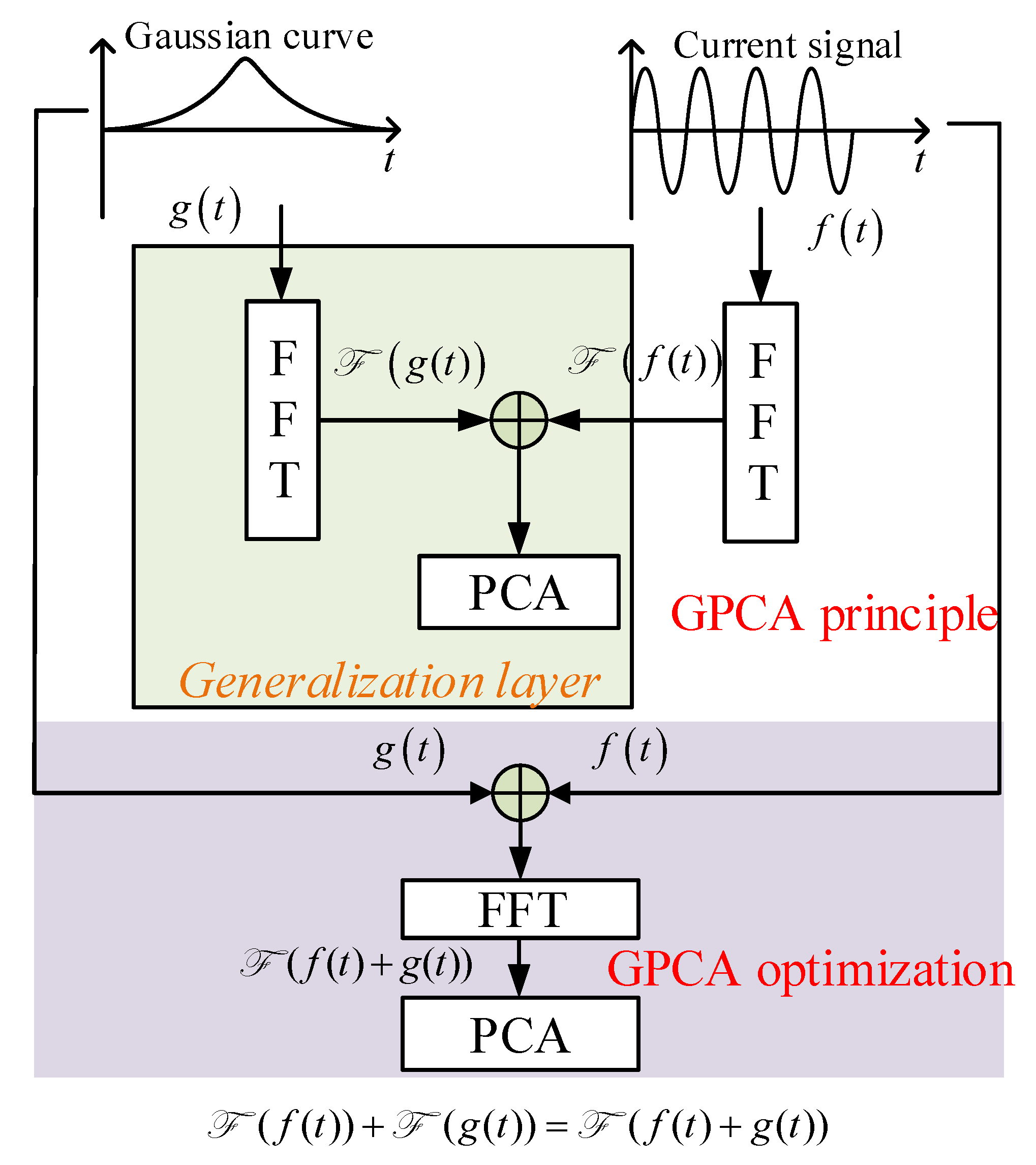
- This paper proposes the GPCA method, which addresses the issue of unreliable diagnostic results caused by singular matrix training sets by introducing a generalization layer.
- This paper proposes a health status detection method for motor drive systems, including motor working status detection and the diagnosis of inverter faults in motor control.
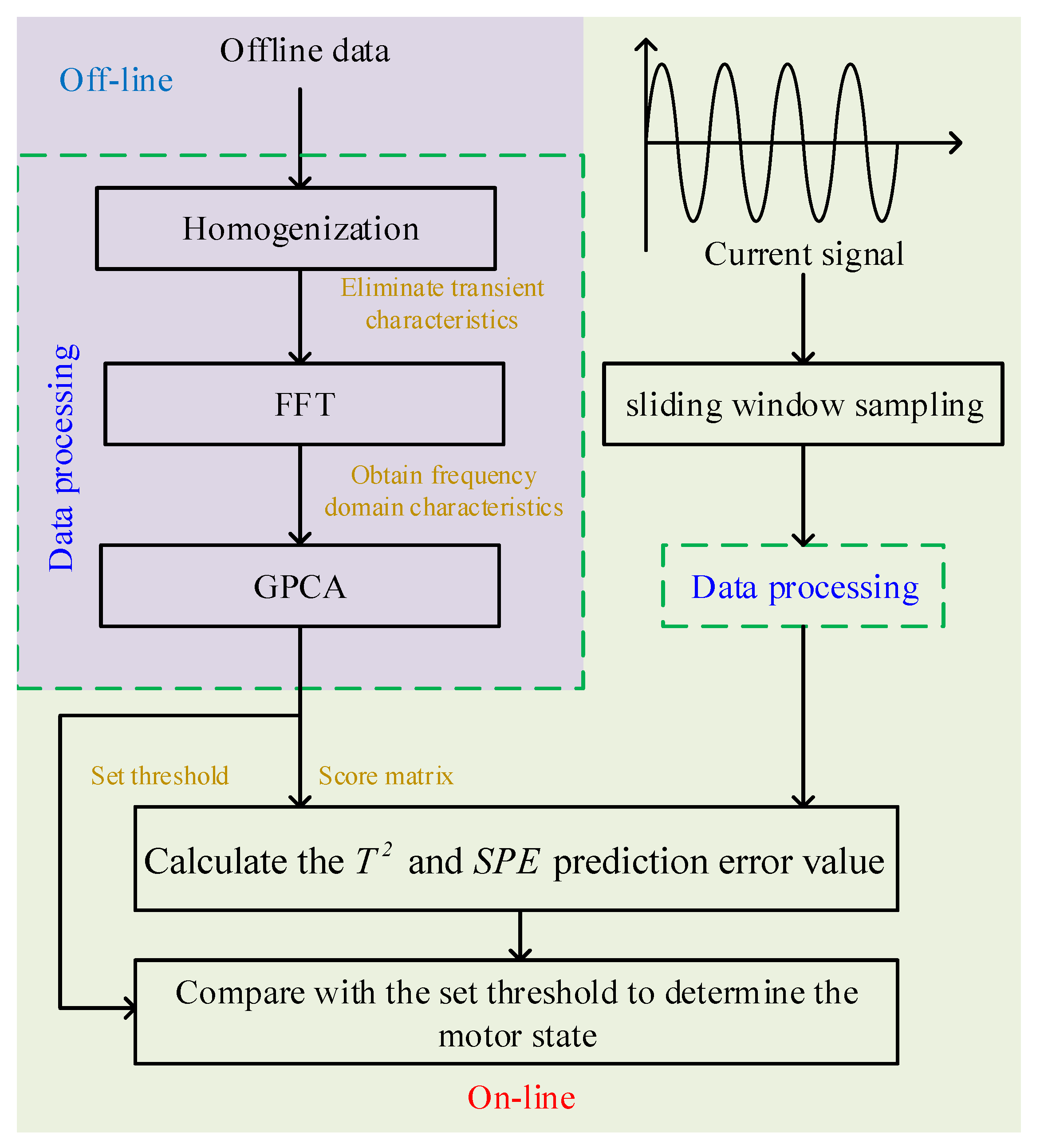
- The method proposed in this paper only requires current data from the stable working states of the motor for offline training, enabling online health status detection of motor drive systems.
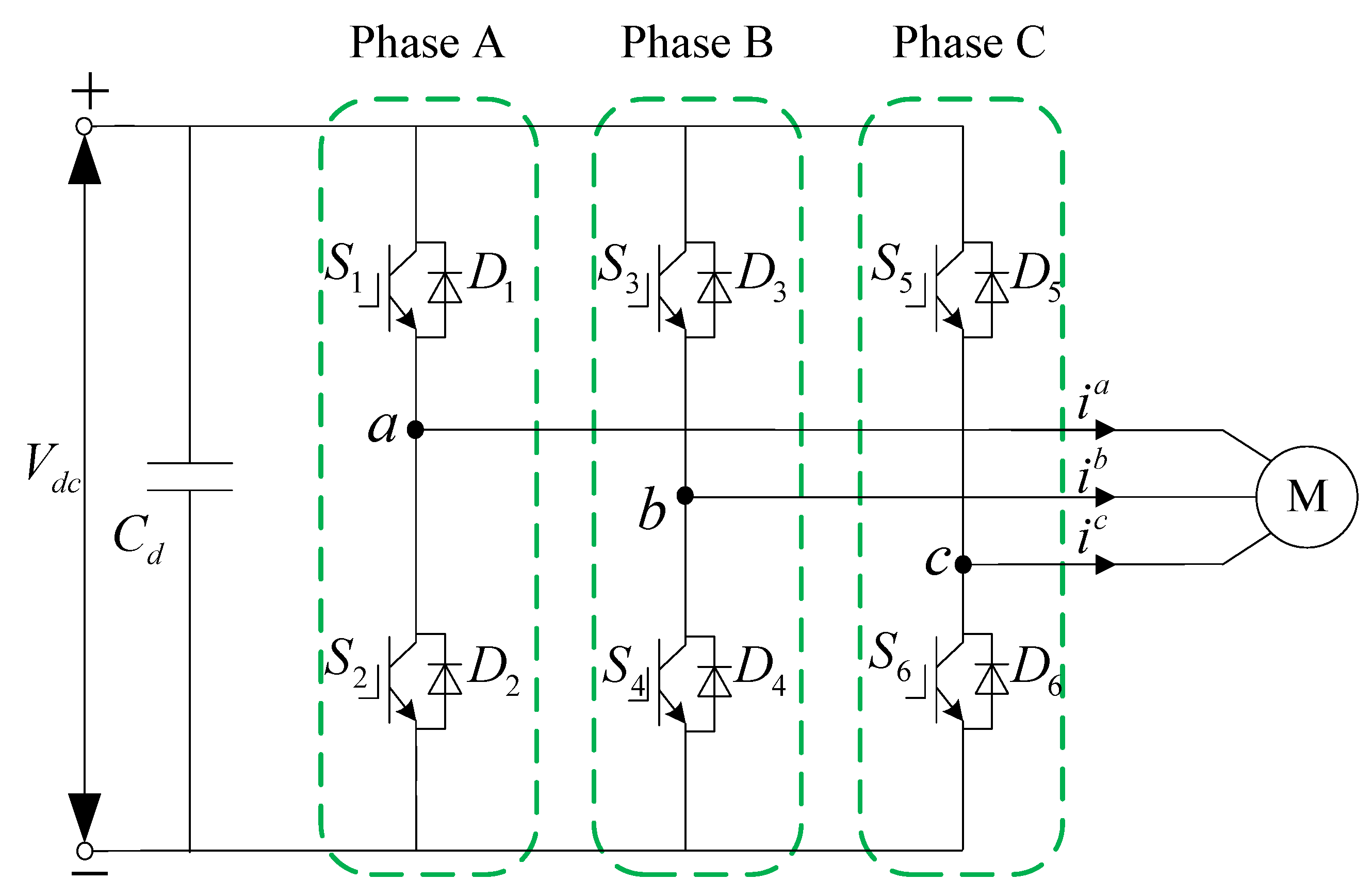
2. Topology and State Analysis of Power Circuits in Motor Drive Systems
2.1. Power Circuit Topology of a Motor Drive System
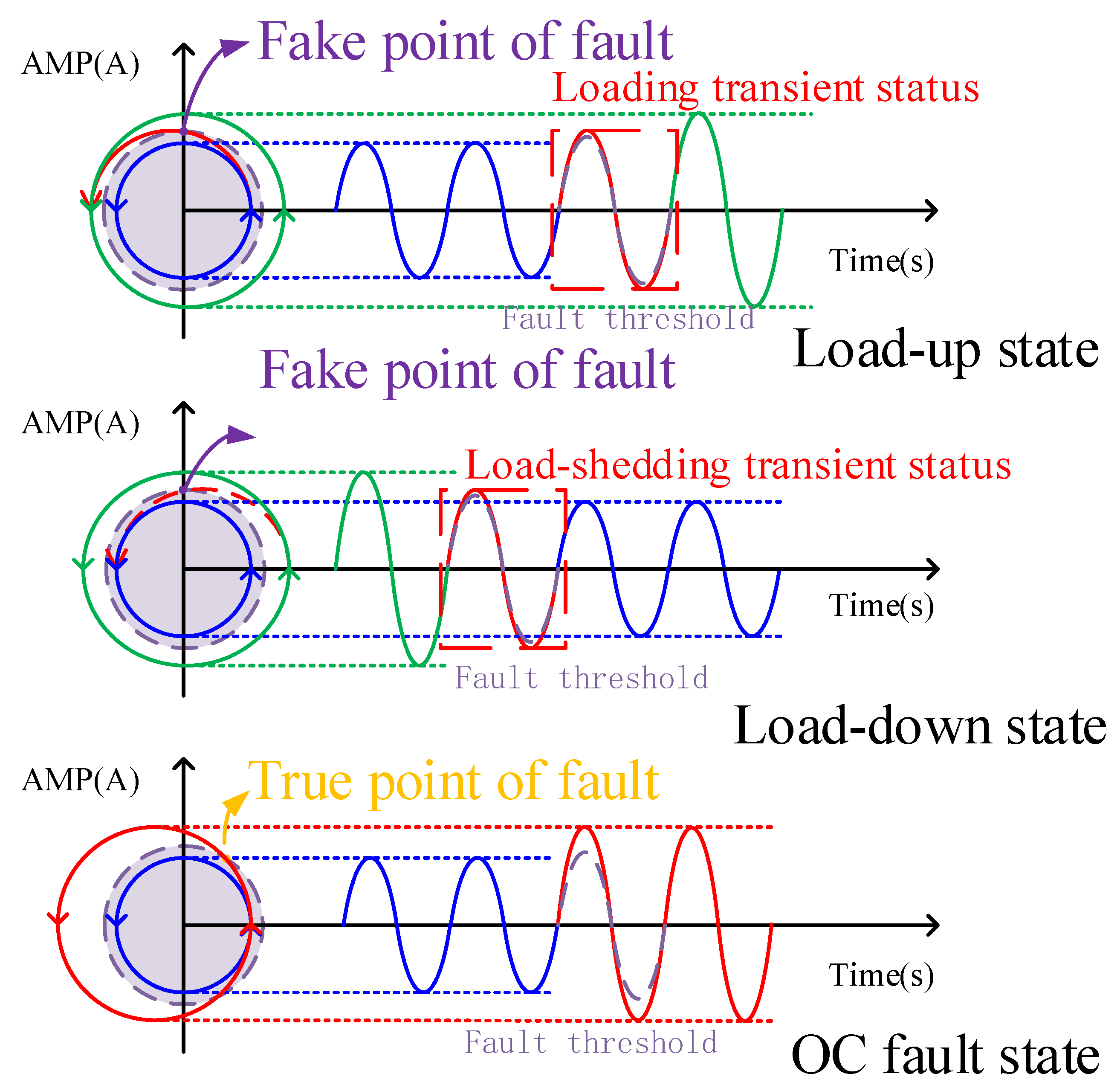
2.2. Load-Up/Load-Shedding Transient Process Analysis and Its Influence on Fault Diagnosis
3. The Methodology for Health Status Detection for Motor Drive Systems
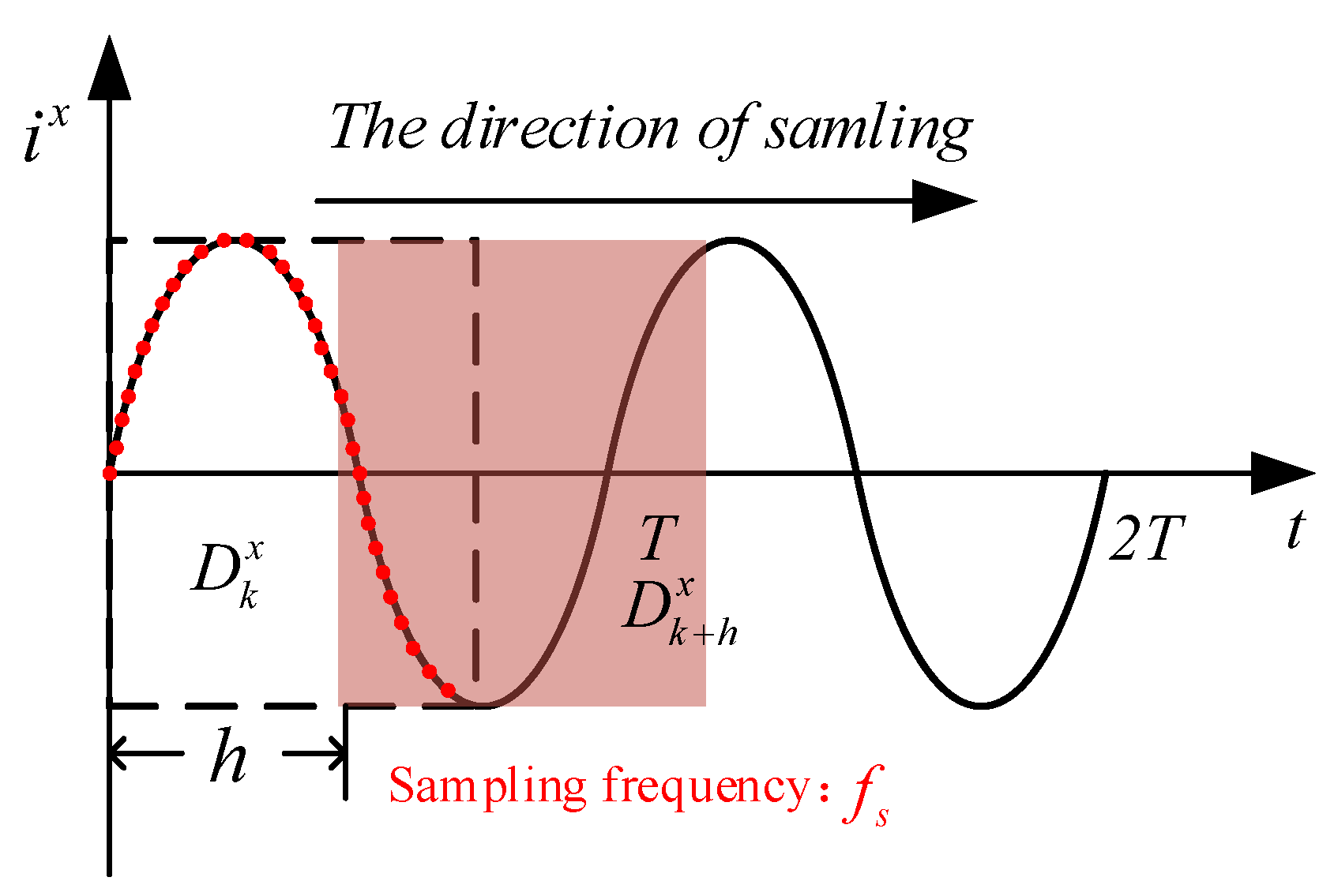
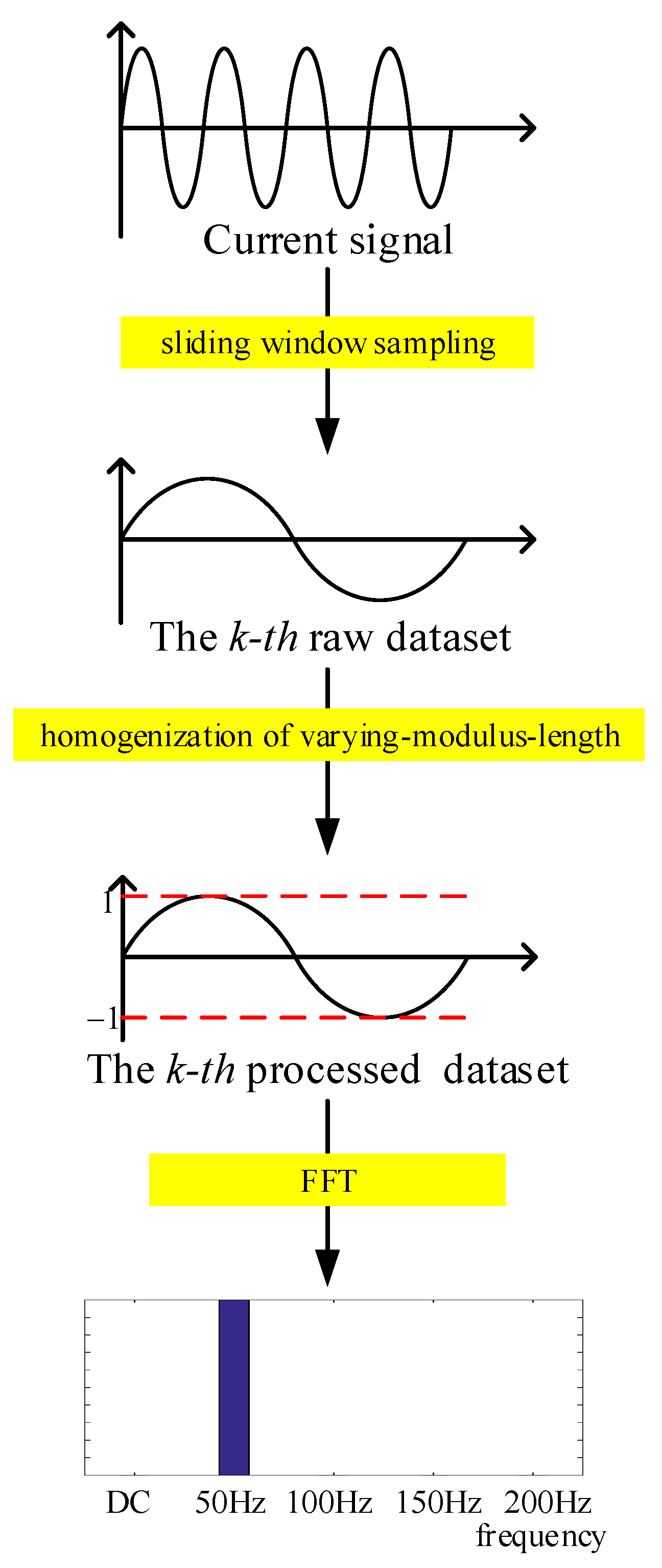
3.1. The Homogenization Process and Feature Extraction Using a Varying Modulus Length to Eliminate Transient Effects
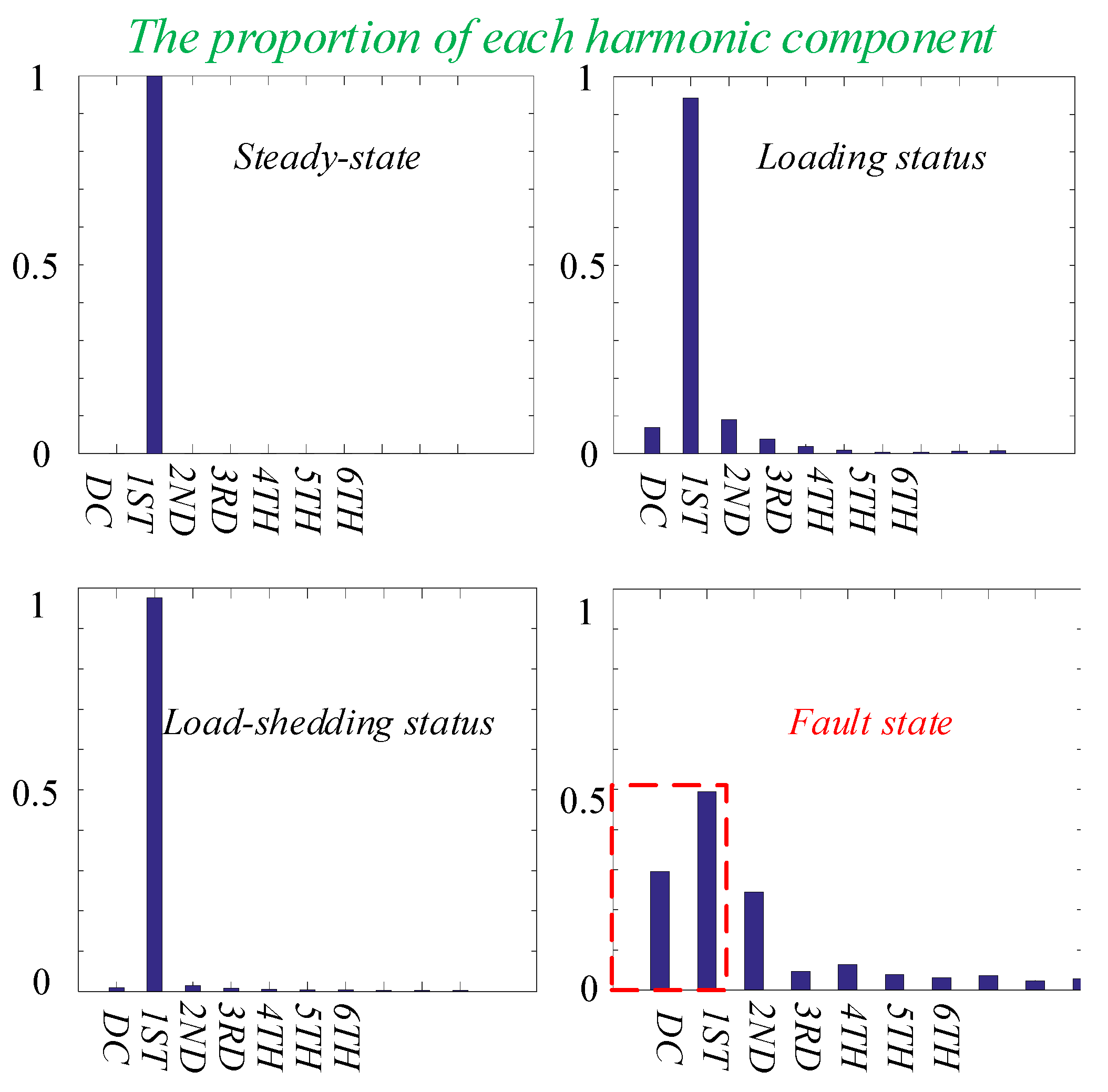
3.2. Feature Extraction Based on the FFT
3.3. Motor Working State Detection and OC Fault Diagnosis of Inverters Based on GPCA
4. Results and Discussion
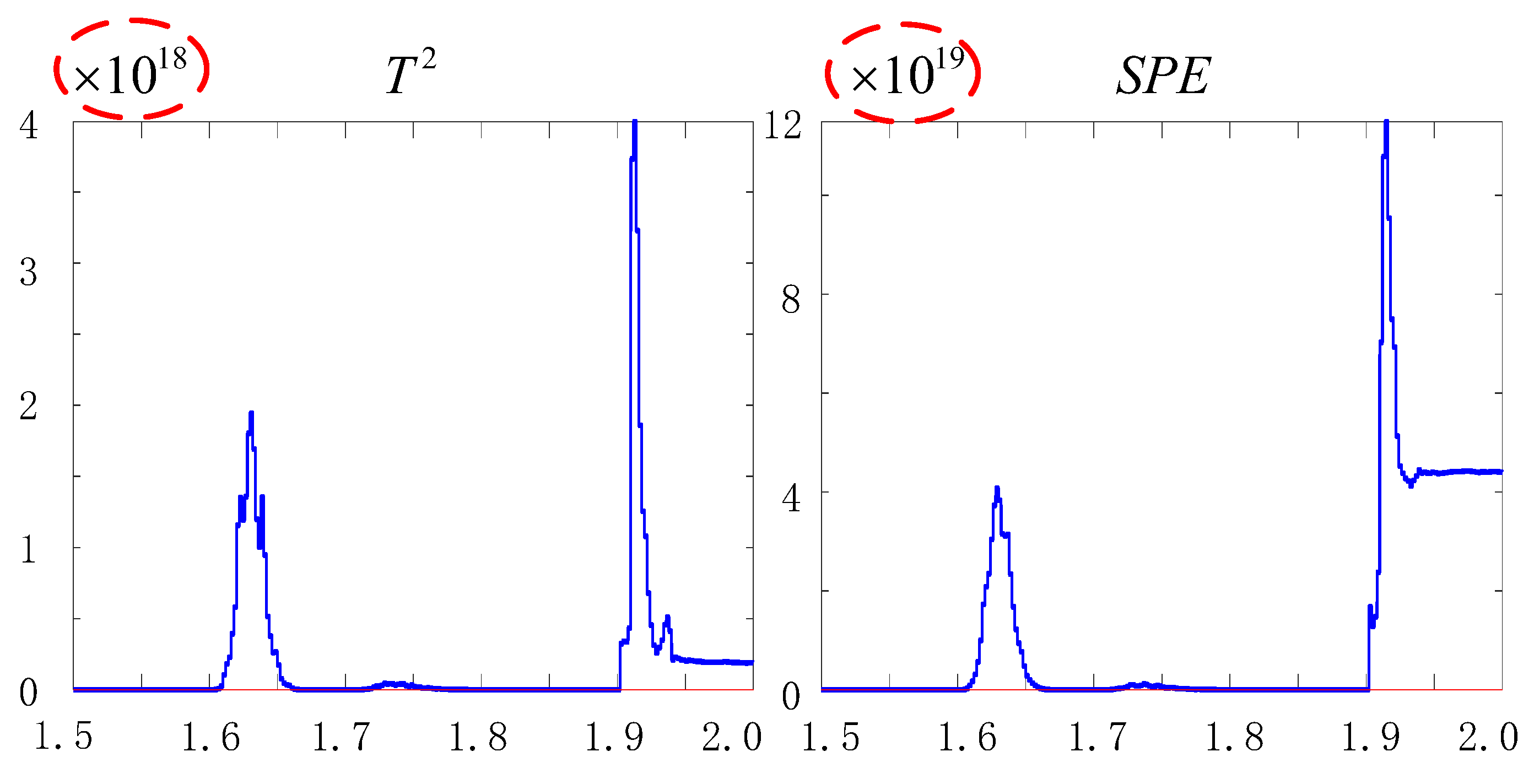
4.1. Motor Working State Detection
4.2. OC Fault Diagnosis of VSIs
4.3. Simulation and Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, Y.; Zhao, J. Model Predictive Flux Control-Based Open-Circuit Fault Diagnosis Method for Two-Level Three-Phase Inverter Induction Motor Drive. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 3912–3916. [Google Scholar]
- Manikandan, R.; Raja Singh, R. Fault diagnosis of wind turbine power converter using intrinsic mode functions with relative energy entropy. Circuit World 2024, 50, 90–107. [Google Scholar]
- Manikandan, R.; Raja Singh, R. Robust Open-Circuit Fault Diagnosis of Multi-Phase Floating Interleaved DC–DC Boost Converter Based on Sliding Mode Observer. IEEE Trans. Transp. Electrif. 2019, 5, 638–649. [Google Scholar]
- Zhou, Y.; Zhao, J.; Song, Y.; Sun, J.; Fu, H.; Chu, M. A Seasonal-Trend Decomposition Based Voltage-Source-Inverter Open-Circuit Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2022, 37, 15517–15527. [Google Scholar] [CrossRef]
- Seninete, S.; Abed1, M.; Bendiabdellah, A.; Mimi, M.; Belouchrani, A.; Ali, A.O.; Cherif, B.D.E. On the use of high-resolution time-frequency distribution based on a polynomial compact support kernel for fault detection in a two-level inverter. Period. Polytech. Electr. Eng. Comput. Sci. 2020, 64, 352–365. [Google Scholar] [CrossRef]
- Manikandan, R.; Raghu, S.; Singh, R.R. An Improved Open Switch Fault Diagnosis Strategy for Variable Speed Drives. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), Trivandrum, India, 2–5 January 2022. [Google Scholar]
- Sahin, I.; Keysan, O. Model Predictive Controller Utilized as an Observer for Inter-Turn Short Circuit Detection in Induction Motors. IEEE Trans. Energy Convers. 2021, 36, 1449–1458. [Google Scholar] [CrossRef]
- Rajeswaran, N.; Thangaraj, R.; Mihet-Popa, L.; Krishna Vajjala, K.V.; Özer, Ö. FPGA implementation of AI-based inverter IGBT open circuit fault diagnosis of induction motor drives. Micromachines 2022, 13, 663. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Diao, N.; Song, C.; Qiu, Y.; Zhao, X. An Open-Circuit Fault Diagnosis Method Based on Adjacent Trend Line Relationship of Current Vector Trajectory for Motor Drive Inverter. Machines 2023, 11, 928. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Zou, J.; Fang, Y.; Cai, F. A novel open-circuit fault diagnosis method for voltage source inverters with a single current sensor. IEEE Trans. Power Electron. 2017, 33, 8775–8786. [Google Scholar] [CrossRef]
- Liang, Y.; Wang, R.; Hu, B. Single-Switch Open-Circuit Diagnosis Method Based on Average Voltage Vector for Three-Level T-Type Inverter. IEEE Trans. Power Electron. 2021, 36, 911–921. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, Y. A Transferrable Data-Driven Method for IGBT Open-Circuit Fault Diagnosis in Three-Phase Inverters. IEEE Trans. Power Electron. 2021, 36, 13478–13488. [Google Scholar] [CrossRef]
- Gou, B.; Xu, Y.; Xia, Y.; Deng, Q.; Ge, X. An Online Data-Driven Method for Simultaneous Diagnosis of IGBT and Current Sensor Fault of Three-Phase PWM Inverter in Induction Motor Drives. IEEE Trans. Power Electron. 2020, 35, 13281–13294. [Google Scholar] [CrossRef]
- Cherif, B.D.E.; Seninete, S.; Defdaf, M.; Berrabah, F. Diagnosis of Three-Phase Two-Level Voltage Inverter Under Open-Circuit Fault of an IGBT. In Artificial Intelligence and Heuristics for Smart Energy Efficiency in Smart Cities; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2022; pp. 674–681. [Google Scholar]
- Cherif, B.D.E.; Bendiabdellah, A.; Bendjebbar, M.; Tamer, A. Neural network based fault diagnosis of three phase inverter fed vector control induction motor. Period. Polytech. Electr. Eng. Comput. Sci. 2019, 63, 295–395. [Google Scholar] [CrossRef]
- Gmati, B.; Jlassi, I.; Khojet El Khil, S.; Marques Cardoso, A.J. Open-switch fault diagnosis in voltage source inverters of PMSM drives using predictive current errors and fuzzy logic approach. IET Power Electron. 2021, 14, 1059–1072. [Google Scholar] [CrossRef]
- Cherif, B.D.E.; Chouai, M.; Seninete, S.; Bendiabdellah, A. Machine-Learning-Based Diagnosis of an Inverter-Fed Induction Motor. IEEE Lat. Am. Trans. 2022, 20, 901–911. [Google Scholar] [CrossRef]
- Lee, H.-W.; Lee, K.-B. Open-Circuit Fault Diagnosis and Fault-Tolerant Operation of Dual Inverter for Open-End Winding Interior Permanent Magnet Synchronous Motor. In Proceedings of the 2022 IEEE 5th Student Conference on Electric Machines and Systems (SCEMS), Busan, Republic of Korea, 24–26 November 2022. [Google Scholar]
- Zhang, X.; Ren, X. Two Dimensional Principal Component Analysis based Independent Component Analysis for face recognition. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 934–936. [Google Scholar]
- Pei, Y. Linear Principal Component Discriminant Analysis. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 9–12 October 2015; pp. 2108–2113. [Google Scholar]
- Martins, J.F.; Pires, V.F.; Lima, C.; Pires, A.J. Fault detection and diagnosis of grid-connected power inverters using PCA and current mean value. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 5185–5190. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Advantages | Disadvantages |
|---|---|---|
| Current-based [4,5,6,7,8,9,10] | Fast detection speed | Low detection accuracy |
| Voltage-based [11] | High detection accuracy | High cost |
| Data-driven [12,13,14,15,16,17,18] | Widespread applicability | The requirement for high-quality data |
| Fault Phase | Fault Switch Tube | Fault Value F |
|---|---|---|
| phase A | 21 | |
| 11 | ||
| phase B | 22 | |
| 12 | ||
| phase C | 23 | |
| 13 |
| Diagnosis Method | Time | Loading and Load-Shedding Status | Fault Location |
|---|---|---|---|
| GPCA | yes | yes | |
| PCA [21] | no | no | |
| Current deviation method | no | yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Sun, R.; Diao, N. Health Status Detection for Motor Drive Systems Based on Generalized-Layer-Added Principal Component Analysis. Mathematics 2024, 12, 1690. https://doi.org/10.3390/math12111690
Chen Q, Sun R, Diao N. Health Status Detection for Motor Drive Systems Based on Generalized-Layer-Added Principal Component Analysis. Mathematics. 2024; 12(11):1690. https://doi.org/10.3390/math12111690
Chicago/Turabian StyleChen, Qing, Ruiwang Sun, and Naizhe Diao. 2024. "Health Status Detection for Motor Drive Systems Based on Generalized-Layer-Added Principal Component Analysis" Mathematics 12, no. 11: 1690. https://doi.org/10.3390/math12111690
APA StyleChen, Q., Sun, R., & Diao, N. (2024). Health Status Detection for Motor Drive Systems Based on Generalized-Layer-Added Principal Component Analysis. Mathematics, 12(11), 1690. https://doi.org/10.3390/math12111690