
Existence of Traveling Waves of a Diffusive Susceptible–Infected–Symptomatic–Recovered Epidemic Model with Temporal Delay

 ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
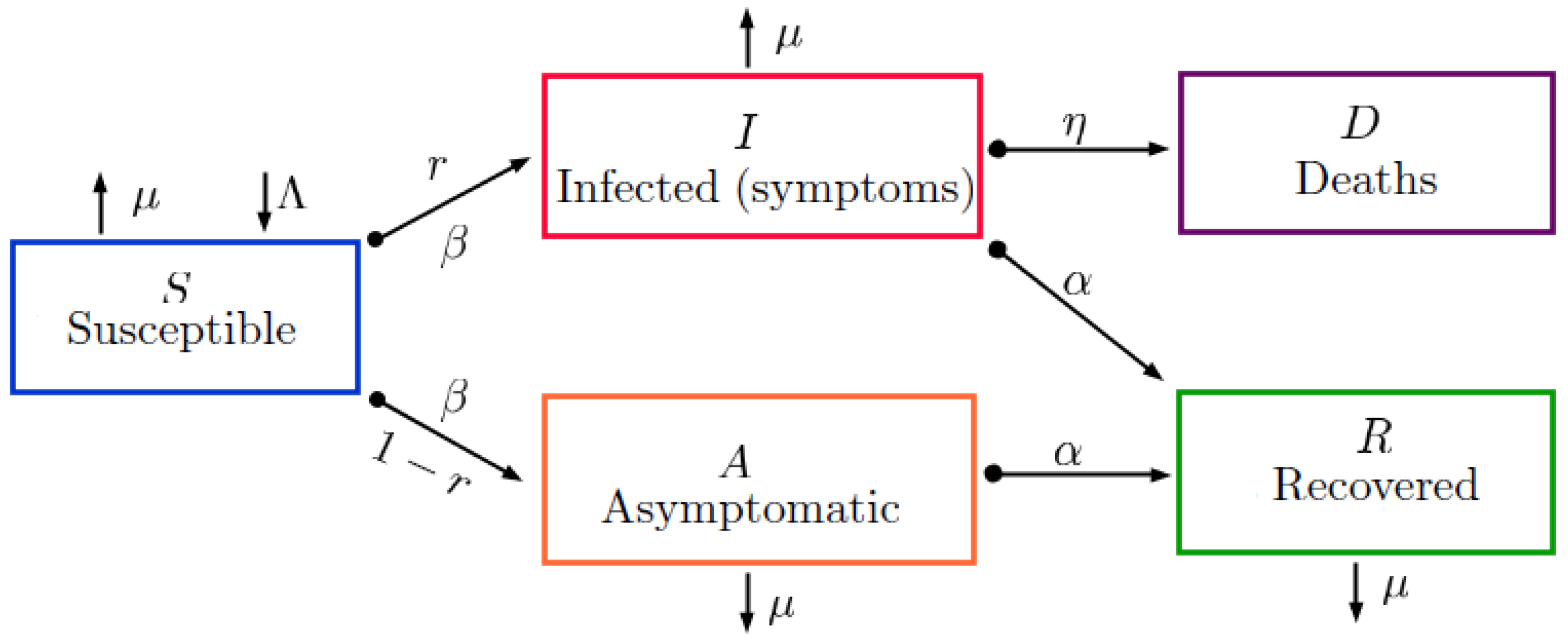
2.1. Mathematical Model
- is the population susceptible to the virus in space and time;
- is the infected population presenting symptoms of the disease and transmitting the virus in space and time;
- is the population infected by the virus that does not present symptoms, that is, it is asymptomatic and transmits the virus in space and time;
- is the population that has recovered from the disease and does not present symptoms of the disease but is under medical treatment.
2.2. Existence of Equilibrium States
3. Existence and Uniqueness of the Solution
- (i)
- ;
- (ii)
- and ;
- (iii)
- and for all and .
4. Local Stability of Equilibrium States
- 1.
- si
- 2.
- , para .
- 3.
- .
- , if . Indeed, set with . It follows thatNow, if , then we have
- , if w is real and . Indeed, given thatwe haveConsequently,The following expression is expanded asNotice thatThus,Sinceandthen . Next, for one obtainsAs then , afterNow,andNow, recall thatthenThus, Finally, let us consider , where is given byHence, . Thus, for all .
- Let us show that Indeed, suppose that , with . Then, , and if (), we haveHowever, yieldsTherefore, if ,
- 1.
- If the infection-free state of is locally asymptotically stable.
- 2.
- If , the endemic balance is locally asymptotically stable, if .
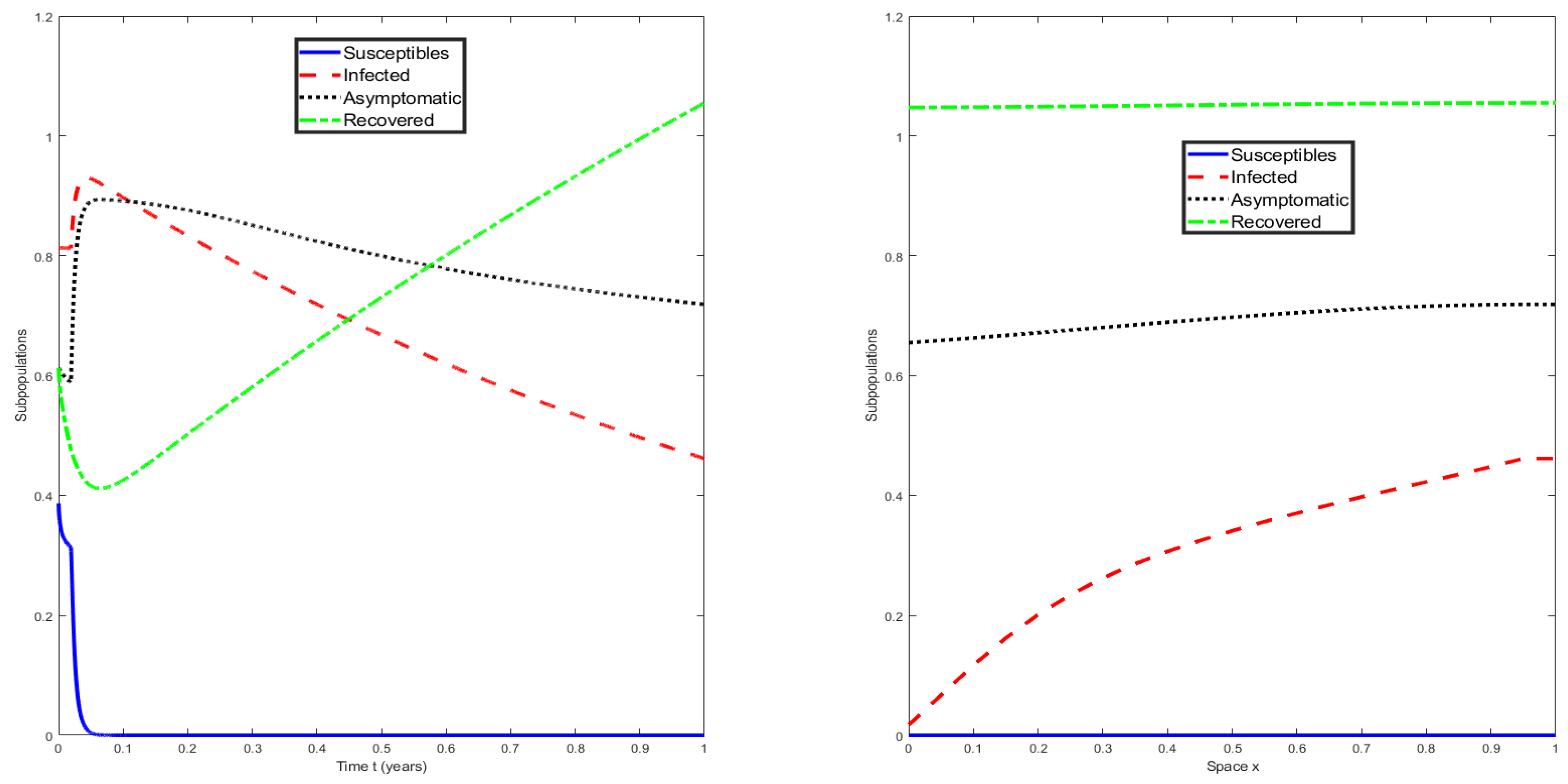
5. Numerical Simulations of the Mathematical Model
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- 1.
- si for .
- 2.
- si and for .
- 3.
- .
- A function has a certain property in almost everywhere (a.e) in if it has the property in except on a set of measure zero (see [49], Chapter 11).
- The notationindicates that and exist for .
- (i)
- .
- (ii)
- (iii)
- and for all and .
- (i)
- for and .
- (ii)
- for , , and .
- (i)
- If and , we have
- (ii)
- For and we obtain
- (i)
- for .
- (ii)
- for , .
- (iii)
- for .
References
- Hethcote, H.W. Mathematics of infectious diseases. SIAM Rev. 2005, 42, 599–653. [Google Scholar] [CrossRef]
- Arino, J.; Van Den Driessche, P. Time delays in epidemic models. Delay Differ. Equ. Appl. Nato Sci. Ser. 2006, 205, 539–578. [Google Scholar]
- Brauer, F.; Castillo-Chavez, C. Mathematical Models for Communicable Diseases; SIAM: Philadelphia, PA, USA, 2012. [Google Scholar]
- Schiesser, W.E. Mathematical Modeling Approach to Infectious Diseases, A: Cross Diffusion Pde Models for Epidemiology; World Scientific: Singapore, 2018. [Google Scholar]
- Trejos, D.Y.; Valverde, J.C.; Venturino, E. Dynamics of infectious diseases: A review of the main biological aspects and their mathematical translation. Appl. Math. Nonlinear Sci. 2022, 7, 1–26. [Google Scholar] [CrossRef]
- Aràndiga, F.; Baeza, A.; Cordero-Carrión, I.; Donat, R.; Martí, M.C.; Mulet, P.; Yáñez, D.F. A spatial-temporal model for the evolution of the COVID-19 pandemic in Spain including mobility. Mathematics 2020, 8, 1677. [Google Scholar] [CrossRef]
- Agrawal, M.; Kanitkar, M.; Vidyasagar, M. Modelling the spread of SARS-CoV-2 pandemic-Impact of lockdowns and interventions. Indian J. Med. Res. 2021, 153, 175. [Google Scholar]
- González-Parra, G.; Arenas, A.J. Mathematical Modeling of SARS-CoV-2 Omicron Wave under Vaccination Effects. Computation 2023, 11, 36. [Google Scholar] [CrossRef]
- Görtz, M.; Krug, J. Nonlinear dynamics of an epidemic compartment model with asymptomatic infections and mitigation. J. Phys. Math. Theor. 2022, 55, 414005. [Google Scholar] [CrossRef]
- Goel, K.; Nilam. A nonlinear SAIR epidemic model: Effect of awareness class, nonlinear incidences, saturated treatment and time delay. Ric. Mat. 2022, 1–35. [Google Scholar] [CrossRef]
- Yang, J.; Liang, S.; Zhang, Y. Travelling waves of a delayed SIR epidemic model with nonlinear incidence rate and spatial diffusion. PLoS ONE 2011, 6, e21128. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Zou, X. Traveling wave fronts of reaction-diffusion systems with delay. J. Dyn. Differ. Equ. 2001, 13, 651–687. [Google Scholar] [CrossRef]
- Tian, C.; Lin, Z. Traveling wave solutions for delayed reaction-diffusion systems. arXiv 2010, arXiv:1007.3429. [Google Scholar]
- Zou, X.; Wu, J. Existence of traveling wave fronts in delayed reaction-diffusion systems via the monotone iteration method. Proc. Am. Math. Soc. 1997, 125, 2589–2598. [Google Scholar] [CrossRef]
- Wu, X.; Tian, B.; Yuan, R. Traveling waves in an SEIR epidemic model with a general nonlinear incidence rate. Appl. Anal. 2020, 99, 133–157. [Google Scholar] [CrossRef]
- Wachira, C.; Lawi, G.; Omondi, L. Travelling Wave Analysis of a Diffusive COVID-19 Model. J. Appl. Math. 2022, 2022, 6052274. [Google Scholar] [CrossRef]
- Alaoui, A.L.; Ammi, M.R.S.; Tilioua, M.; Torres, D.F. Global stability of a diffusive SEIR epidemic model with distributed delay. In Mathematical Analysis of Infectious Diseases; Elsevier: Amsterdam, The Netherlands, 2022; pp. 191–209. [Google Scholar]
- Ma, Y.; Cui, Y.; Wang, M. Global stability and control strategies of a SIQRS epidemic model with time delay. Math. Methods Appl. Sci. 2022, 45, 8269–8293. [Google Scholar] [CrossRef]
- Samanta, G.; Sen, P.; Maiti, A. A delayed epidemic model of diseases through droplet infection and direct contact with saturation incidence and pulse vaccination. Syst. Sci. Control. Eng. 2016, 4, 320–333. [Google Scholar] [CrossRef]
- Sultana, S.; González-Parra, G.; Arenas, A.J. Dynamics of toxoplasmosis in the cat’s population with an exposed stage and a time delay. Math. Biosci. Eng. 2022, 19, 12655–12676. [Google Scholar] [CrossRef] [PubMed]
- Tchuenche, J.M.; Nwagwo, A. Local stability of an SIR epidemic model and effect of time delay. Math. Methods Appl. Sci. 2009, 32, 2160–2175. [Google Scholar] [CrossRef]
- Gutiérrez-Jara, J.P.; Vogt-Geisse, K.; Cabrera, M.; Córdova-Lepe, F.; Muñoz-Quezada, M.T. Effects of human mobility and behavior on disease transmission in a COVID-19 mathematical model. Sci. Rep. 2022, 12, 10840. [Google Scholar] [CrossRef] [PubMed]
- Kevrekidis, P.G.; Cuevas-Maraver, J.; Drossinos, Y.; Rapti, Z.; Kevrekidis, G.A. Reaction-diffusion spatial modeling of COVID-19: Greece and Andalusia as case examples. Phys. Rev. E 2021, 104, 024412. [Google Scholar] [CrossRef] [PubMed]
- Beretta, E.; Takeuchi, Y. Global stability of an SIR epidemic model with time delays. J. Math. Biol. 1995, 33, 250–260. [Google Scholar] [CrossRef]
- Chen-Charpentier, B. Delays and Exposed Populations in Infection Models. Mathematics 2023, 11, 1919. [Google Scholar] [CrossRef]
- Kuang, Y. Delay Differential Equations: With Applications in Population Dynamics; Academic Press: Cambridge, MA, USA, 1993. [Google Scholar]
- Ma, W.; Song, M.; Takeuchi, Y. Global stability of an SIR epidemicmodel with time delay. Appl. Math. Lett. 2004, 17, 1141–1145. [Google Scholar] [CrossRef]
- Nastasi, G.; Perrone, C.; Taffara, S.; Vitanza, G. A time-delayed deterministic model for the spread of COVID-19 with calibration on a real dataset. Mathematics 2022, 10, 661. [Google Scholar] [CrossRef]
- Zaman, G.; Kang, Y.H.; Jung, I.H. Optimal treatment of an SIR epidemic model with time delay. BioSystems 2009, 98, 43–50. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Sun, G.Q.; Jin, Z. Pattern formation of an epidemic model with time delay. Phys. A Stat. Mech. Its Appl. 2014, 403, 100–109. [Google Scholar] [CrossRef]
- Gan, Q.; Xu, R.; Yang, P. Travelling waves of a delayed SIRS epidemic model with spatial diffusion. Nonlinear Anal. Real World Appl. 2011, 12, 52–68. [Google Scholar] [CrossRef]
- Smith, H. An Introduction to Delay Differential Equations with Applications to the Life Sciences; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Viguerie, A.; Lorenzo, G.; Auricchio, F.; Baroli, D.; Hughes, T.J.; Patton, A.; Reali, A.; Yankeelov, T.E.; Veneziani, A. Simulating the spread of COVID-19 via a spatially-resolved susceptible-exposed-infected-recovered-deceased (SEIRD) model with heterogeneous diffusion. Appl. Math. Lett. 2021, 111, 106617. [Google Scholar] [CrossRef] [PubMed]
- Lin, Z.; Pedersen, M.; Tian, C. Traveling wave solutions for reaction-diffusion systems. Nonlinear Anal. Theory Methods Appl. 2010, 73, 3303–3313. [Google Scholar] [CrossRef]
- Hernández, E.; Trofimchuk, S. Nonstandard quasi-monotonicity: An application to the wave existence in a neutral KPP-Fisher equation. J. Dyn. Differ. Equ. 2020, 32, 921–939. [Google Scholar] [CrossRef]
- Brauer, F. Absolute stability in delay equations. J. Differ. Equ. 1987, 69, 185–191. [Google Scholar] [CrossRef]
- Armstrong, E.; Runge, M.; Gerardin, J. Identifying the measurements required to estimate rates of COVID-19 transmission, infection, and detection, using variational data assimilation. Infect. Dis. Model. 2021, 6, 133–147. [Google Scholar] [CrossRef]
- Bastos, S.B.; Morato, M.M.; Cajueiro, D.O.; Normey-Rico, J.E. The COVID-19 (SARS-CoV-2) uncertainty tripod in Brazil: Assessments on model-based predictions with large under-reporting. Alex. Eng. J. 2021, 60, 4363–4380. [Google Scholar] [CrossRef]
- Libotte, G.B.; Dos Anjos, L.; Almeida, R.C.; Malta, S.M.; Silva, R.S. Framework for enhancing the estimation of model parameters for data with a high level of uncertainty. Nonlinear Dyn. 2022, 107, 1919–1936. [Google Scholar] [CrossRef] [PubMed]
- Olivares, A.; Staffetti, E. Uncertainty quantification of a mathematical model of COVID-19 transmission dynamics with mass vaccination strategy. Chaos Solitons Fractals 2021, 146, 110895. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Daza, A.; Medina-Ortiz, D.; Olivera-Nappa, A.; Contreras, S. COVID-19 modeling under uncertainty: Statistical data analysis for unveiling true spreading dynamics and guiding correct epidemiological management. In Modeling, Control and Drug Development for COVID-19 Outbreak Prevention; Springer: Berlin/Heidelberg, Germany, 2022; pp. 245–282. [Google Scholar]
- Yau, M.A. Analysis of Spatial Dynamics and Time Delays in Epidemic Models. Ph.D. Thesis, University of Sussex, Brighton, UK, 2014. [Google Scholar]
- Angstmann, C.N.; Henry, B.I.; Jacobs, B.A.; McGann, A.V. Numeric solution of advection-diffusion equations by a discrete time random walk scheme. Numer. Methods Partial. Differ. Equ. 2020, 36, 680–704. [Google Scholar] [CrossRef]
- Yang, C.; Sun, T. Crank-Nicolson finite difference schemes for parabolic optimal Dirichlet boundary control problems. Math. Methods Appl. Sci. 2022, 45, 7346–7363. [Google Scholar] [CrossRef]
- Calvetti, D.; Somersalo, E. Post-pandemic modeling of COVID-19: Waning immunity determines recurrence frequency. Math. Biosci. 2023, 365, 109067. [Google Scholar] [CrossRef] [PubMed]
- Luebben, G.; González-Parra, G.; Cervantes, B. Study of optimal vaccination strategies for early COVID-19 pandemic using an age-structured mathematical model: A case study of the USA. Math. Biosci. Eng. 2023, 20, 10828–10865. [Google Scholar] [CrossRef] [PubMed]
- Viguerie, A.; Carletti, M.; Silvestri, G.; Veneziani, A. Mathematical Modeling of Periodic Outbreaks with Waning Immunity: A Possible Long-Term Description of COVID-19. Mathematics 2023, 11, 4918. [Google Scholar] [CrossRef]
- Yu, Z.X.; Yuan, R. Traveling waves of delayed reaction-diffusion systems with applications. Nonlinear Anal. Real World Appl. 2011, 12, 2475–2488. [Google Scholar] [CrossRef]
- Rudin, W. Principles of Mathematical Analysis; McGraw-Hill: New York, NY, USA, 1953; Volume 3. [Google Scholar]
- Zeidler, E.; Wadsack, P.R. Nonlinear Functional Analysis and Its Applications: Fixed-Point Theorems; Wadsack, P.R., Translator; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miranda, J.C.; Arenas, A.J.; González-Parra, G.; Villada, L.M. Existence of Traveling Waves of a Diffusive Susceptible–Infected–Symptomatic–Recovered Epidemic Model with Temporal Delay. Mathematics 2024, 12, 710. https://doi.org/10.3390/math12050710
Miranda JC, Arenas AJ, González-Parra G, Villada LM. Existence of Traveling Waves of a Diffusive Susceptible–Infected–Symptomatic–Recovered Epidemic Model with Temporal Delay. Mathematics. 2024; 12(5):710. https://doi.org/10.3390/math12050710
Chicago/Turabian StyleMiranda, Julio C., Abraham J. Arenas, Gilberto González-Parra, and Luis Miguel Villada. 2024. "Existence of Traveling Waves of a Diffusive Susceptible–Infected–Symptomatic–Recovered Epidemic Model with Temporal Delay" Mathematics 12, no. 5: 710. https://doi.org/10.3390/math12050710
APA StyleMiranda, J. C., Arenas, A. J., González-Parra, G., & Villada, L. M. (2024). Existence of Traveling Waves of a Diffusive Susceptible–Infected–Symptomatic–Recovered Epidemic Model with Temporal Delay. Mathematics, 12(5), 710. https://doi.org/10.3390/math12050710