Abstract
The seepage characteristics of clay core walls are crucial for the seepage safety of core rockfill dams, with the permeability coefficient in the unsaturated zone being nonlinear. To accurately determine the unsaturated seepage parameters in clay core rockfill dams, this paper first proposes an enhanced reptile search algorithm (ERSA) by applying three improvement strategies: Arnold’s cat chaotic map, nonlinear evolutionary factor, and adaptive Cauchy–Gaussian mutation with variable weight. Then, by integrating the ERSA with the unsaturated seepage finite element method, an inverse modeling approach is developed. This approach is applied to an actual rockfill dam with operational monitoring data to determine the unsaturated seepage parameters of the clay core. Results indicate that the ERSA outperforms the original RSA in test functions, and the calculation results of the seepage parameters determined through inversion are consistent with the monitoring data, showing an overall mean absolute error of 1.086 m. The inverse modeling approach provides a valuable reference for determining unsaturated seepage parameters in similar clay core rockfill dams.
Keywords:
reptile search algorithm; inverse modeling; clay core rockfill dam; saturated-unsaturated transient seepage; van Genuchten model MSC:
00A06
1. Introduction
Rockfill dams are a widely used type of dam, with clay core rockfill dams being a typical example of high rockfill dams [1]. Seepage control is crucial for the safety of earth rockfill dams [2]. Obtaining reliable and accurate seepage calculation parameters is essential for dam seepage safety assessment, and inverse modeling based on monitoring data serves as a vital approach to achieve this goal [3].
Due to the various material zones in earth rockfill dams, inverse analysis with multiple parameters presents a high-dimensional nonlinear problem. Introducing optimization algorithms is a promising solution and has become a major research focus. For instance, Qian et al. [4] proposed a simulation-optimization model based on an improved differential evolution algorithm (MMRDE) and the finite element software ADINA and used it to determine the hydraulic conductivity of the aquifer for the Lu Dila hydropower project. Song et al. [5] and Zhou et al. [6] independently introduced various improvements to the sparrow search algorithm for the inversion of core rockfill dams. Nan et al. [7] employed a multi-island genetic algorithm and considered the coupling of seepage and thermal processes during the inversion. Shi et al. [8] combined particle swarm optimization algorithm with support vector machine for seepage inversion of concrete face rockfill dam with cracks. Xiong et al. [9] developed a novel inversion method by integrating the dung beetle optimization algorithm with support vector regression. In addition to the aforementioned studies, many other researchers [10,11,12,13] have also applied various optimization algorithms and improvement strategies for the inversion of the permeability coefficient.
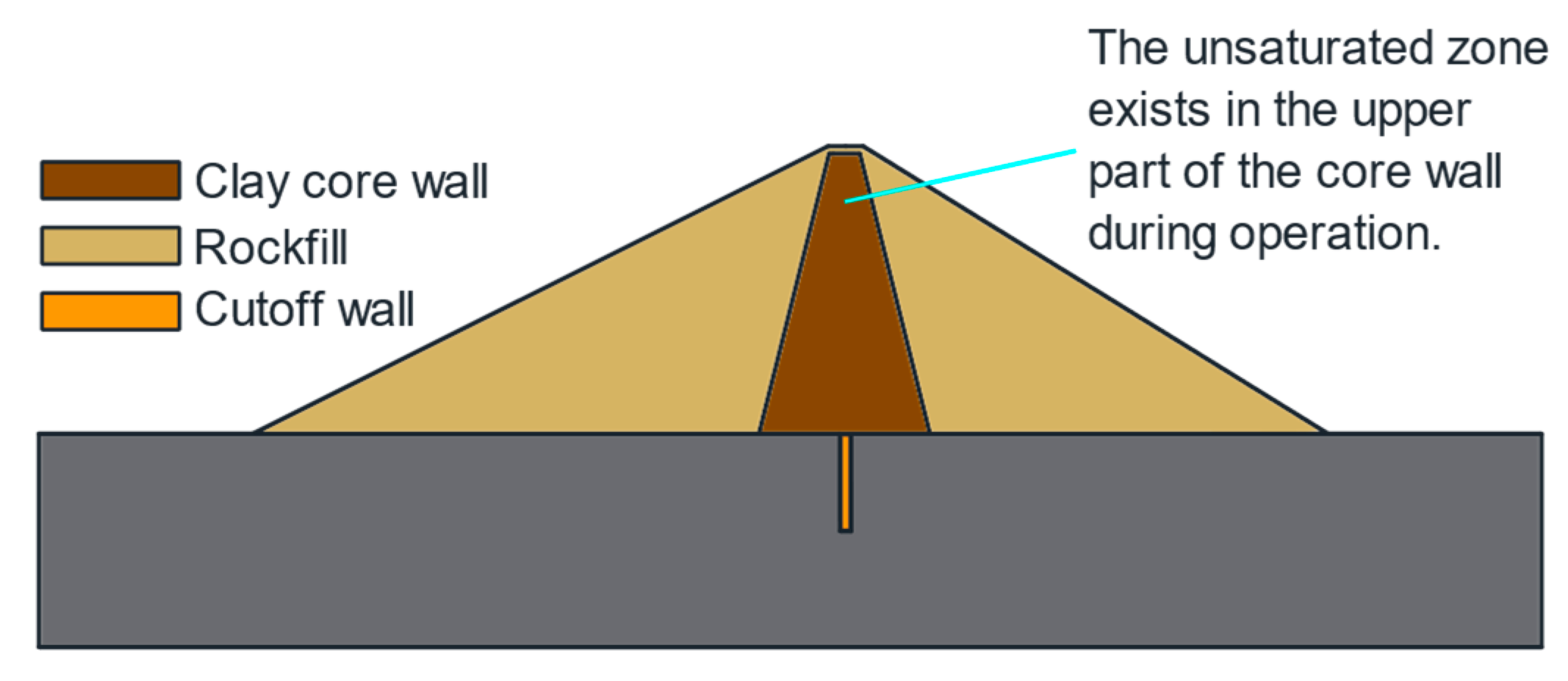
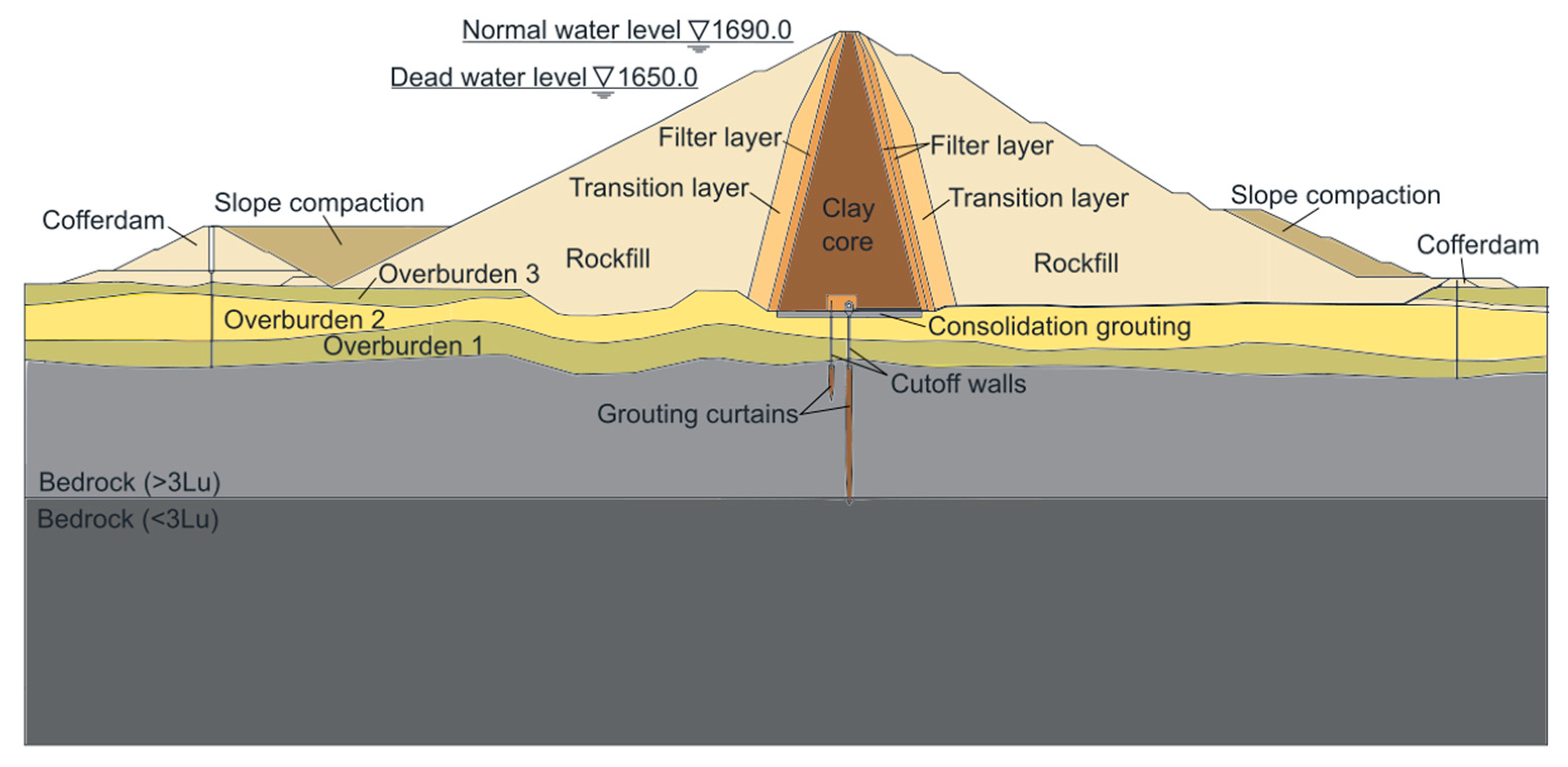
Most of the seepage parameter inversion studies focus primarily on determining the permeability coefficient, neglecting the unsaturated parameters. However, during the operation of dams, reservoir water levels fluctuate due to factors such as power generation and flood control, leading to continuous changes in the saturated–unsaturated regions within the dam body. Figure 1 presents a simplified cross-section diagram of clay core rockfill dams. Moreover, unsaturated parameters are often more difficult to determine experimentally than permeability coefficients. In the limited existing research, Xu and Wu [14] and Li et al. [15] used the elitist non-dominated sorting genetic algorithm (NSGA-II) to determine the unsaturated seepage parameters of the core wall in the PBG dam.
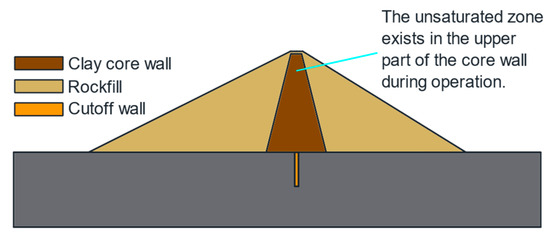
Figure 1.
Simplified cross-section diagram of clay core rockfill dams.
Among the recently proposed metaheuristic optimization algorithms, the reptile search algorithm (RSA) [16] introduced by Abualigah et al. in 2022 has demonstrated strong performance and has been successfully applied in various fields, including renewable energy, power systems, transportation, image processing, and machine learning [17]. Given the no-free-lunch theorem [18], some researchers have made modifications to the RSA to adapt it to different problems. For instance, Almotairi and Abualigah [19] utilized a mean transition mechanism to combine the conventional RSA with a mutation technique, proposing the IRSA, which was applied to constrained industrial engineering problems. Ding et al. [20] introduced the Levy flight strategy during the global search phase of an RSA and used it for fractional-order model identification of lithium batteries. Chauhan et al. [21] combined the RSA with differential evolution for the design of finite impulse response filters.
Based on the conventional reptile search algorithm (RSA), this study employs a series of improvement strategies to enhance its performance for unsaturated seepage inversion problem, resulting in the development of an enhanced reptile search algorithm (ERSA). The ERSA is then evaluated against the original RSA across several test functions. Following this, the ERSA is applied to the inversion of unsaturated seepage parameters in a clay core rockfill dam, utilizing operational period seepage monitoring data.
2. Enhanced Reptile Search Algorithm
2.1. Original Reptile Search Algorithm (RSA)
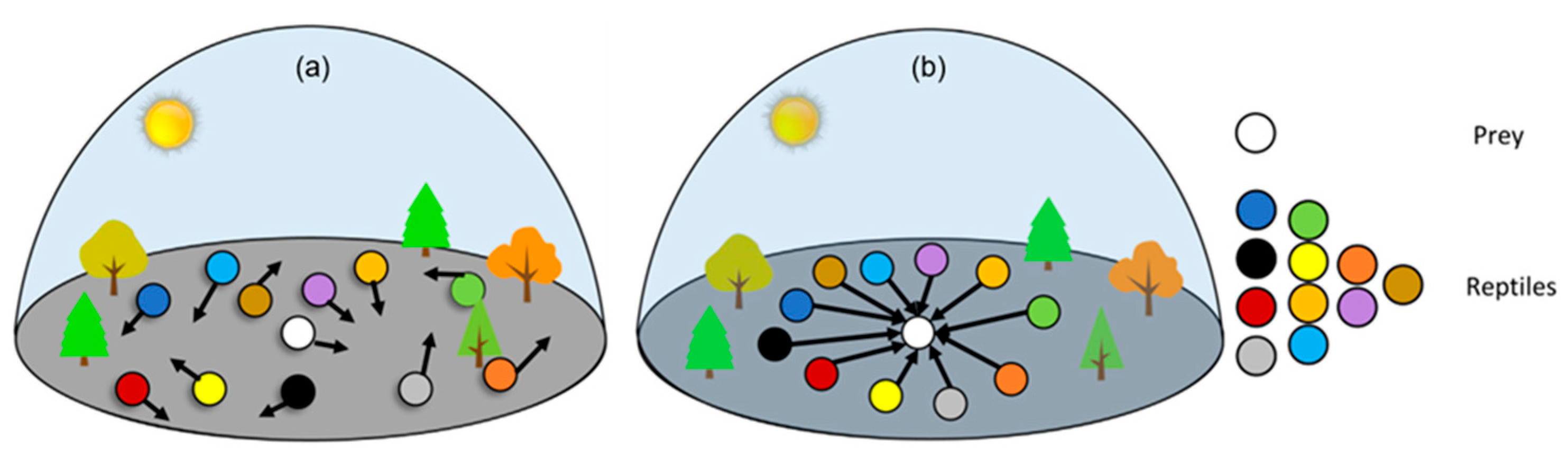
The reptile search algorithm (RSA) is a novel meta-heuristic optimizer introduced by Abualigah et al. in 2022 [16]. It is inspired by the encircling and hunting behaviors of crocodiles, as shown in Figure 2. More precisely, encircling behavior involves high walking and belly walking, while hunting behavior is characterized by coordination and cooperation strategies.
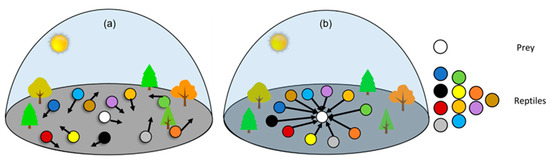
Figure 2.
Schematic diagram of crocodile behavior [16]: (a) encircling; (b) hunting.
In the mathematical model of the RSA, these behaviors are implemented by dividing the total number of iterations into four parts. First of all, the algorithm starts with a set of random candidate solutions generated by Equation (1):
where is the position of the i-th candidate solution in the j-th dimension, i = 1, 2, 3, …, N, j = 1, 2, 3, …, n; is a random number; and and are upper and lower bounds on the search domain.
After initialization, the algorithm begins to search for optimization. The mathematical models of crocodile hunting behaviors, including high walking, belly walking, hunting coordination, and hunting cooperation, are shown in Equations (2)–(5), respectively.
where is the iteratively generated next-generation candidate solution, t is the current number of iterations, and T is the maximum number of iterations; is the j-th dimension of the current optimal solution; is the hunting operator calculated by Equation (6), and β is the coefficient for controlling exploration accuracy; , calculated by Equation (7), is the reduce function for the search area; is the j-th dimension of the random candidate solution in the current iteration; is the evolutionary factor derived from Equation (8); is the difference between the current solution and the optimal solution determined by Equation (9); and is a small number to prevent the denominator of Equation (9) from being zero.
where and are random integers.
2.2. Strategies to Improve Original Reptile Search Algorithm
2.2.1. Arnold’s Cat Chaotic Map
For meta-heuristic optimizers, the distribution of the initial population significantly impacts the convergence speed and optimization accuracy [22,23,24]. Similarly to most algorithms, the reptile search algorithm employs randomly generated populations as an initial population. However, such initial populations generated by pseudo-random number generators exhibit low traversal properties in the analysis domain, leading to clustering in certain regions and consequently deteriorating algorithm performance. Sequences generated by chaotic mapping theory, on the other hand, possess greater randomness, traversal capability, and non-repetitiveness, and are thus widely utilized to enhance the quality of initial populations. Among them, Arnold’s cat chaotic map is a two-dimensional reversible chaotic map and generates relatively uniform chaotic numbers [25]. Therefore, we initialize the crocodile population using Arnold’s cat chaotic map, defined by Equation (10). It generates two chaotic sequences, denoted and . Here, is selected to replace the in Equation (1).
2.2.2. Nonlinear Evolutionary Factor
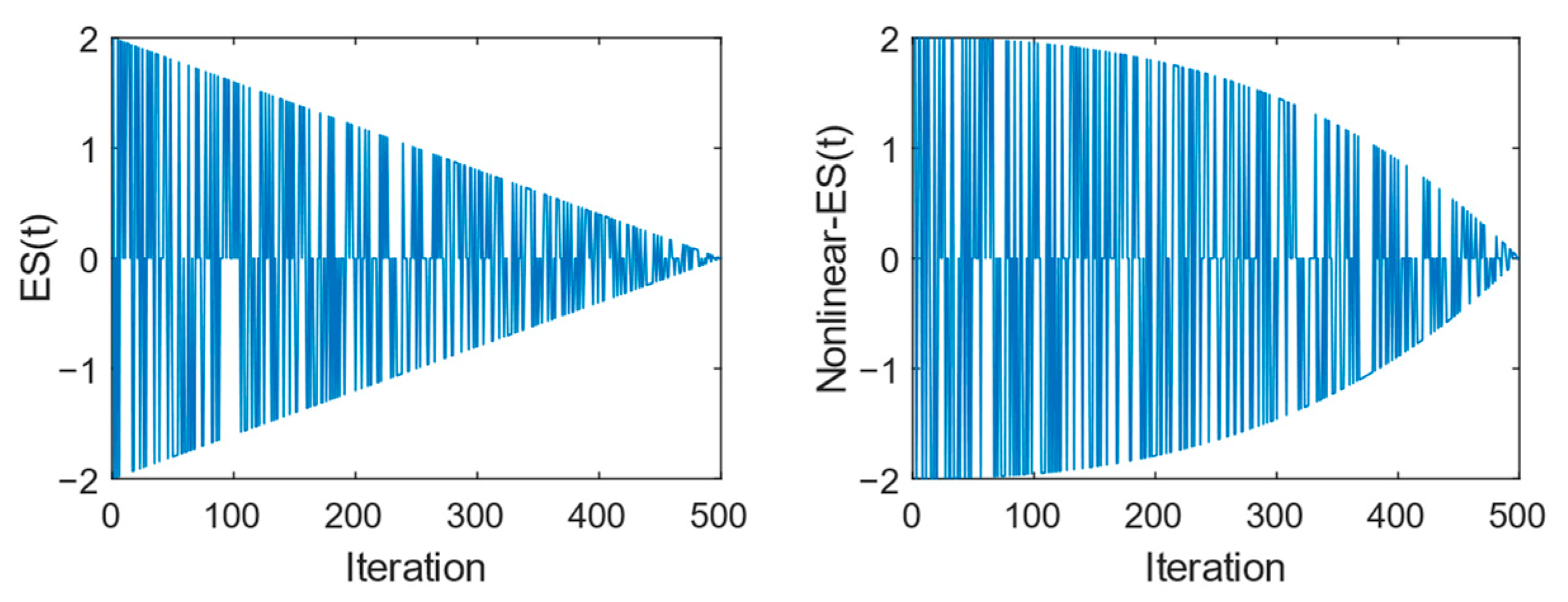
The parameter is used to control the belly walking strategy during a global encircling search in the algorithm. The extent of oscillation in will determine its exploration and exploitation capabilities. Linearly decreasing can lead to lower optimization accuracy when facing complex and variable nonlinear functions. Therefore, a nonlinearly decreasing is introduced as follows. Figure 3 illustrates the trend of the original and the improved .
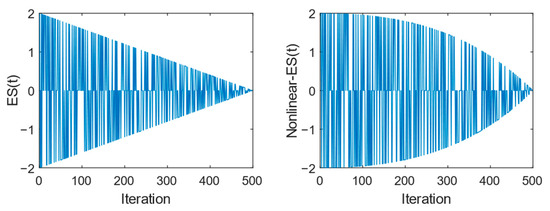
Figure 3.
Comparison chart between original ES(t) and nonlinear ES(t).
2.2.3. Adaptive Cauchy–Gaussian Mutation with Variable Weight
In the original RSA, all four iteration formulas update positions based on the current best individual, which can easily lead to population convergence and getting stuck in local optima. Therefore, an adaptive Cauchy–Gaussian mutation is introduced. The Cauchy distribution probability density function and Gaussian distribution probability density function formulas are as follows:
where is the location parameter, which indicates the peak of the Cauchy distribution; is the scale parameter, which determines the half width at half maximum of the peak; is the mean of the distribution, which represents the peak of the Gaussian distribution; and is the standard deviation, which measures the spread or width of the distribution.
The characteristics of the Cauchy distribution include a lower peak and a wider distribution range, which reduce the influence of local optima after Cauchy mutation. On the other hand, the Gaussian distribution has a higher peak and narrower range, endowing mutated individuals with better local exploitation capabilities. During the encircling phase, especially in the high-walking phase, a larger search step is taken to traverse the entire search space. At this time, greater weight is given to the Cauchy mutation, enabling a more comprehensive exploration of the entire search space to avoid being trapped in local optima. During the hunting phase, when the population approaches potential global optimal positions, a greater weight is assigned to the Gaussian mutation. This facilitates fine exploration of local regions where the global optimal positions may exist, thus enhancing optimization accuracy. The specific adaptive Cauchy–Gaussian mutation formula is proposed as follows:
where is the individual after mutation and is the weight to Cauchy mutation.
2.3. Performance Testing and Comparison of ERSA
The proposed improvement strategies are implemented based on the open-source MATLAB code of the RSA with MATLAB 2021b. Performance testing and comparisons in this section were conducted on a desktop PC equipped with an AMD Ryzen™ 7 5700X processor (AMD, Santa Clara, CA, USA) and 16 GB of 3200 MHz memory.
Six test functions [26] are selected, as shown in Table 1. This selection includes two unimodal test functions for evaluating algorithm convergence performance, two multimodal test functions for assessing the algorithm’s ability to escape local optima, and two fixed-dimension multimodal functions. When compared to other algorithms, the original RSA was shown to exhibit superior performance in the initial RSA publication [16]. Hence, our comparisons focus on the improvements over the original RSA. To evaluate the effectiveness of the three proposed improvement strategies, each strategy individually applied to the original RSA is tested. Additionally, the ERSA incorporating all three improvement strategies simultaneously is also tested. The names of the algorithms tested and their corresponding improvement strategies are listed in Table 2.

Table 1.
Test functions.
Table 2.
Tested algorithms.
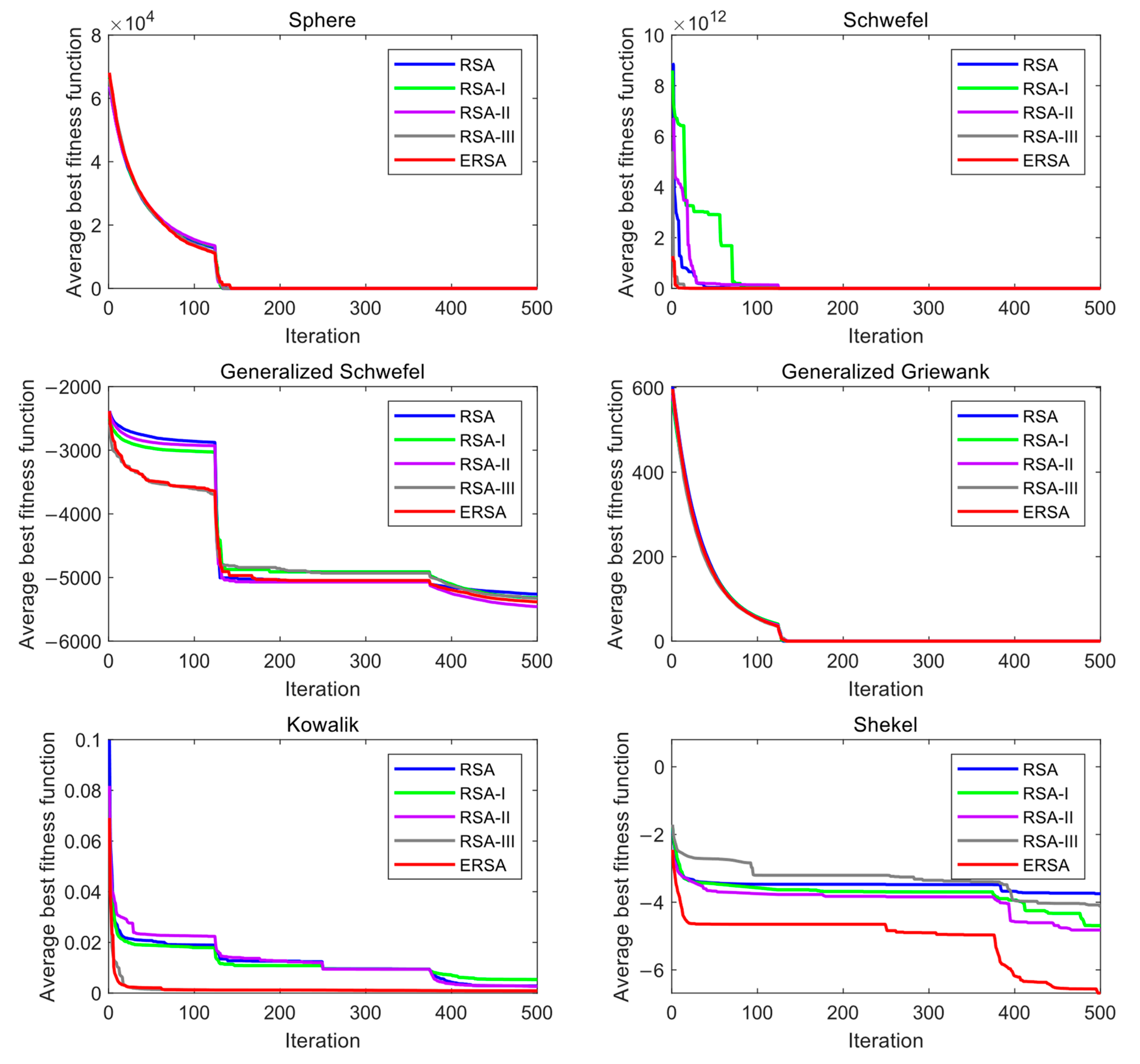
The algorithm parameters are set as follows: α is set to 0.1, β is set to 0.005, the population size of crocodiles is 30, and the total number of iterations is 500. Additionally, the optimization results exhibit some randomness due to the presence of the random variable in the algorithm’s mathematical model. Therefore, the optimization process is independently conducted 25 times and the averages of the results are compared, as presented in Table 3. The average convergence curves from the 25 calculations are illustrated in Figure 4.
Table 3.
Average results of 25 calculations.
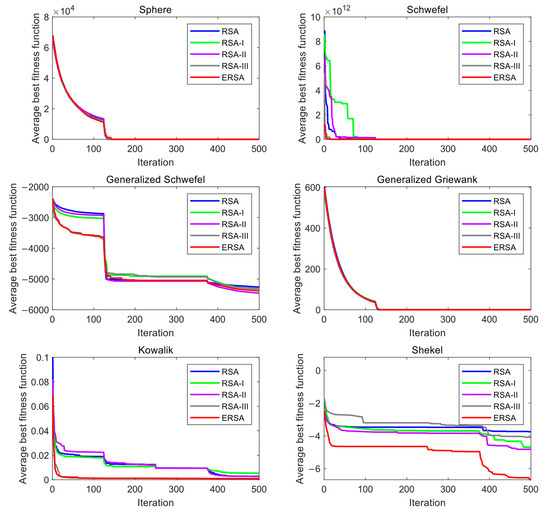
Figure 4.
Average iteration convergence curve of 25 calculations.
Abrupt points can be observed in the convergence curves of Figure 4. These abrupt points can be attributed to several factors. First, the RSA model is divided into four stages based on the total number of iterations. As iterations progress, transitions occur between these four stages, causing noticeable changes in the convergence curve at these transition points. This phenomenon is most prominent in the Kowalik test function. Second, each stage of the mathematical model includes random parameters. If random changes lead to the discovery of better solutions, abrupt changes may occur within the same stage. Finally, for the ERSA using the adaptive Cauchy–Gaussian mutation with variable weight, similar abrupt changes can be observed during the mutation process when improved solutions are discovered.
Based on Table 3, it can be observed that RSA-I, which employs Arnold’s cat chaotic map, outperforms or equals the original RSA in the final results of five test functions, except for the Kowalik test function, where it underperforms compared to the original RSA. This suggests that the chaotic map improvement strategy leads to a more uniform distribution of the initial solutions, thereby effectively enhancing the final convergence accuracy. RSA-II, which uses the nonlinear evolutionary factor, and RSA-III, which employs adaptive Cauchy–Gaussian mutation with variable weight, both outperform or equal the original RSA across all test functions, demonstrating the effectiveness of these two strategies. As seen in Figure 4, the convergence speeds of these three variants have advantages and disadvantages compared to the original algorithm.
The ERSA proposed in this study, which simultaneously employs all three improvement strategies, achieves the best final results among all tested algorithms in five test functions, only falling short to RSA-II in the generalized Schwefel function. As described by the no-free-lunch theorem, no single algorithm can perform best across all types of problems. However, overall, the ERSA exhibits the fastest convergence and the highest convergence accuracy. For unimodal test functions, all algorithms eventually converge to the optimal solution, but the ERSA converges faster. For multimodal and fixed-dimension test functions, the ERSA results are closer to the optimal solution, and the convergence curve continues to approach the optimal solution in the later iterations, indicating the significant role of the mutation strategy.
3. Unsaturated Seepage Parameter Inverse Modeling Approach
3.1. Unsaturated Seepage Theory
The computation of seepage flow in rockfill dams involves a saturated–unsaturated problem. The saturated seepage zone can be calculated using Darcy’s law, where the permeability coefficient of the soil is typically assumed to be constant. However, in the unsaturated seepage zone, the permeability coefficient of the soil is not constant, but a function of water content, rendering the problem highly nonlinear. The Richards equation [27] is employed to describe the unsaturated seepage field, as shown below.
where is the density of water; is the water capacity of soil; is the gravitational acceleration; is the effective degree of saturation, , and , , are volumetric water content, residual water content, and saturated water content, respectively; is the water storage coefficient; is the pressure head, and is the time; is the Nabla operator; is the saturated permeability, and is the relative permeability of unsaturated soil; is the dynamic viscosity of water; is the depth; and is the source and sink of seepage.
A soil–water characteristic curve (SWCC) is employed to describe the seepage characteristics of unsaturated soil. The van Genuchten empirical formula model exhibits high fitting accuracy, with parameters possessing clear physical meanings, and thus finds wide application in the analysis of unsaturated seepage in rockfill dams [28,29,30,31]. The van Genuchten model combined with the Mualem model is defined as follows [32]:
where , and are fitting parameters, and ; is the water pressure head.
Based on the aforementioned seepage theory, a self-developed finite element program for seepage analysis was created and applied in the subsequent calculations of this study. This program has been used in numerous engineering seepage calculations and has yielded satisfactory results [9].
3.2. Inversion Objects
For an operating clay core rockfill dam, the installed piezometers are limited in number and fixed in location, posing difficulties in fully capturing the unsaturated zone’s characteristics. However, accounting for dynamic variations in reservoir water levels arising from seasonal changes and power generation demands, the unsaturated zone of the dam undergoes corresponding changes. This variability results in piezometers being situated at different positions within the unsaturated zone, facilitating a more comprehensive inversion of unsaturated seepage parameters. Therefore, the inverse modeling of unsaturated seepage parameters is conducted based on the transient unsaturated seepage calculation and piezometer monitoring data under dynamic changes in reservoir water level.
In routine operations, barring emergencies or exceptional circumstances, the reservoir water level oscillates between the dead water level and the normal storage level. In the case of long-standing rockfill dams, the foundation below the downstream water level typically remains saturated. Furthermore, the rockfill region, critical for dam stability, features larger particles (up to 600 mm for the clay core rockfill dam studied in this research) and a permeability coefficient significantly different from that of the clay core (a difference of five orders of magnitude). As a result, this region does not function as a seepage barrier, with the infiltration line typically aligning with upstream and downstream water levels. Therefore, this study focuses on the inversion of parameters for the clay core above the foundation, primarily serving as the primary impermeable barrier. Specifically, attention is directed towards determining the saturated permeability coefficient of the clay core and parameters in the van Genuchten model, while other areas are assigned design values or rely on engineering analogies.
An objective function is constructed by summing the squared differences between the monitored actual values and the computed values, as depicted in Equation (19). Subsequently, the inversion problem is reformulated into an optimization task aimed at minimizing Equation (19), with the intervention of the enhanced reptile search algorithm.
where and are the total number of piezometers and analysis moments, respectively, is the computed water head of the j-th analysis moment at the i-th piezometer, and is the monitored water head.
3.3. Procedure of Inverse Modeling
The ERSA iteratively combines with finite element calculations in finite element programs for optimization. Despite the numerous scholars adopting various surrogate models such as the response surface method [33,34], support vector regression [9,10], and extreme learning machine [2,15], to replace finite element calculations in the optimization process, aiming to improve optimization efficiency, it is worth considering that the preparation work before optimization, including coding the surrogate model, training and validating samples for FEM calculations, and fine-tuning the surrogate model to the required accuracy, also consumes a significant amount of time. Moreover, the accuracy of surrogate models, no matter how high, cannot surpass that of direct computation. Therefore, this study directly conducts ERSA-based optimization on the foundation of finite element calculations.
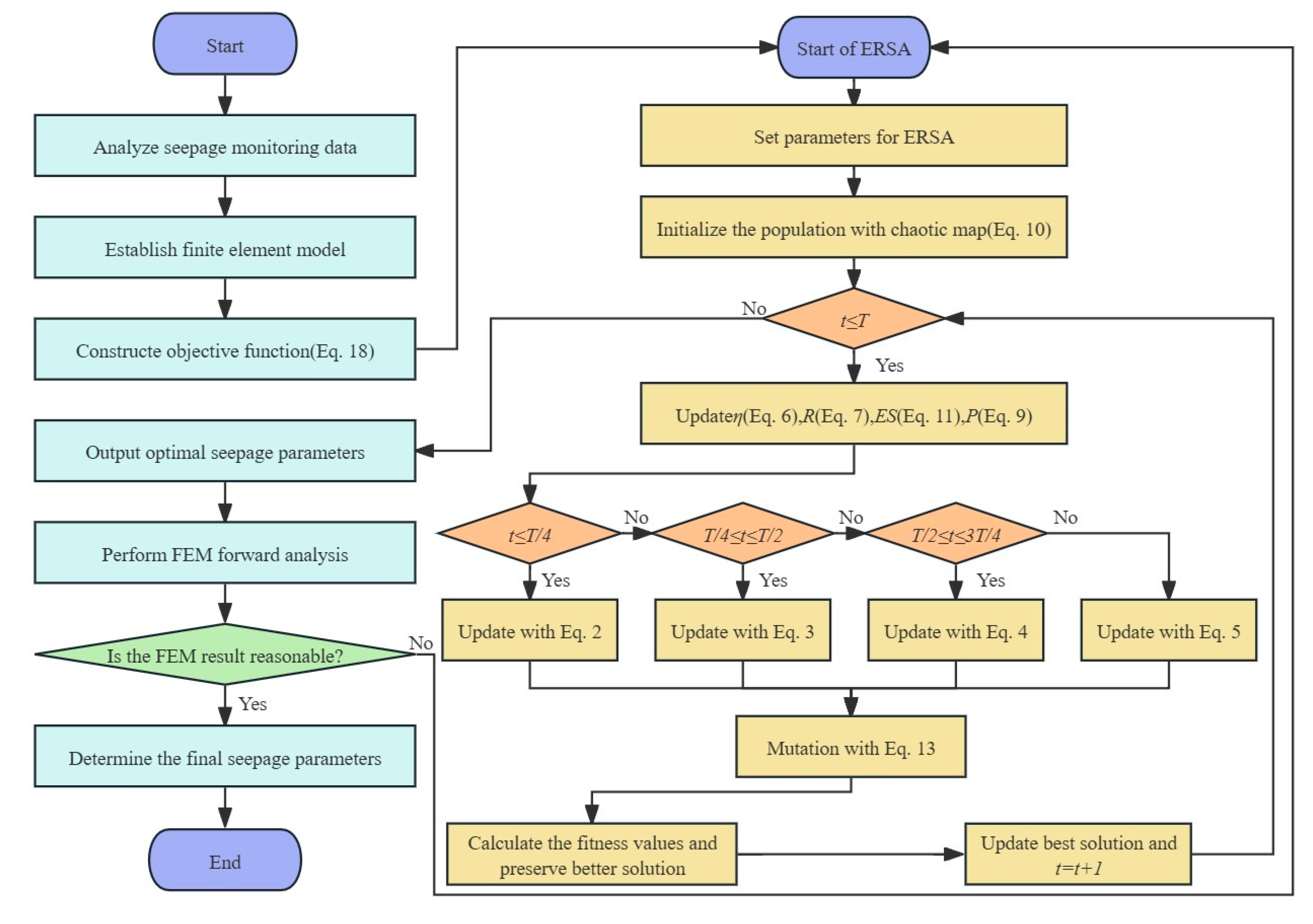
The procedure of inverse modeling of unsaturated seepage parameters in a clay core rockfill dam based on the enhanced reptile search algorithm and monitoring data during the operation period is outlined below. Additionally, Figure 5 presents the corresponding flowchart.
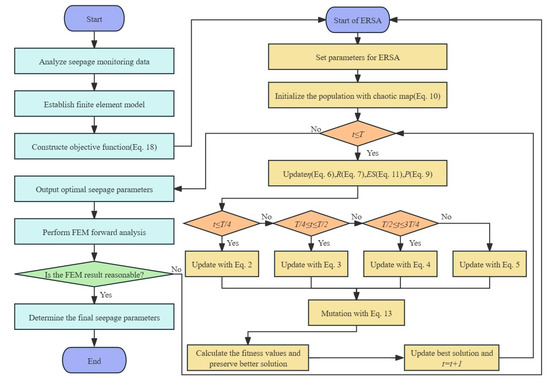
Figure 5.
Flowchart of inverse modeling.
Step 1: Analyze the seepage monitoring data of the dam to determine the inversion analysis period and validation period. Based on the dam’s design data, establish a finite element model.
Step 2: Initialization for ERSA. Determine the parameters α and β, the population size of crocodiles, and the total number of iterations. Utilize Arnold’s cat chaotic map (Equation (10)) to generate the initial population, ensuring a uniform distribution within the solution domain. Simultaneously, calculate the fitness of the initial population.
Step 3: Iteration with mutation. Utilize Equations (2)–(5) for population iteration, while implementing adaptive Cauchy–Gaussian mutation. Calculate the corresponding fitness, compare, and update the optimal fitness and position.
Step 4: Iteration judgment: If the iteration count has not reached the maximum iteration limit, proceed to Step 3. Otherwise, output the optimal fitness and position. At this point, the outputted optimal position represents the seepage parameter combination obtained from the inversion optimization.
Step 5: Forward analysis. Utilize the seepage parameters obtained from the inversion to conduct finite element forward calculations. If the forward calculation results are reasonable and match the monitoring data, this indicates the rationality of the inversion results and allows for the analysis of the current seepage status of the dam. Otherwise, return to Step 2.
4. Engineering Application
4.1. Overview of a Clay Core Rockfill Dam
The Sichuan CHB hydropower project is situated on the main stream of the Dadu River. Primarily focused on power generation, it governs a drainage area of 56,648 km2 and boasts a total installed capacity of 2600 MW. Below the normal storage level of 1690 m, the reservoir possesses a seasonal regulation capacity of 1.015 × 109 m3. The hydrojunction comprises a 240 m-high clay core rockfill dam, an underground water diversion system, and a power generation system. A typical cross section of the dam is depicted in Figure 6.
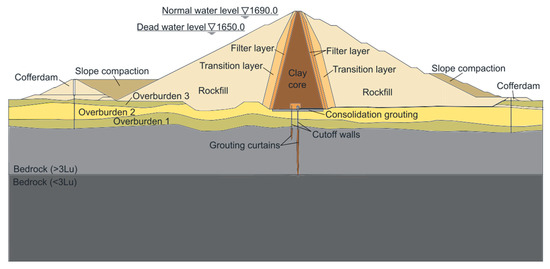
Figure 6.
Typical cross-section diagram of the studied dam.
4.2. Seepage Monitoring Data Analysis
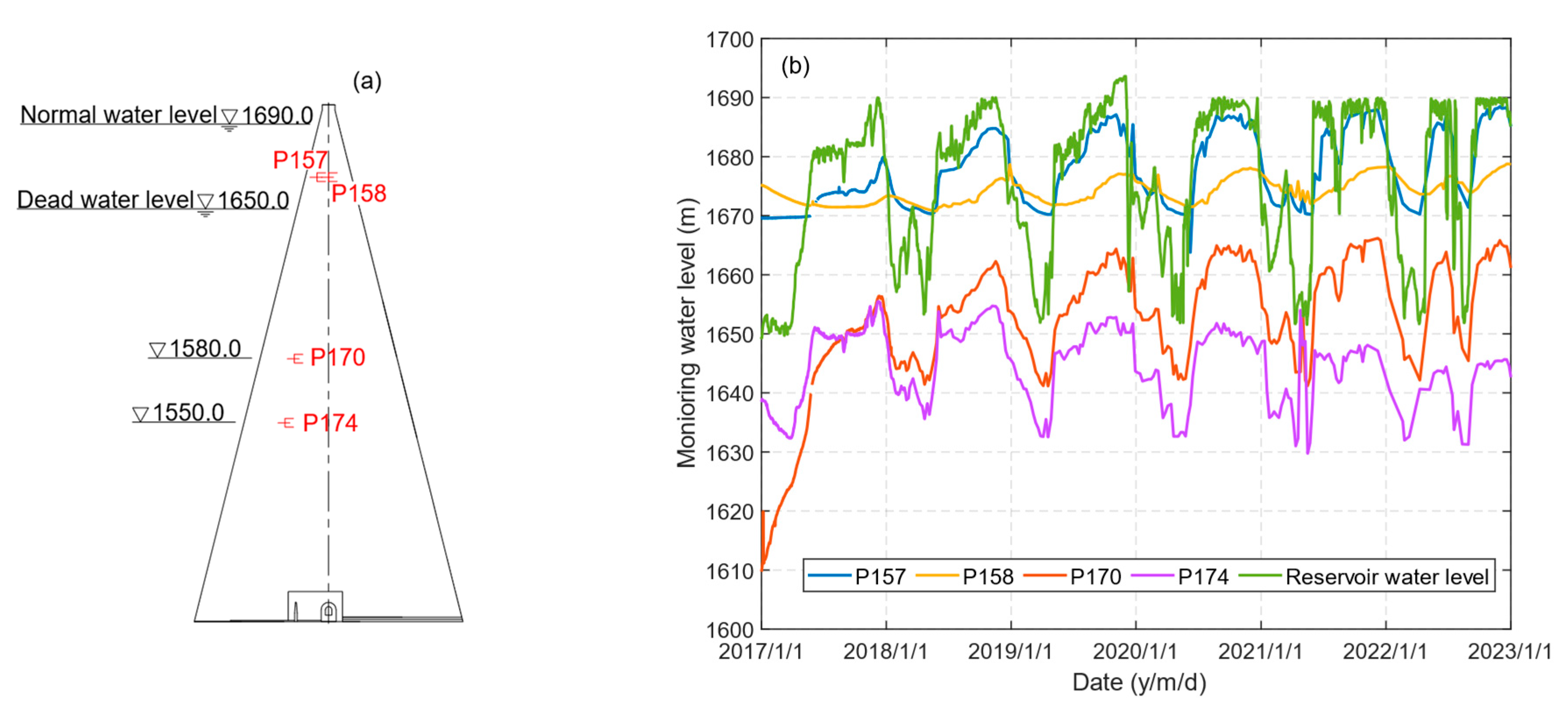
Since the impoundment of the dam, several piezometers have transmitted continuous and well-patterned seepage monitoring data up to the present operational period. Their locations are depicted in Figure 7a. The seepage monitoring data from the completion of impoundment to the end of 2022 are illustrated in Figure 7b, where the data represent the total hydraulic head at each measurement point for comparison with the reservoir water level.
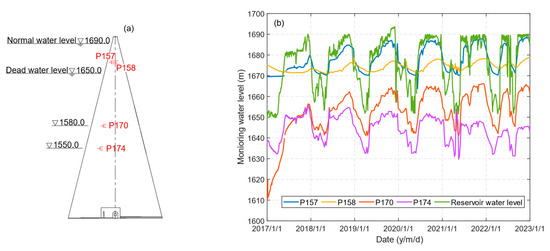
Figure 7.
(a) Location of piezometers; (b) hydraulic head monitoring data.
It can be observed that in the case of rapid decreases in reservoir water level, the rate of decrease in the piezometer readings within the area of reservoir water level change is notably lower than the rate of decrease in reservoir water level. At this time, a positive pressure zone persists within the core wall above the reservoir water level, indicating that the infiltration surface inside the core wall is higher than the reservoir water level. The water within the upstream side of the core wall in this region will exert seepage force directed towards the upstream direction, posing a threat to the stability of the upstream slope of the dam. Clearly, the higher the infiltration surface is relative to the reservoir water level, the stronger this seepage force becomes, and while the water level rises, a significant seepage gradient occurs in the upstream side of the core wall, which adversely affects the seepage stability. Therefore, it is crucial to determine the actual unsaturated seepage parameters through inversion analysis to calculate the transient unsaturated seepage field during the dynamic change in reservoir water level.
4.3. Inverse Modeling of Saturated–Unsaturated Transient Seepage
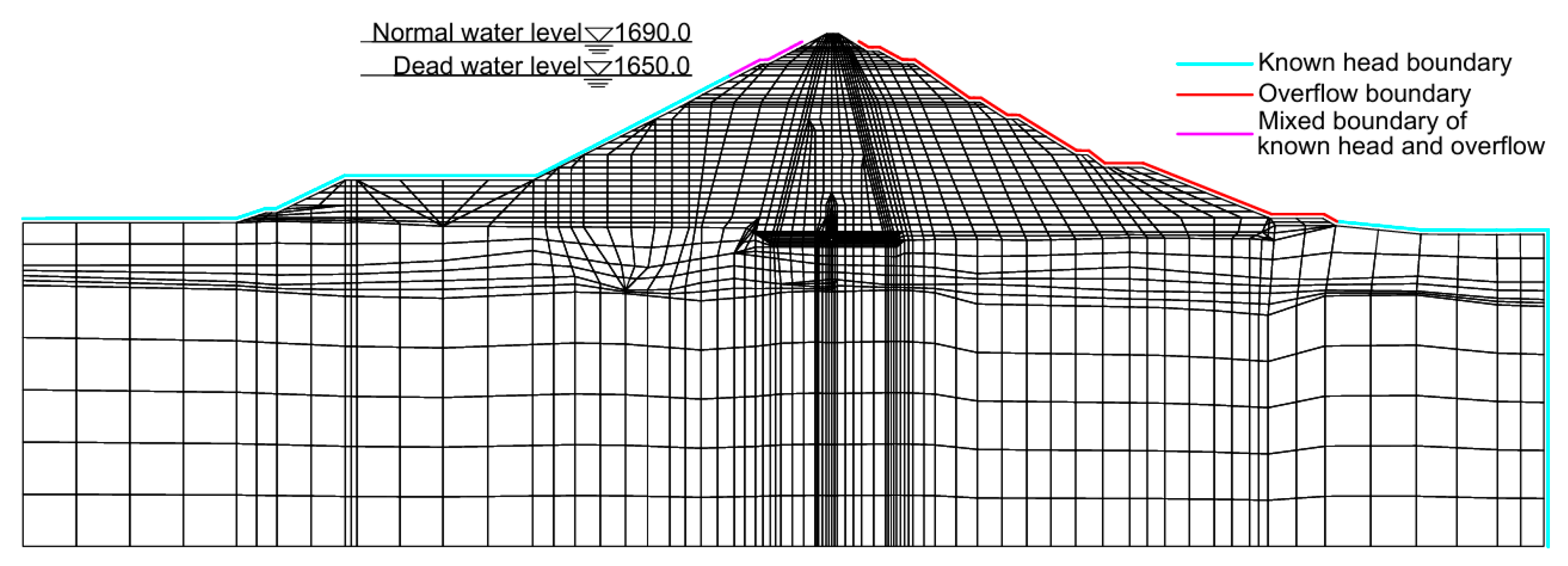
A two-dimensional finite element model of a typical cross section of the dam along the river centerline was established, as shown in Figure 8. The model contains 23,492 nodes and 11,555 elements. Figure 8 simultaneously shows the boundary condition settings. It should be noted that the model boundary between the normal water level and the dead water level is set as a mixed boundary, because this part of the boundary will switch between the known head boundary and the overflow boundary as the reservoir water level rises and falls. The design values of the permeability coefficients for each material zone in the model are shown in Table 4.
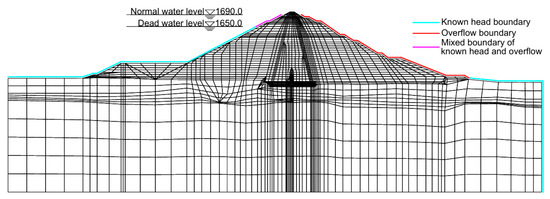
Figure 8.
Finite element model and boundary conditions.
Table 4.
Design values of permeability coefficient (cm/s).
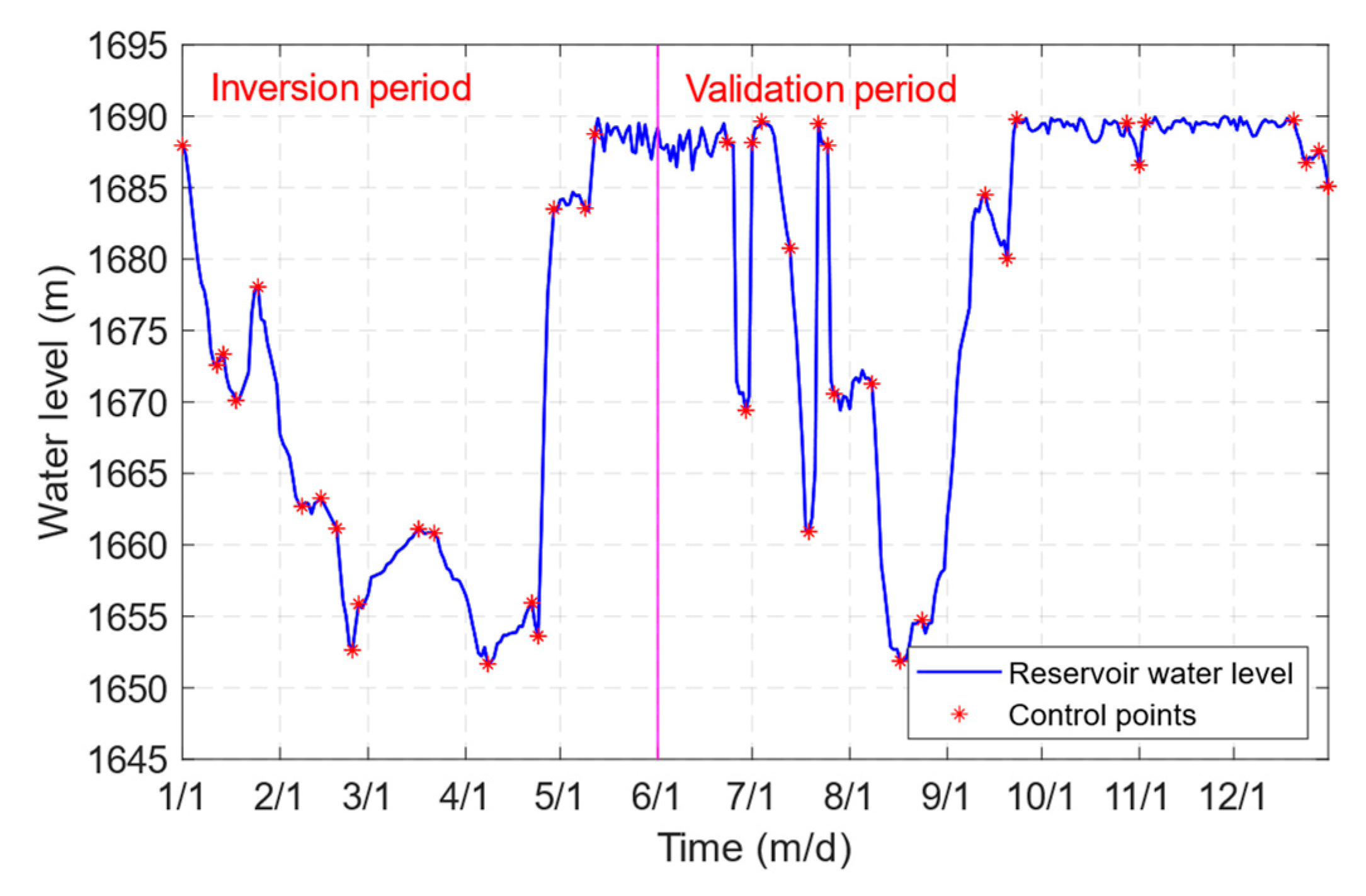
The entire year of 2022 is selected as the inversion and validation period for transient unsaturated seepage calculation, as shown in Figure 9. Figure 9 also shows the selection of upstream water level control points in the finite element calculation process. The period from 1 January to 31 May is the fitting monitoring data period for inverse modeling, and the period from 1 June to 31 December is the validation period, used to compare the error between the finite element calculation results of the inversion parameters and the monitored data. Both periods include the process of the reservoir water level decreasing from high to low and then rising back to high. Since the downstream water level exhibits minor variations throughout the year and has a minimal impact on the seepage field in the upper part of the core wall, it was set at a constant value of 1477.88 m (the average downstream water level in 2022).
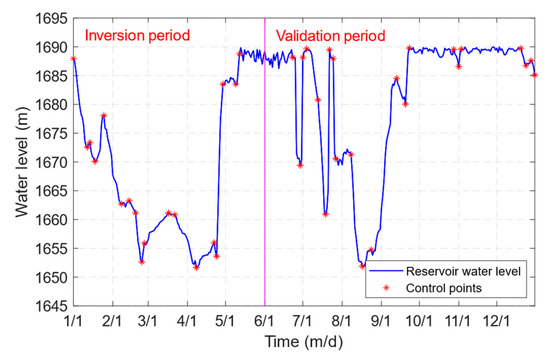
Figure 9.
Reservoir water level curve of 2022 and calculation control points.
The inversion ranges for the saturated permeability coefficient ks and the van Genuchten model parameters α and n of the core wall are set to 5.00 × 10−7 to 5.00 × 10−5, 0.001 to 0.1, and 1 to 4, respectively. The population size for the ERSA is set to 30, and the number of iterations is set to 100.
4.4. Results and Discussion of the Inverse Modeling
The seepage parameters obtained through ERSA inverse modeling are shown in the Table 5. The inversion results are all within the search range and do not reach the upper or lower limits. Additionally, when compared with other projects, the obtained parameters conform to the general characteristics of clay core wall materials.
Table 5.
Inverse modeling results for unsaturated seepage parameters.
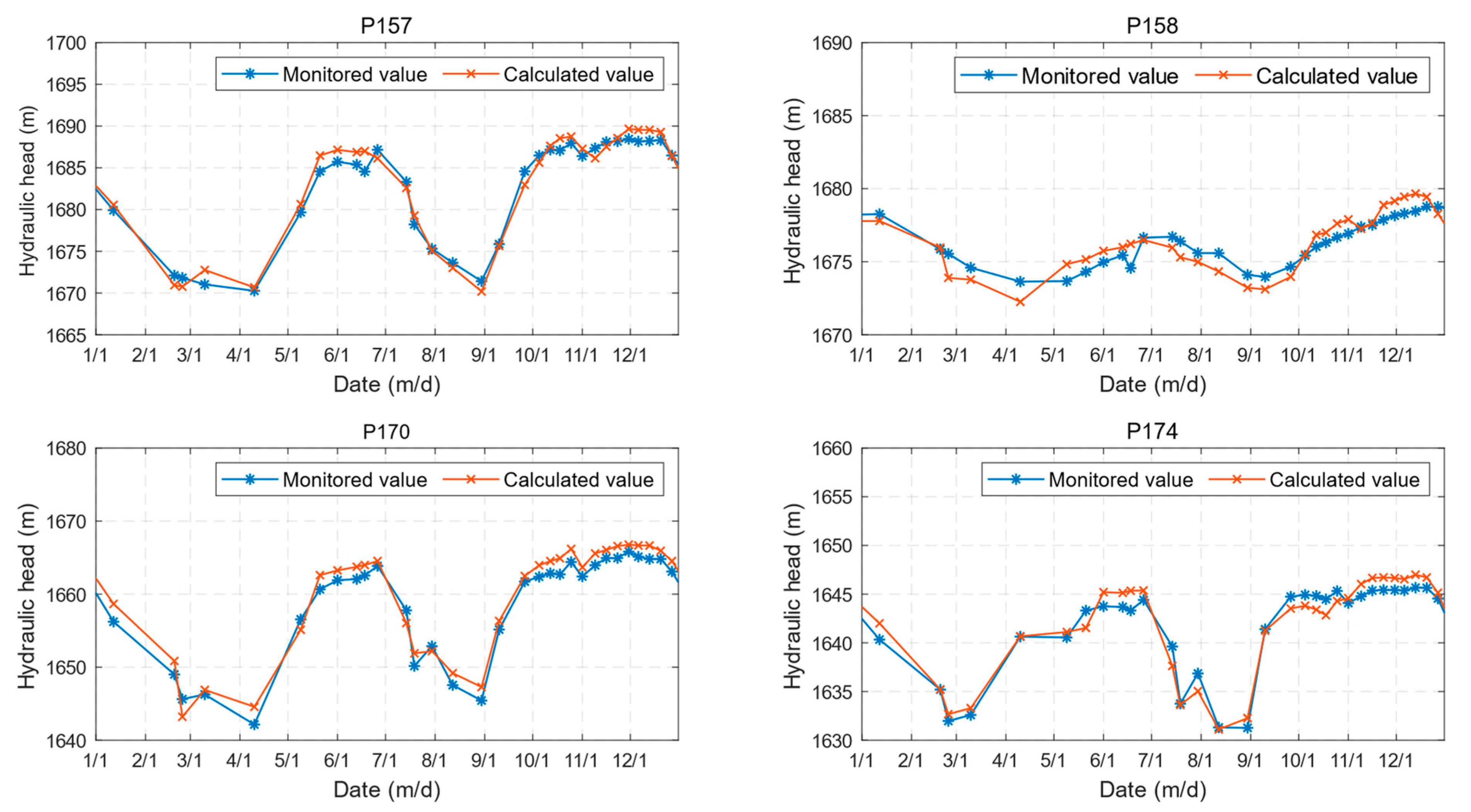
Based on the determined inversion parameters, the finite element method is used to simulate the changes in the dam’s seepage field throughout the reservoir water level fluctuations in 2022. The comparison curves of calculated values and measured values at various piezometer locations over time are illustrated in Figure 10. Additionally, the root mean square error (RMSE), mean absolute error (MAE), and mean absolute percentage error (MAPE) between the calculated and measured values are calculated, as shown in Table 6. The calculated values during both the inversion and validation periods closely match the monitoring data, with relatively small errors, meeting the requirements for engineering applications.
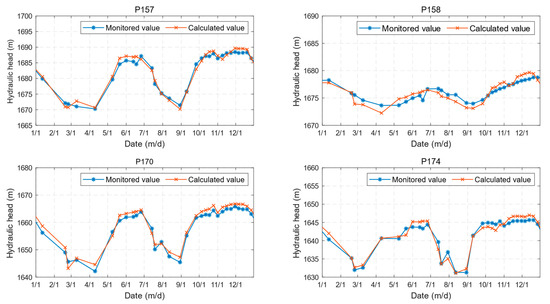
Figure 10.
Comparison between calculated and monitored hydraulic head.
Table 6.
Error analysis between the calculated and measured values.
The inverse modeling approach proposed in this paper has yielded reasonable unsaturated seepage parameters in the engineering application of the core rockfill dam, and the FEM-calculated results are consistent with the actual monitoring. In fact, there is some variability within the same material zone of the dam, especially for rolled rockfill dams. This inverse modeling approach can be used to study the complexity of the engineering structure and the variability in dam material properties. However, in future studies, the sensitivity of the results to changes in the input parameters of the finite element model may need to be investigated first, as this may impair the approach’s robustness.
5. Conclusions
An enhanced reptile search algorithm (ERSA) is introduced in this paper, incorporating three key improvements over the original reptile search algorithm: Arnold’s cat chaotic map, nonlinear evolutionary factor, and adaptive Cauchy–Gaussian mutation with variable weight. The algorithm’s efficacy is evaluated across multiple test functions. Subsequently, an inverse modeling approach based on the ERSA is proposed for accurately determining unsaturated seepage parameters of clay core walls in rockfill dams. Finally, this methodology is applied to a real-world case study involving a clay core rockfill dam. This study yields the following conclusions.
- (1)
- After implementing the three improvement strategies, the ERSA’s performance has been significantly enhanced. The introduction of Arnold’s cat chaotic mapping has resulted in a more uniformly distributed initial population. The use of a nonlinear evolutionary factor has improved the algorithm’s performance on nonlinear problems. Additionally, the adaptive Cauchy–Gaussian mutation with variable weight has allowed the algorithm to explore the entire search space more effectively in the early stages and avoid local optima in the later stages. The results of the test functions demonstrate that the ERSA shows varying degrees of improvement compared to the original version.
- (2)
- An inverse modeling approach is proposed by integrating the ERSA with the finite element method for unsaturated seepage. The unsaturated seepage characteristics are modeled using the van Genuchten model, with the primary inversion objects being the saturated permeability coefficient ks, and the parameters α and n from the van Genuchten model.
- (3)
- The inverse modeling approach based on the ERSA has demonstrated good performance in the engineering application. The calculated hydraulic head values, determined through inversion, closely match the observed trends and values from piezometer measurements. The overall RMSE between the calculated and monitored values is 1.184 m, the MAE is 1.086 m, and the MAPE is 0.065%.
Author Contributions
Conceptualization, Z.H.; data curation, Z.H. and Z.S.; formal analysis, Z.H. and L.X.; funding acquisition, Z.S.; investigation, Z.H. and L.X.; methodology, Z.H.; project administration, Z.S. and Y.S.; resources, Z.S.; software, Z.S.; supervision, Z.S. and Y.S.; validation, Z.H. and L.X.; visualization, Z.H. and L.X.; writing—original draft, Z.H.; writing—review and editing, Z.H. and Y.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (grant 52179130) and the Modern Multimodal Transportation Laboratory Open Fund Project (grant MTF2023010).
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
The authors gratefully acknowledge the support of the National Natural Science Foundation of China and the Key Laboratory of Transport Industry of Comprehensive Transportation Theory.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhang, H.; Jing, Y.; Chen, J.; Gao, Z.; Xu, Y. Characteristics and causes of crest cracking on a high core-wall rockfill dam: A case study. Eng. Geol. 2022, 297, 106488. [Google Scholar] [CrossRef]
- Liu, B.; Cen, W.; Zheng, C.; Li, D.; Wang, L. A combined optimization prediction model for earth-rock dam seepage pressure using multi-machine learning fusion with decomposition data-driven. Expert Syst. Appl. 2024, 242, 122798. [Google Scholar] [CrossRef]
- Gan, L.; Chen, G.; Shen, Z. A New Approach to Permeability Inversion of Fractured Rock Masses and Its Engineering Application. Water 2020, 12, 734. [Google Scholar] [CrossRef]
- Qian, W.W.; Chai, J.R.; Qin, Y.; Xu, Z.G. Simulation-optimization model for estimating hydraulic conductivity: A numerical case study of the Lu Dila hydropower station in China. Hydrogeol. J. 2019, 27, 2595–2616. [Google Scholar] [CrossRef]
- Song, J.; Yuan, S.; Xu, Z.; Li, X. Fast inversion method for seepage parameters of core earth-rock dam based on LHS-SSA-MKELM fusion surrogate model. Structures 2023, 55, 160–168. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, C.; Pang, R.; Li, Y.; Xu, Y.; Chen, J. A new approach for seepage parameter inversion of earth–rockfill dams based on an improved sparrow search algorithm. Comput. Geotech. 2024, 167, 106036. [Google Scholar] [CrossRef]
- Nan, S.; Ren, J.; Ma, Z.; Kang, J.; Sui, J. Inversion of the Seepage Parameters of Earth/Rockfill Dams Considering the Coupling Effect of Seepage and Thermal Transfer. Comput. Geotech. 2024, 165, 105882. [Google Scholar] [CrossRef]
- Shi, Z.W.; Wu, Z.R.; Gu, C.S.; Chen, B.; Zhang, H.L.; Yin, W.Z.; Wu, B.B. Calculation Methods for the Permeability Coefficient of Concrete Face Rockfill Dam with Cracks. Adv. Civ. Eng. 2019, 2019, 13. [Google Scholar] [CrossRef]
- Xiong, H.; Shen, Z.; Li, Y.; Sun, Y. A Novel Inversion Method for Permeability Coefficients of Concrete Face Rockfill Dam Based on Sobol-IDBO-SVR Fusion Surrogate Model. Mathematics 2024, 12, 1066. [Google Scholar] [CrossRef]
- Fei, T.; Zhang, A.A.; Jie, Y.; Lin, C. Inversion analysis of rock mass permeability coefficient of dam engineering based on particle swarm optimization and support vector machine: A case study. Measurement 2023, 221, 15. [Google Scholar] [CrossRef]
- Qian, W.W.; Chai, J.R.; Zhao, X.Y.; Niu, J.T.; Xiao, F.; Deng, Z.P. Inversion method of hydraulic conductivity for steady-state problem based on reduced-order model constructed by improved greedy sampling method. Adv. Water Resour. 2022, 166, 13. [Google Scholar] [CrossRef]
- Yue, X.P.; Wang, Y.K.; Wen, T. An Inversion Study of Reservoir Colluvial Landslide Permeability Coefficient by Combining Physical Model and Data-Driven Models. Water 2024, 16, 14. [Google Scholar] [CrossRef]
- Wang, J.X.; Sun, J.; Kou, H.J.; Lin, Y.X. Multiparameter Inversion Early Warning System of Tunnel Stress-Seepage Coupling Based on IA-BP Algorithm. Adv. Civ. Eng. 2021, 2021, 19. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z. Parameter identification of unsaturated seepage model of core rockfill dams using principal component analysis and multi-objective optimization. Structures 2022, 45, 145–162. [Google Scholar] [CrossRef]
- Li, J.; Chen, C.; Wu, Z.; Chen, J. Multi-source data-driven unsaturated seepage parameter inversion: Application to a high core rockfill dam. J. Hydrol. 2023, 617, 129171. [Google Scholar] [CrossRef]
- Abualigah, L.; Elaziz, M.A.; Sumari, P.; Geem, Z.W.; Gandomi, A.H. Reptile Search Algorithm (RSA): A nature-inspired meta-heuristic optimizer. Expert Syst. Appl. 2022, 191, 116158. [Google Scholar] [CrossRef]
- Sasmal, B.; Hussien, A.G.; Das, A.; Dhal, K.G.; Saha, R. Reptile Search Algorithm: Theory, Variants, Applications, and Performance Evaluation. Arch. Comput. Methods Eng. 2023, 31, 521–549. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Almotairi, K.H.; Abualigah, L. Improved reptile search algorithm with novel mean transition mechanism for constrained industrial engineering problems. Neural Comput. Appl. 2022, 34, 17257–17277. [Google Scholar] [CrossRef]
- Ding, J.; Huang, S.; Hao, Y.; Xiao, M. A modified reptile search algorithm for parametric estimation of fractional order model of lithium battery. Optim. Control. Appl. Methods 2023, 44, 3204–3218. [Google Scholar] [CrossRef]
- Chauhan, S.; Vashishtha, G.; Kumar, A.; Abualigah, L. Conglomeration of Reptile Search Algorithm and Differential Evolution Algorithm for Optimal Designing of FIR Filter. Circuits Syst. Signal Process. 2022, 42, 2986–3007. [Google Scholar] [CrossRef]
- Arora, S.; Kohli, M. Chaotic grey wolf optimization algorithm for constrained optimization problems. J. Comput. Des. Eng. 2018, 5, 458–472. [Google Scholar] [CrossRef]
- Yang, Z.; Wei, C. Prediction of equipment performance index based on improved chaotic lion swarm optimization–LSTM. Soft Comput. 2019, 24, 9441–9465. [Google Scholar] [CrossRef]
- Dhawale, D.; Kamboj, V.K.; Anand, P. An improved Chaotic Harris Hawks Optimizer for solving numerical and engineering optimization problems. Eng. Comput. 2021, 39, 1183–1228. [Google Scholar] [CrossRef]
- Fang, W.; Yong-shou, D.A.I.; Shao-shui, W. Modified chaos-genetic algorithm. Comput. Eng. Appl. 2010, 46, 29–32. [Google Scholar]
- Xin, Y.; Yong, L.; Guangming, L. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar] [CrossRef]
- Richards, L.A. Capillary conduction of liquids through porous mediums. Physics 1931, 1, 318–333. [Google Scholar] [CrossRef]
- Li, Y.L.; Liu, H.F.; Wen, L.F.; Xu, Z.G.; Zhang, Y. Reliability analysis of high core rockfill dam against seepage failure considering spatial variability of hydraulic parameters. Acta Geotech. 2024, 19, 4091–4106. [Google Scholar] [CrossRef]
- Amnyattalab, J.; Rezaie, H. Study of the effect of seepage through the body of earth dam on its stability by predicting the affecting hydraulic factors using models of Brooks-Corey and van Genuchten (Case study of Nazluchay and Shahrchay earth dams). Int. J. Environ. Sci. Technol. 2018, 15, 2625–2636. [Google Scholar] [CrossRef]
- Li, Y.F.; Sun, X.J.; Li, G.C.; Zhang, J.T.; Fang, D.H.; Wang, X.C. Impact of concrete face cracks on the saturated and unsaturated seepage behavior of rockfill dams. Structures 2024, 61, 13. [Google Scholar] [CrossRef]
- Preziosi, M.C.; Micic, T. Probabilistic assessment of clay earthfill dams subject to variable precipitation. In Proceedings of the 11th International Conference on Applications of Statistics and Probability in Civil Engineering (IC ASP), Zurich, Switzerland, 1–4 August 2011; pp. 2118–2126. [Google Scholar]
- Van Genuchten, M.T. A Closed-form Equation for Predicting the Hydraulic Conductivity of Unsaturated Soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Zhu, X.B.; Wang, X.L.; Li, X.; Liu, M.H.; Cheng, Z.F. A New Dam Reliability Analysis Considering Fluid Structure Interaction. Rock Mech. Rock Eng. 2018, 51, 2505–2516. [Google Scholar] [CrossRef]
- Fan, X.F.; Wu, Z.Y.; Liu, L.J.; Wen, Y.F.; Yu, S.; Zhao, Z.P.; Li, Z.F. Analysis of Sluice Foundation Seepage Using Monitoring Data and Numerical Simulation. Adv. Civ. Eng. 2019, 2019, 15. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).