
Next Arrival and Destination Prediction via Spatiotemporal Embedding with Urban Geography and Human Mobility Data




Abstract
1. Introduction
2. Literature Review
2.1. Human Mobility Forecasting
2.2. Urban Functionality and Trip Purpose Discovery
2.3. Graph Embedding Techniques
3. Preliminary
3.1. Definitions and Problem Statement
3.2. Framework Overview
4. Proposed Model
4.1. Embedding Method
4.2. Time-Aware Embedding Method Destination Prediction with Regional Function Detection
4.3. Parameter Learning
5. Results
5.1. Experimental Data
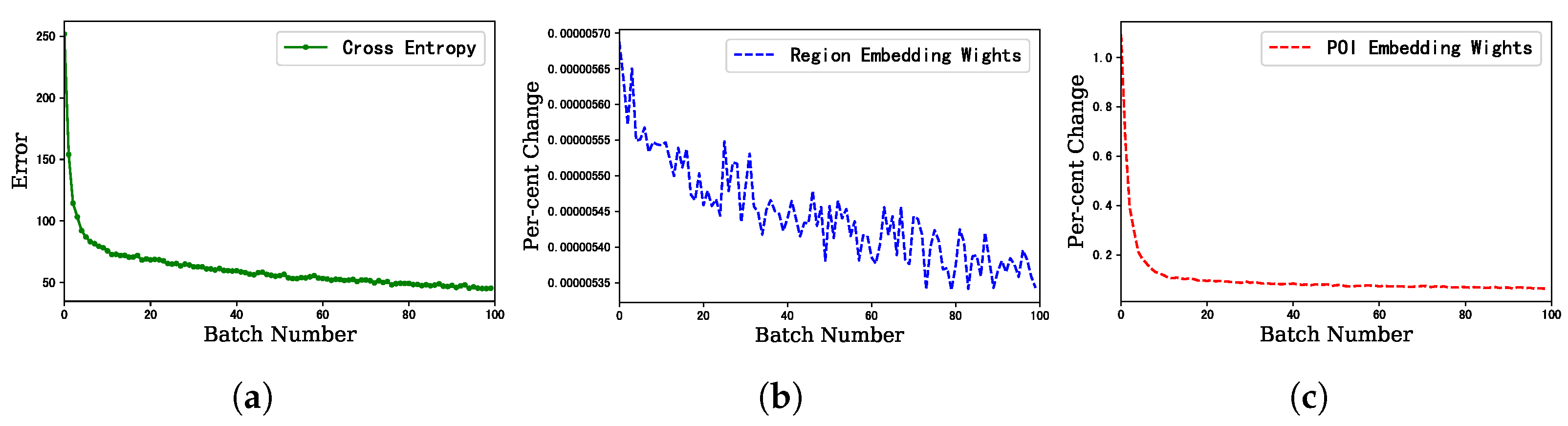
5.2. Model Setup and Model Convergence
5.3. Event Prediction
- Random: Randomly choose K regions from all the regions in the city as destinations;
- DescisionTree: Given the origin regions, we rank the destination regions according to the probabilities learned by the DescisionTree function.
- LinearRegression: We can construct input data with POI distribution according to the O-D pair events history. Therefore, we can apply the LinearRegression multiple classifiers to obtain the top-rank regions for origin and destination.
- RandomForest: Using LinearRegression, we also transfer the problem into a multiple classifiers question. Then, we can use RandomForest to predict the next destination for a given region.
5.4. Regional Function Detection
5.5. Robustness Validation
5.6. Summary
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cui, P.; Liu, H.; Aggarwal, C.; Wang, F. Uncovering and predicting human behaviors. IEEE Intell. Syst. 2016, 31, 77–88. [Google Scholar] [CrossRef]
- Zhao, J.; Li, J.; Cheng, Y.; Zhou, L.; Sim, T.; Yan, S.; Feng, J. Understanding Humans in Crowded Scenes: Deep Nested Adversarial Learning and A New Benchmark for Multi-Human Parsing. arXiv 2018, arXiv:1804.03287. [Google Scholar]
- Long, Q.; Fang, Z.; Fang, C.; Chen, C.; Wang, P.; Zhou, Y. Unveiling Delay Effects in Traffic Forecasting: A Perspective from Spatial-Temporal Delay Differential Equations. In Proceedings of the ACM on Web Conference 2024, Singapore, 13–17 May 2024; pp. 1035–1044. [Google Scholar]
- Zhou, Y.; Wang, P.; Dong, H.; Zhang, D.; Yang, D.; Fu, Y.; Wang, P. Make Graph Neural Networks Great Again: A Generic Integration Paradigm of Topology-Free Patterns for Traffic Speed Prediction. arXiv 2024, arXiv:2406.16992. [Google Scholar]
- Li, Z.; Zheng, G.; Agarwal, A.; Xue, L.; Lauvaux, T. Discovery of causal time intervals. In Proceedings of the 2017 SIAM International Conference on Data Mining, Houston, TX, USA, 27–29 April 2017; SIAM: New Delhi, India, 2017; pp. 804–812. [Google Scholar]
- Xu, J.; Tan, P.N.; Luo, L.; Zhou, J. Gspartan: A geospatio-temporal multi-task learning framework for multi-location prediction. In Proceedings of the 2016 SIAM International Conference on Data Mining, Miami, FL, USA, 5–7 May 2016; SIAM: New Delhi, India, 2016; pp. 657–665. [Google Scholar]
- Prasad, S.K.; Aghajarian, D.; McDermott, M.; Shah, D.; Mokbel, M.; Puri, S.; Rey, S.J.; Shekhar, S.; Xe, Y.; Vatsavai, R.R.; et al. Parallel Processing over Spatial-Temporal Datasets from Geo, Bio, Climate and Social Science Communities: A Research Roadmap. In Proceedings of the 2017 IEEE International Congress on Big Data (BigData Congress), Honolulu, HI, USA, 25–30 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 232–250. [Google Scholar]
- Sarkar, S.; Chawla, S.; Ahmad, S.; Srivastava, J.; Hammady, H.; Filali, F.; Znaidi, W.; Borge-Holthoefer, J. Effective urban structure inference from traffic flow dynamics. IEEE Trans. Big Data 2017, 3, 181–193. [Google Scholar] [CrossRef]
- Zhao, L.; Sun, Q.; Ye, J.; Chen, F.; Lu, C.T.; Ramakrishnan, N. Feature constrained multi-task learning models for spatiotemporal event forecasting. IEEE Trans. Knowl. Data Eng. 2017, 29, 1059–1072. [Google Scholar] [CrossRef]
- Chen, H.; Tang, F.; Tino, P.; Cohn, A.G.; Yao, X. Model Metric Co-Learning for Time Series Classification. In Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, Buenos Aires, Argentina, 25–31 July 2015; AAAI Press: Washington, DC, USA, 2015; pp. 3387–3394. [Google Scholar]
- Wang, M.; Yang, S.; Sun, Y.; Gao, J. Human mobility prediction from region functions with taxi trajectories. PLoS ONE 2017, 12, e0188735. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, K.; Liang, Y.; Wang, B.; Chen, H.; Wang, Y. Predicting collective human mobility via countering spatiotemporal heterogeneity. IEEE Trans. Mob. Comput. 2023, 5, 4723–4738. [Google Scholar] [CrossRef]
- Zhang, H.T.; Zhu, T.; Fu, D.; Xu, B.; Han, X.P.; Chen, D. Spatiotemporal property and predictability of large-scale human mobility. Phys. A Stat. Mech. Its Appl. 2018, 495, 40–48. [Google Scholar] [CrossRef]
- Chai, D.; Wang, L.; Yang, Q. Bike Flow Prediction with Multi-Graph Convolutional Networks. arXiv 2018, arXiv:1807.10934. [Google Scholar]
- Li, L.; Deng, H.; Dong, A.; Chang, Y.; Zha, H. Identifying and labeling search tasks via query-based hawkes processes. In Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 24–27 August 2014; ACM: New York, NY, USA, 2014; pp. 731–740. [Google Scholar]
- Pravilovic, S.; Bilancia, M.; Appice, A.; Malerba, D. Using multiple time series analysis for geosensor data forecasting. Inf. Sci. 2017, 380, 31–52. [Google Scholar] [CrossRef]
- Aramendi, A.A.; Weakley, A.; Schmitter-Edgecombe, M.; Cook, D.J.; Goenaga, A.A.; Basarab, A.; Carrasco, M.B. Smart home-based prediction of multi-domain symptoms related to Alzheimer’s Disease. IEEE J. Biomed. Health Inform. 2018, 22, 1720–1731. [Google Scholar]
- Zheng, Y.; Capra, L.; Wolfson, O.; Yang, H. Urban Computing: Concepts, methodologies, and applications. ACM Trans. Intell. Syst. Technol. 2014, 5, 2157–6904. [Google Scholar] [CrossRef]
- Yan, Z.; Chakraborty, D.; Parent, C.; Spaccapietra, S.; Aberer, K. Semantic trajectories: Mobility data computation and annotation. ACM Trans. Intell. Syst. Technol. (TIST) 2013, 4, 49. [Google Scholar] [CrossRef]
- Dewri, R.; Annadata, P.; Eltarjaman, W.; Thurimella, R. Inferring trip destinations from driving habits data. In Proceedings of the 12th ACM Workshop on Workshop on Privacy in the Electronic Society, Berlin, Germany, 4 November 2013; ACM: New York, NY, USA, 2013; pp. 267–272. [Google Scholar]
- Furletti, B.; Cintia, P.; Renso, C.; Spinsanti, L. Inferring human activities from GPS tracks. In Proceedings of the 2nd ACM SIGKDD International Workshop on Urban Computing, Chicago, IL, USA, 11 August 2013. [Google Scholar]
- Zhu, Z.; Blanke, U.; Tröster, G. Inferring travel purpose from crowd-augmented human mobility data. In Proceedings of the First International Conference on IoT in Urban Space. ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering), Rome, Italy, 27–28 October 2014; pp. 44–49. [Google Scholar]
- Lin, Y.; Wan, H.; Jiang, R.; Wu, Z.; Jia, X. Inferring the travel purposes of passenger groups for better understanding of passengers. IEEE Trans. Intell. Transp. Syst. 2015, 16, 235–243. [Google Scholar] [CrossRef]
- Dhananjaya, D.; Sivakumar, T. Enhancing the POI data for trip purpose inference using machine learning techniques. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 3496–3501. [Google Scholar]
- Lian, D.; Xie, X.; Zheng, V.W.; Yuan, N.J.; Zhang, F.; Chen, E. CEPR: A collaborative exploration and periodically returning model for location prediction. ACM Trans. Intell. Syst. Technol. (TIST) 2015, 6, 8. [Google Scholar] [CrossRef]
- Kumar, R.; Mahdian, M.; Pang, B.; Tomkins, A.; Vassilvitskii, S. Driven by food: Modeling geographic choice. In Proceedings of the Eighth ACM International Conference on Web Search and Data Mining, Shanghai, China, 2–6 February 2015; ACM: New York, NY, USA, 2015; pp. 213–222. [Google Scholar]
- Sadilek, A.; Kautz, H.; Bigham, J.P. Finding your friends and following them to where you are. In Proceedings of the Fifth ACM International Conference on Web Search and Data Mining, Seattle, DC, USA, 8–12 February 2012; ACM: New York, NY, USA, 2012; pp. 723–732. [Google Scholar]
- Goyal, P.; Ferrara, E. Graph embedding techniques, applications, and performance: A survey. Knowl.-Based Syst. 2018, 151, 78–94. [Google Scholar] [CrossRef]
- Tang, J.; Qu, M.; Wang, M.; Zhang, M.; Yan, J.; Mei, Q. LINE: Large-scale Information Network Embedding. In Proceedings of the 24th International Conference on World Wide Web, Florence, Italy, 18–22 May 2015; Volume 2, pp. 1067–1077. [Google Scholar]
- Wang, D.; Cui, P.; Zhu, W. Structural Deep Network Embedding. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 1225–1234. [Google Scholar]
- Xu, L.; Wei, X.; Cao, J.; Yu, P.S. On Exploring Semantic Meanings of Links for Embedding Social Networks. In Proceedings of the 2018 World Wide Web Conference on World Wide Web. International World Wide Web Conferences Steering Committee, Lyon, France, 23–27 April 2018; pp. 479–488. [Google Scholar]
- Guo, J.; Xu, L.; Huang, X.; Chen, E. Enhancing Network Embedding with Auxiliary Information: An Explicit Matrix Factorization Perspective. In Proceedings of the International Conference on Database Systems for Advanced Applications, Gold Coast, QLD, Australia, 21–24 May 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 3–19. [Google Scholar]
- Liu, Z.; Zheng, V.W.; Zhao, Z.; Zhu, F.; Chang, K.C.C.; Wu, M.; Ying, J. Semantic Proximity Search on Heterogeneous Graph by Proximity Embedding. In Proceedings of the AAAI, San Francisco, CA, USA, 4–9 February 2017; pp. 154–160. [Google Scholar]
- Perozzi, B.; Al-Rfou, R.; Skiena, S. Deepwalk: Online learning of social representations. In Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 24–27 August 2014; ACM: New York, NY, USA, 2014; pp. 701–710. [Google Scholar]
- Wang, Z.; Zhang, J.; Feng, J.; Chen, Z. Knowledge Graph Embedding by Translating on Hyperplanes. In Proceedings of the AAAI, Québec City, QC, Canada, 27–31 July 2014; Volume 14, pp. 1112–1119. [Google Scholar]
- Cui, P.; Liu, S.; Zhu, W. General Knowledge Embedded Image Representation Learning. IEEE Trans. Multimed. 2018, 20, 198–207. [Google Scholar] [CrossRef]
- Li, J.; Fu, X.; Zhu, S.; Peng, H.; Wang, S.; Sun, Q.; Philip, S.Y.; He, L. A robust and generalized framework for adversarial graph embedding. IEEE Trans. Knowl. Data Eng. 2023, 35, 11004–11018. [Google Scholar] [CrossRef]
- Sun, F.; Guo, J.; Lan, Y.; Xu, J.; Cheng, X. Sparse word embeddings using l1 regularized online learning. In Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence, New York, NY, USA, 9–15 July 2016; AAAI Press: Washington, DC, USA, 2016; pp. 2915–2921. [Google Scholar]
- Xie, M.; Yin, H.; Xu, F.; Wang, H.; Zhou, X. Graph-Based Metric Embedding for Next POI Recommendation. In Web Information Systems Engineering–WISE 2016: 17th International Conference, Shanghai, China, 8–10 November 2016, Proceedings, Part II 17; Springer International Publishing: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Huang, K.; Gardner, M.; Papalexakis, E.; Faloutsos, C.; Sidiropoulos, N.; Mitchell, T.; Talukdar, P.P.; Fu, X. Translation invariant word embeddings. In Proceedings of the 2015 Conference on Empirical Methods in Natural Language Processing, Lisbon, Portugal, 17–21 September 2015; pp. 1084–1088. [Google Scholar]
- Tang, J.; Hall, W. Cross-Domain Ranking via Latent Space Learning. In Proceedings of the AAAI, San Francisco, CA, USA, 4–9 February 2017; pp. 2618–2624. [Google Scholar]
- Ye, H.J.; Zhan, D.C.; Jiang, Y.; Zhou, Z.H. Rectify Heterogeneous Models with Semantic Mapping. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 5630–5639. [Google Scholar]
- Yuan, N.J.; Zheng, Y.; Xie, X.; Wang, Y.; Zheng, K.; Xiong, H. Discovering urban functional zones using latent activity trajectories. IEEE Trans. Knowl. Data Eng. 2015, 27, 712–725. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Hendrycks, D.; Dietterich, T.G. Benchmarking Neural Network Robustness to Common Corruptions and Surface Variations. arXiv 2018, arXiv:1807.01697. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| Z | The overall POI distribution across the entire city |
| The POI distribution associated with the n-th event’s destination | |
| A simplex of dimension () | |
| Number of POIs near the origin point o | |
| Number of POIs near the destination point d | |
| R | Total number of regions in the city |
| L | Total number of POI categories |
| K | Number of POI topics |
| N | Total number of trajectories |
| E | A sequence of arrivals |
| A specific event represented by a three-element tuple, () | |
| T | Time slot of the event |
| Weight matrix of region embedding | |
| Weight matrix of POI embedding |
| Method | @1 | @5 | @10 | @15 | @20 | @25 | @30 | @35 | @40 | @45 | @50 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Random | 0.000485 | 0.00244 | 0.005 | 0.007575 | 0.010015 | 0.01242 | 0.015 | 0.017575 | 0.020035 | 0.02238 | 0.02483 |
| DescisionTree | 0.002425 | 0.006875 | 0.01159 | 0.011795 | 0.01211 | 0.0163 | 0.01919 | 0.026865 | 0.03101 | 0.03419 | 0.034 |
| LinearRegression | 0.00245 | 0.0069 | 0.011615 | 0.01182 | 0.012135 | 0.016325 | 0.019215 | 0.02689 | 0.031035 | 0.034215 | 0.03459 |
| RandomForest | 0.00246 | 0.0069 | 0.011615 | 0.01182 | 0.012135 | 0.016325 | 0.019215 | 0.02689 | 0.031035 | 0.034215 | 0.03459 |
| TPRM | 0.002 | 0.0071 | 0.0102 | 0.012 | 0.0124 | 0.0166 | 0.0208 | 0.0272 | 0.032 | 0.0348 | 0.0358 |
| Function 1 | Value | Function 2 | Value | Function 3 | Value | Function 4 | Value | Function 5 | Value |
|---|---|---|---|---|---|---|---|---|---|
| Highway or Road | 2.828 | Religious Center | 2.0133 | Beer Garden | 2.111 | Moroccan Rest. | 2.702 | Garden | 2.053 |
| Sculpture Garden | 2.409 | College Dorm | 1.516 | Candy Store | 1.848 | Fraternity House | 2.470 | Golf Course | 1.770 |
| Cupcake Shop | 1.965 | College Quad | 1.419 | College Cafeteria | 1.788 | Ethiopian Rest. | 2.296 | Steakhouse | 1.727 |
| Lake | 1.842 | Bookstore | 1.292 | Medical Center | 1.759 | Caribbean Rest. | 1.944 | Hot Spring | 1.620 |
| Basketball Court | 1.761 | Salon or Barbershop | 1.092 | Stadium | 1.752 | Cuban Rest. | 1.881 | Ski Area | 1.493 |
| Ski Area | 1.758 | Hotel | 1.057 | Design Studio | 1.662 | Subway | 1.653 | Asian Rest. | 1.450 |
| Library | 1.747 | Airport | 1.011 | Molecular Rest. | 1.642 | Pool Hall | 1.465 | Comedy Club | 1.432 |
| Field | 1.709 | Light Rail | 0.990 | Religious Center | 1.573 | Karaoke Bar | 1.442 | College Admin. | 1.424 |
| Racetrack | 1.651 | Bus Station | 0.944 | Dog Run | 1.474 | German Rest. | 1.395 | General College | 1.409 |
| Hiking Trail | 1.623 | Embassy/Consulate | 0.938 | New American Rest. | 1.322 | Gift Shop | 1.354 | College Library | 1.318 |
| Function 6 | Value | Function 7 | Value | Function 8 | Value | Function 9 | Value | Function 10 | Value |
| Argentinian Rest. | 2.954 | Wings Joint | 2.258 | Music Store | 2.898 | Tanning Salon | 2.082 | Juice Bar | 2.181 |
| Antique Shop | 2.022 | Casino | 1.966 | Australian Rest. | 2.650 | Mall | 1.913 | Paper/Office Store | 2.164 |
| Brewery | 1.871 | Resort | 1.910 | Flea Market | 2.114 | Apartment Build. | 1.871 | Taco Place | 1.806 |
| Water Park | 1.867 | Gastropub | 1.672 | Argentinian Rest. | 2.043 | Bowling Alley | 1.861 | Gaming Cafe | 1.738 |
| Video Store | 1.851 | Convenience Store | 1.612 | South American Rest. | 1.716 | Mediterranean Rest. | 1.778 | Lighthouse | 1.629 |
| Bowling Alley | 1.835 | Beer Garden | 1.566 | Tapas Rest. | 1.565 | Fried Chicken Joint | 1.748 | Moroccan Rest. | 1.499 |
| Comedy Club | 1.774 | Design Studio | 1.497 | Molecular Rest. | 1.544 | South American Rest. | 1.703 | Malaysian Rest. | 1.478 |
| Fast Food Rest. | 1.764 | Beach | 1.446 | Bank | 1.303 | Skate Park | 1.633 | Nightclub | 1.358 |
| Bookstore | 1.661 | Hostel | 1.351 | Taco Place | 1.216 | Internet Cafe | 1.508 | Swiss Rest. | 1.344 |
| Resort | 1.628 | Sports Bar | 1.342 | Dessert Shop | 1.111 | Toy or Game Store | 1.435 | Burrito Place | 1.309 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Wang, Z.; Zhang, X.; Wang, P.; Liu, K. Next Arrival and Destination Prediction via Spatiotemporal Embedding with Urban Geography and Human Mobility Data. Mathematics 2025, 13, 746. https://doi.org/10.3390/math13050746
Li P, Wang Z, Zhang X, Wang P, Liu K. Next Arrival and Destination Prediction via Spatiotemporal Embedding with Urban Geography and Human Mobility Data. Mathematics. 2025; 13(5):746. https://doi.org/10.3390/math13050746
Chicago/Turabian StyleLi, Pengjiang, Zaitian Wang, Xinhao Zhang, Pengfei Wang, and Kunpeng Liu. 2025. "Next Arrival and Destination Prediction via Spatiotemporal Embedding with Urban Geography and Human Mobility Data" Mathematics 13, no. 5: 746. https://doi.org/10.3390/math13050746
APA StyleLi, P., Wang, Z., Zhang, X., Wang, P., & Liu, K. (2025). Next Arrival and Destination Prediction via Spatiotemporal Embedding with Urban Geography and Human Mobility Data. Mathematics, 13(5), 746. https://doi.org/10.3390/math13050746