
Discrete Random Renewable Replacements after the Expiration of Collaborative Preventive Maintenance Warranty

Abstract
:1. Introduction
2. Random Collaborative Warranty Contract
2.1. Random Collaborative Warranty
2.1.1. Definition of Collaborative Warranty
- Models the warranty cost resulting from Step 1 and then minimizes the warranty cost to obtain the optimal maintenance-effect measure .
- Prices the warranty contract based on the results of minimizing the warranty cost; that is, determines the selling price of the warranty based on the results of minimizing the warranty cost.
2.1.2. Modeling of the RCPMW-RTT
2.2. Optimization and Pricing of the RCPMW-RTT
2.3. Variant Warranties
3. Random Replacement Policies
3.1. Random Replacement Policy a
3.1.1. The Definition of Policy a
- If the current mission cycle ends before the time threshold , which is a non-extreme mission cycle, then the next mission cycle is renewed from the end of the current mission cycle;
- In the process of renewing the above term, if the mission cycle ends before the time threshold , then such a product will be replaced at the end of the mission cycle before the time threshold ;
- In the process of renewing the first term, if the extreme mission cycle arises before the mission cycle is renewed, then such a product will be replaced at the time threshold before the end of such a mission cycle.
3.1.2. The Modeling of the DRRBR
3.2. Random Replacement Policy b
3.2.1. The Definition of Policy b
- If the current mission cycle ends after the time threshold , then the next mission cycle is renewed from the end of the current mission cycle;
- In the process of renewing the above term, if the mission cycle ends after the time threshold , namely the first mission cycles are non-extreme mission cycles, then such a product will be replaced at the end of the mission cycle after the time threshold ;
- In the process of renewing the first term, if the first extreme mission cycle arises before the mission cycle is renewed, then such a product will be replaced at the end of such an extreme mission cycle.
3.2.2. The Modeling of the DRRFR
4. Numerically Analyzing the Proposed Approaches
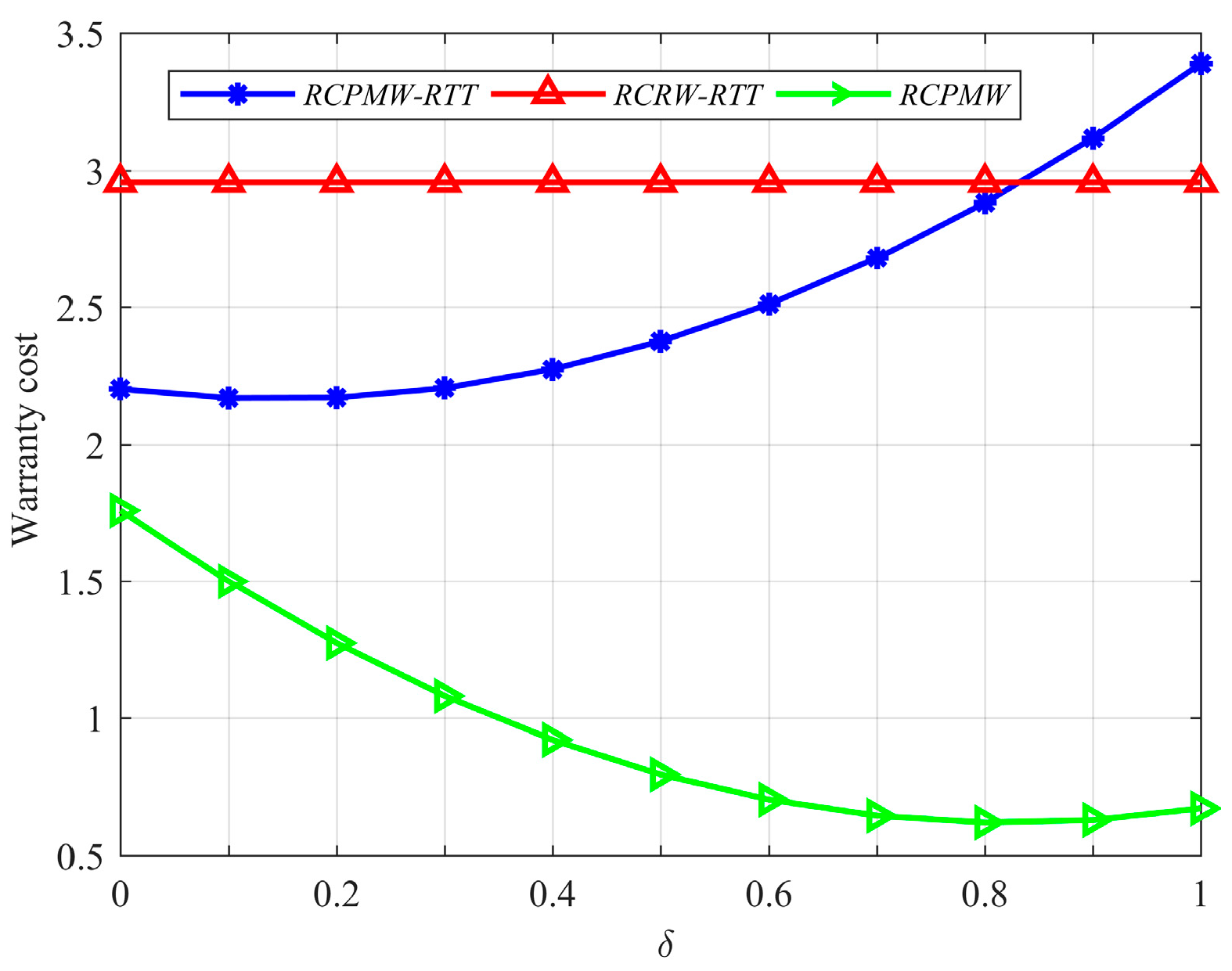
4.1. Numerically Analyzing the RCPMW-RTT
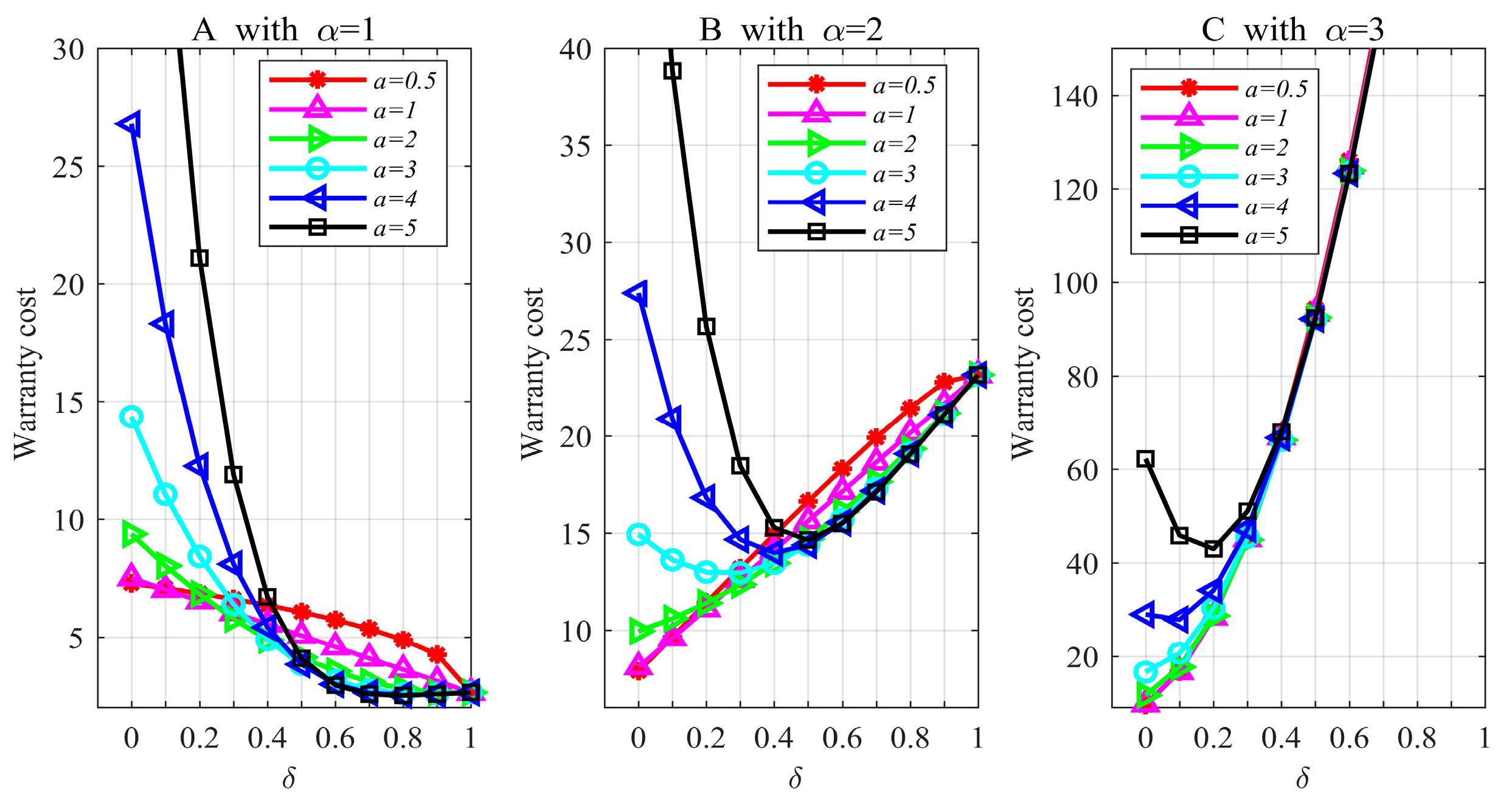
4.2. Numerically Analyzing the Proprosed Renewable Replacements
4.2.1. Numerically Analyzing the DRRBR
4.2.2. Numerically Analyzing the DRRFR
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Márquez, A.C. The Maintenance Management Framework: Models and Methods for Complex Systems Maintenance; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Nakagawa, T. Maintenance Theory of Reliability; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Prajapati, A.; Bechtel, J.; Ganesan, S. Condition based maintenance: A survey. J. Qual. Maint. Eng. 2012, 18, 384–400. [Google Scholar] [CrossRef]
- Teixeira, H.N.; Lopes, I.; Braga, A.C. Condition-based maintenance implementation: A literature review. Procedia Manuf. 2020, 51, 228–235. [Google Scholar] [CrossRef]
- Yang, L.; Chen, Y.; Ma, X.; Qiu, Q.; Peng, R. A prognosis-centered intelligent maintenance optimization framework under uncertain failure threshold. IEEE Trans. Reliab. 2023, 73, 115–130. [Google Scholar] [CrossRef]
- Yang, A.; Qiu, Q.; Zhu, M.; Cui, L.; Chen, W.; Chen, J. Condition-based maintenance strategy for redundant systems with arbitrary structures using improved reinforcement learning. Reliab. Eng. Syst. Saf. 2022, 225, 108643. [Google Scholar] [CrossRef]
- Nakagawa, T. Random Maintenance Policies; Springer: London, UK, 2014. [Google Scholar]
- Liu, B.; Wu, J.; Xie, M. Cost analysis for multi-component system with failure interaction under renewing free-replacement warranty. Eur. J. Oper. Res. 2015, 243, 874–882. [Google Scholar] [CrossRef]
- Balcer, Y.; Sahin, I. Replacement costs under warranty: Cost moments and time variability. Oper. Res. 1986, 34, 554–559. [Google Scholar] [CrossRef]
- Blischke, W.R.; Scheuer, E.M. Applications of renewal theory in analysis of the free-replacement warranty. Nav. Res. Logist. Q. 1981, 28, 193–205. [Google Scholar] [CrossRef]
- Ritchken, P.H. Warranty policies for non-repairable items under risk aversion. IEEE Trans. Reliab. 1985, 34, 147–150. [Google Scholar] [CrossRef]
- Yun, W.Y.; Lee, Y.W.; Ferreira, L. Optimal burn-in time under cumulative free replacement warranty. Reliab. Eng. Syst. Saf. 2002, 78, 93–100. [Google Scholar] [CrossRef]
- Wu, S.; Clements-Croome, D. Burn-in policies for products having dormant states. Reliab. Eng. Syst. Saf. 2007, 92, 278–285. [Google Scholar] [CrossRef]
- Yeh, R.H.; Ho, W.T.; Tseng, S.T. Optimal production run length for products sold with warranty. Eur. J. Oper. Res. 2000, 120, 575–582. [Google Scholar] [CrossRef]
- Chen, C.K.; Lo, C.C.; Weng, T.C. Optimal production run length and warranty period for an imperfect production system under selling price dependent on warranty period. Eur. J. Oper. Res. 2017, 259, 401–412. [Google Scholar] [CrossRef]
- Chien, Y.H. A new warranty strategy: Combining a renewing free-replacement warranty with a rebate policy. Qual. Reliab. Eng. Int. 2008, 24, 807–815. [Google Scholar] [CrossRef]
- Blischke, W.R.; Murthy, D.N.P. Product warranty management—I: A taxonomy for warranty policies. Eur. J. Oper. Res. 1992, 62, 127–148. [Google Scholar] [CrossRef]
- Blischke, W.R.; Murthy, D.N.P. Product warranty management—II: An integrated framework for study. Eur. J. Oper. Res. 1992, 62, 261–281. [Google Scholar]
- Shafiee, M.; Chukova, S. Maintenance models in warranty: A literature review. Eur. J. Oper. Res. 2013, 229, 561–572. [Google Scholar] [CrossRef]
- Mukhopadhyay, K.; Liu, B.; Bedford, T.; Finkelstein, M. Remaining lifetime of degrading systems continuously monitored by degrading sensors. Reliab. Eng. Syst. Saf. 2023, 231, 109022. [Google Scholar] [CrossRef]
- Muhammad, I.; Xiahou, T.; Liu, Y.; Muhammad, M. A random-effect Wiener process degradation model with transmuted normal distribution and ABC-Gibbs algorithm for parameter estimation. Reliab. Eng. Syst. Saf. 2024, 250, 110289. [Google Scholar] [CrossRef]
- Ye, Z.S.; Xie, M. Stochastic modelling and analysis of degradation for highly reliable products. Appl. Stoch. Models Bus. Ind. 2015, 31, 16–32. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L. Gamma process based optimal mission abort policy. Reliab. Eng. Syst. Saf. 2019, 190, 106496. [Google Scholar] [CrossRef]
- Wang, J.; Qiu, Q.; Wang, H.; Lin, C. Optimal condition-based preventive maintenance policy for balanced systems. Reliab. Eng. Syst. Saf. 2021, 211, 107606. [Google Scholar] [CrossRef]
- van Noortwijk, J.M.; vander Weide, J.A.; Kallen, M.J.; Pandey, M.D. Gamma processes and peaks-over-threshold distributions for time-dependent reliability. Reliab. Eng. Syst. Saf. 2007, 92, 1651–1658. [Google Scholar] [CrossRef]
- Yang, L.; Li, G.; Zhang, Z.; Ma, X.; Zhao, Y. Operations & maintenance optimization of wind turbines integrating wind and aging information. IEEE Trans. Sustain. Energy 2020, 12, 211–221. [Google Scholar]
- Yang, L.; Chen, Y.; Zhou, S.; Ma, X. RUL-centered postponed maintenance planning under random failure threshold. In Proceedings of the 2022 Global Reliability and Prognostics and Health Management (PHM-Yantai), Yantai, China, 13–16 October 2022; pp. 1–8. [Google Scholar]
- Qiu, Q.; Maillart, L.M.; Prokopyev, O.A.; Cui, L. Optimal condition-based mission abort decisions. IEEE Trans. Reliab. 2022, 72, 408–425. [Google Scholar] [CrossRef]
- Qiu, Q.; Li, R.; Zhao, X. Failure risk management: Adaptive performance control and mission abort decisions. Risk Anal. 2024, 1–20. [Google Scholar] [CrossRef]
- Yang, L.; Ma, Y.; Wei, F.; Qiu, Q. Optimal Condition-based Parameter Learning and Mission Abort Decisions. Nav. Res. Logist. 2024. [Google Scholar] [CrossRef]
- Shang, L.; Si, S.; Sun, S.; Jin, T. Optimal warranty design and post-warranty maintenance for products subject to stochastic degradation. IISE Trans. 2018, 50, 913–927. [Google Scholar] [CrossRef]
- Zhang, N.; Fouladirad, M.; Barros, A. Evaluation of the warranty cost of a product with type III stochastic dependence between components. Appl. Math. Model. 2018, 59, 39–53. [Google Scholar] [CrossRef]
- Liang, X.; Cui, L.; Wang, R. Non-renewable warranty cost analysis for dependent series configuration with distinct warranty periods. Reliab. Eng. Syst. Saf. 2024, 246, 110074. [Google Scholar] [CrossRef]
- Zheng, R.; Fang, H.; Hu, C. Joint optimization of inspection and condition-based maintenance for a deteriorating product under extended warranty. Reliab. Eng. Syst. Saf. 2024, 245, 110043. [Google Scholar] [CrossRef]
- Shang, L.; Qiu, Q.; Wu, C.; Du, Y. Random replacement policies to sustain the post-warranty reliability. J. Qual. Maint. Eng. 2023, 29, 481–508. [Google Scholar] [CrossRef]
- Shang, L.; Liu, B.; Qiu, Q.; Yang, L.; Du, Y. Designing warranty and maintenance policies for products subject to random working cycles. Reliab. Eng. Syst. Saf. 2023, 234, 109–187. [Google Scholar] [CrossRef]
- Shang, L.; Liu, B.; Qiu, Q.; Yang, L. Three-dimensional warranty and post-warranty maintenance of products with monitored mission cycles. Reliab. Eng. Syst. Saf. 2023, 239, 109–506. [Google Scholar] [CrossRef]
- Shang, L.; Chen, J.; Liu, B.; Lin, C.; Yang, L. Modeling Renewable Warranties and Post-Warranty Replacements for Self-Announcing Failure Products Subject to Mission Cycles. Symmetry 2024, 16, 603. [Google Scholar] [CrossRef]
- Shang, L.; Liu, B.; Yang, L.; Gao, K. Customizing Random Replacement Model and Flexible Warranty Model from the Perspective of Screening Reliability. Axioms 2023, 12, 358. [Google Scholar] [CrossRef]
- Sahin, I.; Polatoglu, H. Maintenance strategies following the expiration of warranty. IEEE Trans. Reliab. 1996, 45, 220–228. [Google Scholar] [CrossRef]
- Jung, K.M.; Han, S.S.; Park, D.H. Optimization of cost and downtime for replacement model following the expiration of warranty. Reliab. Eng. Syst. Saf. 2008, 93, 995–1003. [Google Scholar] [CrossRef]
- Shang, L.; Si, S.; Cai, Z. Optimal maintenance–replacement policy of products with competing failures after expiry of the warranty. Comput. Ind. Eng. 2016, 98, 68–77. [Google Scholar] [CrossRef]
- Jung, K.M.; Park, M.; Park, D.H. Optimal maintenance strategy for non-renewing replacement–repair warranty. Appl. Stoch. Models Bus. Ind. 2012, 28, 607–614. [Google Scholar] [CrossRef]
- Liu, P.; Wang, G. Generalized non-renewing replacement warranty policy and an age-based post-warranty maintenance strategy. Eur. J. Oper. Res. 2023, 311, 567–580. [Google Scholar] [CrossRef]
- Qiao, P.; Luo, M.; Ma, Y.; Jabbar, A. Optimal warranty option and post-warranty maintenance strategy under a warranty menu: From a consumer perspective. Int. J. Prod. Res. 2024, 62, 1586–1608. [Google Scholar] [CrossRef]
- Shang, L.; Liu, B.; Cai, Z.; Wu, C. Random maintenance policies for sustaining the reliability of the product through 2D-warranty. Appl. Math. Model. 2022, 111, 363–383. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L.; Gao, H. Availability and maintenance modelling for systems subject to multiple failure modes. Comput. Ind. Eng. 2017, 108, 192–198. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L.; Shen, J.; Yang, L. Optimal maintenance policy considering maintenance errors for systems operating under performance-based contracts. Comput. Ind. Eng. 2017, 112, 147–155. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L.; Shen, J. Availability and maintenance modeling for systems subject to dependent hard and soft failures. Appl. Stoch. Models Bus. Ind. 2018, 34, 513–527. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L.; Kong, D. Availability and maintenance modeling for a two-component system with dependent failures over a finite time horizon. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2018, 233, 200–210. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L. Availability analysis for general repairable systems with repair time threshold. Commun. Stat.-Theory Methods 2019, 48, 628–647. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L.; Shen, J. Availability analysis and maintenance modelling for inspected Markov systems with down time threshold. Qual. Technol. Quant. Manag. 2019, 16, 478–495. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L.; Kong, D. Availability analysis and optimal inspection policy for systems with neglected down time. Commun. Stat.-Theory Methods 2019, 48, 2787–2809. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L. Availability analysis for periodically inspected systems subject to multiple failure modes. Int. J. Syst. Sci.-Oper. Logist. 2019, 6, 258–271. [Google Scholar] [CrossRef]
- Qiu, Q.; Cui, L. Optimal mission abort policy for systems subject to random shocks based on virtual age process. Reliab. Eng. Syst. Saf. 2019, 189, 11–20. [Google Scholar] [CrossRef]
- Qiu, Q.; Liu, B.; Lin, C.; Wang, J. Availability analysis and maintenance optimization for multiple failure mode systems considering imperfect repair. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2021, 235, 982–997. [Google Scholar] [CrossRef]
- Qiu, Q.; Kou, M.; Chen, K.; Deng, Q.; Kang, F.; Lin, C. Optimal stopping problems for mission oriented systems considering time redundancy. Reliab. Eng. Syst. Saf. 2020, 205, 107226. [Google Scholar] [CrossRef]
- Barlow, R.E.; Proschan, F. Mathematical Theory of Reliability; John Wiley & Sons: Hoboken, NJ, USA, 1965. [Google Scholar]
- Peng, R.; He, X.; Zhong, C.; Kou, G.; Xiao, H. Preventive maintenance for heterogeneous parallel systems with two failure modes. Reliab. Eng. Syst. Saf. 2022, 220, 108310. [Google Scholar] [CrossRef]
- Peng, R.; Liu, B.; Zhai, Q.; Wang, W. Optimal maintenance strategy for systems with two failure modes. Reliab. Eng. Syst. Saf. 2019, 188, 624–632. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3 | 15 | 2.4527 | 14 | 2.3283 | 13 | 2.2245 |
| 4 | 12 | 2.5732 | 11 | 2.4128 | 11 | 2.2848 |
| 5 | 10 | 2.7154 | 9 | 2.5130 | 7 | 2.3980 |
| 0.5 | 13 | 2.3996 | 13 | 2.5055 | 12 | 2.6086 |
| 0.7 | 13 | 2.4051 | 13 | 2.5126 | 12 | 2.6175 |
| 0.9 | 13 | 2.4106 | 13 | 2.5197 | 12 | 2.6264 |
| 3 | 2 | 1.9745 | 2 | 1.8047 | 2 | 1.7490 |
| 4 | 2 | 1.9574 | 2 | 1.7969 | 2 | 1.7007 |
| 5 | 1 | 1.9281 | 1 | 1.7586 | 1 | 1.6549 |
| 0.3 | 3 | 1.7321 | 3 | 1.8254 | 2 | 1.9565 |
| 0.5 | 3 | 1.7403 | 3 | 1.8374 | 2 | 1.9745 |
| 0.7 | 3 | 1.7495 | 3 | 1.8507 | 2 | 1.9945 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Chen, J.; Lai, Y.; Yu, X.; Shang, L.; Peng, R.; Liu, B. Discrete Random Renewable Replacements after the Expiration of Collaborative Preventive Maintenance Warranty. Mathematics 2024, 12, 2845. https://doi.org/10.3390/math12182845
Chen H, Chen J, Lai Y, Yu X, Shang L, Peng R, Liu B. Discrete Random Renewable Replacements after the Expiration of Collaborative Preventive Maintenance Warranty. Mathematics. 2024; 12(18):2845. https://doi.org/10.3390/math12182845
Chicago/Turabian StyleChen, Hui, Jie Chen, Yangyang Lai, Xiaoqi Yu, Lijun Shang, Rui Peng, and Baoliang Liu. 2024. "Discrete Random Renewable Replacements after the Expiration of Collaborative Preventive Maintenance Warranty" Mathematics 12, no. 18: 2845. https://doi.org/10.3390/math12182845