Abstract
Effective last-mile (LM) delivery is critical to the efficient functioning of supply chains. In addition to speed and the cost of delivery, environmental and social sustainability are increasingly important factors in last-mile logistics (LML), especially in urban areas. Sustainable solutions such as drones attract special attention from researchers due to their high potential. The future of drone logistics is uncertain due to many barriers. This study analyzes, evaluates and ranks barriers to identify those that most significantly hinder broader drone adoption in LML, and proposes and ranks strategies to overcome them. This type of issue requires the involvement of multiple stakeholders with conflicting goals and interests. Therefore, the study employs a novel hybrid multi-criteria decision-making (MCDM) model that combines fuzzy Delphi-based fuzzy factor relationship (Fuzzy D-FARE) and fuzzy comprehensive distance-based ranking (Fuzzy COBRA) methods. The results indicate that the main obstacle to drone implementation in LM is the lack of aviation regulations. The risks of unauthorized access, data misuse, privacy breaches, and data security represent significant challenges. They are followed by ambiguously defined or burdensome requirements for insurance and liability for drone owners. The main contributions of this study are the establishment of a novel hybrid model, identification and ranking of barriers for broader application of drones in LML, and strategies for overcoming them.
Keywords:
drone logistics; barrier analysis; last-mile; city logistics; MCDM; fuzzy Delphi; fuzzy FARE; fuzzy COBRA MSC:
03B52; 90B50
1. Introduction
Logistics is essential for the functioning of a city as a location with the greatest concentration of people and economic and social activities. Therefore, city logistics (CL) is a critical area of planning due to its close connection with the sustainable development of urban areas [1]. Globalization, the growth of the consumer society, the change in the production paradigm, the development of Industry 4.0, and the development of e-commerce cause various challenges in achieving efficient and sustainable logistics, especially in urban areas [2]. The consequence of the aforementioned is fragmentation of the market, an increase in home deliveries, an increase in the demand for more rapid deliveries, an increase in the frequency of delivery, a decrease in the volume of delivery, as well as the occurrence of personalized consumption patterns [3], which significantly complicate the last-mile logistics (LML) processes. LML is the last stage of the supply chain where contact with the final consumer is made. It is often described as the most complex, expensive, inefficient, and polluting part of the supply chain [4]. Some studies estimate that last-mile (LM) delivery accounts for 13–75% of total supply chain costs, depending on the influence of various factors [5]. These include the complexity of the urban environment and the adaptability of the infrastructure to the operations of logistics providers, the occupancy rate of delivery vehicles, restrictions imposed by local authorities, the distance of delivery, the size and homogeneity of shipments, the required delivery times, traffic congestion, etc. In addition to the impact on economic sustainability, ineffective planning and management of LML harms environmental and social sustainability due to the creation of congestion, air pollution, and increased noise, reducing traffic safety and damaging the network infrastructure.
According to research from the World Economic Forum in 2020, the number of deliveries in cities is expected to increase by 36% by 2030, which will generate a 32% increase in greenhouse gas emissions from delivery traffic, an increase in congestion by over 21%, and an additional 11 min of commuting for every passenger on a daily level. These figures indicate substantial importance, but also the pressure put on the logistics sector in cities. Therefore, understanding LML, as well as its effective planning and management, is of vital importance for obtaining the economic, environmental, and social sustainability of cities. Notwithstanding the problems found in changes in supply chains, technological innovations enable the application of modern solutions for LM delivery. In addition to the rate and cost of delivery, which are the most influential factors for LML, environmental and social sustainability are taking on an increasingly important role. From this perspective, solutions such as autonomous vehicles and drones as a type of these vehicles can be a good choice both in terms of transport speed and sustainability. Being electrically powered, drones may reduce environmental impact and mitigate road congestion as they do not interfere with land infrastructure [6]. Despite its potential advantages, the usage of drones is not widespread, and its future is uncertain due to several barriers such as regulations, legislation, a threat to privacy, security, public and psychological perception, and environmental, economic, and technical issues.
This paper analyzes barriers to drone implementation in LML, focusing on conflicting demands from various stakeholders (service providers and users, city and regulatory bodies, the public, and residents), and proposes strategies for their effective overcoming. The aim is to rank the barriers by identifying those that most significantly hinder broader drone implementation in LML and to propose and rank strategies for their elimination. When addressing this issue, it is necessary to achieve a compromise between conflicting demands, which manifest within the problem’s structure as a set of criteria for evaluating alternatives, i.e., barriers to drone implementation, and strategies for their elimination. To solve this multi-criteria decision-making problem (MCDM), a hybrid model combining the fuzzy Delphi-based fuzzy factor relationship (Fuzzy D-FARE) and fuzzy comprehensive distance-based ranking (Fuzzy COBRA) methods was used in this study.
The rest of the paper is organized as follows. Section 2 provides a literature review on city logistics, barriers for drone implementation in LML, and MCDM methods used in this study. This is followed by Section 3, i.e., the combination of Fuzzy MCDM methods for determining criterion weights, i.e., the importance of barriers to drone implementation, and for ranking the alternatives, i.e., strategies for overcoming them. Section 4 elaborates on the problem, outlining barriers and strategies. Section 5 presents the obtained results and conducts sensitivity analysis, while Section 6 discusses the significance and implications of the results obtained. Finally, the conclusions and recommendations for future research are presented in Section 7.
2. Literature Review
The literature review in this field emphasizes the importance of researching new strategies and technologies, highlighting the application of drones as a potential solution to overcome urban traffic congestion and optimize LML. An analysis of the current state and challenges in city logistics enables the identification of efficient strategies and technological solutions that will boost the efficiency of deliveries in urban environments. Furthermore, the use of MCDM methods contributes significantly to understanding and ranking key barriers affecting the adoption of innovations in this domain and strategies for overcoming them.
2.1. City Logistics and Last-Mile (CL and LM)
CL and LML are newer research areas that had a significant increase in academic interest in recent years. The oldest identified article in these fields was published in 2001, and until 2012, the publication rate was low. However, since 2013, the interest in CL and LML has been growing due to escalating challenges in achieving efficient and sustainable logistics, especially in urban settings [4]. Globalization, urbanization [3,7], the growth of consumer society, changes in consumer behavior [8,9], the development of innovations and Industry 4.0 [10], the rise of e-commerce [8,11], demands for environmental and social sustainability, and other social trends are intensively reshaping and complicating logistics requirements. Consequently, there is a growing need for a comprehensive understanding of CL and LML, which can explain the exponential growth of publications in these areas [3,12].
There are numerous definitions of LML. It can be described as planning, managing, and controlling the transportation and storage of goods from order penetration to the final consumer. More broadly, LML represents the part of the supply chain between the last distribution center and the end consumer [5,11,13]. LMLs are often depicted as one of the most costly, inefficient, and environmentally impactful parts of the supply chain [14], whose efficiency relies on various factors such as consumer density and timeframes [15], traffic congestion [16], delivery fragmentation [17], shipment size, and heterogeneity [18]. LML significantly impacts greenhouse gas emissions [19,20], air pollution [10], noise [21], and traffic congestion [14]. To enhance the economic, environmental, and social sustainability of LML, a better understanding of it is necessary [4].
The literature on LML covers a wide range of topics, indicating that the LM surpasses the boundaries of a single discipline and highlights the complexity of this research field [4]. A significant portion of publications focuses on the operational optimization of LML, in particular, on vehicle routing issues [22]. Some examples include the routing of electric vehicles [23,24,25], drone routing [26,27], and routing problems related to “roaming delivery locations” vehicles [28]. Additionally, a substantial part of the literature concentrates on new technologies and innovations, including innovative vehicle solutions such as electric vehicles [29,30], bicycles [31], tricycles [32], and drones [33]. Some studies compare different vehicle solutions [9,34] and explore integrating vehicle types with various energy consumption, emissions, and costs [35], aiming to reduce LML costs and greenhouse gas emissions through integration. Special attention in the literature is given to Collection and Delivery Points (CDPs), representing a concept in city logistics that allows goods to be delivered directly to specific micro-hubs rather than to the end user’s address. This alternative to doorstep delivery speeds up and simplifies the delivery process, reducing the risk of failed deliveries and the number of deliveries to end-user addresses, collectively contributing to a reduction in greenhouse gas emissions [36,37]. Some examples in the literature include studies on unmanned deliveries [38], solution comparisons [39,40,41], as well as the evaluation of consumer self-service technology (parcel lockers) [34], consumer acceptance [9], and optimal placement [42]. Publications related to LML also encompass topics concerning various applications of different business models and their combinations, especially in “crowd” logistics [43,44,45]. Some studies describe perspectives on collaboration among various stakeholders in LML [46,47], with results that can be achieved through such collaboration [48,49,50].
2.2. Application of Drones in CL (LML)
Alongside economic considerations, many studies emphasize exploring ecological and social dimensions of LML sustainability [51]. Due to their speed, flexibility, cost-effectiveness, low greenhouse gas emissions, and other advantages, drones can become a pivotal technology of the 21st century, with multiple applications across various domains, ranging from security, geodesy, and agriculture to transportation and logistics [52]. Studies cover available drone technologies [53], drone routing [26,27], drone applications in LML, future development directions, and consider drones as a new form of mobility, given their combination of three technological principles: data processing, autonomy, and mobility [54]. Although there are some significant academic studies on delivery drones [55] and their adoption in LML [56,57], research on barriers to the implementation and adoption of drones by end consumers is scarce and, to the best of the authors’ knowledge, there are no studies dealing with the strategies for overcoming these barriers.
Drones were initially developed for military operations due to the dangers and risks to crewed aircraft [58], but have since found a wide range of efficient applications in healthcare [59], agriculture [60], construction [61], security [62], mining [63], filming [64], science and research, data collection [65], humanitarian activities [66], military operations [67], mapping, and geodesy [68].
Various advantages and disadvantages of drone delivery in urban environments are described in the literature. Some examples explore the efficiency of combining drones and trucks [69], comparing this combination’s effectiveness against individual drone or truck deliveries [70]. Researchers are particularly interested in drone routing issues due to multiple trips from/to warehouses, limited battery life [26], and coverage area constraints [71]. Additionally, drone delivery may involve cyber or physical attacks on drones aimed at disrupting deliveries [71]. Some researchers have proposed drones for medication delivery [72] and organ transportation [73] to promote timely, economical, and efficient healthcare. Drones raise concerns about people’s privacy and security [74] as well as causing psychological stress for some individuals due to data security issues [75]. While drones are presented as environmentally friendly solutions in most studies, contradictory claims exist when the customer is far from the service depot. In such cases, drones may generate higher CO2 emissions than trucks [76].
2.3. The Hybrid Delphi-Based Fuzzy FARE and Fuzzy COBRA Model
This paper proposes a novel hybrid MCDM model that integrates Fuzzy D-FARE and Fuzzy COBRA methods to analyze and rank barriers and strategies for overcoming them while considering conflicting demands from various stakeholders. The Fuzzy Delphi method consolidates diverse user assessments, while the fuzzy FARE method evaluates and ranks barriers to drone implementation in LML, aiming to determine priorities for their resolution. Subsequently, Fuzzy COBRA is introduced to identify the best strategies and propose solutions to overcome barriers to implementing drones in LML.
The Delphi method was developed by Helmer and Dalkey [77], experts at the RAND Corporation in California, in the 1950s. The Delphi method is not solely intended for iteratively processing decisionmakers’ opinions until consensus is reached on the research subject [78] but also for the rational and systematic assessment of experts, regardless of their subjective views and biases. The Delphi method is employed when problems are extensive, complex, and multidisciplinary; when there is uncertainty in the decision-making process and a short time frame for decision making; when decisionmakers’ anonymity is desirable, etc. [79,80]. The Delphi method is essentially an interactive approach based on surveys and feedback. Experts are surveyed about a question or issue, and their responses are used to create a new survey. These iterative surveys continue until consensus is achieved or until a saturation point of responses is reached.
The Delphi method aims to provide significant and precise assessments of future trends and events and offer a platform for coordinating and consolidating expert opinions. The advantages of the Delphi method include anonymity (allowing participants to express their views without fear of discrimination or pressure), iterativeness (supports multiple repetitions to achieve convergence of assessments), controlled feedback (providing participants with objective information about other participants’ opinions to revise and update assessments), and statistical grouping (enabling the evaluation of group opinions, which can yield reliable results) [79]. The disadvantages of the Delphi method include the need for multiple repetitions (requires several rounds of questionnaires to achieve convergence of assessments, which can be time consuming and costly) and high data collection costs (especially for large and complex problems) [79].
The Delphi method has broad applications and is used in various fields for market research and assessing future market trends and needs; for technology development and assessing future trends and opportunities in technologies; for strategic planning as decision making support and long-term planning in different industries, including energy, education, and healthcare; for assessing potential risks and consequences of different scenarios; etc. Recently, the Delphi method has been applied, either alone or in combination with other methods, in conventional forms or within a fuzzy environment, for assessing renewable energy development projects [80], for locating dry ports and intermodal terminals [79,81], for selecting facility layouts in manufacturing systems [82], for defining typical structures of intermodal terminals [81], and for a comprehensive assessment of battery energy storage systems [83].
The FARE approach, as introduced in [84], is based on delineating connections among decision-making elements, most often the criteria. In its initial phase, the method requires a set of data from decisionmakers to identify the influences among individual decision-making elements, including their type and intensity [85]. The influence between the remaining elements is analytically determined in the subsequent phase, significantly diminishing the number of assessments needed from decisionmakers. The main advantages of the method, compared to the other methods based on the pairwise comparison of decision-making elements (such as AHP, ANP, and DEMATEL), are a small number of necessary evaluations, elimination of contradictions that occur in the comparison matrices, high reliability, consistency, and stability of the obtained results [85,86,87]. Beyond its conventional application, the FARE method extends into the fuzzy environment [88]. The FARE method’s advantages make it widely used alone or combined with other methods in conventional or fuzzy/grey environments for solving diverse problems. Some of the most recent applications are for selecting intermodal terminal subsystem technologies [89], ranking key drivers for e-traceability in agricultural food supply chains [90], LM solutions prioritization [91], assessment and choosing of third-party logistics providers [88], etc. This study combines the Delphi and FARE methods in a fuzzy context, aiming to combine their strengths into a unified method for extracting criteria weights.
On the other hand, the COBRA method [92] employs a distinctive strategy of ranking alternatives based on their comprehensive distances from three solution types: positive ideal, negative ideal, and average [93]. Unlike other distance-based methods, which typically utilize a maximum of two solutions, COBRA uses Euclidean and Taxicab distance measurements to calculate distances for all solution types. In addition to these three solutions, four distance groups are derived: distances from the positive and negative ideal solutions and positive and negative distances from the average solution. The method’s comprehensiveness, resulting from the multiple distance measures from various solutions, ability to find compromise solutions, high stability, user friendliness, and a nuanced differentiation of alternative distances, thereby enhancing the reliability of the derived solutions, were the main reasons for using the COBRA method in this study [94].The Spearman correlation index proves the COBRA method’s high consistency with other commonly used MCDM methods [92]. However, its complexity, resource requirements, time-intensive nature for obtaining results, and limitations in handling imprecise and ambiguous evaluations by decisionmakers are identified as primary drawbacks [92]. Although relatively new, the COBRA method has been widely applied in the literature, e.g., for assessing the applicability of Industry 4.0 technologies in reverse logistics [92,93] and circular economy concepts [94], and for selecting an e-commerce development strategy [95].
A hybrid MCDM model refers to an approach that combines different methods or techniques to address decision making problems involving multiple criteria. The goal is to leverage the strengths and diminish the weaknesses of various MCDM methods to enhance the overall decision-making process. Some common elements of a hybrid MCDM model are the integration of multiple MCDM methods, a complementary nature, possible customization for specific applications, flexibility, and adaptability. The examples of applying hybrid MCDM models in the literature are numerous. Some of the most recent ones include combinations of fuzzy LOPCOW and FUCOM methods [96], fuzzy DEMATEL and VIKOR methods [97], MEREC, SWARA, and COPRAS methods [98], Delphi, AHP and DEMATEL [99], etc. For the above reasons, a hybrid model that combines Delphi, FARE, and COBRA methods is proposed in this paper. The FARE and COBRA methods are selected for solving the problem in this study due to their characteristics and aforementioned advantages over some other MCDM methods. Since the criteria are evaluated by multiple representatives of various stakeholders, the Delphi method is employed for obtaining unified evaluations. In addition, all criteria are qualitative and all evaluations of criteria and alternatives are performed by stakeholders’ representatives who often provide vague and imprecise judgments. This introduces uncertainty in the decision-making model. Several theories, such as probability theory, interval mathematics, and fuzzy set theory, have been developed to manage uncertainties in real-life problems, among which the last one is particularly significant [100]. Fuzzy evaluations in MCDM methods enhance decision making by allowing for flexible representation of uncertainties, incorporating subjective judgments, dealing with ambiguity, and providing a nuanced expression of preferences [101]. The combination of Delphi, FARE, and COBRA methods in fuzzy or any other environment has never been used in the literature for solving this or any other problem. This is one of the gaps this paper is trying to bridge.
3. Description of the Problem
Delivery of goods by drones represents an innovative, promising, and significant solution to many problems in LML, which impacts all participants and stakeholders. Customer demand complexity increases due to the requirements for availability of the desired product and the rate of delivery [102] which can be answered by efficient drone delivery [103], contributing to a decrease in delivery costs, emissions, and traffic congestion in cities. However, it should be taken into account that the application and acceptance of drones for goods delivery depends on many factors that must be further investigated and resolved.
Existing studies on consumer acceptance of delivery drones reveal that privacy and sensitive personal data risk are among the primary challenges to accepting drone delivery technology [57]. In addition, security risk, fear of drones falling, and risk of injury or loss of personal belongings influence the acceptance of new technology, while innovation and environmental acceptability are the main reasons for its adoption [56,104].
Previous research has identified barriers to implementing drones that may be grouped into several categories [105]: privacy and security, regulations and legislation, public acceptance, and psychological perception, environmental issues, economic aspects, and technical issues.
Privacy and security (Ps): The commercialization of drones may pose a threat to public privacy, particularly in the context of delivery by drones that may be equipped with cameras and other sensors that can collect data about people and objects on the ground, which might lead to:
- Identity theft and collection of private information (Ps1);
- Unauthorized non-consensual photographing and recording (Ps2);
- Unauthorized usage of data and blackmail (Ps3);
- Complex identification of unauthorized drones (Ps4);
- Unauthorized usage of drones (Ps5);
- Violations of rights (Ps6);
- Physical attacks, obstruction, and phishing (Ps7);
- Intentional hacking, cyberattacks, and terrorism (Ps8).
Many people resist drones due to concerns about their privacy or safety and the possibility of photographing, recording, and monitoring private spaces without consent. In addition, it is complex to identify unauthorized drones and determine when and who is performing filming [106].
Drones used for logistics applications may effectively deliver products to customers. Although they are primarily used only to collect basic information about the route and location of the delivery [107], they may additionally collect other data: information about customers, their addresses and locations of movement, the products they buy, payment card information, the environment, etc. However, these data may be used without the owner’s consent, and in this way, the privacy and security of the user may be endangered. Given that drones can be easily accessible, there is concern that they might also be used without authorization to carry out illegal activities such as spying and the transfer of substances (drugs, dangerous substances).
In addition to being used in logistics applications, drones may be used for other purposes, including terrorist activities, posing a risk to national security. They may be programmed to transport explosive devices or weapons and can be used to execute attacks on public places or critical infrastructure. Drones may be misused for cybercrime purposes. Drones may be hacked, allowing attackers to take control of them and perform cyber attacks on systems in the drone’s operating zone [108,109], i.e., obtaining personal information, such as credit card information and other sensitive data. Drone transportation management systems are also vulnerable to cyberattacks that may be utilized to take control of drones and steal sensitive information about the flight and other drone operations, which may lead to collisions between drones, collisions with other objects and/or people, and generate serious incidents.
Regulations and legislation (Rl): The government is responsible for regulating the use of drones in the delivery of goods in urban areas to protect the interests of the community and ensure the safety and privacy of residents [106]. The regulation of drone delivery aims to prevent possible accidents and property damage due to drone crashes or collisions with other objects, as well as to protect citizens’ privacy and prevent unauthorized surveillance that might be performed using drones. Several barriers may affect the implementation of drones in LML, and they are related to regulations and legislation [105]:
- Liability for drone owners (Rl1);
- Drone routes (Rl2);
- Insurance obligations (Rl3);
- Operator certifications and training (Rl4);
- Congested airspace for manned aircraft (Rl5);
- Establishing liability (Rl6);
- Lack of aviation regulation (Rl7).
Restrictions on the use of drones in certain airspace zones or altitudes and restrictions on the weight and size of drones may make it hard to utilize drones for LM deliveries in urban areas. There are concerns that drones might pose a safety and security risk to air traffic, given that they might fly near manned aircraft, especially in urban areas, where airspace may be congested with scheduled commercial flights. Determining liability may be a barrier to implementing drones in LML, as it brings the issue of liability in the event of accidents or damage to attention and which regulations govern this.
In addition, the use of drones for LM delivery may require special permits, training, certifications, and licenses to operate drones, which requires additional time and resources. Drone owners are often liable for damage or accidents that occur during the usage of drones, and this presents a challenge in terms of insurance and other measures to protect against potential damages.
Non-compliance with aviation and other regulations with new technologies and innovations may lead to uncertainty regarding the legal framework and make it challenging to plan and implement an effective drone strategy. The lack of aviation regulation may also lead to disparate market conditions between companies that use drones and those that do not, which affects competitiveness and innovation.
Determining liability may be a barrier to implementing drones in LML, as it brings the liability to attention in the event of accidents or damage and which regulations govern this.
Public acceptance and psychological perception (Pp): According to a Polish study, 43% of the population expressed skepticism about the implementation of drones, implying the existence of social barriers to the adoption of drone delivery of goods [110]. Other studies in urban areas in Australia point out that traditional postal services are preferred over drone delivery despite recent advances in e-commerce and technology [111]. Societal anxiety about automation contributes to skepticism towards drones [105], particularly the perception that they are mainly intended for military and surveillance purposes and/or are owned by terrorist groups [75]. Additionally, people express strain that using drones might lead to the disappearance of traditional retail, resulting in a decrease in vacancies, increased stress levels, decreased social interactions, and the creation of an elite mode of mobility [112]. Social inequality is considered another significant barrier to the implementation of drone delivery due to the anxiety that drones would be available only to the wealthy [113]. In addition, social anxiety and security concerns are caused by the so-called cyber security of drones [109,114]. Intolerance towards the usage of drones may be further reinforced by users’ distrust of automation and technology and the anxiety of the drone or the package being carried falling, posing a potential risk to them. Additionally, the inability to distinguish drones in the sky, i.e., non-transparency, can lead to mistrust towards drones and further rejection of their usage, as it may not be possible to distinguish between a drone used for commercial purposes and a drone used for illegal activities or terrorist attacks.
In the literature, barriers related to public acceptance and psychological perception are divided as follows [105]:
- Greater perceived risk (Pp1);
- Awareness of drone technology (Pp2);
- Non-transparency (Pp3);
- Social anxiety about automation (Pp4);
- Annoyance of the public (Pp5);
- Usage of drones in the private sector (Pp6);
- Drones and theft (Pp7).
Environmental issues (En): The attitude of users towards the delivery of goods by drone largely depends on the extent of their impact on the environment. Large-scale deployment of drones has been found to reduce pollution more effectively in rural than urban areas [115].
Drones cause noise pollution, CO2 emissions, and visual pollution [116,117,118,119]. Drones can be powered by engines that emit gases into the atmosphere, including CO2 and other harmful gases. The amount of CO2 emissions produced by drones is relatively low compared to other types of transport, such as internal combustion vehicles. However, if drones are used on a large scale, emissions may gradually accumulate and contribute to the total emissions, especially if drones travel longer distances [76].
Studies that tested the impact of drone noise near busy and less busy roads show that sound disturbance on busy roads is concealed by traffic noise and is only 1.13 times higher than without drone noise, compared to less busy roads where sound disturbance generated by drones is 6.4 times higher. Thus, planning drone routes near busy roads would significantly reduce noise pollution [120].
Shadowing is another impact that drones pose on the environment [109]. Since drones fly above the ground, they may produce sounds and noise that may affect animals and people nearby. In addition, the shadows of drones in flight may cause “visual pollution” and disrupt people and animals on the ground. Adverse weather conditions (wind storms, snow storms, poor visibility, and thunderstorms) seriously challenge undisturbed delivery with drones [113,121].
Research suggests that drones may affect animals differently [114,122]. For example, flying drones may disturb birds and alter their natural behavior. Moreover, birds and other animals may be physically harmed during collision with drones [106]. There are additional concerns that flying drones might affect the migration of birds since they use sound as a navigation tool. Therefore, drone noise may disrupt their ability to navigate. Hence, it is vital to use drones responsibly, in compliance with legislation and regulations, to minimize the negative impact on animal life.
Accordingly, when considering the usage of drones for LM delivery, the environmental impact should also be taken into account [105]:
- CO2 emission CO2 (En1);
- Impact on animals and birds (En2);
- Visual and sound pollution (En3).
Economic aspects (Ec): Although drones may be more efficient and decrease costs compared to traditional delivery methods, economic challenges should also be considered. Investing in drones and related technologies can be costly. In addition to the drone itself, it is necessary to make further investments in software, sensors, surveillance cameras, and other technologies required for the safe and efficient operation of the drone. Moreover, operator training and certification costs imply additional resources and expenses.
As with other technological innovations, introducing drones in the logistics industry may lead to changes in the labor market. Although package delivery drones create new vacancies, reducing the use of trucks and other vehicles in logistics may reduce the need for drivers and other personnel in the logistics sector. Introducing new technologies may increase the economic gap between the rich and the poor, thus exacerbating existing social inequalities and socioeconomic problems [109]. Economic barriers are grouped as [105]:
- High initial costs (Ec1);
- Economy and employment (Ec2);
- Disruption of the transport industry (Ec3);
- Uneven distribution of income (Ec4).
Technical issues (Te): Several crucial technical performance challenges affect the successful deployment of drones [105]:
- Short flight range (Te1);
- Navigation (Te2);
- Adverse weather conditions (Te3);
- Obstacle and collision avoidance (Te4);
- Drone tracking (Te5);
- Limited transport capacity (Te6).
Drones are limited by autonomy and battery life, making more extensive flights or operations in remote locations challenging [123]. Furthermore, drones may encounter technical barriers, such as adverse weather conditions that interfere with safe flight and can damage the drone or other material [109]. Delivery risk is also a vital factor affecting public acceptance of drones as a means of delivery and implying the probability that the drone might not be operable and/or be unable to deliver the product [104]. When applying appropriate safety measures and training, the risk of technical problems with drones in adverse weather conditions may be reduced to an acceptable level, which might provide the further usage of drones in various fields, including logistics. In addition, drones have several other technological disadvantages: avoiding obstacles such as buildings, structures, other drones, aircraft, and birds [124], as well as transport capacity [125].
The problem addressed in this paper consists of two sub-problems. The first aims to evaluate the described barriers concerning the demands of various groups and rank them to identify the barriers that significantly hinder the broader implementation of drones in LML. The second sub-problem aims to evaluate and rank strategies for overcoming these barriers. In this sub-problem, barriers become criteria for assessing strategies, serving as alternatives to the MCDM problem. Results obtained from evaluating barriers are utilized in the second sub-problem as criterion weights. Strategies are categorized into seven groups. It is important to note that these groups are not strictly defined, and strategies may overlap or be applied in combination.
Education and raising awareness about drone technology (S1): This strategy involves conducting educational campaigns to increase public awareness and understanding of drone technology, its safe use, and its benefits to all stakeholders. Additionally, this strategy can benefit drone manufacturers by providing recommendations for improving technology and addressing technical barriers that may hinder the greater acceptance of drone applications. Moreover, education necessitates the existence of specific regulations while also highlighting the need for regulation.
The strategy aims to overcome implementation barriers to ensure the safe and efficient use of drones in the LM and encompasses several components:
- Public presentations, workshops, panel discussions;
- Social media campaigns;
- Establishment of clear and accessible policies;
- Addressing public concerns;
- Identification and resolution of technical barriers;
- Partnerships and collaboration;
- Monitoring and evaluation.
Establishment of Legal Framework and Regulations for Drone Use (S2): Establishing a legal and regulatory framework ensures the safety and protection of public interests by defining regulations for drone usage, data collection, and utilization, as well as penalties for unauthorized use. The regulatory framework should focus on privacy protection and societal security, including:
- Development of clear regulations and laws governing drone usage;
- Transparency and trust;
- Cost reduction;
- Environmental protection;
- Prevention of misuse;
- Collaboration with relevant institutions;
- Training and certification;
- International cooperation.
Technological Development and Innovation (S3): This strategy aims to invest in research and development to advance technology by improving performance aspects such as flight time, autonomous functionalities, obstacle avoidance sensors, navigation, battery efficiency, application of artificial intelligence, and software system performance. Continuous investment in research and development further aids in overcoming technical limitations and enhancing the safety, reliability, and efficiency of drone delivery. This strategy encompasses:
- Research and development of drone technologies;
- Enhancement of software systems;
- Flight testing centers;
- Technology transfer;
- Security and safety performance;
- Evaluation and improvement.
Partnerships and Collaboration with Relevant Stakeholders (S4): This strategy aims to overcome barriers to implementing drones for LML by establishing collaboration among relevant stakeholders. Building partnerships with stakeholders, including customers, suppliers, government agencies, and local authorities, can help overcome operational challenges and ensure the success of drone delivery initiatives. Collaborations with stakeholders contribute to synergy and joint action among parties by enabling the exchange of information, setting standards, problem solving, and promoting shared cooperation. Suppliers can aid in finding quality and reliable drones and understanding market trends, while government agencies can assist in navigating complex regulations. Conversely, partnerships with customers can help gather feedback, contributing to enhanced quality and customer satisfaction. Establishing partnerships with government agencies is also beneficial for sourcing project funding, especially for significant financial investments. This open, interdisciplinary collaboration is crucial for launching an ecosystem based on the safest and most secure operational levels. It involves:
- Partnerships and collaboration with regulatory bodies and government agencies;
- Partnerships with local entities;
- Collaboration with technology suppliers;
- Partnerships with customers.
Monitoring and Regulating Safety (S5): The strategy for monitoring and regulating drone safety, aiming to ensure the safe and responsible use of drones in LML, consists of:
- Technical development;
- Collaboration among participants;
- Regulatory measures;
- Unauthorized drone identification technology;
- Response procedures.
Investment in Drone Delivery Infrastructure (S6): Lays the foundation for secure, reliable, and efficient execution of LML. Through charging and landing stations, communication networks, and data management systems, this strategy addresses logistics and operational challenges and provides the integrated infrastructure necessary for successful drone delivery. It involves:
- Charging and landing stations,
- Communication networks,
- Data management systems.
Efficiency and Cost Optimization (S7): One of the goals of implementing drones in LML is to achieve an efficient and economical process. This strategy is considered separately but can be applied across the previously mentioned strategies to attain efficiency and reduce operational costs. This group includes elements focused on resource management efficiency, reduced delivery times, and cost optimization, encompassing:
- Efficient route planning;
- Enhanced drone autonomy;
- Drone fleet management;
- Operational scalability;
- Delivery consolidation;
- Integration with other transportation modes;
- Inventory tracking and management.
4. Methodology
To tackle the MCDM challenge in this study, a novel hybrid model that combines the Fuzzy D-FARE method for obtaining criterion weights and the Fuzzy COBRA method for ranking alternatives is developed. Aflow chart of the proposed methodology is presented in Figure 1, and procedural steps for implementing this model are described afterward.
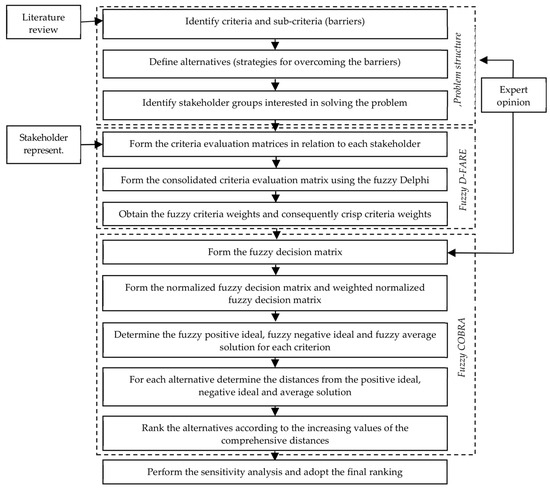
Figure 1.
Concept of the proposed MCDM model (adapted from [93,126]).
Step 1: The initial step involves defining the structural aspects of the problem, i.e., formulating the sets of alternatives and assessment criteria, along with the identification of stakeholders with an interest in problem resolution.
Step 2: Following problem structuring, the subsequent step entails delineating the fuzzy scale for criteria and alternative evaluations by decisionmakers. Linguistic assessments, with corresponding triangular fuzzy values, are presented in Table 1 to facilitate this process.

Table 1.
Fuzzy evaluation scale [87].
Step 3: The next step involves acquiring criterion weights through the application of the Fuzzy D-FARE method. This involves the following sub-steps:
Step 3.1: Criteria evaluation matrices () are formulated based on linguistic evaluations by decisionmakers representing various stakeholders. These matrices are then transformed into triangular fuzzy values using predefined relations from Table 1.
where denotes the triangular fuzzy evaluation of the impact strength (importance) of criterion in relation to criterion by decisionmaker . The variables and represent the number of criteria and decisionmakers involved in the assessments, respectively.
Step 3.2: The consolidated criteria evaluation matrix is created in the following sub-step using the Fuzzy Delphi method [87].
Step 3.3: Fuzzy criteria weights () are obtained using the following equation:
in which:
Step 3.4: The final crisp criteria weights () are then derived using the equations:
where
Step 4: Ranking the alternatives involves employing the Fuzzy COBRA method, an extension of the conventional COBRA method.
Step 4.1: The procedure begins by forming the fuzzy decision matrix where represents evaluations of alternatives () in relation to criteria ().
Step 4.2: Normalize the fuzzy decision matrix to create .
where
Step 4.3: Next, form the weighted normalized fuzzy decision matrix
Step 4.4: Establish fuzzy positive ideal (), fuzzy negative ideal (), and fuzzy average solution () for each criterion function, considering sets of benefit () and cost () criteria.
Step 4.5: For each alternative, determine the distances from all solutions as
where stands for solutions , or , and is the correction coefficient:
and and stand for the Euclidian and Taxicab distances
Step 4.6: Rank the alternatives by ordering the comprehensive distances () in increasing order.
Step 5: Perform a sensitivity analysis by excluding the most significant criteria from the calculations (assigning them the weight of 0). The number of criteria that should be excluded depends on the total number of criteria but should not be less than 15% of the total number of criteria.
5. Evaluation and Ranking of Barriers for the Implementation of Drones and Strategies for Overcoming Them
A hybrid MCDM model integrating Fuzzy D-FARE for the evaluation and ranking of the barriers to drone implementation and the Fuzzy COBRA model for assessing alternatives to address them is applied in this section. Together with the identification of the relevant stakeholders, this is the first step (Step 1) of the model application.
In the first phase of applying the model, the Fuzzy D-FARE method is used to obtain the importance barriers, which will be used as the criteria in the second part of the model. The barriers (criteria) are assessed from the perspective of four distinct stakeholder groups: logistics service providers, logistics service users, the city and regulatory bodies, and the public (residents). From the standpoint of logistics service providers, the most critical criteria are Rl3, Rl1, Rl7, Te1, and Te7, which pertain to insurance obligations, drone owners’ liability, aviation regulation gaps, limited flight range, and constrained transport capacities. Drone owners require appropriate insurance to cover potential damages, which causes additional financial burden and increased responsibility. Moreover, they must be accountable for drone operations concerning the safety of people and property, necessitating an understanding of laws and regulations related to drone use and implementation of proper training and certification for drone operators. In many countries, regulations about drones are still in development, and their absence can hinder their implementation. Additionally, battery lifespan is challenging as goods cannot be delivered to longer distances. Restrictions on payload and cargo space that drones can carry also impact the quantity and type of goods that can be shipped in a single flight.
On the other hand, for service users and the general public, the most crucial criteria relate to regulations, guidelines, and technical barriers, namely criteria Rl1–Rl7 and Te1–Te6. Residents are additionally concerned about privacy and security Ps1–Ps8. The use of drones in LML can encounter limitations due to legal regulations regarding drone flights, including flight altitude, distance from inhabited areas, and permits for commercial use. Technical barriers encompass drone autonomy, payload capacity, and navigation precision in varying weather conditions. Additionally, residents are concerned about privacy due to the potential for recording or surveillance through drone cameras during delivery. Moreover, safety aspects such as risks of drone crashes or the potential for flight disruption are also significant concerns for residents in flight areas.
City authorities and regulatory bodies approach all barriers to drone delivery in the LML similarly. Regarding the regulations and policies, city authorities and regulatory bodies face the challenge of aligning local laws with national and international regulations concerning the use of drones for commercial delivery. Technical barriers encompass drone autonomy, flight safety under diverse conditions, and navigational accuracy. Furthermore, privacy and security concerns are crucial. It is imperative for city authorities and regulatory bodies to ensure that drone delivery does not compromise citizens’ privacy and to implement adequate measures to safeguard data during the delivery process. Additionally, drone delivery must pose no risk to people’s safety and property. Environmental and economic barriers might also be pertinent, including the impact of drone delivery on the environment and the costs associated with implementing and maintaining delivery drones. All these barriers contribute to a higher perceived risk that city authorities and regulatory bodies must carefully consider and manage successful drone delivery in the LML.
By evaluating and ranking the barriers to drone implementation through the Fuzzy D-FARE method and considering assessments from all stakeholders, the most significant barriers to the successful adoption of these technologies have been identified.
5.1. Results
Evaluation of the barriers (presented in Table S1) was performed by an international pool of stakeholder representatives of various backgrounds and experiences, using the linguistic terms provided in Table 1 (Step 2). A total of 43 stakeholder representatives from seven countries were interviewed. During the creation of the pool, it was taken care that all stakeholders are approximately equally represented and that those representing logistics service providers, users, and city and regulatory bodies have enough expertise and knowledge in the subject area (at least five years of experience). The structure of stakeholder representatives is given in Table 2.
Table 2.
Structure of the pool of stakeholders’ representatives.
During the interviews, the representatives were asked to evaluate the importance of the barriers using the linguistic scale from Table 1. The responses from the representatives of the same stakeholder group were statistically processed to form a representative response for the corresponding stakeholder. Within each stakeholder group, the responses with the highest frequency, and thus the highest probability, were selected as the representative ones. In this way, the assessment of barriers’ importance from the perspective of each stakeholder group is obtained and presented in Table S1.
In the following step (Step 3), the Fuzzy D-FARE method is applied to obtain the barriers’ weights. Using the relationships from Table 1, linguistic terms are transformed to form the criteria evaluation matrix (1) (Step 3.1). Through Equations (2)–(6), a unified criteria evaluation matrix is established (Step 3.2). The fuzzy weights of the criteria are determined by employing Equations (7)–(10) (Step 3.3). The final crisp weights are obtained by applying the Equations (11) and (12) (Step 3.4). These weights are presented in Table 3.
Table 3.
Results of evaluation of barriers using the Fuzzy D-FARE method.
The lack of aviation regulations (Rl7) represents the most significant barrier to the safe and efficient use of drones for delivery, as the existing regulations regarding drone usage are not precise or adequate.
The risk of unauthorized access, misuse of collected data, potential breaches of privacy, and data security during drone use implies the great importance ofbarriersPs1 and Ps3. They are followed by the requirements for insurance (Rl3) and owner responsibility (Rl1).
Identified barriers indicate the need for more precise legal regulations, improved data protection systems, and clear guidelines on responsibility to address challenges and enable the safe and efficient use of drones in the LML field. Therefore, strategies are proposed in this paper to address these challenges.
In the next step (Step 4), the Fuzzy COBRA method is applied to achieve the final result and rank the seven alternative strategies (S1–S7). Strategies can be effectively combined and overlapped to create a comprehensive approach for integrating drones into LML. Strategies for establishing a legal framework for drones (S2) and partnerships with relevant stakeholders (S4) are vital in preventing theft (Pp7). By guiding drone identification, registration, and tracking, this strategy establishes clear ownership for owners and operators, preventing potential theft. Partnerships and collaboration with relevant stakeholders also address this barrier through information sharing and establishing enhanced security protocols in cooperation with local authorities, police, and delivery companies. Additionally, investing in drone delivery infrastructure (S6) enables the construction of secure zones for drone takeoff and landing, the development of systems to track and monitor their routes, and the implementation of advanced identification systems, creating an environment that complicates unauthorized access to drones and protects them from potential theft. Monitoring and regulating drone safety (S5) within the legal framework (S2) set standards and requirements related to drone owner responsibility (Rl1) and insurance types (Rl3), ensuring their safe and responsible use and establishing liability insurance, covering potential damages or incidents that a drone may cause during flight or delivery. Strategy (S1), through education and raising awareness about drone technology, can help users and communities better understand the real risks associated with drone use and reduce exaggerated risk perceptions (Pp1). Moreover, it can contribute to transparency (Pp3) by providing clear information on how drones are used, security protocols, and the treatment of collected drone data. Technological development and innovation (S3) through the implementation of better drone identification and tracking systems have a significant impact on reducing theft risks (Pp7) and on drone owner responsibility (Rl1) and insurance requirements (Rl3). Innovations in data encryption and security measures can prevent unauthorized access to data transmitted or stored in drones.
The evaluations of strategies for overcoming barriers were carried out by international experts (scholars from the fields of logistics, airborne transportation, regulations in the field of transportation and economy) with individual experiences of over ten years. A focus group of seven experts reached a consensus on the strategies regarding the barriers, which they expressed as the linguistic evaluations provided in Table 1. These evaluations are presented in Table S2. The Fuzzy COBRA method is then applied to rank the strategies. The evaluation matrix is formed according to Equation (13) (Step 4.1) and then normalized usingEquations (14) and (15) (Step 4.2) and weighted usingEquation (16) (Step 4.3). According to the obtained evaluations, fuzzy positive, negative, and average solutions are defined using Equations (17)–(19) (Step 4.4). By applyingEquations (20)–(24), the distances of each alternative from these solutions are calculated (Step 4.5). The final ranking was obtained by calculating the comprehensive distances for each alternative usingEquation (25) (Step 4.6). The obtained results, i.e., the ranking of strategies for overcoming the barriers of drone implementation in LML, are presented in Table 4.
Table 4.
Results of applying the Fuzzy COBRA method.
Results show that the optimal strategy for overcoming barriers in drone usage is S2, establishing a legal framework and regulations for drone use, while the least adequate strategy is S7, efficiency and cost optimization.
5.2. Sensitivity Analysis
Six scenarios (Sc1–Sc6) were formed to analyze the sensitivity of the solutions obtained in this study. In each scenario, one of the six most significant criteria (barriers) was excluded, assigning a weight of 0 to the criteria Pp7, Rl1, Rl3, Pp3, Pp1, and Rl2, respectively (Step 5). The rankings were compared with the results obtained in the base scenario (Sc0) (Table 5).
Table 5.
Results of the sensitivity analysis.
It can be seen from the table that alternative S2 is consistently ranked the highest, while alternative S3 is interchangeable, being ranked second and/or third in all six scenarios. Upon conducting a comparative analysis of the rankings depicted in Figure 2, it is evident that there are no noteworthy ranking alterations. Consequently, one can deduce that the ranking derived in the baseline scenario exhibits satisfactory stability.
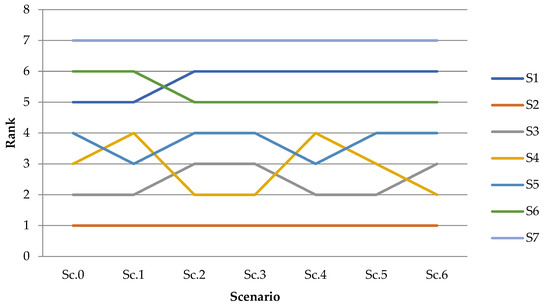
Figure 2.
Results of the sensitivity analysis.
6. Discussion
The results of this study demonstrate that Strategy S2 is crucial in overcoming barriers to using drones in the LML. It involves establishing a legal and regulatory framework to ensure safety, safeguard public interests, and protect the environment by defining precise regulations for drone use, such as safety standards, flight restrictions, owner liability insurance, operator certification, imposition of fees, and penalties for unauthorized use. Transparency in regulations is crucial for building public trust and reducing risks. Accessible regulations enable everyone, including drone operators, users, and citizens, to comprehend the rules and responsibilities.
Furthermore, legal regulatory support can alleviate financial barriers through subsidies or tax incentives, potentially increasing drone acceptance and usage. This strategy also emphasizes environmental protection through implementing standards that mitigate drones’ negative environmental impact. Additionally, it provides mechanisms for monitoring and regulating drone use to prevent misuse. Establishing collaborations with relevant institutions, government agencies, and regulatory bodies is paramount to developing appropriate regulations aligned with rapid technological changes and new challenges.
Support for training and certifying drone operators contributes to raising awareness about safe usage and high standards. According to the results, another strategy, S3, focusing on technological development and innovation, would significantly impact overcoming barriers in drone delivery in the LML. Investing in research and development would enhance drone technology performance, such as autonomous functionalities, flight duration, obstacle avoidance sensors, navigation, and battery efficiency. This strategy involves the ongoing enhancement of software systems, the establishment of flight testing centers, technology transfer between research and industry, improvement of safety performance, and continual evaluation to adapt and advance drone technology. These endeavors collectively mark significant progress toward achieving elevated safety standards, environmental protection, and the efficient implementation of drones in the LML.
The two best-ranked strategies are dominant for overcoming the identified barriers. This is confirmed through the sensitivity analysis. The sensitivity analysis also demonstrated satisfactory stability of the obtained ranking since there are no significant changes in the ranking through the scenarios. It also indicated that liability for drone owners, insurance obligations, and drone routes, even though they are not the most significant barriers, have a high impact on the ability of the strategies to overcome barriers. This also implies that the strategies’ ability to address the regulative and legislative barriers greatly defines their effectiveness and efficiency.
The barriers hindering the widespread application of drones in LML, along with the strategies to overcome these challenges, are universal and transcend geographical boundaries. Some regions or cities have already taken steps to remove the barriers. In these, but also in all other areas where no steps have been taken so far, this study can serve as a good guide towards the higher application of drones in LML. Identifying and ranking barriers to drone use in LML is one of the most important contributions of this paper. It goes further to establish and rank strategies for overcoming these barriers. This offers practical insights for industry stakeholders, policymakers, and technology developers. The implications include informed decision making, targeted resource allocation, and guidance for policies and innovations to improve the successful integration of drone technology in last-mile logistics, ultimately enhancing efficiency in delivery systems.
In recent years, the development of MCDM models has increased, particularly those combining multiple methods for more effective leverage of their strengths or the mitigation of shortcomings, depending on the specific problem. The fusion of two methods occurs when one method falls short of providing criterion weights or demands extensive resources for final results, a scenario common in larger-scale problems requiring comparisons of numerous element pairs. A third method is typically introduced in issues involving multiple stakeholders, transforming it into a group MCDM challenge. This third method aids in aggregating and harmonizing diverse viewpoints and assessments from multiple decisionmakers, stakeholders, and interest groups [87].
Given the multifaceted nature of the issue under consideration in this study, which involves various stakeholders, adopting a hybrid model based on three methods was deemed appropriate. The proposed MCDM model combines the Fuzzy D-FARE and Fuzzy COBRA methods, a novel integration not documented in the existing literature.
The Delphi method streamlines the aggregation of criterion assessments from different stakeholder groups, serving as the initial step towards finding a compromise solution. FARE was selected for its user-friendly interface, prompt results, and high reliability, making it especially valuable for addressing large-scale issues without exhaustive comparisons and evaluations. Its integration into a fuzzy environment allows for a more realistic consideration of opinions during decision making.
The COBRA method was incorporated due to its rapid acceptance in solving diverse problems. Its notable advantage lies in its comprehensive approach to ranking alternatives based on distances to three solutions: positive ideal, negative ideal, and average solution. This sets it apart from other distance-based methods that typically rely on two solutions at most. COBRA employs Euclidean and Taxicab distance measurements for enhanced reliability in solution derivation.
However, the complexity inherent in COBRA, necessitating the calculation of four distance groups from three types of solutions, does pose a challenge. Despite its demand for additional resources, particularly time, the combination of these methods forms an efficient, effective, and beneficial model capable of delivering high-quality and reliable results. This model extends its applicability to the specific problem addressed in this study and similar decision-making scenarios in intermodal transport, logistics, and various other domains.
The novel MCDM model is another significant contribution of this paper. The Fuzzy COBRA method enhanced decision making by offering a more comprehensive approach, leading to more informed and effective decisions. Since this comprehensiveness is resource demanding, the Fuzzy D-FARE method allowed better resource allocation and strategy formulation, thus optimizing the utilization of available resources. The results would probably be similar by combining other MCDM methods, e.g., AHP or ANP with COBRA or FARE with TOPSIS or VIKOR. However, the application of these models would require more resources, or it would produce less reliable results. The combination proposed in this study is intended to achieve the tradeoff between reliability and comprehensiveness on one side and resources on the other. The hybrid MCDM models provide valuable tools for decisionmakers facing complex scenarios. Overall, the advancement of MCDM models contributes to the evolution of decision science, fostering innovation and efficiency in problem solving methodologies.
7. Conclusions
The popularity of drones is increasing among the general public and within scientific circles, while uncertainty about their future use is also growing. This research employs a combination of the Fuzzy D-FARE and Fuzzy COBRA methods to prioritize barriers for drone application in LML and subsequently propose and rank strategies and initiatives to address them. This study analyses the barriers to drone implementation in LML and assesses and evaluates various perspectives and interests of different stakeholders.
The most significant barriers to successful technology application have been identified by evaluating and ranking barriers to drone implementation. The lack of aviation regulations poses the most significant barrier to the safe and efficient use of drones for delivery, as existing regulations and drone usage rules are not sufficiently precise or adequate. The risk of unauthorized access, misuse of collected data, potential privacy breaches, and data security during drone usage are other significant barriers that should be highlighted. Requirements for insurance and owner liability are either poorly defined or burdensome, representing additional barriers to the widespread adoption of these technologies.
Identified barriers highlight the need for more precise legal regulations, improvement in data protection systems, and clear guidelines on liability to eliminate key challenges and enable safe and efficient drone application in the LML sector. Without regulations and legislation governed by city and regulatory bodies, the potential for widespread drone use in LML is limited.
Compared to previous research in this field, a new approach evaluates proposed strategies to eliminate barriers to drone implementation in LML. The results indicate that establishing a legal and regulatory framework is crucial for safety, safeguarding public interests, and environmental protection by defining precise regulations for using drones. The study has limitations, including potential oversight of some barriers, a possibly incomplete set of strategies for overcoming identified barriers, a methodological complexity that may challenge inexperienced decisionmakers, and a limited representation of stakeholders’ perspectives, suggesting a need for broader inclusion for a more comprehensive understanding. Accordingly, in future research, the same analysis can be conducted with additional barriers identified with the development and commercialization of drone technology. Further research can broaden the analysis perspective, enhance barrier-overcoming strategies, and contribute to the development of more sustainable approaches to drone usage, positively impacting broader social and ecological spheres.
The defined model could be further improved and refined, for example, by incorporating new distance similarity measures [127] in the fuzzy COBRA part of the model. Moreover, defining new models for assessing barriers and strategies could contribute to understanding the complexity of this issue. The models used in this research can be adapted and applied to address similar problems in this or other domains, offering the potential for universal application of analytical tools and methods.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/math12030367/s1, Table S1: Stakeholders’ evaluations of barriers (criteria); Table S2: Evaluations of strategies for overcoming barriers.
Author Contributions
Conceptualization, S.T. and M.K.; methodology, S.T. and M.K.; validation, S.T., M.K. and L.R.; formal analysis, S.T. and M.K.; investigation, S.T., M.K. and L.R.; data curation, S.T. and M.K.; writing—original draft preparation, S.T., M.K. and L.R.; writing—review and editing, S.T. and M.K.; visualization, M.K. and L.R.; supervision, S.T. and M.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
All data used in the study are presented within the paper or provided in the Supplementary Materials.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tadić, S.; Zečević, S. Modeliranje Koncepcija City Logistike, 1st ed.; Faculty of Transport and Traffic Engineering, University of Belgrade: Belgrade, Serbia, 2016; pp. 31–34. [Google Scholar]
- Tadić, S.; Krstić, M.; Kovač, M.; Brnjac, N. Smart solutions for the problems of city logistics. In Proceedings of the 19th European Transport Congress: European Green Deal Challenges and Solutions for Mobility and Logistics in Cities, Maribor, Slovenia, 7 October 2021. [Google Scholar]
- Tadić, S.; Zečević, S.; Petrović-Vujačić, J. Globalni trendovi i razvoj logistike. Ekon. Vidici 2013, 18, 519–532. (In Serbian) [Google Scholar]
- Olsson, J.; Hellström, D.; Pålsson, H. Framework of Last Mile Logistics Research: A Systematic Review of the Literature. Sustainability 2019, 11, 7131. [Google Scholar] [CrossRef]
- Gevaers, R.; Van de Voorde, E.; Vanelslander, T. Characteristics of innovations in last mile logistics-using best practices, case studies and making the link with green and sustainable logistics. Assoc. Eur. Transp. Contrib. 2009, 1, 21. [Google Scholar]
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The Use of Drones for Last-Mile Delivery: A Numerical Case Study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- Cárdenas, I.; Beckers, J.; Vanelslander, T. E-commerce last-mile in Belgium: Developing an external cost delivery index. Res. Transp. Bus. Manag. 2017, 24, 123–129. [Google Scholar] [CrossRef]
- Buldeo Rai, H.; Verlinde, S.; Macharis, C. The “next day, free delivery” myth unravelled: Possibilities for sustainable last mile transport in an omnichannel environment. Int. J. Retail Distrib. Manag. 2019, 47, 39–54. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, J.; Yang, S.; Wei, J. Consumer’s intention to use self-service parcel delivery service in online retailing: An empirical study. Internet Res. 2018, 28, 500–519. [Google Scholar] [CrossRef]
- Ranieri, L.; Digiesi, S.; Silvestri, B.; Roccotelli, M. A review of last mile logistics innovations in an externalities cost reduction vision. Sustainability 2018, 10, 782. [Google Scholar] [CrossRef]
- Lim, S.F.W.T.; Jin, X.; Srai, J.S. Consumer-driven e-commerce: A literature review, design framework, and research agenda on last-mile logistics models. Int. J. Phys. Distrib. Logist. Manag. 2018, 48, 308–332. [Google Scholar] [CrossRef]
- Tadić, S.; Zečević, S. Global trends and their impact on city logistics management. Tehnika 2016, 71, 459–464. [Google Scholar] [CrossRef]
- Harrington, T.S.; Singh Srai, J.; Kumar, M.; Wohlrab, J. Identifying design criteria for urban system ‘last-mile’ solutions—A multi-stakeholder perspective. Prod. Plan. Control 2016, 27, 456–476. [Google Scholar] [CrossRef]
- Gevaers, R.; Van de Voorde, E.; Vanelslander, T. Cost Modelling and Simulation of Last-mile Characteristics in an Innovative B2C Supply Chain Environment with Implications on Urban Areas and Cities. Procedia Soc. Behav. Sci. 2014, 125, 398–411. [Google Scholar] [CrossRef]
- Boyer, K.K.; Prud’homme, A.M.; Chung, W. The Last Mile Challenge: Evaluating the Effects of Customer Density and Delivery Window Patterns. J. Bus. Logist. 2009, 30, 185–201. [Google Scholar] [CrossRef]
- Muñuzuri, J.; Cortés, P.; Grosso, R.; Guadix, J. Selecting the location of minihubs for freight delivery in congested downtown areas. J. Comput. Sci. 2012, 3, 228–237. [Google Scholar] [CrossRef]
- Leung, K.H.; Choy, K.L.; Siu, P.K.Y.; Ho, G.T.S.; Lam, H.Y.; Lee, C.K.M. A B2C e-commerce intelligent system for re-engineering the e-order fulfilment process. Expert Syst. Appl. 2018, 91, 386–401. [Google Scholar] [CrossRef]
- Xing, Y.; Grant, D.B.; McKinnon, A.C.; Fernie, J. The interface between retailers and logistics service providersin the online market. Eur. J. Mark. 2011, 45, 334–357. [Google Scholar] [CrossRef]
- van Loon, P.; Deketele, L.; Dewaele, J.; McKinnon, A.; Rutherford, C. A comparative analysis of carbon emissions from online retailing of fast moving consumer goods. J. Clean. Prod. 2015, 106, 478–486. [Google Scholar] [CrossRef]
- Edwards, J.B.; McKinnon, A.C.; Cullinane, S.L. Comparative analysis of the carbon footprints of conventional and online retailing: A “last mile” perspective. Int. J. Phys. Distrib. Logist. Manag. 2010, 40, 103–123. [Google Scholar] [CrossRef]
- Aljohani, K.; Thompson, R.G. A Stakeholder-Based Evaluation of the Most Suitable and Sustainable Delivery Fleet for Freight Consolidation Policies in the Inner-City Area. Sustainability 2018, 11, 124. [Google Scholar] [CrossRef]
- Allen, J.; Bekta¸s, T.; Cherrett, T.; Friday, A.; McLeod, F.; Piecyk, M.; Piotrowska, M.; Austwick, M.Z. Enabling a Freight Traffic Controller for Collaborative Multidrop Urban Logistics: Practical and Theoretical Challenges. Trans. Res. Rec. 2017, 2609, 77–84. [Google Scholar] [CrossRef]
- Verma, A. Electric vehicle routing problem with time windows, recharging stations and battery swapping stations. EURO J. Transp. Logist. 2018, 7, 415–451. [Google Scholar] [CrossRef]
- Breunig, U.; Baldacci, R.; Hartl, R.F.; Vidal, T. The electric two-echelon vehicle routing problem. Comput. Oper. Res. 2019, 103, 198–210. [Google Scholar] [CrossRef]
- Schneider, M.; Stenger, A.; Goeke, D. The Electric Vehicle-Routing Problem with Time Windows and Recharging Stations. Transp. Sci. 2014, 48, 500–520. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Reyes, D.; Savelsbergh, M.; Toriello, A. Vehicle routing with roaming delivery locations. Transp. Res. Part C Emerg. Technol. 2017, 80, 71–91. [Google Scholar] [CrossRef]
- Lebeau, P.; Macharis, C.; van Mierlo, J.; Maes, G. Implementing electric vehicles in urban distribution: A discrete event simulation. World Electr. Veh. J. 2013, 6, 38–47. [Google Scholar] [CrossRef]
- Morganti, E.; Browne, M. Technical and operational obstacles to the adoption of electric vans in France and the UK: An operator perspective. Transp. Policy 2018, 63, 90–97. [Google Scholar] [CrossRef]
- Conway, A.; Cheng, J.; Kamga, C.; Wan, D. Cargo cycles for local delivery in New York City: Performance and impacts. Res. Transp. Bus. Manag. 2017, 24, 90–100. [Google Scholar] [CrossRef]
- Saenz, J.; Figliozzi, M.; Faulin, J. Assessment of the Carbon Footprint Reductions of Tricycle Logistics Services. Transp. Res. Rec. 2016, 2570, 48–56. [Google Scholar] [CrossRef]
- Kornatowski, P.M.; Bhaskaran, A.; Heitz, G.M.; Mintchev, S.; Floreano, D. Last-Centimeter Personal Drone Delivery: Field Deployment and User Interaction. IEEE Robot. Autom. Lett. 2018, 3, 3813–3820. [Google Scholar] [CrossRef]
- Vakulenko, Y.; Hellström, D.; Hjort, K. What’s in the parcel locker? Exploring customer value in e-commerce last mile delivery. J. Bus. Res. 2018, 88, 421–427. [Google Scholar] [CrossRef]
- Lebeau, P.; De Cauwer, C.; Van Mierlo, J.; Macharis, C.; Verbeke, W.; Coosemans, T. Conventional, Hybrid, or Electric Vehicles: Which Technology for an Urban Distribution Centre? Sci. World J. 2015, 2015, 302867. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Wang, Q.; Susilo, Y.O. Assessing the impacts of collection-delivery points to individual’s activity-travel patterns: A greener last mile alternative? Transp. Res. Part E Logist. Transp. Rev. 2019, 121, 84–99. [Google Scholar] [CrossRef]
- Song, L.; Guan, W.; Cherrett, T.; Li, B. Quantifying the Greenhouse Gas Emissions of Local Collection-and-Delivery Points for Last-Mile Deliveries. Transp. Res. Rec. 2013, 2340, 66–73. [Google Scholar] [CrossRef]
- Xu, M.; Ferrand, B.; Roberts, M. The last mile of e-commerce—Unattended delivery from the consumers and eTailers’ perspectives. Int. J. Electron. Mark. Retail. 2008, 2, 20–38. [Google Scholar] [CrossRef]
- Wang, X.; Zhan, L.; Ruan, J.; Zhang, J. How to choose “last mile” delivery modes for E-fulfillment. Math. Probl. Eng. 2014, 2014, 417129. [Google Scholar] [CrossRef]
- Punakivi, M.; Yrjölä, H.; Holmström, J. Solving the last mile issue: Reception box or delivery box? Int. J. Phys. Distrib. Logist. Manag. 2001, 31, 427–439. [Google Scholar] [CrossRef]
- Cardenas, I.D.; Dewulf, W.; Vanelslander, T.; Smet, C.; Beckers, J. The e-commerce parcel delivery market and the implications of home B2C deliveries vs. pick-up points. Int. J. Transp. Econ. 2017, 44, 235–256. [Google Scholar]
- Lachapelle, U.; Burke, M.; Brotherton, A.; Leung, A. Parcel locker systems in a car dominant city: Location, characterisation and potential impacts on city planning and consumer travel access. J. Transp. Geogr. 2018, 71, 1–14. [Google Scholar] [CrossRef]
- Yuen, K.F.; Wang, X.; Ng, L.T.W.; Wong, Y.D. An investigation of customers’ intention to use self-collection services for last-mile delivery. Transp. Policy 2018, 66, 1–8. [Google Scholar] [CrossRef]
- de Oliveira, L.K.; Morganti, E.; Dablanc, L.; de Oliveira, R.L.M. Analysis of the potential demand of automated delivery stations for e-commerce deliveries in Belo Horizonte, Brazil. Res. Transp. Econ. 2017, 65, 34–43. [Google Scholar] [CrossRef]
- Hayel, Y.; Quadri, D.; Jiménez, T.; Brotcorne, L. Decentralized optimization of last-mile delivery services with non-cooperative bounded rational customers. Ann. Oper. Res. 2016, 239, 451–469. [Google Scholar] [CrossRef]
- Paddeu, D.; Parkhurst, G.; Fancello, G.; Fadda, P.; Ricci, M. Multi-stakeholder collaboration in urban freightconsolidation schemes: Drivers and barriers to implementation. Transport 2018, 33, 913–929. [Google Scholar] [CrossRef]
- Lindawati; Van Schagen, J.; Goh, M.; de Souza, R. Collaboration in urban logistics: Motivations and barriers. Int. J. Urban Sci. 2014, 18, 278–290. [Google Scholar] [CrossRef]
- Park, H.; Park, D.; Jeong, I.-J. An e ects analysis of logistics collaboration in last-mile networks for CEP delivery services. Transp. Policy 2016, 50, 115–125. [Google Scholar] [CrossRef]
- Cleophas, C.; Cottrill, C.; Ehmke, J.F.; Tierney, K. Collaborative urban transportation: Recent advances in theory and practice. Eur. J. Oper. Res. 2019, 273, 801–816. [Google Scholar] [CrossRef]
- Gonzalez-Feliu, J.; Pronello, C.; Salanova Grau, J.M. Multi-stakeholder collaboration in urban transport: State-of-the-art and research opportunities. Transport 2018, 33, 1079–1094. [Google Scholar] [CrossRef]
- Halldórsson, Á.; Kotzab, H.; Skjøtt-Larsen, T. Supply chain management on the crossroad to sustainability: A blessing or a curse? Logist. Res. 2009, 1, 83–94. [Google Scholar] [CrossRef]
- McKinsey. Parcel Delivery: The Future of Last Mile. 2016. Available online: https://bdkep.de/files/bdkep-dateien/pdf/2016_the_future_of_last_mile.pdf (accessed on 7 October 2023).
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Osakwe, C.N.; Hudik, M.; Ríha, D.; Stros, M.; Ramayah, T. Critical factors characterizing consumers’ intentions to use drones for last-mile delivery: Does delivery risk matter. J. Retail. Consum. Serv. 2021, 65, 102865. [Google Scholar] [CrossRef]
- Bamburry, D. Drones: Designed for Product Delivery. Des. Manag. Rev. 2015, 26, 40–48. [Google Scholar] [CrossRef]
- Chen, C.; Demir, F.; Huang, Y.; Qiu, R. The adoption of self-driving delivery robots in last mile logistic. Transp. Res. Part E Logist. Transp. Rev. 2021, 146, 102214. [Google Scholar] [CrossRef]
- Khan, R.; Tausif, S.; Javed Malik, A. Consumer Acceptance of Delivery Drones in Urban Areas. Int. J. Consum. Stud. 2019, 43, 87–101. [Google Scholar] [CrossRef]
- Rathlev, F.; Meyer, B.; Juerss, S. Innovative Technologies for Aerial Survey of gas Pipes. Gas Energy 2012, 5, 1–5. [Google Scholar]
- Kim, S.J.; Lim, G.J.; Cho, J.; Ĉot’e, M.J. Drone-aided Healthcare Services for Patients with Chronic Diseases in Rural Areas. J. Intell. Robot. Syst. 2017, 88, 163–180. [Google Scholar] [CrossRef]
- Malveaux, C.; Hall, S.G.; Price, R.R. Using Drones in Agriculture: Unmanned Aerial Systems for Agricultural Remote Sensing Applications; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2016. [Google Scholar]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1. [Google Scholar] [CrossRef]
- Vattapparamban, E.; Güvenç, İ.; Yurekli, A.İ.; Akkaya, K.; Uluağaç, S. Drones for SMART CITIES: Issues in Cybersecurity, Privacy, and Public Safety. In Proceedings of the International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar]
- Lee, S.; Choi, Y. Reviews of Unmanned Aerial Vehicle (Drone) Technology Trends and its Applications in the Mining Industry. Geosystem Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Li, C.J.; Ling, H. Synthetic aperture radar imaging using a small consumer drone. In Proceedings of the 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015; pp. 685–686. [Google Scholar]
- Marris, E. Drones in Science: Fly and Bring me Data. Nat. News 2013, 498, 156. [Google Scholar] [CrossRef]
- Emery, J.R. The Possibilities and Pitfalls of Humanitarian Drones. Ethics Int. Aff. 2016, 30, 153–165. [Google Scholar] [CrossRef][Green Version]
- Springer, J. Military Robots and Drones: A Reference Handbook; ABC-CLIO: Santa Barbara, CA, USA, 2013. [Google Scholar]
- Casella, E.; Collin, A.; Harris, D.; Ferse, S.; Bejarano, S.; Parravicini, V.; Hench, J.L.; Rovere, A. Mapping coral reefs using consumer-grade drones and structure from motion photogrammetry techniques. Coral Reefs 2016, 1, 269–275. [Google Scholar] [CrossRef]
- Carlsson, J.G.; Song, S. Coordinated Logistics with a Truck and a Drone. Manag. Sci. 2018, 64, 4052–4069. [Google Scholar] [CrossRef]
- Mourelo Ferrandez, S.; Harbison, T.; Webwer, T.; Sturges, R.; Rich, R. Optimization of a Truck-Drone in Tandem Delivery Network Using K-Means and Genetic Algorithm. J. Ind. Eng. Manag. 2016, 9, 374–388. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Cerro, J.D.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial Remote Sensing in Agriculture: A Practical Approach to Area Coverage and Path Planning for Fleets of Mini Aerial Robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef]
- Scott, J.; Scott, C. Drone Delivery Models for Healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Hilton Waikoloa Village, HI, USA, 4–7 January 2017. [Google Scholar]
- Tadić, S.; Krstić, M.; Zečević, S. Defining the typical structures of the intermodal terminals. In Quantitative Methods in Logistics; Vidović, M., Kilibarda, M., Zečević, S., Radivojević, G., Eds.; Faculty of Transport and Traffic Engineering, University of Belgrade: Beograd, Serbia, 2020; pp. 67–86. [Google Scholar]
- Luppicini, R.; So, A.A. Techno-Ethical Review of Commercial Drone use in the Context of Governance, Ethics, and Privacy. Technol. Soc. 2016, 46, 109–119. [Google Scholar] [CrossRef]
- Sandbrook, C. The Social Implications of Using Drones for Biodiversity Conservation. Ambio 2015, 44, 636–647. [Google Scholar] [CrossRef] [PubMed]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial vehicle technology in reducing CO2 emissions in the delivery service industry. Transp. Res. Part D Transp. Environ. 2017, 61, 58–67. [Google Scholar] [CrossRef]
- Delbecq, A.L.; Ven, A.; Gustafson, D. Group Techniques for Program Planning: A Guide to Nominal Group and Delphi Processes; Scott Forman and Co.: Glenview, IL, USA, 1986. [Google Scholar]
- Safari, H.; Soufi, M.; Aghasi, E. Select a Hypermarket Location Based on Fuzzy Multi Criteria Decision Making (F-MCDM) Techniques (Hybrid of F-Delphi, F-AHP, F-LLSM and F-PROMTHEE). Kuwait Chapter Arab. J. Bus. Manag. Rev. 2014, 4, 76–95. [Google Scholar] [CrossRef][Green Version]
- Zecević, S.; Tadić, S.; Krstić, M. Intermodal transport terminal location selection using a novel hybrid MCDM model. Int. J. Uncertain. Fuzziness Knowl.-Based Syst. 2017, 25, 853–876. [Google Scholar] [CrossRef]
- Pojadas, D.J.; Abundo, M.L.S. A web-based Delphi multi-criteria group decision-making framework for renewable energy project development processes. Int. J. Manag. Decis. Mak. 2020, 19, 426–449. [Google Scholar] [CrossRef]
- Tadić, S.; Krstić, M.; Roso, V.; Brnjac, N. Dry port terminal location selection by applying the hybrid grey MCDM model. Sustainability 2020, 12, 6983. [Google Scholar] [CrossRef]
- Zha, S.; Guo, Y.; Huang, S.; Wang, S. A hybrid MCDM method using combination weight for the selection of facility layout in the manufacturing system: A case study. Math. Probl. Eng. 2020, 2020, 1320173. [Google Scholar] [CrossRef]
- Zhao, H.; Guo, S.; Zhao, H. Comprehensive assessment for battery energy storage systems based on fuzzy-MCDM considering risk preferences. Energy 2019, 168, 450–461. [Google Scholar] [CrossRef]
- Ginevičius, R. A new determining method for the criteria weights in multicriteria evaluation. Int. J. Inf. Technol. Decis. Mak. 2011, 10, 1067–1095. [Google Scholar] [CrossRef]
- Krylovas, A.; Zavadskas, E.K.; Kosareva, N.; Dadelo, S. New KEMIRA method for determining criteria priority and weights in solving MCDM problem. Int. J. Inf. Technol. Decis. Mak. 2014, 13, 1119–1133. [Google Scholar] [CrossRef]
- Chatterjee, P.; Mondal, S.; Boral, A.; Banerjee, A.; Chakraborty, S. A novel hybrid method for non-traditional machining process selection using factor relationship and multi-attributive border approximation. FU Mech. Eng. 2017, 15, 439–456. [Google Scholar] [CrossRef]
- Kazan, H.; Özçelik, S.; Hobikoğlu, E.H. Election of deputy candidates for nomination with AHP-Promethee methods. Procedia Soc. Behav. Sci. 2015, 195, 603–613. [Google Scholar] [CrossRef]
- Roy, J.; Pamučar, D.; Kar, S. Evaluation and selection of third party logistics provider under sustainability perspectives: An interval valued fuzzy-rough approach. Ann. Oper. Res. 2020, 293, 669–714. [Google Scholar] [CrossRef]
- Krstić, M.; Tadić, S.; Elia, V.; Massari, S.; Farooq, M.U. Intermodal Terminal Subsystem Technology Selection Using Integrated Fuzzy MCDM Model. Sustainability 2023, 15, 3427. [Google Scholar] [CrossRef]
- Krstić, M.; Agnusdei, G.P.; Tadić, S.; Miglietta, P. Prioritization of e-traceability drivers in the agri-food supply chains. Agric. Food Econ. 2023, 11, 42. [Google Scholar] [CrossRef]
- Krstić, M.; Tadić, S.; Kovač, M.; Roso, V.; Zečević, S. A novel hybrid MCDM model for the evaluation of sustainable last mile solutions. Math. Probl. Eng. 2021, 2021, 5969788. [Google Scholar] [CrossRef]
- Krstić, M.; Agnusdei, G.P.; Miglietta, P.; Tadić, S.; Roso, V. Applicability of industry 4.0 technologies in the reverse logistics: A circular economy approach based on Comprehensive Distance Based Ranking (COBRA) method. Sustainability 2022, 14, 5632. [Google Scholar] [CrossRef]
- Krstić, M.; Agnusdei, G.P.; Miglietta, P.; Tadić, S. Evaluation of the smart reverse logistics development scenarios using a novel MCDM model. Clean. Environ. Syst. 2022, 7, 100099. [Google Scholar] [CrossRef]
- Krstić, M.; Agnusdei, G.P.; Miglietta, P.; Tadić, S. Logistics 4.0 toward circular economy in the agri-food sector. Sustain. Futures 2022, 4, 100097. [Google Scholar] [CrossRef]
- Popović, G.; Pucar, Đ.; Smarandache, F. MEREC-COBRA approach in e-commerce development strategy selection. J. Process Manag. New Technol. 2022, 10, 66–74. [Google Scholar] [CrossRef]
- Nila, B.; Roy, J. A new hybrid MCDM framework for third-party logistic provider selection under sustainability perspectives. Expert Syst. Appl. 2023, 234, 121009. [Google Scholar]
- Li, H.; Wang, W.; Fan, L.; Li, Q.; Chen, X. A novel hybrid MCDM model for machine tool selection using fuzzy DEMATEL, entropy weighting and later defuzzification VIKOR. Appl. Soft Comput. 2020, 91, 106207. [Google Scholar] [CrossRef]
- Chaurasiya, R.; Jain, D. Hybrid MCDM method on pythagorean fuzzy set and its application. Decis. Mak. Appl. Manag. Eng. 2023, 6, 379–398. [Google Scholar] [CrossRef]
- Alshahrani, R.; Yenugula, M.; Algethami, H.; Alharbi, F.; Goswami, S.S.; Naveed, Q.N.; Lasisi, A.; Islam, S.; Khan, N.A.; Zahmatkesh, S. Establishing the fuzzy integrated hybrid MCDM framework to identify the key barriers to implementing artificial intelligence-enabled sustainable cloud system in an IT industry. Expert Syst. Appl. 2023, 238, 121732. [Google Scholar] [CrossRef]
- Manna, S.; Basu, T.M.; Mondal, S.K. A new algorithmic approach to linguistically valued soft multi-criteria group decision-making problems using linguistic scale function. Appl. Soft Comput. 2019, 83, 105651. [Google Scholar] [CrossRef]
- Herrera-Viedma, E.; Palomares, I.; Li, C.C.; Cabrerizo, F.J.; Dong, Y.; Chiclana, F.; Herrera, F. Revisiting fuzzy and linguistic decision making: Scenarios and challenges for making wiser decisions in a better way. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 191–208. [Google Scholar] [CrossRef]
- Voccia, S.A.; Campbell, A.M.; Thomas, B.W. The Same-Day Delivery Problem for Online Purchases. Transp. Sci. 2019, 13, 167–184. [Google Scholar] [CrossRef]
- Vakulenko, Y.; Shams, P.; Hellström, D.; Hjort, K. Service Innovation in E-Commerce Last Mile Delivery: Mapping the E-Customer Journey. J. Bus. Res. 2019, 101, 461–468. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone Delivery: Factors Affecting the Public’s Attitude and Intention to Adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2020, 24, 531–550. [Google Scholar] [CrossRef]
- Chang, V.; Chundury, P.; Chetty, M. Spiders in the Sky: User Perceptions of Drones, Privacy, and Security. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, ACM 2017, Denver, CO, USA, 6–11 May 2017; pp. 6765–6776. [Google Scholar]
- Bracken, C.; Lyon, R.D.; Mansour, M.J.; Molnar, A.; Saulnier, A.; Thompson, S.; Adams, G.; Masoodi, M.; Sharpe, J. Su Veillance Drones: Privacy Implications of the Spread of Unmanned Aerial Vehicles (UAVs) in Canada; Surveillance Studies Centre, Queen’s University: Kingston, UK, 2014; p. 30. [Google Scholar]
- Sanjab, A.; Saad, W.; Basar, T. Prospect Theory for Enhanced Cyber-Physical Security of Drone Delivery Systems: A Network Interdiction Game. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Kwon, H.; Kim, J.; Park, Y. Applying LSA Text Mining Technique in Envisioning Social Impacts of Emerging Technologies: The Case of Drone Technology. Technovation 2017, 60, 15–28. [Google Scholar] [CrossRef]
- Buko, J.; Bulsa, M.; Makowski, A. Spatial premises and key conditions for the use of UAVs for delivery of items on the example of the polish courier and postal services market. Energies 2022, 15, 1403. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban air mobility: History, ecosystem, market potential, and challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Ravich, T.M. Commercial Drones and the Phantom Menace. J. Int. Media Entertain. Law 2013, 5, 1–35. [Google Scholar] [CrossRef]
- Park, H.J.; Mirjalili, R.; Côté, M.J.; Lim, G.J. Scheduling diagnostic testing kit deliveries with the mothership and drone routing problem. J. Intell. Robot. Syst. 2022, 105, 38. [Google Scholar] [CrossRef] [PubMed]
- Kuru, K. Planning the future of smart cities with swarms of fully autonomous drones using a new framework. IEEE Access 2021, 9, 6571–6595. [Google Scholar] [CrossRef]
- Kapoor, R.; Cloet, N.; Gardi, A.; Mohamed, A.; Sabatini, R. Sound propagation modeling for manned and unmanned aircraft noise assessment and mitigation: A review. Atmosfera 2021, 12, 1424. [Google Scholar]
- Toria, A.J.; Clark, C. A psychoacoustic approach to building knowledge about the human response to drone noise. Int. J. Environ. Res. Public Health 2021, 18, 682. [Google Scholar] [CrossRef] [PubMed]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Life-cycle energy use and greenhouse gas emissions of commercial package delivery drones. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef]
- Toria, A.J.; Li, Z. Self, RH Effects of flying drone on urban soundscape perception. Transp. Res. Part D Transp. Environ. 2020, 78, 102195. [Google Scholar]
- Ahmed, S.S.; Hulme, K.F.; Fountas, G.; Eker, U.; Benedyk, I.V.; Still, S.E.; Anastasopoulos, C. The flying car—Challenges and strategies for future adoption. Front. Built Environ. 2020, 6, 1. [Google Scholar] [CrossRef]
- Çetin, E.; Cano, A.; Deransy, R.; Tres, S.; Barrado, C. Implementing mitigation to improve social acceptance of urban air mobility. Drones 2022, 6, 28. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization Approaches for the Traveling Salesman Problem with Drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Ross, E. Open-source Drones for fun and Profit. IEEE Spectr. 2014, 51, 54–59. [Google Scholar] [CrossRef]
- Hallermann, N.; Morgenthal, G. Unmanned Aerial Vehicles (UAV) for the Assessment of Existing Structures. IABSE Symp. Rep. 2013, 101, 1–8. [Google Scholar]
- Tadić, S.; Kovač, M.; Krstić, M.; Roso, V.; Brnjac, N. The selection of intermodal transport system scenarios in the function of southeastern europe regional development. Sustainability 2021, 13, 5590. [Google Scholar] [CrossRef]
- Paik, B.; Mondal, S.K. A distance-similarity method to solve fuzzy sets and fuzzy soft sets-based decision-making problems. Soft Comput. 2020, 24, 5217–5229. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).