Abstract
This paper is intended to study noise-to-state stability in probability (NSSP) for random coupled Kuramoto oscillators with input control (RCKOIC). A feedback control is designed, which makes us give the existence and uniqueness of a solution for RCKOIC. Based on Kirchhoff’s matrix tree theorem in graph theory, an original and appropriate Lyapunov function for RCKOIC is established. With the help of the Lyapunov method and by resorting to some analysis skills, NSSP for RCKOIC with an arbitrarily coupled topological structure and second-order moment process stochastic disturbance is acquired. Finally, the effectiveness of the obtained results is verified by a numerical test and its simulation process.
Keywords:
noise-to-state stability; random coupled Kuramoto oscillators; feedback control; Lyapunov method; Kirchhoff’s matrix tree theorem MSC:
45R05; 37H30
1. Introduction
The coupled Kuramoto oscillators (CKO) model proposed by Y. Kuramoto [1] is one of the most representative models for studying complex dynamical systems, which has been widely used in various fields due to its practicability, such as biology [2,3], chemistry [4,5], physics [6,7], and engineering [8]. However, in plenty of actual situations, CKO is always inevitably disturbed by external noise, which is simulated by many scholars using white noise as a diffusion form. Nevertheless, white noise is not well suited for the simulation of CKO in some physical environments, since it is not differentiable almost everywhere in theory, and the ideal white noise does not exist in practice because of its infinite bandwidth. From a practical standpoint, we typically use a stationary random process to replicate the external noise interference affecting CKO. Thus, general noise disturbances such as bounded noise and second-order moment processes are fully considered for CKO, which is ordinarily called random coupled Kuramoto oscillators (RCKO).
On the other hand, the practical application of RCKO mainly depends on its dynamic behavior. Therefore, in the past few decades, analyzing and controlling the dynamic behavior of RCKO to meet the expected requirements has beeb one of the hot issues in the scientific community. In order to achieve the desired stability in practical applications, feedback control methods have become one of the common means of controlling such stochastic coupled systems [9,10]. Based on the above deliberation, we examine the RCKO system with input control (RCKOIC) as described below:
where denotes the phase of the i-th oscillator, and refers to its natural frequency. Matrix represents the coupling configuration of RCKOIC (1), and stands for the coupling strength. Input control is represented by . The disturbance intensity is denoted by , and is a second-order moment stochastic process that is -adapted.
Noise-to-state stability is an extension from deterministic systems to stochastic systems, compared with the well-known input-to-state stability. However, as far as the authors know, there are few results to study the noise-to-state stability of RCKOIC (1) due to the following reasons: RCKOIC (1) has no theoretical framework results, such as the existence and uniqueness of solution theorem. And RCKOIC (1) is nonlinear, so it has very rich dynamic behavior. In addition, the dynamic behavior of RCKOIC (1) depends on not only each oscillator but also the coupling topological structure between them. And feedback control can be an effective means to help the system cope with random perturbations and maintain the stability and desired dynamic behavior of the system. Building on the aforementioned discussion, the primary objective of this article is to investigate noise-to-state stability in probability (NSSP) for RCKOIC (1).
The contributions of this paper can be summarized in the following three key aspects. Firstly, through a feedback control strategy designed by us, the existence and uniqueness of a solution for RCKOIC (1) is provided. Secondly, a novel Lyapunov function for RCKOIC (1) is developed utilizing Kirchhoff’s matrix tree theorem from graph theory. By combining the Lyapunov method with novel analytical techniques, we achieve NSSP for RCKOIC (1) under arbitrary coupled topological structures and second-order moment stochastic disturbances. Thirdly, a numerical example along with simulation results is provided to confirm the validity and applicability of our theoretical findings.
2. Preliminaries and Model Description
The following notations are used throughout the paper. is the n-dimensional real vector space, , and denotes the set of -dimensional real matrices. The superscript “T” stands for the transpose of the matrix or vector. Let and denote the norm of vector and matrix , respectively.
The probability space is considered, where denotes the expectation under , denotes a filtration meeting the standard requirements, and is the probability measure. Assume that a stochastic process vector defined on this entire probability space is . We define the set as . Likewise, is defined as and
. Definitions for other symbols will be provided as they are introduced.
A directed graph is widely recognized as a useful tool for describing RCKOIC (1). By utilizing a weighted directed graph with n nodes , where consists of a vertex set and a directed edge set, and the weight matrix represents the coupling structure of RCKOIC (1), we can effectively and clearly represent the dynamics of RCKOIC (1). Each vertex represents an oscillator in RCKOIC (1), and directed arcs between vertices depict the interactions between oscillators. Especially if , there is no interaction between the two oscillators. In addition, the related content of graph theory is more seen in [11,12]. Moreover, to make the readers more convenient, we write RCKOIC (1) in a more concise format as follows:
where the stochastic process is -adapted satisfying ,
and
At the end of this section, let us give two useful definitions and a lemma to close this part.
Definition 1.
The solution of RCKOIC (1) is a stochastic process, which is defined as , where is the initial phase, satisfying the following two conditions:
- 1
- is almost surely continuous with respect to t and -adapted, where , .
- 2
Definition 2.
Consider any , , and an initial condition . If there exist functions and such that
then, the RCKOIC is said to exhibit noise-to-state stability in probability (NSSP).
Lemma 1
(Kirchhoff’s Matrix Tree Theorem [11]). Let define as the cofactor of the i-th diagonal element in the Laplacian matrix of a weighted digraph . Then, we have
where denotes the collection of all spanning trees in the weighted digraph rooted at the vertex i, and represents the weight associated with . In particular, if is a strongly connected digraph, then .
3. Main Results
In this section, we present a theorem ensuring that RCKOIC (1) satisfies NSSP as outlined below.
Theorem 1.
Proof.
The proof of Theorem 1 is comparatively skillful. Thus, for the convenience of readers, we divide the proof into two parts.
Step 1: Above all, we manifest the solution of RCKOIC (1) is existent and unique for any .
(Existence). Together with feedback control designed above, by calculation, it yeilds
where . Then, we construct an iterative sequence as follows:
where represents the initial value. In terms of mathematical induction, one can derive
In accordance with the discriminant method of optimal series, apparently we can know that is uniform convergence. Obviously, when , the limit of exists, which is represented by . Therefore, we can obtain
Evidently, is -adapted so that is -adapted. After iteration, it is easy to see that is -adapted, so that is -adapted, and it is almost surely continuous for any . Combining with Definition 2, the solution of RCKOIC (1) exists.
(Uniqueness). We assume that and are both the solutions of RCKOIC (1). Let and . On grounds of , obviously we can know that a.s. Then, based on Bellman–Gronwall Lemma [13], let , we can see
which means the solution of RCKOIC (1) is unique.
Step 2: Soon afterwards, we show that RCKOIC (1) is NSSP.
It is clear that RCKOIC (1) is equivalent to the following system:
where , and sufficiently small positive real number satisfies . Then, we give the truncated system of system (3) as follows:
Now, we consider a Lyapunov function
where the positive constant , and denotes the cofactor of the i-th diagonal entry in the Laplacian matrix.
of the weighted digraph , and weight matrix . In the light of Lemma 1, we can know that .
Meanwhile, by applying the combination identity from graph theory (see [14], Theorem 2.2) and utilizing the fact that , taking the derivative of along the system trajectory of (4), we can conclude that
where represents the set of all spanning unicyclic graphs of , is the weight of , and denotes the directed cycle within . Differentiating along the trajectory of RCKOIC (1) gives
where , , and In line with condition (2) in Theorem 1, it is easy to derive . Taking the expectation of both sides of (5), in the light of Fubini’s theorem [15], we deduce
where and . Combining with (6) and Jensen’s inequality [16], it is easy to obtain
where and . According to (7) and Chebychev’s inequality [17], for any ,
where and . It is obvious that the inequality above is a complementary event of the condition in Definition 2, which means RCKOIC (1) is NSSP. Overall, the proof is accomplished. □
Remark 1.
In Theorem 1 we give the sufficiency criterion for the RCKOIC (1) to satisfy the NSSP, and since its criterion is based on the uniqueness of the existence of the solution, in this paper we complete the proof of the consistent convergence of the iterative sequence and the basis for the establishment of the criterion by constructing the iterative sequence and using the Bellman–Gronwall inequality. It is easy to see that RCKOIC (1) is asymptotically stable through our designed control when the stochastic process ξ disappears from Definition 1. Furthermore, if the condition satisfied by the stochastic process ξ is changed to , where d and λ are positive real numbers, the results in Theorem 1 still hold.
Remark 2.
One of the main factors affecting the dynamics of RCKOIC (1) is its coupled topological structure, which is studied by many scholars, giving some essential conditions such as strong connectivity [18] or weak connectivity [2]. However, in many practical applications, the coupled topological structure of RCKOIC (1) does not have these conditions. In this paper, the coupled topological structure of RCKOIC (1) is arbitrary, which makes it more widely used in practice.
4. Numerical Test
We illustrate the practicality and applicability of the proposed theory through a numerical simulation example.
The number of oscillators in RCKOIC (1) is . Next, we select the stochastic process , where random variable is a uniform distribution subject to . Obviously, we can deduce that is a wide stationary process and
Let
and natural frequency
Further, the gain coefficient in the feedback control we designed are
The coupling configuration matrix
The initial values are as follows:
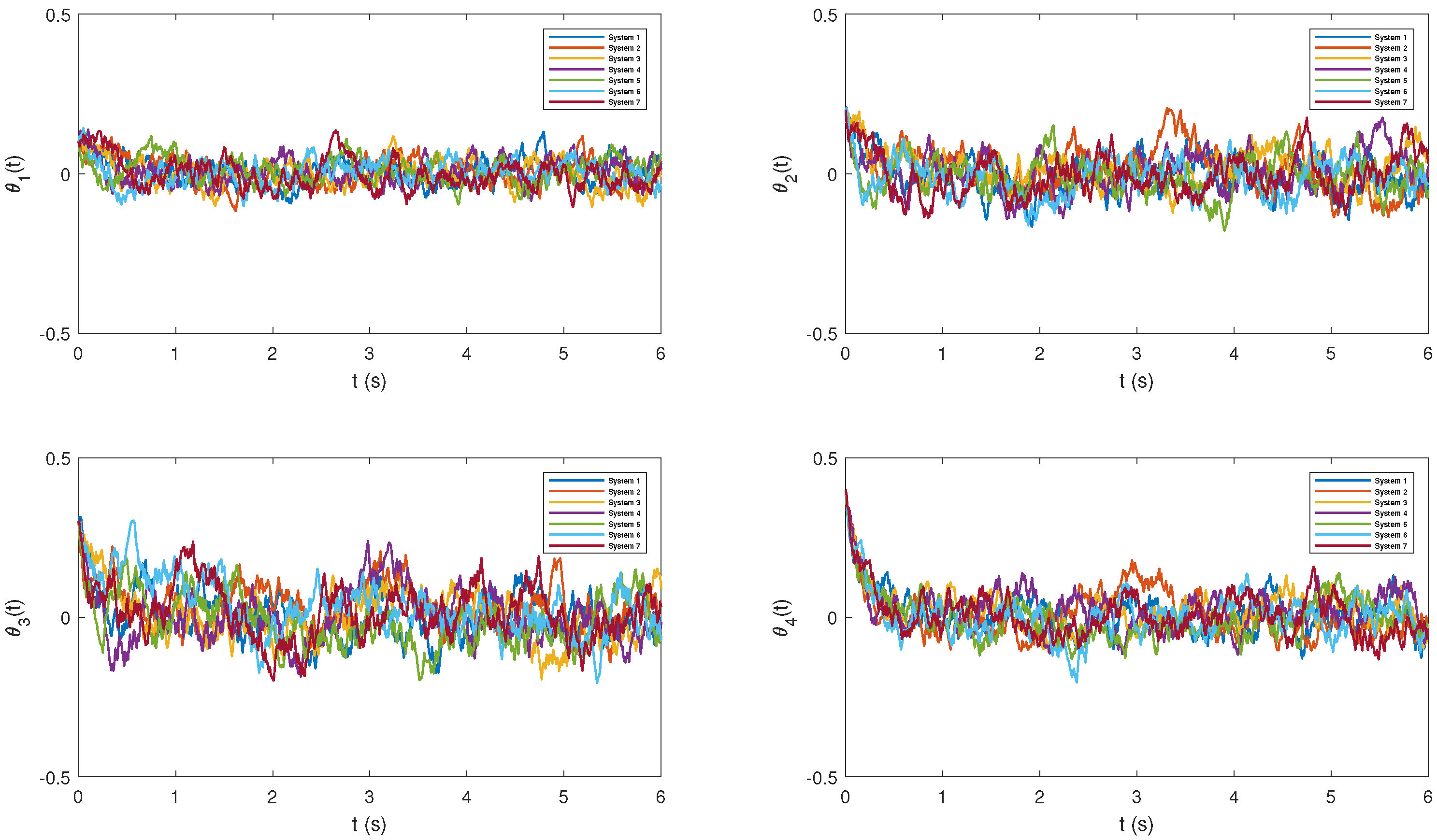
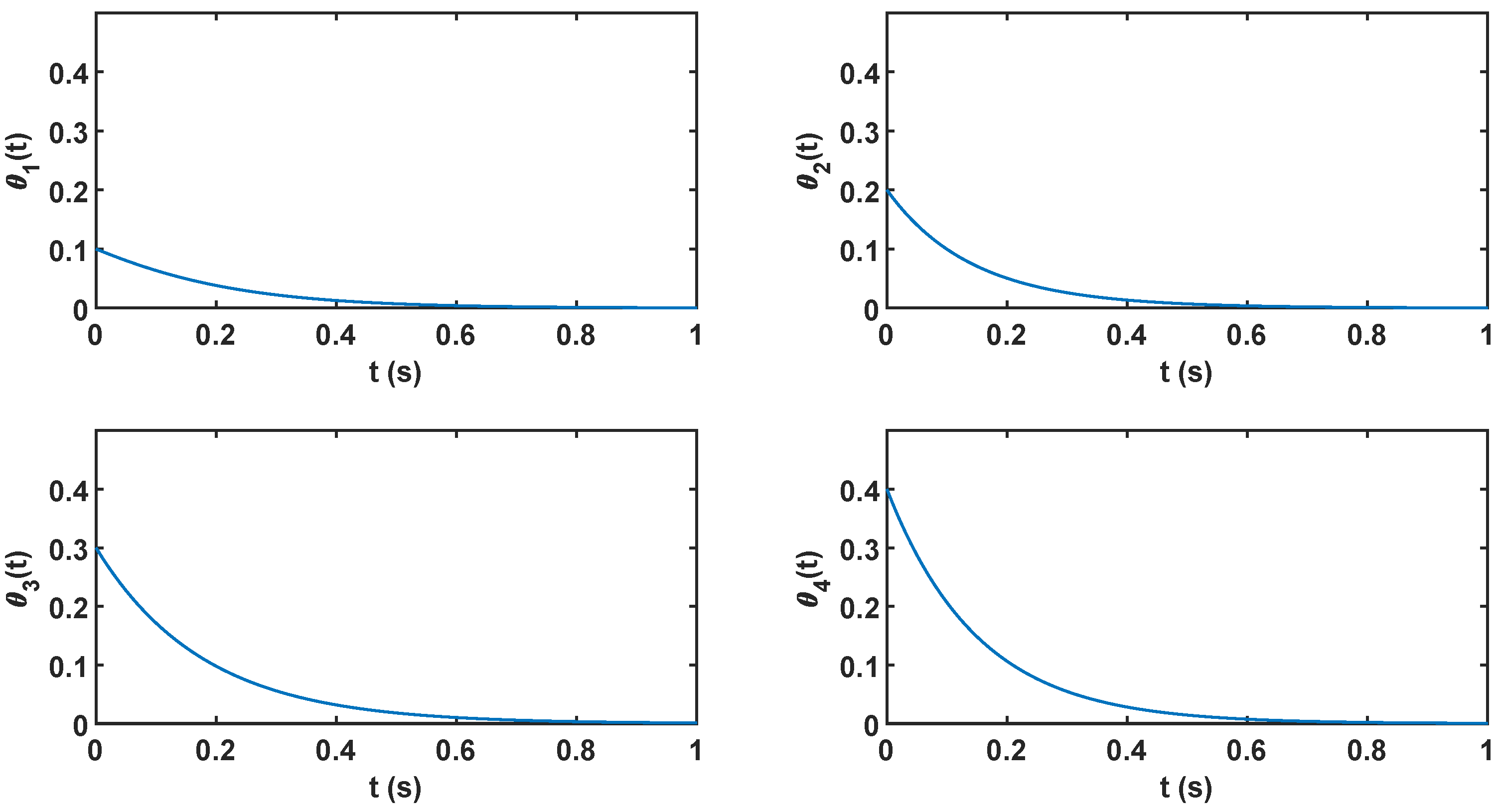
For the numerical simulation, we applied an iterative step size of and a total simulation time of s. Clearly, the condition (2) in Theorem 1 is satisfied. Thus, RCKOIC (1) is NSSP, which is exhibited in Figure 1. To make readers see more clearly the effect of stochastic process on RCKOIC (1), as a comparison, the state trajectory of the solution for RCKOIC (1) without stochastic disturbance is given in Figure 2.
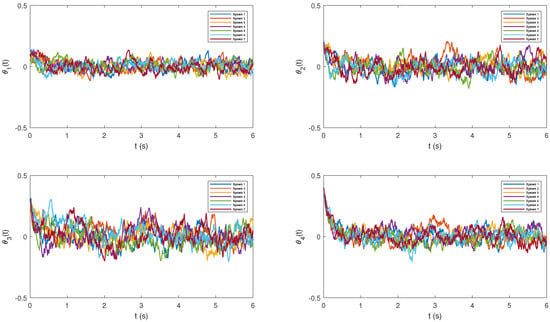
Figure 1.
The state trajectory of RCKOIC (1).
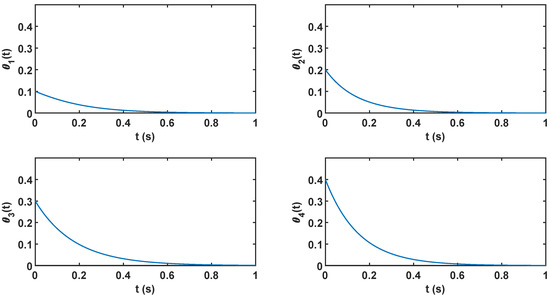
Figure 2.
The state trajectory of RCKOIC (1) without stochastic disturbance.
Through the theorem section of the article, we can see that the random disturbance intensity and the gain coefficient in the feedback control are two important factors affecting the stability of RCKOIC (1). In order to make the reader more intuitively feel this, next we explore the effect of changing these two variables on RCKOIC (1), respectively.
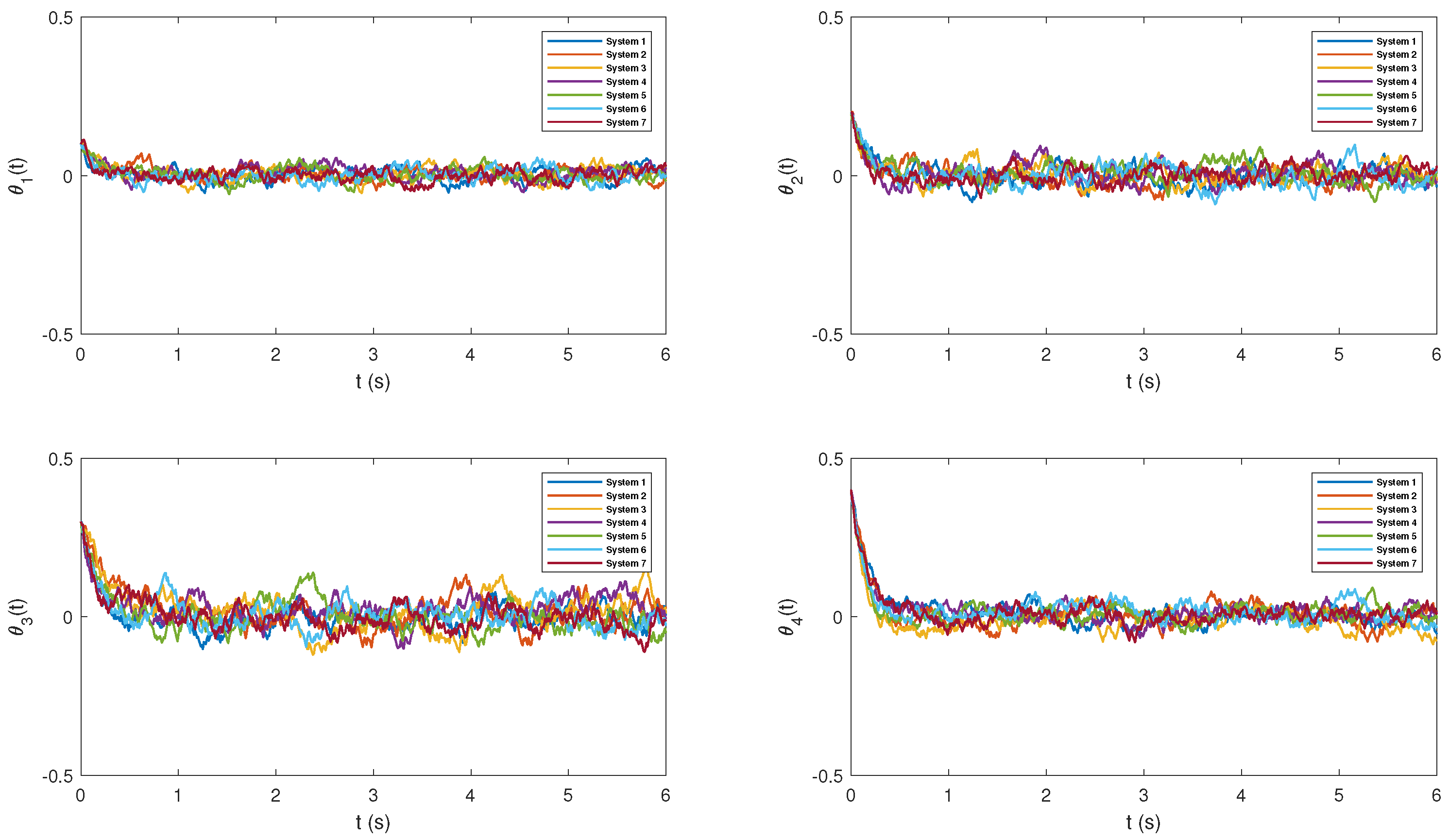
Firstly, the intensity of the random perturbation is reduced from the original randomly perturbed system, and variables such as gain coefficients and coupling relations are controlled to remain constant. Let
Figure 3 is obtained after going through the run.
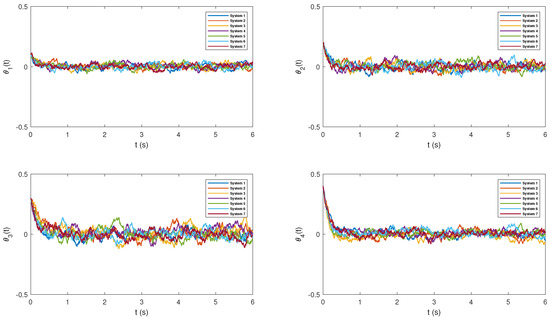
Figure 3.
RCKOIC (1) state trajectory after random perturbation intensity reduction.
At this point, condition (2) in Theorem 1 is also still satisfied, and RCKOIC (1) is NSSP. By comparing with Figure 1, it is obvious that the fluctuations of the state variables are relatively small and the trajectory is closer to a stable value or a smaller range of oscillations. This explains the fact that feedback control is more likely to maintain the stability of the system with smaller perturbations.
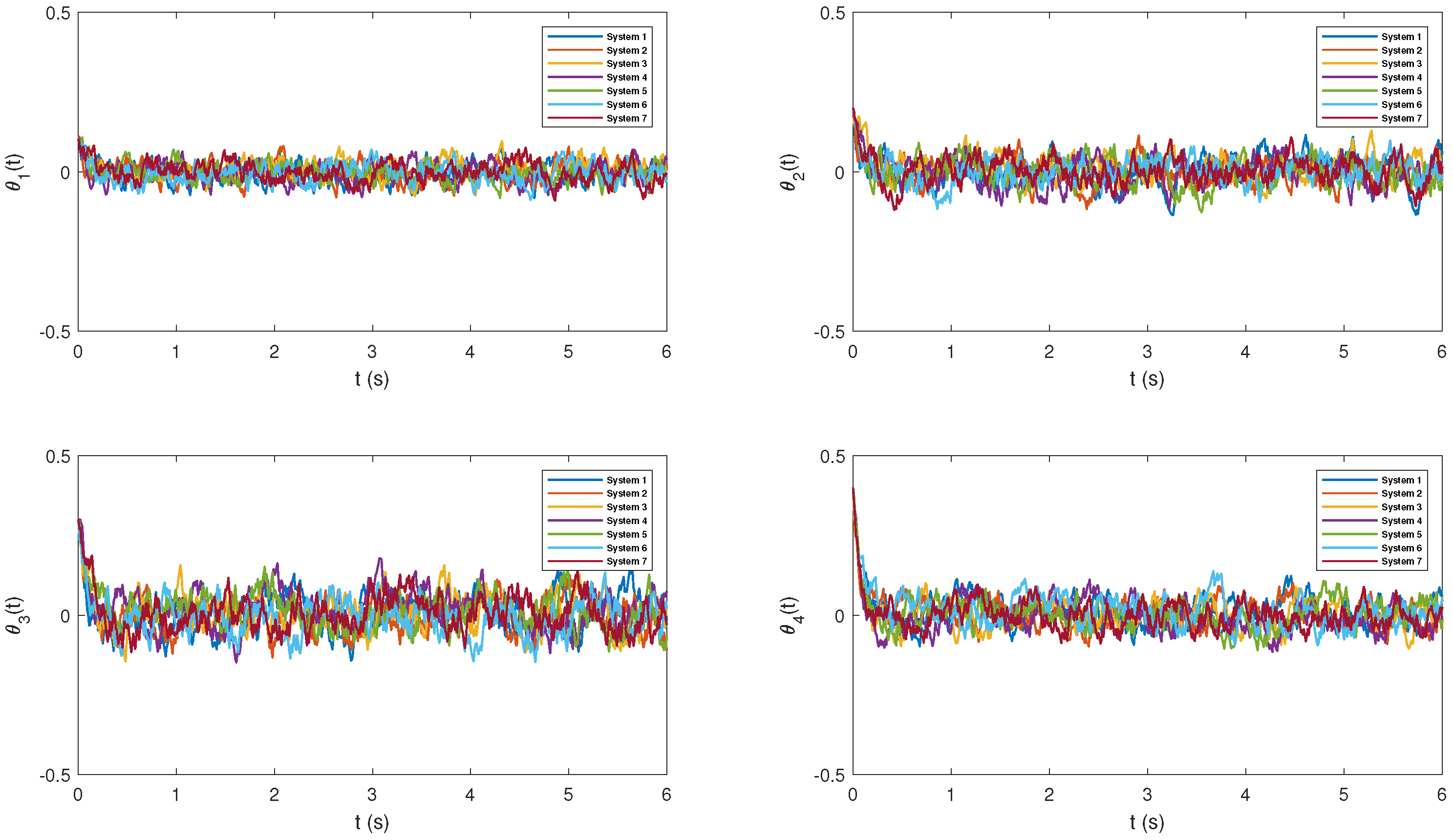
Subsequently, the gain coefficient in the feedback control of the system is increased based on the original stochastic perturbation system, and the variables such as the intensity of the stochastic perturbation and the coupling relationship are controlled to remain constant. Let
Figure 4 is obtained after going through the run.
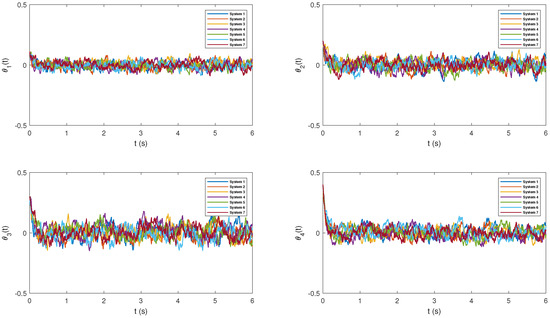
Figure 4.
The State trajectory of RCKOIC (1) as the coefficient increases.
At this point, RCKOIC (1) is NSSP. By comparing with Figure 1, a smoother trajectory appears, the range of fluctuation becomes smaller, and the system converges faster. This also indicates that the feedback control becomes stronger and the system is more likely to pull the deviated state back to the equilibrium position. In this case, even if there is a random perturbation, a higher is more effective in controlling the state variable to fluctuate within a smaller range.
5. Conclusions
In this paper, we design a feedback controller and construct appropriate Lyapunov functions for the RCKOIC (1) system based on Kirchhoff’s theorem in graph theory. By applying the Lyapunov method and stochastic techniques, the stochastic input-state stability (NSSP) of the RCKOIC (1) system under arbitrary coupling topology and second-order moments random perturbations is obtained. Finally, numerical examples and simulation results show that the feedback controller can effectively reduce the state fluctuations under random disturbances and make the system converge to equilibrium rapidly under disturbance-free conditions, which verifies the feasibility and validity of our theory. However, in real life, non-ideal connections between oscillators in the RCKOIC (1) system, finite signal propagation speeds, or other factors may lead to time delays, which affect the dynamic behavior of the RCKOIC (1) system. Therefore, it is important to consider the time delay in RCKOIC (1) systems, which is our future research direction.
Author Contributions
Methodology, N.T.; Writing—original draft, N.T.; Software, X.L.; Validation, R.K.; Formal analysis, C.P.; Visualization, J.L.; Writing—review and editing, S.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the Fundamental Research Funds for the Central Universities (No. 2572022BC04).
Data Availability Statement
Data are contained within the article.
Acknowledgments
The authors wish to express their sincere gratitude to the editors and anonymous reviewers for their valuable comments and suggestions.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Kuramoto, Y. Self-entrainment of a population of coupled non-linear oscillators. In International Symposium on Mathematical Problems in Theoretical Physics, Kyoto, Japan, 23–29 January 1975; Springer: Berlin/Heidelberg, Germany, 1975; pp. 420–422. [Google Scholar]
- Nguyen, P.T.M.; Hayashi, Y.; Baptista, M.D.S.; Kondo, T. Collective almost synchronization-based model to extract and predict features of EEG signals. Sci. Rep. 2020, 10, 16342. [Google Scholar] [CrossRef] [PubMed]
- O´dor, G.; Kelling, J. Critical synchronization dynamics of the Kuramoto model on connectome and small world graphs. Sci. Rep. 2019, 9, 19621. [Google Scholar] [CrossRef] [PubMed]
- Gupta, S.; Zangrando, V.; Matijašević, L. Kuramoto model of coupled chemical oscillators: The effect of time-delay on synchronization. J. Chem. Phys. 2022, 157, 044108. [Google Scholar]
- Forrester, D.M. Arrays of coupled chemical oscillators. Sci. Rep. 2015, 5, 16994. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Zhang, D.; Li, Z.; Wang, Q.; Yu, D. Overviews on the applications of the Kuramoto model in modern power system analysis. Int. J. Electr. Power Energy Syst. 2021, 129, 106804. [Google Scholar] [CrossRef]
- Arinushkin, P.A.; Vadivasova, T.E. Nonlinear damping effects in a simplified power grid model based on coupled Kuramoto-like oscillators with inertia. Chaos Solitons Fractals 2021, 152, 111343. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W. A theory of solvability for lossless power flow equations—Part II: Existence and uniqueness of high-voltage solutions. IEEE Trans. Control Netw. Syst. 2019, 6, 1117–1131. [Google Scholar]
- Naik, P.A.; Amer, M.; Ahmed, R.; Qureshi, S.; Huang, Z. Stability and bifurcation analysis of a discrete predator-prey system of Ricker type with refuge effect. Math. Biosci. Eng. 2024, 21, 4554–4586. [Google Scholar] [CrossRef]
- Naik, P.A.; Javaid, Y.; Ahmed, R.; Eskandari, Z.; Ganie, A.H. Stability and bifurcation analysis of a population dynamic model with Allee effect via piecewise constant argument method. J. Appl. Math. Comput. 2024, 70, 4189–4218. [Google Scholar] [CrossRef]
- West, D.B. Introduction to Graph Theory, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Biggs, N.; Lloyd, E.K.; Wilson, R.J. Graph Theory, 1736–1936; Oxford University Press: Oxford, UK, 1986. [Google Scholar]
- Dragomir, S.S. Some Gronwall Type Inequalities and Applications; Nova Science: Hauppauge, NY, USA, 2003. [Google Scholar]
- Li, M.Y.; Shuai, Z. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef]
- Billingsley, P. Probability and Measure; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Krantz, S.G. Handbook of Complex Variables; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Mao, X. Stochastic Differential Equations and Applications; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Zhang, J.; Zhu, J. Exponential synchronization of the high-dimensional Kuramoto model with identical oscillators under digraphs. Automatica 2019, 102, 122–128. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).