
Design and Implementation of Digital PID Control for Mass-Damper Rectilinear Systems



Abstract
:1. Introduction
- A mathematical model of an educational control product (ECP) MD rectilinear system was derived and analyzed. The stability and transient response characteristics of the open-loop electromechanical system were studied based on experimental setup integrated with a dSPACE system.
- A detailed design procedure of a digital PID controller was introduced to eliminate the steady-state error, improve the relative stability, and enhance the transient response of the electromechanical system. MATLAB simulations were provided to validate the design methodology.
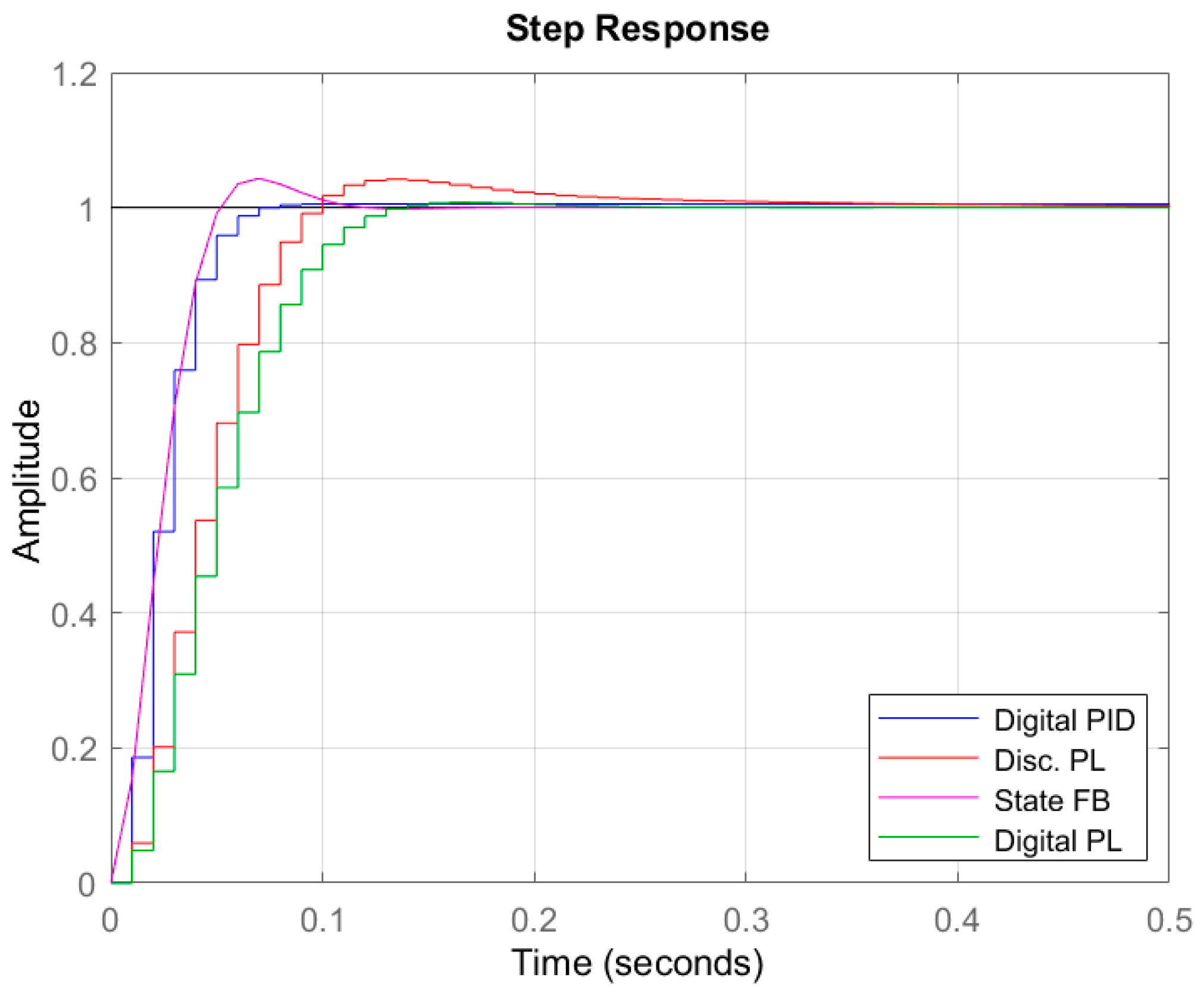
- The digital PID controller of the electromechanical system was compared to other common control approaches such as the pole-placement technique and digital phase-lead controller to investigate their tracking performance and transient response characteristics.
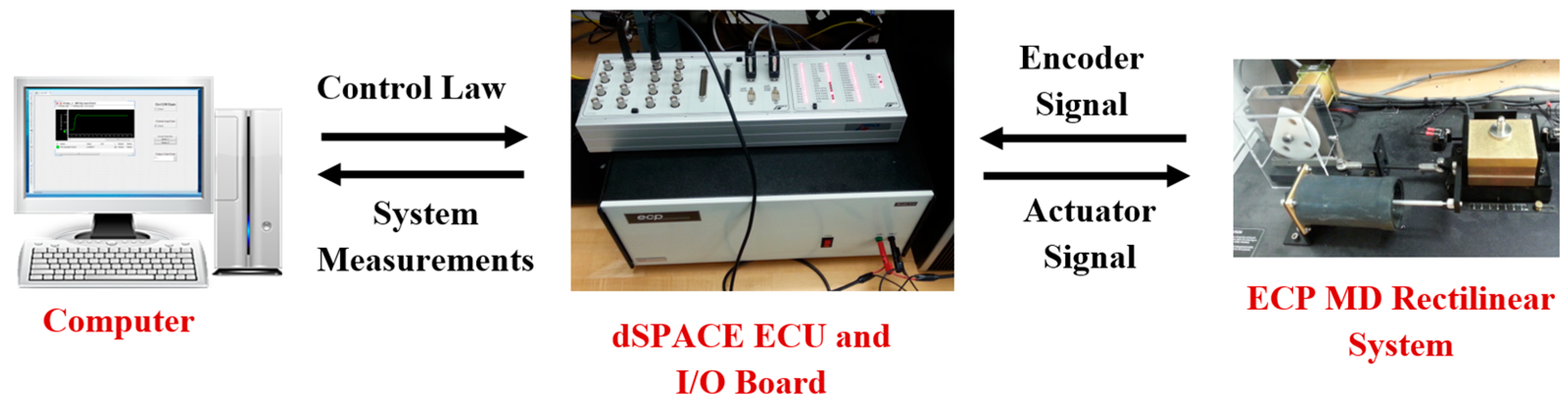
- The practical implementation of the digital PID-controlled ECP MD rectilinear system using the dSPACE platform is presented to investigate the performance of the proposed digital controller and the dynamical system response in real-time.
2. Modeling and Analysis of the Electromechanical System
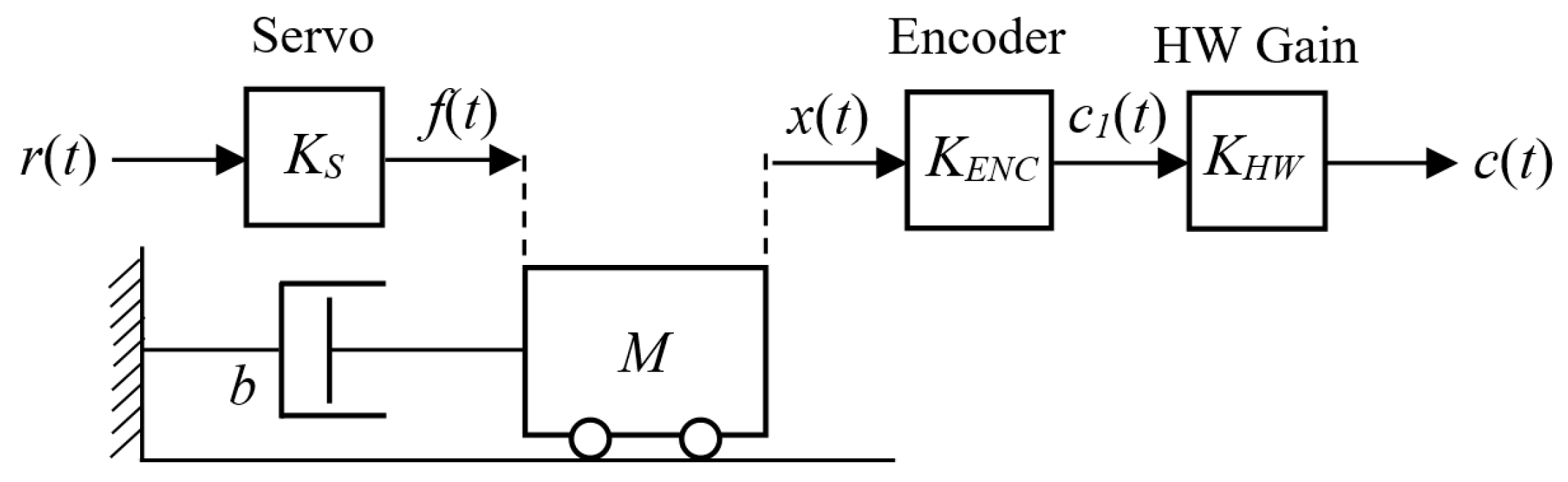
2.1. Mathematical Model of ECP MD Rectilinear System
2.2. Analysis of Open-Loop Rectilinear System
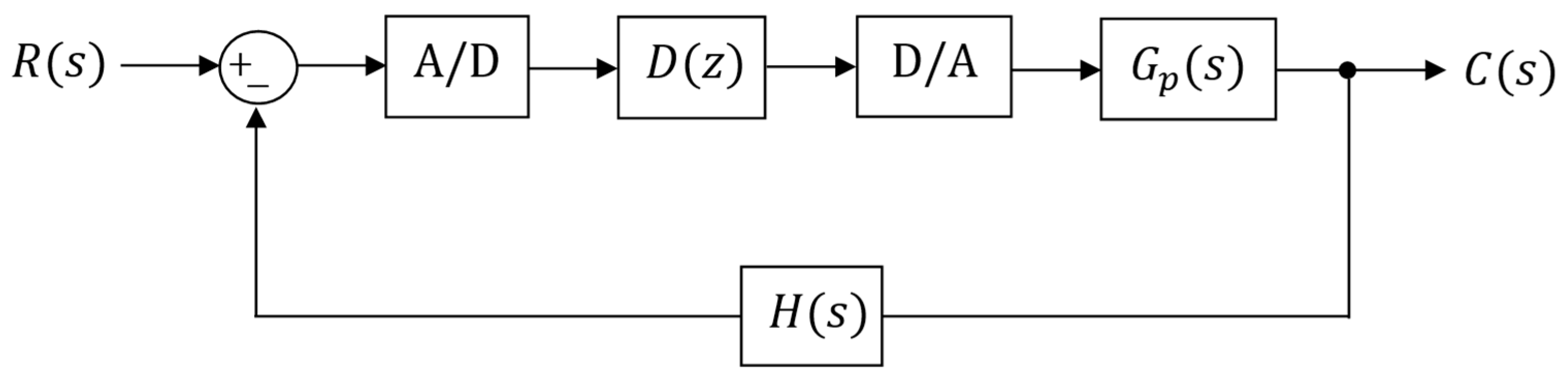
3. Digital PID Control Design
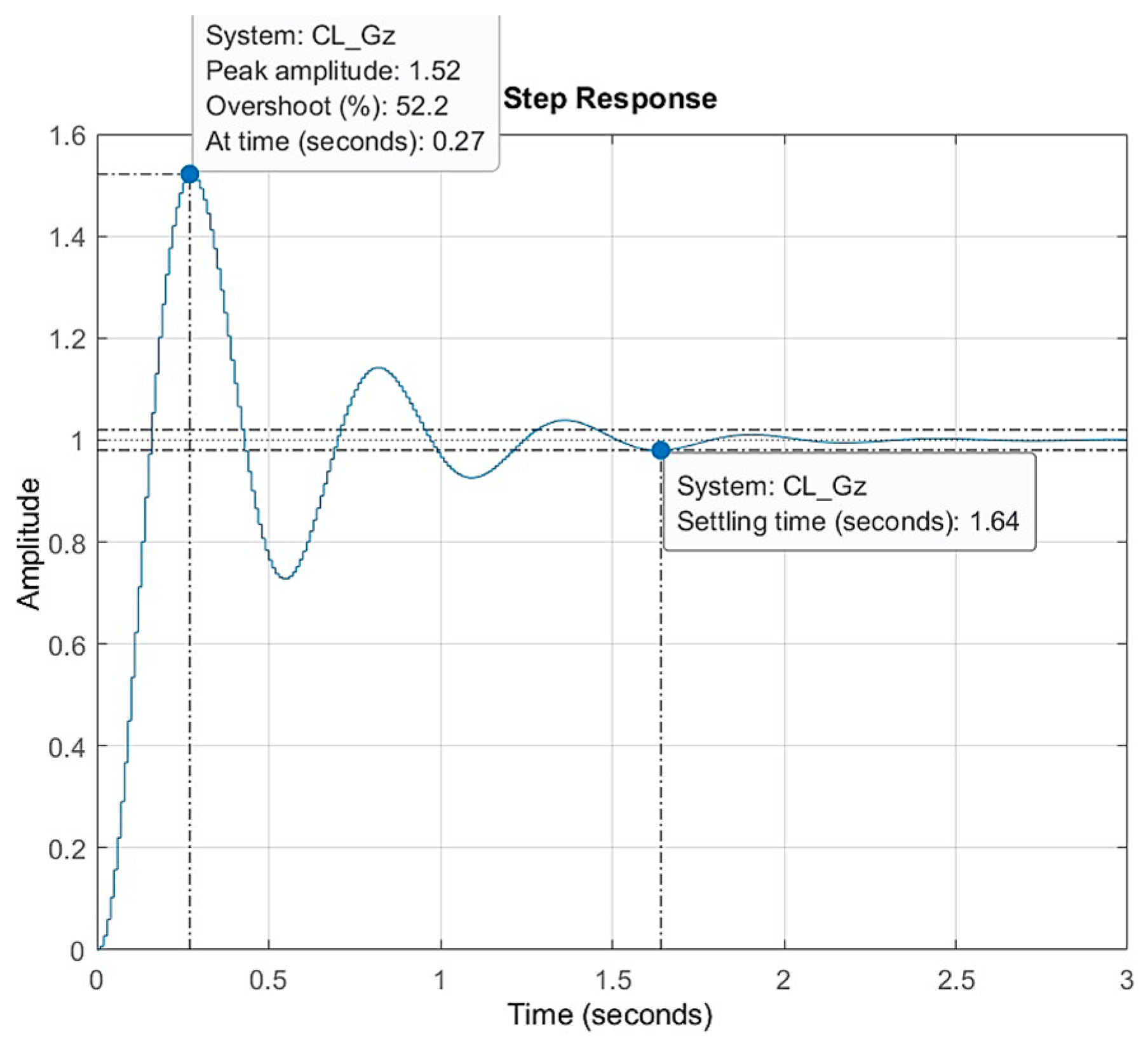
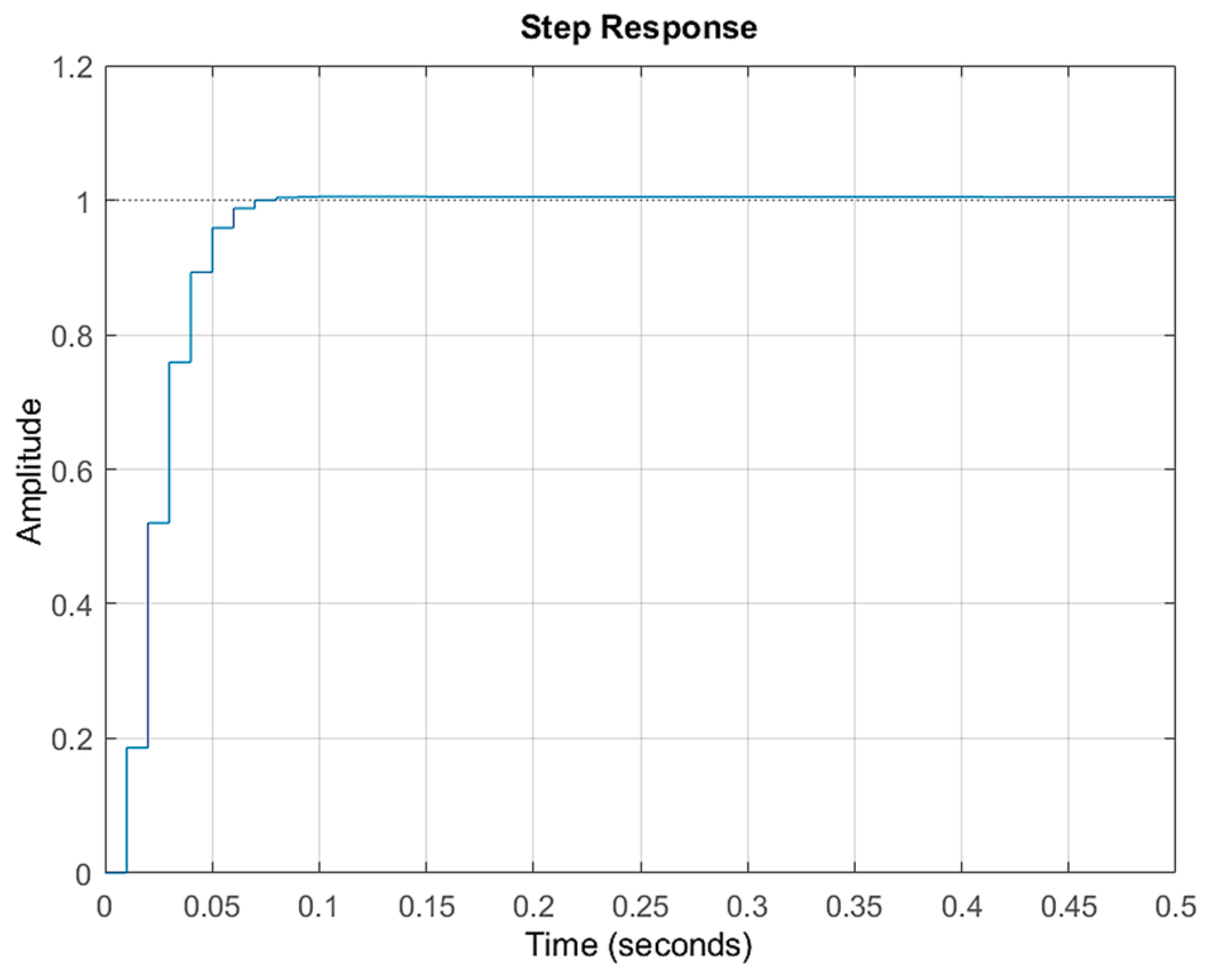
- Percentage overshoot PO ≤ 5%
- Settling time ≤ 1 s
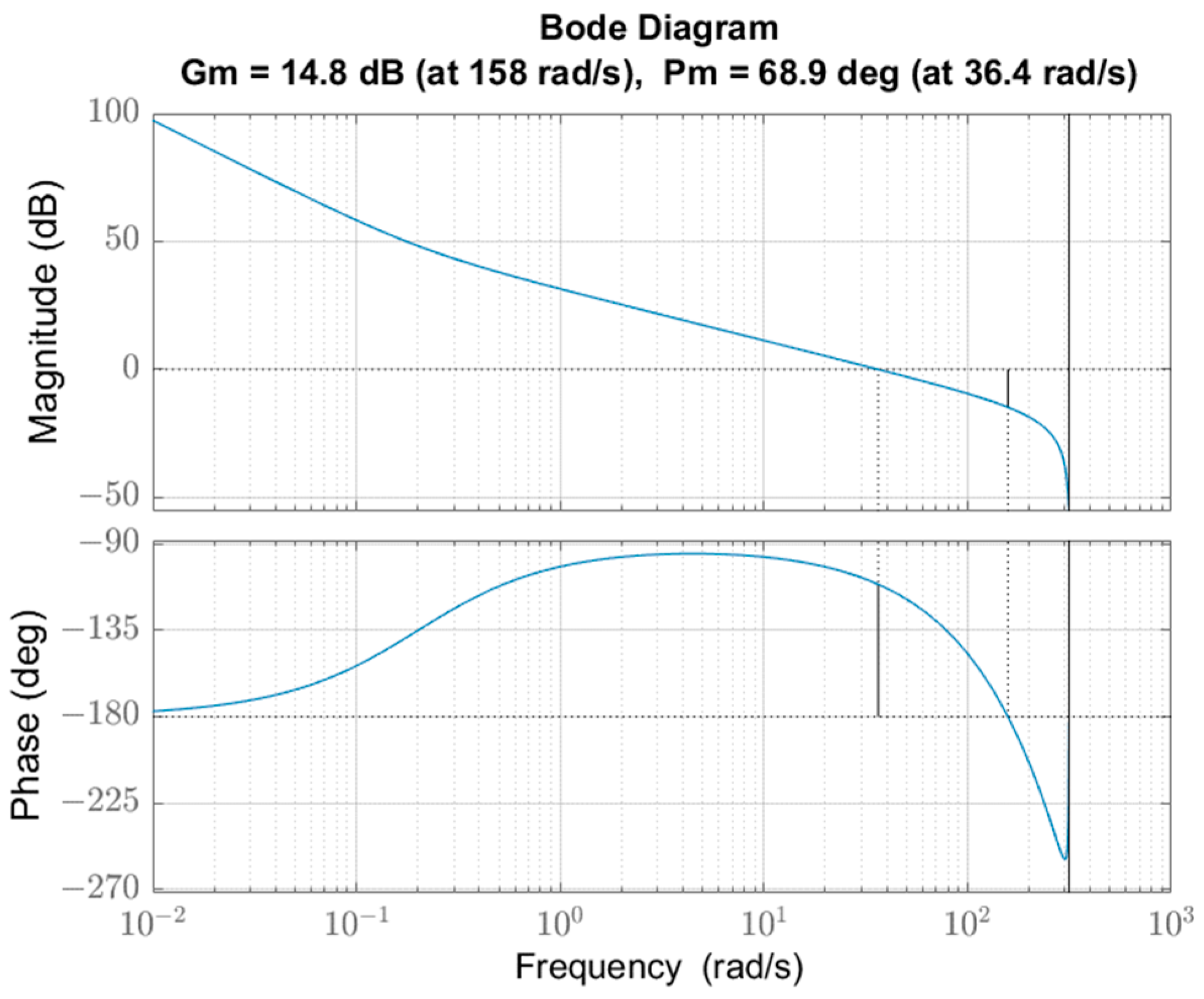
- Phase margin PM ≥ 65.
- Zero steady-state error.
- Set one of the digital PID controller zeros to cancel out the significant pole of the discretized plant, while the other zero is placed close to the unity circle;
- Equate the two digital controller zeros obtained in step 1 with the corresponding controller zeros given in (9);
- Choose the damping ratio and damped frequency that satisfy the desired transient response;
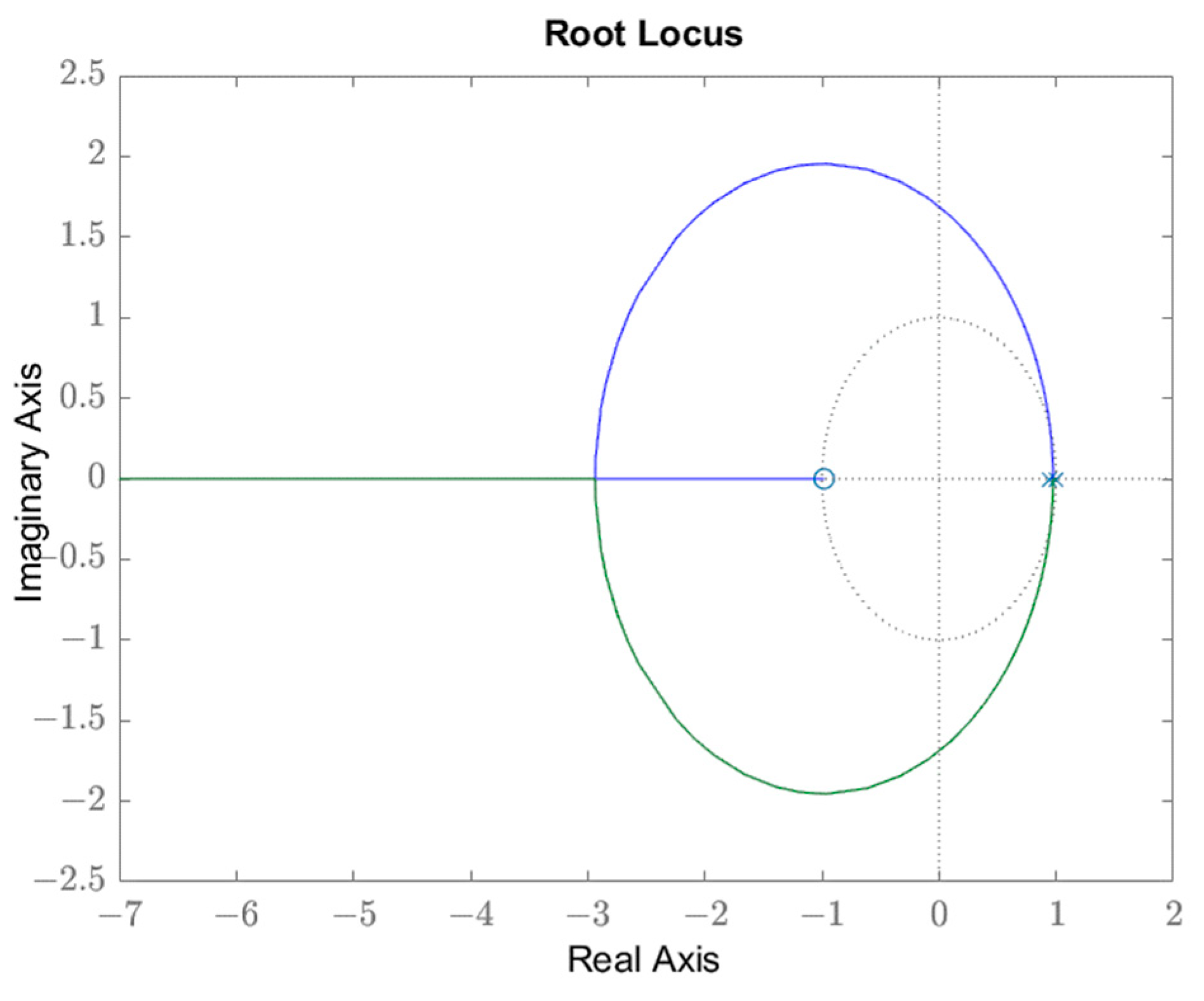
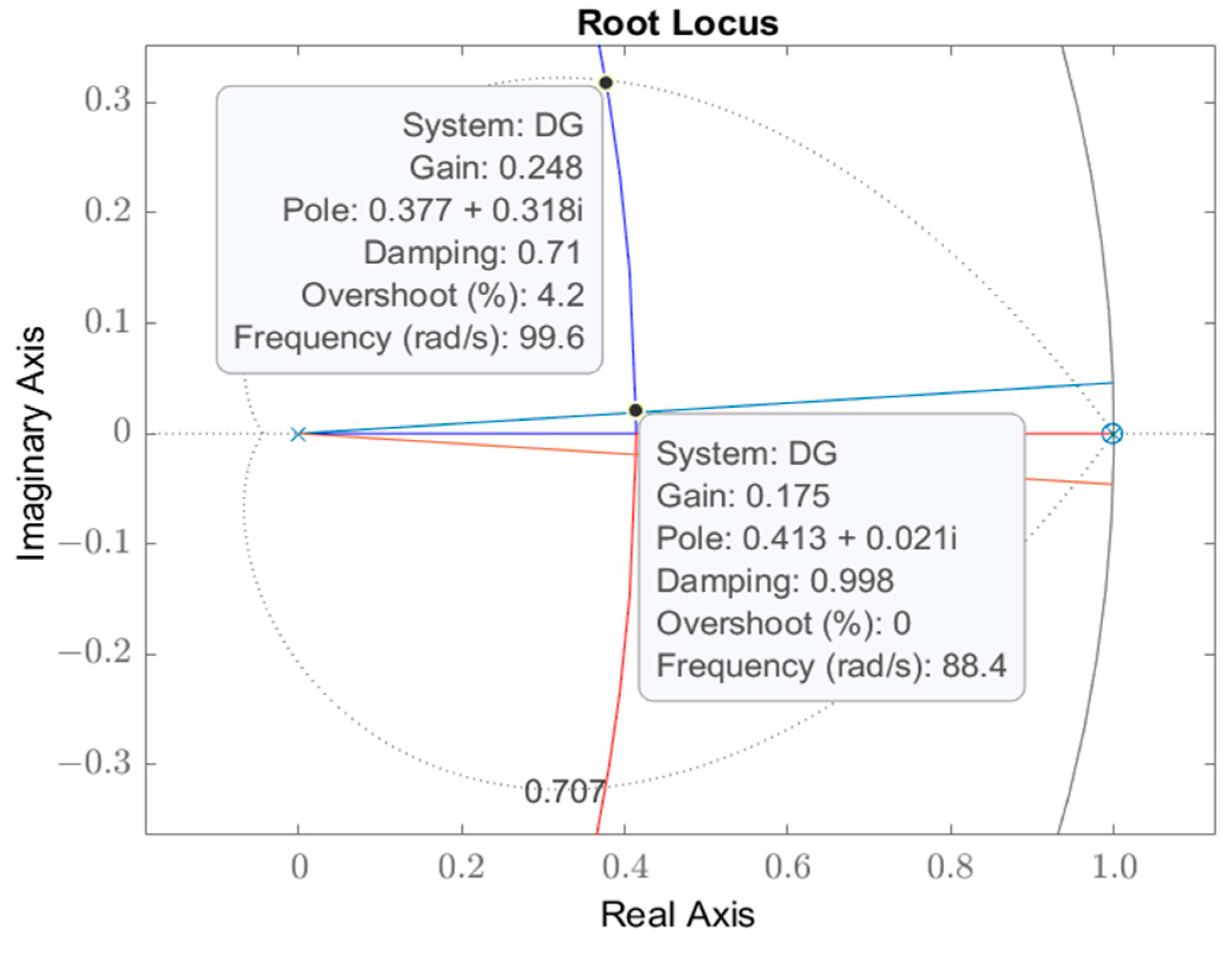
- Plot the root locus of the loop transfer function of the digital compensated system along with and lines;
- Determine the range of the controller gain that achieves the desired transient response on the root locus;
- Set the linear system equations to solve for the controller gains , , and ;
- Check the time and frequency responses of the digital compensated system to see if the desired specifications are met.
4. Simulation Results and Discussion
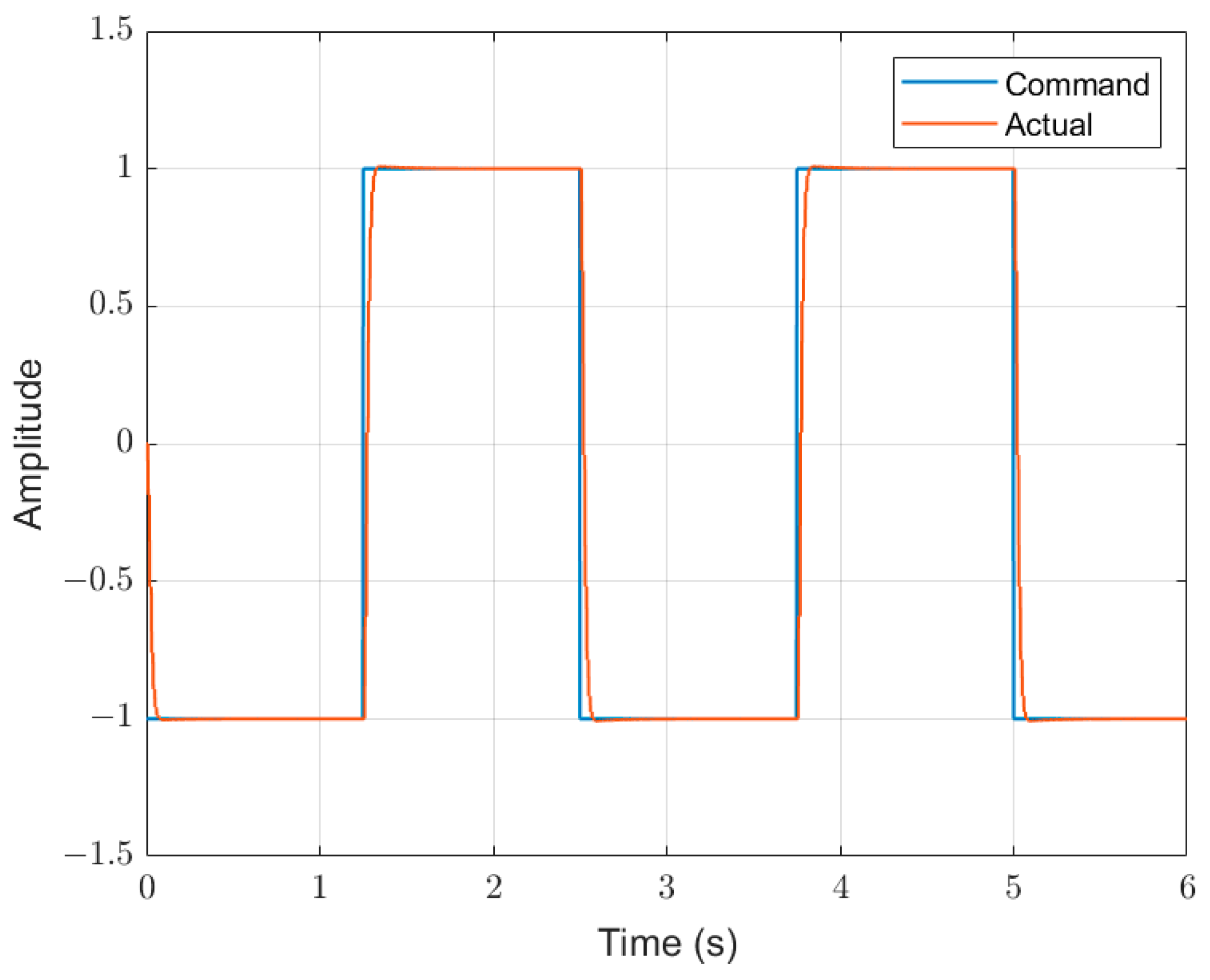
4.1. Tracking Performance
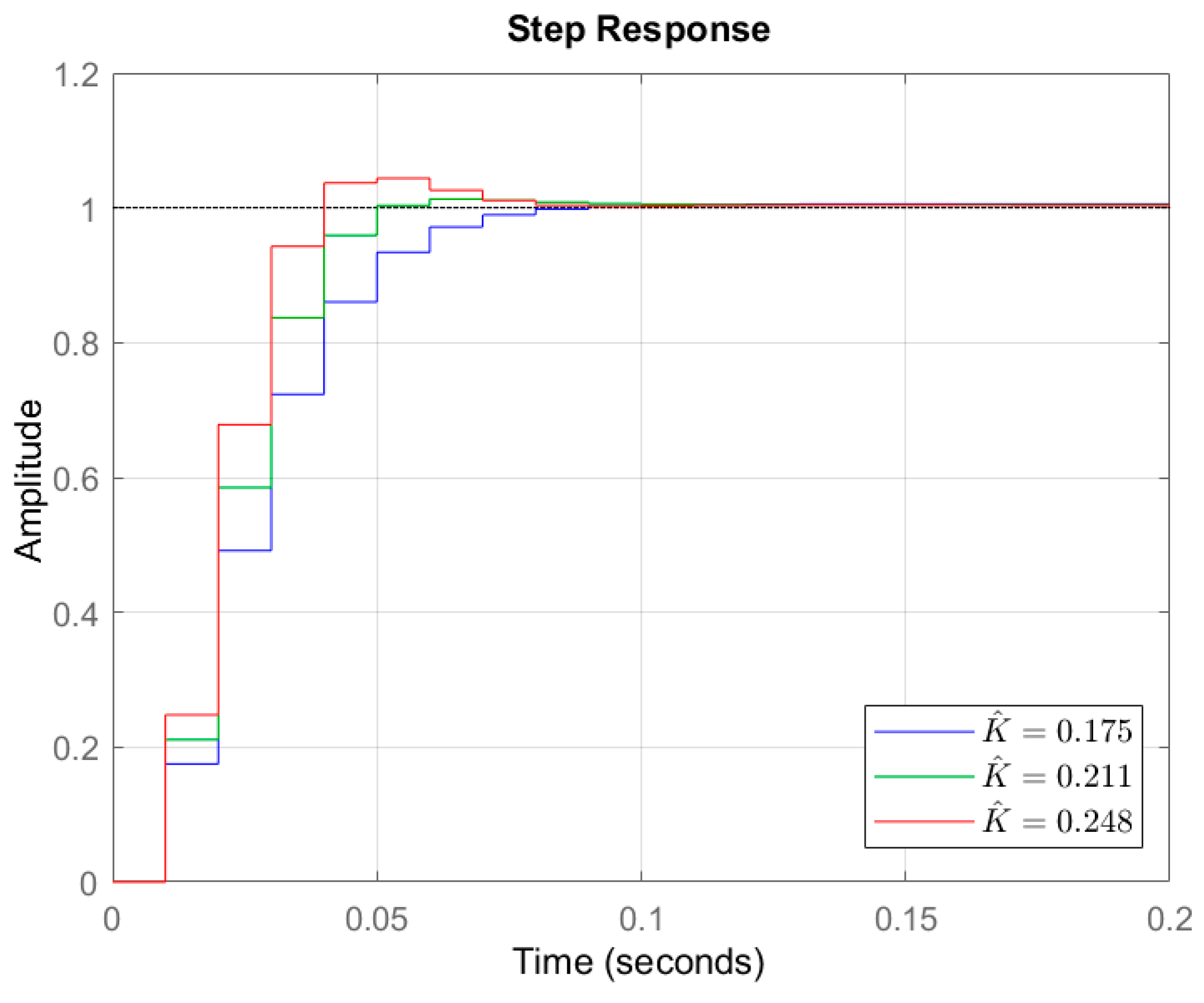
4.2. Effect of Gain Selection on Control Performance
Remarks
- The digital PID controller gains are given in (14), which are represented by , , and . The gain , on the other hand, is defined by the product of the plant dc gain and the term . Since the sampling time and the plant dc gain are known, one can easily select the parameter on the root locus rather than adjusting the PID controller gains to achieve the desired transient response. This feature can simplify the digital control parameter selection.
- A suitable value can be selected within the range , was determined based on the desired dynamical response. As illustrated in Figure 6, the damping ratio and damped frequency lines on the root locus define the range of . For the proposed digital PID-controlled electromechanical system, was set to 0.186 to obtain the minimum percentage overshoot and the shortest settling time.
4.3. Comparison with Other Control Schemes
5. Experimental Validation
5.1. Structure of the dSPACE Platform
5.2. Digital Control Algorithm
- Start time: 0.0;
- Stop time: inf;
- Type: Fixed Step;
- Solver: ode1 (Euler);
- Periodic sample time constraint: Unconstrained;
- Fixed-step size: 0.01 (Same as the Zero-Order Hold Sample Time).
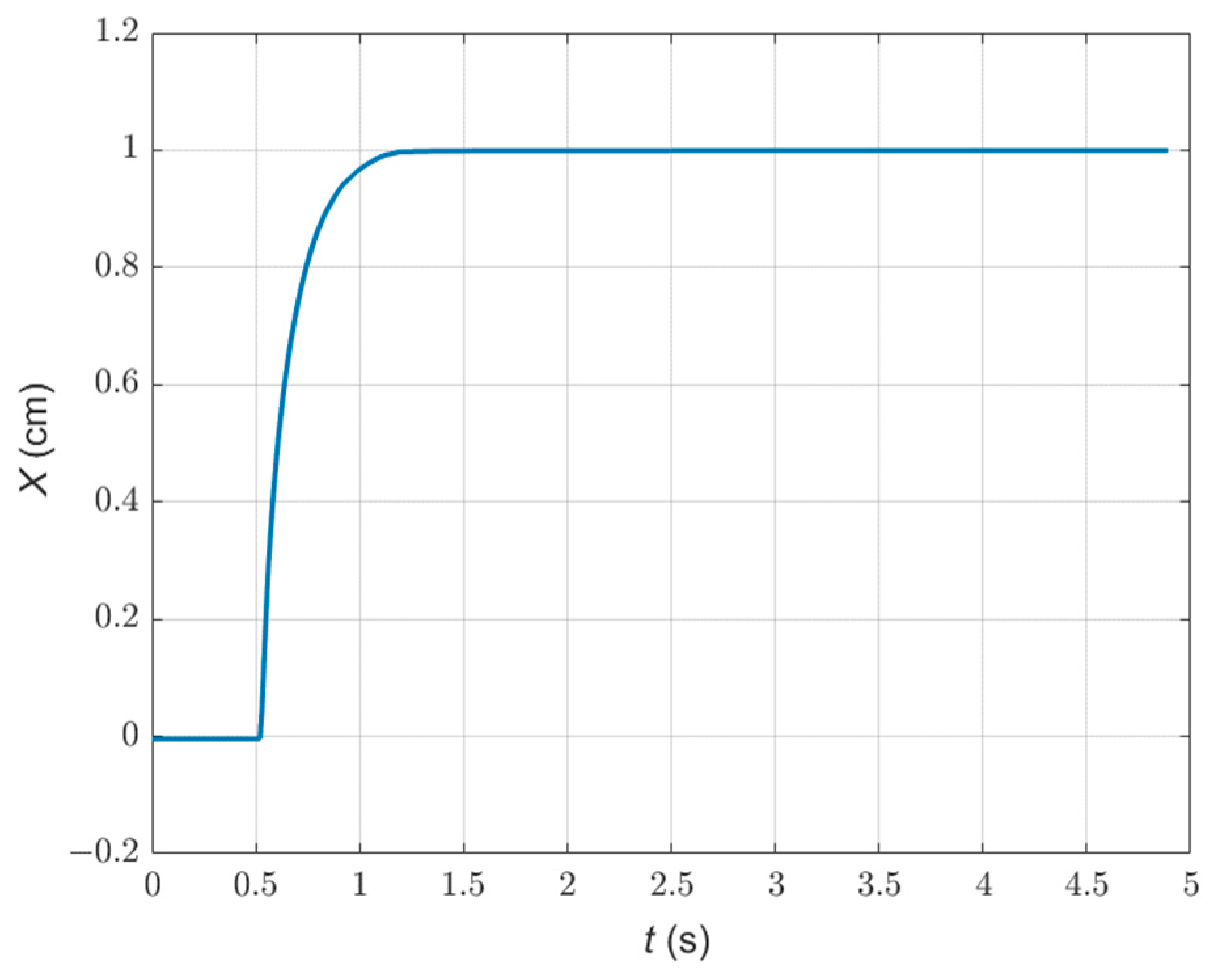
5.3. Experimental Results
- The SIMULINK model parameters were uploaded to the virtual instruments on the ControlDesk layout;
- The mass carriage was set at 0 cm and 10 V of input voltage was applied to the ADC_5 channel on the dSPACE I/O board;
- The dSPACE ECU was connected to the DAC_1 channel on the dSPACE I/O board, and the ECU switch was turned ON;
- The Start Measuring button on the ControlDesk layout was selected to activate the Plotter;
- The On/Off Check button on ControlDesk layout was pressed to apply a unit step command input (i.e., 1 cm) to the ECP rectilinear system.
- The Stop Measuring button was selected once a complete step response was displayed on the Plotter.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, M.; Jing, X. A Bioinspired Dynamics-Based Adaptive Fuzzy SMC Method for Half-Car Active Suspension Systems with Input Dead Zones and Saturations. IEEE Trans. Cybern. 2021, 51, 1743–1755. [Google Scholar] [CrossRef] [PubMed]
- Kopylov, S.; Chen, Z.; Abdelkareem, M.A.A. Implementation of an Electromagnetic Regenerative Tuned Mass Damper in a Vehicle Suspension System. IEEE Access 2020, 8, 110153–110163. [Google Scholar] [CrossRef]
- Feng, J.; Liu, Z.; He, X.; Fu, Q.; Li, G. Adaptive Vibration Control for an Active Mass Damper of a High-Rise Building. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1970–1983. [Google Scholar] [CrossRef]
- Zhao, X.; Weiss, G. Stability Properties of Coupled Impedance Passive LTI Systems. IEEE Trans. Automat. Control. 2017, 62, 5769–5779. [Google Scholar] [CrossRef]
- Liu, J.-R.; Tsai, C.-P.; Du, W.-R.; Chen, T.-Y.; Chen, J.-S.; Li, W.-C. Vibration Mode Suppression in Micromechanical Resonators Using Embedded Anti-Resonating Structures. J. Microelectromech. Syst. 2021, 30, 53–63. [Google Scholar] [CrossRef]
- Wang, Q.; Li, H.-N.; Zhang, P. Vibration Control of a High-Rise Slender Structure with a Spring Pendulum Pounding Tuned Mass Damper. Actuators 2021, 10, 44. [Google Scholar] [CrossRef]
- Ocak, A.; Bekdaş, G.; Nigdeli, S.M.; Kim, S.; Geem, Z.W. Optimization of Tuned Liquid Damper Including Different Liquids for Lateral Displacement Control of Single and Multi-Story Structures. Buildings 2022, 12, 377. [Google Scholar] [CrossRef]
- Zhang, B.-L.; Han, Q.-L.; Zhang, X.-M.; Yu, X. Sliding Mode Control with Mixed Current and Delayed States for Offshore Steel Jacket Platforms. IEEE Trans. Control Syst. Technol. 2014, 22, 1769–1783. [Google Scholar] [CrossRef]
- Fu, L.; Song, A. Model-Based Load Characteristics Analysis of the Multi-Dimensional Force Sensor. IEEE Access 2020, 8, 116431–116440. [Google Scholar] [CrossRef]
- Alsharif, K.I.; Pesch, A.H.; Borra, V.; Li, F.X.; Cortes, P.; Macdonald, E.; Choo, K. A Novel Modal Representation of Battery Dynamics. IEEE Access 2022, 10, 16793–16806. [Google Scholar] [CrossRef]
- Venceslau de Souto, J.I.; Barbosa da Rocha, Á.; Duarte, R.N.C.; de Moura Fernandes, E. Design and Implementation of an Embedded Data Acquisition System for Vehicle Vertical Dynamics Analysis. Sensors 2023, 23, 9491. [Google Scholar] [CrossRef] [PubMed]
- Kandil, A.; Hamed, Y.S.; Abualnaja, K.M.; Awrejcewicz, J.; Bednarek, M. 1/3 Order Subharmonic Resonance Control of a Mass-Damper-Spring Model via Cubic-Position Negative-Velocity Feedback. Symmetry 2022, 14, 685. [Google Scholar] [CrossRef]
- Kandil, A.; Hamed, Y.S.; Mohamed, M.S.; Awrejcewicz, J.; Bednarek, M. Third-Order Superharmonic Resonance Analysis and Control in a Nonlinear Dynamical System. Mathematics 2022, 10, 1282. [Google Scholar] [CrossRef]
- Kandil, A.; Hamed, Y.S.; Awrejcewicz, J. Harmonic Balance Method to Analyze the Steady-State Response of a Controlled Mass-Damper-Spring Model. Symmetry 2022, 14, 1247. [Google Scholar] [CrossRef]
- Zhang, S.; Li, Q.; Zhao, X.; Liu, Z.; Li, G. Vibration Control for an Active Mass Damper of a High-Rise Building with Input and Output Constraints. IEEE ASME Trans. Mechatron. 2023, 28, 186–196. [Google Scholar] [CrossRef]
- Chang, S. Active Mass Damper for Reducing Wind and Earthquake Vibrations of a Long-Period Bridge. Actuators 2020, 9, 66. [Google Scholar] [CrossRef]
- Bounemeur, A.; Chemachema, M.; Zahaf, A.; Bououden, S. Adaptive Fuzzy Fault-Tolerant Control Using Nussbaum Gain for a Class of SISO Nonlinear Systems with Unknown Directions; Springer: Singapore, 2021; pp. 493–510. [Google Scholar]
- Bounemeur, A.; Chemachema, M. Adaptive Fuzzy Fault-Tolerant Control Using Nussbaum-Type Function with State-Dependent Actuator Failures. Neural Comput. Appl. 2021, 33, 191–208. [Google Scholar] [CrossRef]
- Bounemeur, A.; Chemachema, M. Optimal adaptive fuzzy fault-tolerant control applied on a quadrotor attitude stabilization based on particle swarm optimization. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2024, 238, 704–719. [Google Scholar] [CrossRef]
- Wang, F.; Long, L. Switched-Observer-Based Event-Triggered Adaptive Fuzzy Funnel Control for Switched Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 1773–1787. [Google Scholar] [CrossRef]
- Li, Y.-X.; Yang, G.-H. Graph-Theory-Based Decentralized Adaptive Output-Feedback Control for a Class of Nonlinear Interconnected Systems. IEEE Trans. Cybern. 2019, 49, 2444–2453. [Google Scholar] [CrossRef]
- Long, L.; Zhao, J. Adaptive Output-Feedback Neural Control of Switched Uncertain Nonlinear Systems with Average Dwell Time. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1350–1362. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Ahn, C.K.; Xiang, Z. Sampled-Data Adaptive Output Feedback Fuzzy Stabilization for Switched Nonlinear Systems with Asynchronous Switching. IEEE Trans. Fuzzy Syst. 2019, 27, 200–205. [Google Scholar] [CrossRef]
- Zhao, L.; Cao, X.; Li, X. Adaptive Sliding-Mode Control for Inertial Reference Units via Adaptive Tracking Differentiators. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3208–3218. [Google Scholar] [CrossRef]
- Wang, T.; Zhou, J.; Wu, Z.; Liu, R.; Zhang, J.; Liang, Y. A Time-Varying PD Sliding Mode Control Method for the Container Crane Based on a Radial-Spring Damper. Electronics 2022, 11, 3543. [Google Scholar] [CrossRef]
- Al-Baidhani, H.; Salvatierra, T.; Ordonez, R.; Kazimierczuk, M.K. Simplified Nonlinear Voltage-Mode Control of PWM DC-DC Buck Converter. IEEE Trans. Energy Convers. 2021, 36, 431–440. [Google Scholar] [CrossRef]
- Al-Baidhani, H.; Kazimierczuk, M.K. Simplified Nonlinear Current-Mode Control of DC-DC Cuk Converter for Low-Cost Industrial Applications. Sensors 2023, 23, 1462. [Google Scholar] [CrossRef]
- Al-Baidhani, H.; Kazimierczuk, M.K. Simplified Double-Integral Sliding-Mode Control of PWM DC-AC Converter with Constant Switching Frequency. Appl. Sci. 2022, 12, 10312. [Google Scholar] [CrossRef]
- Clark, J.V.; Misiats, O.; Sayed, S. Electrical Control of Effective Mass, Damping, and Stiffness of MEMS Devices. IEEE Sens. J. 2017, 17, 1363–1372. [Google Scholar] [CrossRef]
- Zhang, Z.; Su, S.-F.; Niu, Y. Dynamic Event-Triggered Control for Interval Type-2 Fuzzy Systems Under Fading Channel. IEEE Trans. Cybern. 2021, 51, 5342–5351. [Google Scholar] [CrossRef]
- Sui, S.; Chen, C.L.P.; Tong, S. Neural Network Filtering Control Design for Nontriangular Structure Switched Nonlinear Systems in Finite Time. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2153–2162. [Google Scholar] [CrossRef]
- Tang, X.; Wu, M.; Li, M.; Ding, B. On Designing the Event-Triggered Multistep Model Predictive Control for Nonlinear System Over Networks with Packet Dropouts and Cyber Attacks. IEEE Trans. Cybern. 2022, 52, 11200–11212. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.; Cho, K.D. Kinematic Algorithms and Robust Controller Design for Inertially Stabilized System. IEEE ASME Trans. Mechatron. 2014, 19, 76–87. [Google Scholar] [CrossRef]
- Kandil, A.; Hamed, Y.S.; Alsharif, A.M.; Awrejcewicz, J. 2D and 3D Visualizations of the Mass-Damper-Spring Model Dynamics Controlled by a Servo-Controlled Linear Actuator. IEEE Access 2021, 9, 153012–153026. [Google Scholar] [CrossRef]
- Bounemeur, A.; Zahaf, A.; Chemachema, M. PID Controller for Precise Voltage Output of Solid Oxide Fuel Cell. In Proceedings of the International Conference of Nanotechnology for Environmental Protection and Clean Energy Production (ICNEP), Constantine, Algeria, 9–10 October 2023; pp. 319–326. [Google Scholar]
- Tang, J.; Li, H.; Zhang, J.; Guan, K.; Shan, Q.; Liang, X. A robust PID and RLS controller for TCP/AQM system. J. Netw. Comput. Appl. 2024, 229, 103947. [Google Scholar] [CrossRef]
- Sarkar, B.K.; Mandal, P.; Saha, R.; Mookherjee, S.; Sanyal, D. GA-optimized feedforward-PID tracking control for a rugged electrohydraulic system design. ISA Trans. 2013, 52, 853–861. [Google Scholar] [CrossRef]
- Phillips, C.L.; Nagle, H.T. Digital Control System Analysis and Design, 3rd ed.; Prentice-Hall: Eaglewood Cliffs, NJ, USA, 1995. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Techniques | Advantages | Drawbacks | References |
|---|---|---|---|
| CPVN feedback control |
|
| [12,13] |
| Adaptive control, boundary control, and LQR with Kalman filter control |
|
| [3,15,16] |
| Adaptive fuzzy fault-tolerant control, adaptive fuzzy funnel control, decentralized adaptive control, adaptive-neural control |
|
| [17,18,19,20,21,22,23] |
| SMC, adaptive-fuzzy SMC, adaptive SMC, PD SMC |
|
| [1,8,24,25] |
| PID, PID-R, and feedforward PID control |
|
| [35,36,37] |
| Description | Parameter | Value |
|---|---|---|
| Carriage and brass weights mass | 2.77 kg | |
| Viscous friction coefficient | 15.235 N/m/s | |
| Steady-state gain | 140 |
| Percentage Overshoot (%) | Settling Time (ms) | Rising Time (ms) | |
|---|---|---|---|
| 0.248 | 4.39 | 64 | 24 |
| 0.211 | 1.31 | 45 | 30 |
| 0.175 | 0.56 | 65 | 40 |
| Controller Type | Percentage Overshoot (%) | Settling Time (ms) | Rising Time (ms) |
|---|---|---|---|
| Discretized Phase-Lead | 4.18 | 200 | 59 |
| State-Feedback | 4.30 | 92 | 35 |
| Digital Phase-Lead | 0.75 | 116 | 74 |
| Digital PID | 0.55 | 57 | 36 |
| Virtual Instrument | Assigned Variable on SIMULINK |
|---|---|
| Plotter | HW Adj Gain1 |
| Check Button 1 | On/Off Gain |
| Check Button 2 | Closed-Loop Gain |
| Push Button | Encoder Reset Gain |
| Numerical Input | Output Gain |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Baidhani, H.; Kazimierczuk, M.K. Design and Implementation of Digital PID Control for Mass-Damper Rectilinear Systems. Mathematics 2024, 12, 2921. https://doi.org/10.3390/math12182921
Al-Baidhani H, Kazimierczuk MK. Design and Implementation of Digital PID Control for Mass-Damper Rectilinear Systems. Mathematics. 2024; 12(18):2921. https://doi.org/10.3390/math12182921
Chicago/Turabian StyleAl-Baidhani, Humam, and Marian K. Kazimierczuk. 2024. "Design and Implementation of Digital PID Control for Mass-Damper Rectilinear Systems" Mathematics 12, no. 18: 2921. https://doi.org/10.3390/math12182921
APA StyleAl-Baidhani, H., & Kazimierczuk, M. K. (2024). Design and Implementation of Digital PID Control for Mass-Damper Rectilinear Systems. Mathematics, 12(18), 2921. https://doi.org/10.3390/math12182921